
Stability and Optimal Control Analysis for a Fractional-Order Industrial Virus-Propagation Model Based on SCADA System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (i)
- The existence conditions and the locally asymptotic stability criterion are established for virus-free and virus-present equilibrium points in the proposed model.
- (ii)
- Through the construction of an appropriate Lyapunov function, we analyze the global stability of the system’s virus-free and virus-present equilibrium states.
- (iii)
- The model system is subjected to an optimal control analysis by incorporating two control efforts.
- (iv)
- We employ the Adams–Bashforth–Moulton predictor-corrector technique to obtain a numerical solution.
2. Preliminaries
3. Model Formulation
- Traditional integer-order differential equations typically consider only the system’s current state, without accounting for its prior states. In contrast, fractional differential equations incorporate fractional derivatives, enabling the model to capture historical behaviors and reflect memory effects.
- By introducing fractional derivatives, fractional differential equations allow greater flexibility, which facilitates the representation of more diverse phenomena and the modeling of systems across varying scales and complexities. For example, please refer to [37,38] and most of the reference cited therein.
- Fractional-order systems often exhibit more complex and varied dynamics, providing deeper insights into nonlinear behaviors such as chaos, bifurcation and oscillation. For instance, bifurcations are discussed comprehensively in [39].
- In certain real-world scenarios, integer-order differential equations might fail to adequately capture the dynamics of actual systems. Conversely, fractional-order differential equations offer a more precise representation, achieving a higher level of accuracy and explanatory capability. Studies [40,41] demonstrate that numerical simulations based on fractional-order models align more closely with observed phenomena.
- In the context of fractional differential equations, the control of the basic reproduction number is better than the classical integer-order model. This conclusion is corroborated by findings in [42].
4. Well-Posedness
4.1. Existence and Uniqueness of Solutions
4.2. Non-Negativity and Uniform Boundedness
5. Stability of the Equilibrium Points
5.1. Equilibria and Basic Reproduction Number
5.2. Local Stability
5.3. Global Stability
6. FOCP Formulation
- The set of control U and the corresponding set of state variables are not empty;
- U is closed and convex;
- The right-hand side of the system (9) is constrained by a linear function involving control and state variables;
- The integrand of the objective function is convex within the set U;
- There exist constants and such that the integrand satisfies
7. Numerical Results and Discussion
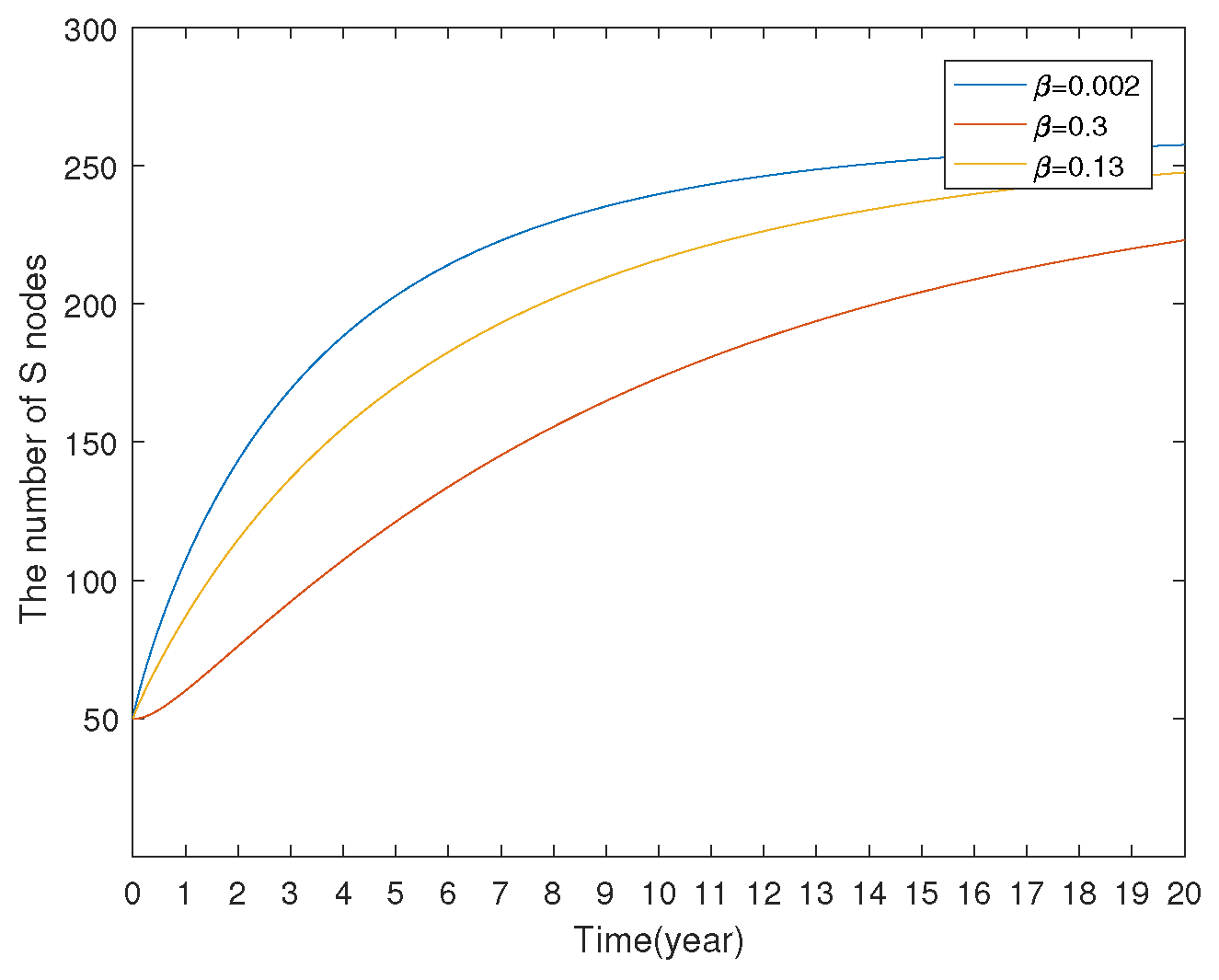
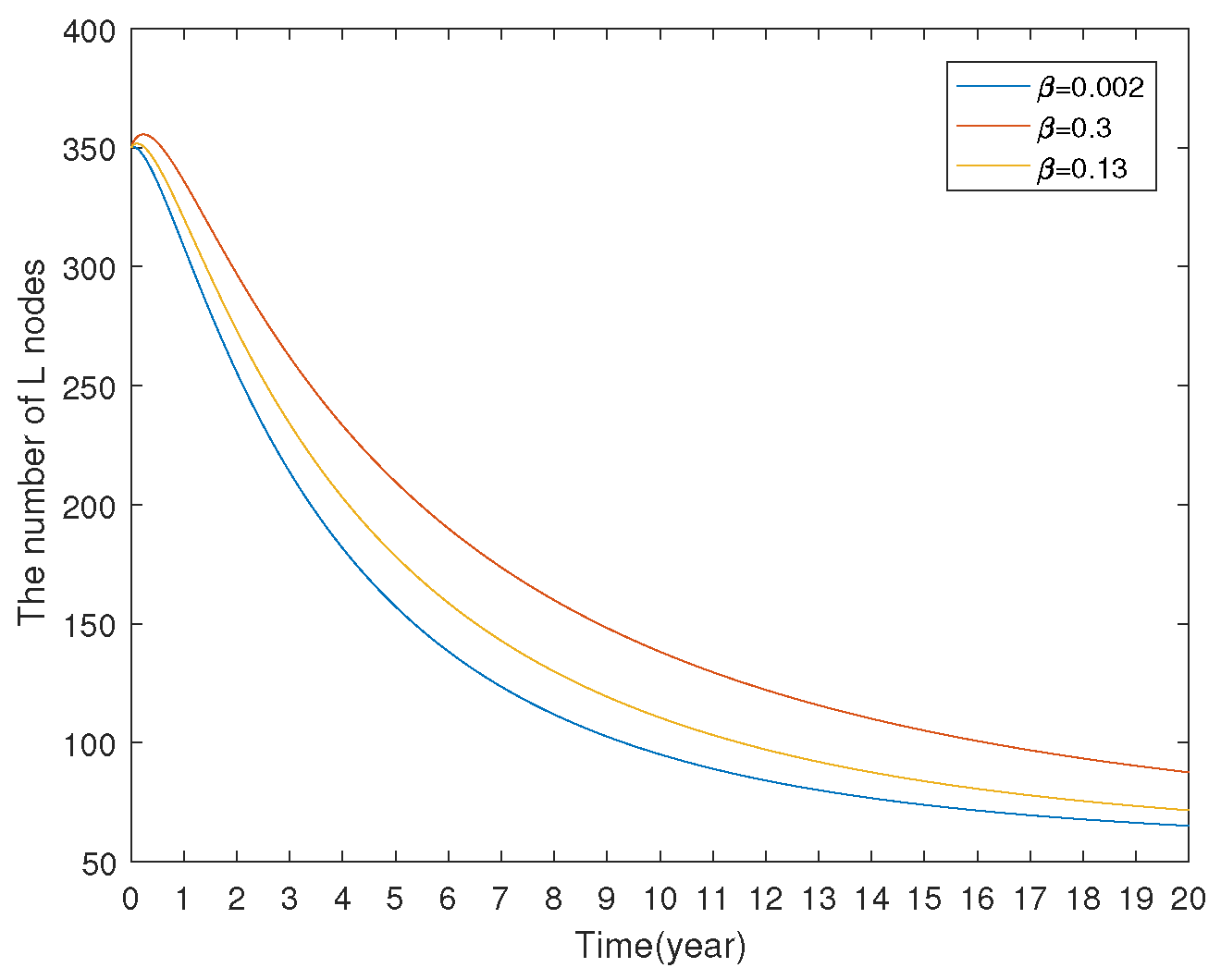
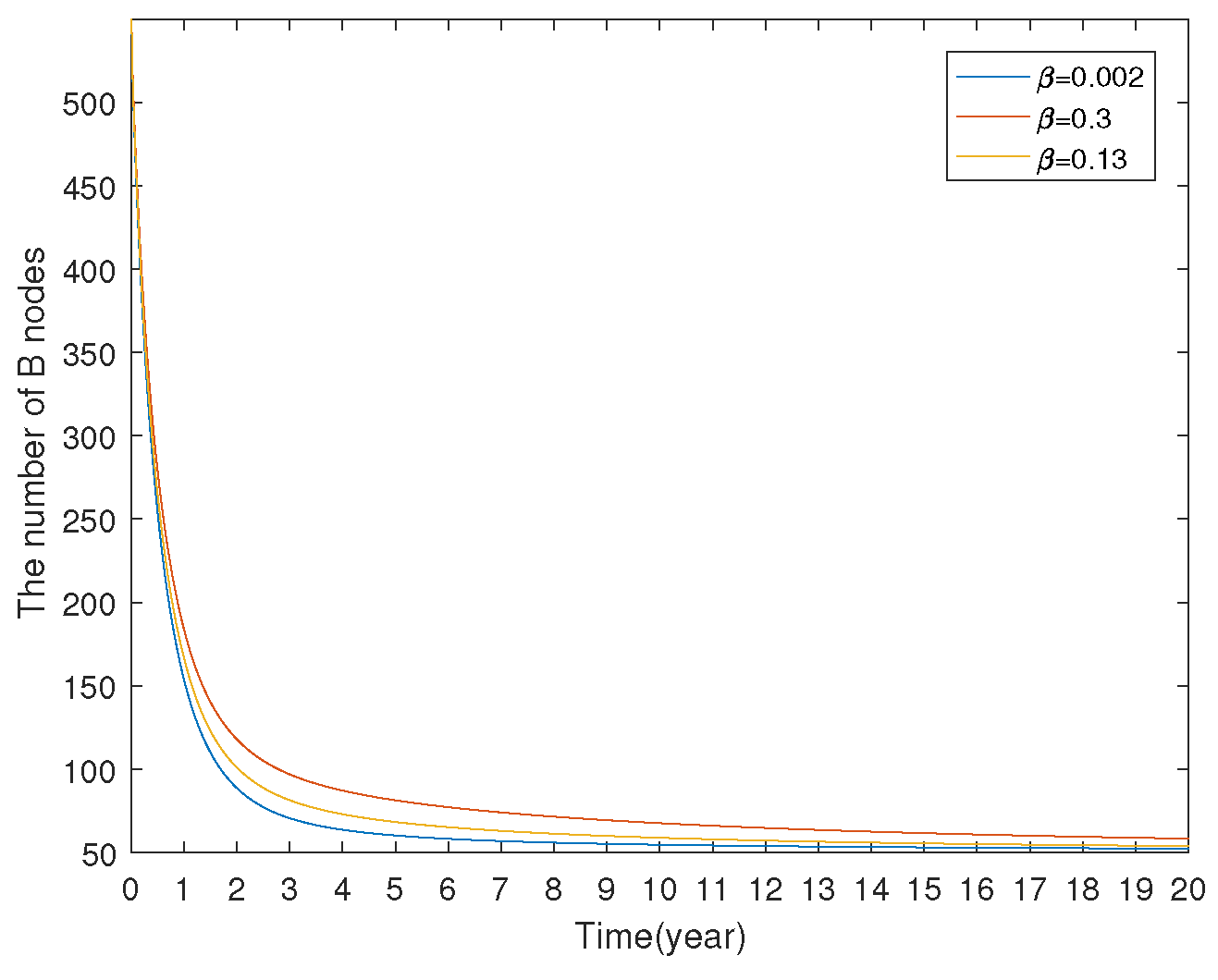
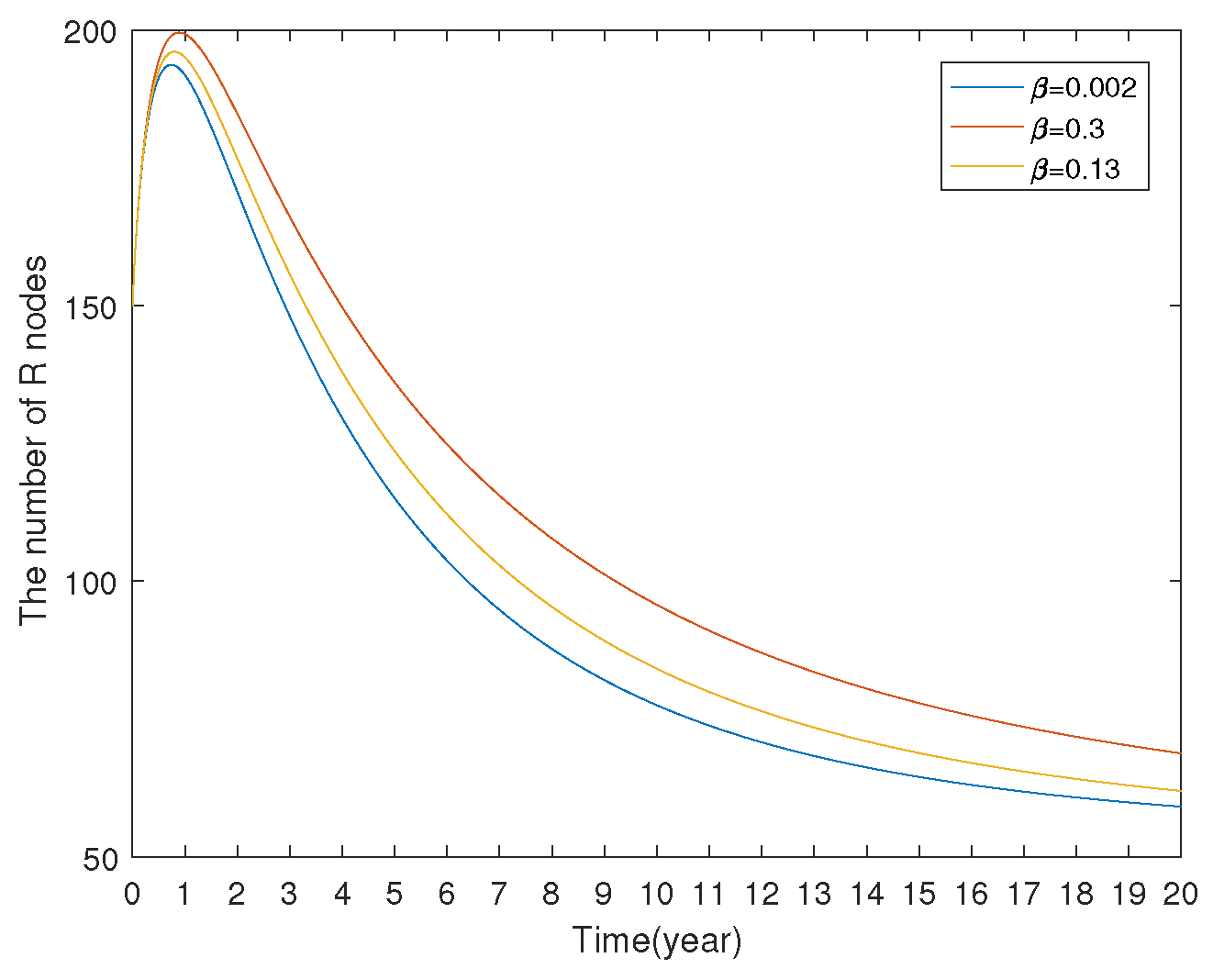
7.1. Numerical Results of Fractional SLBR Model
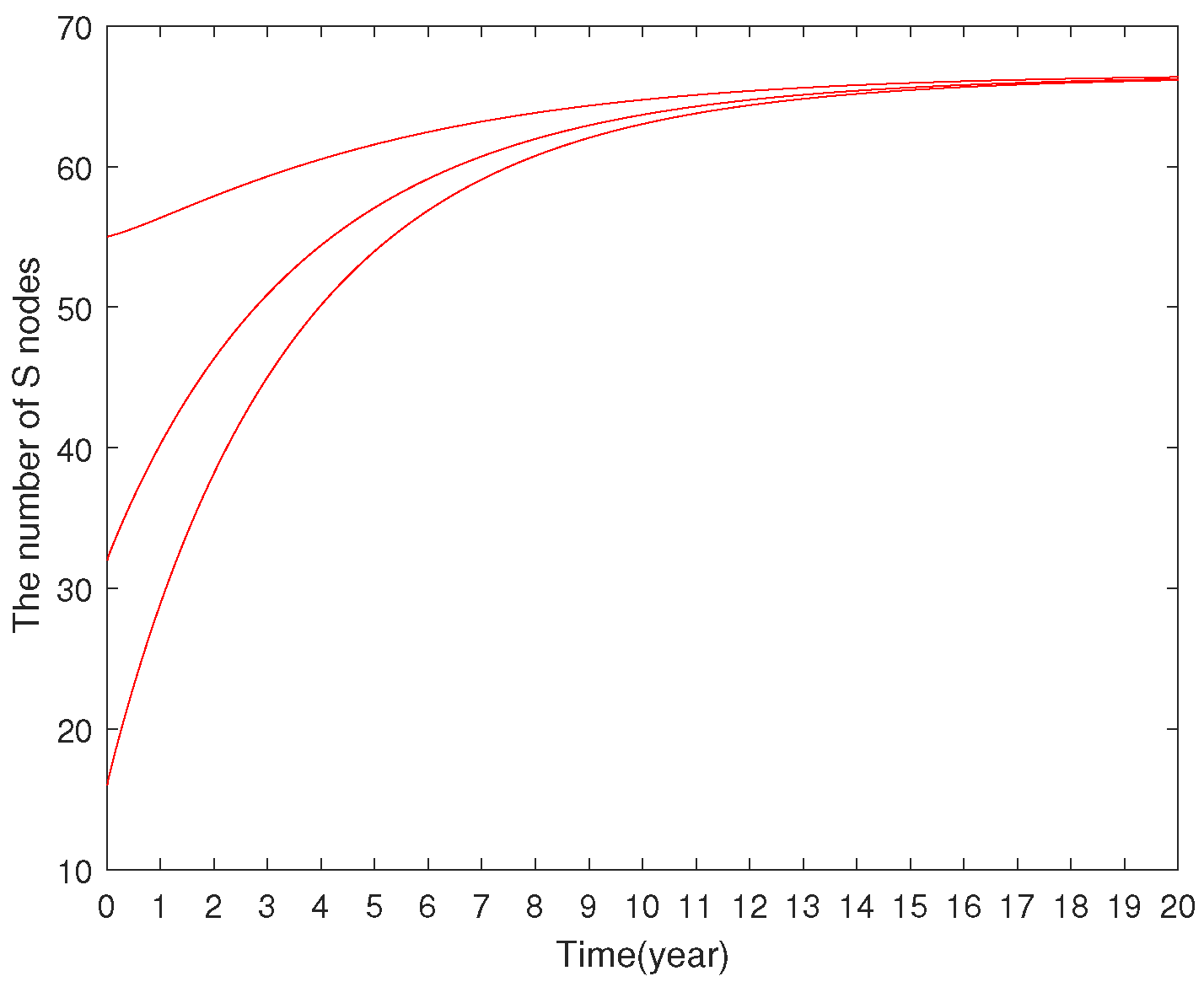
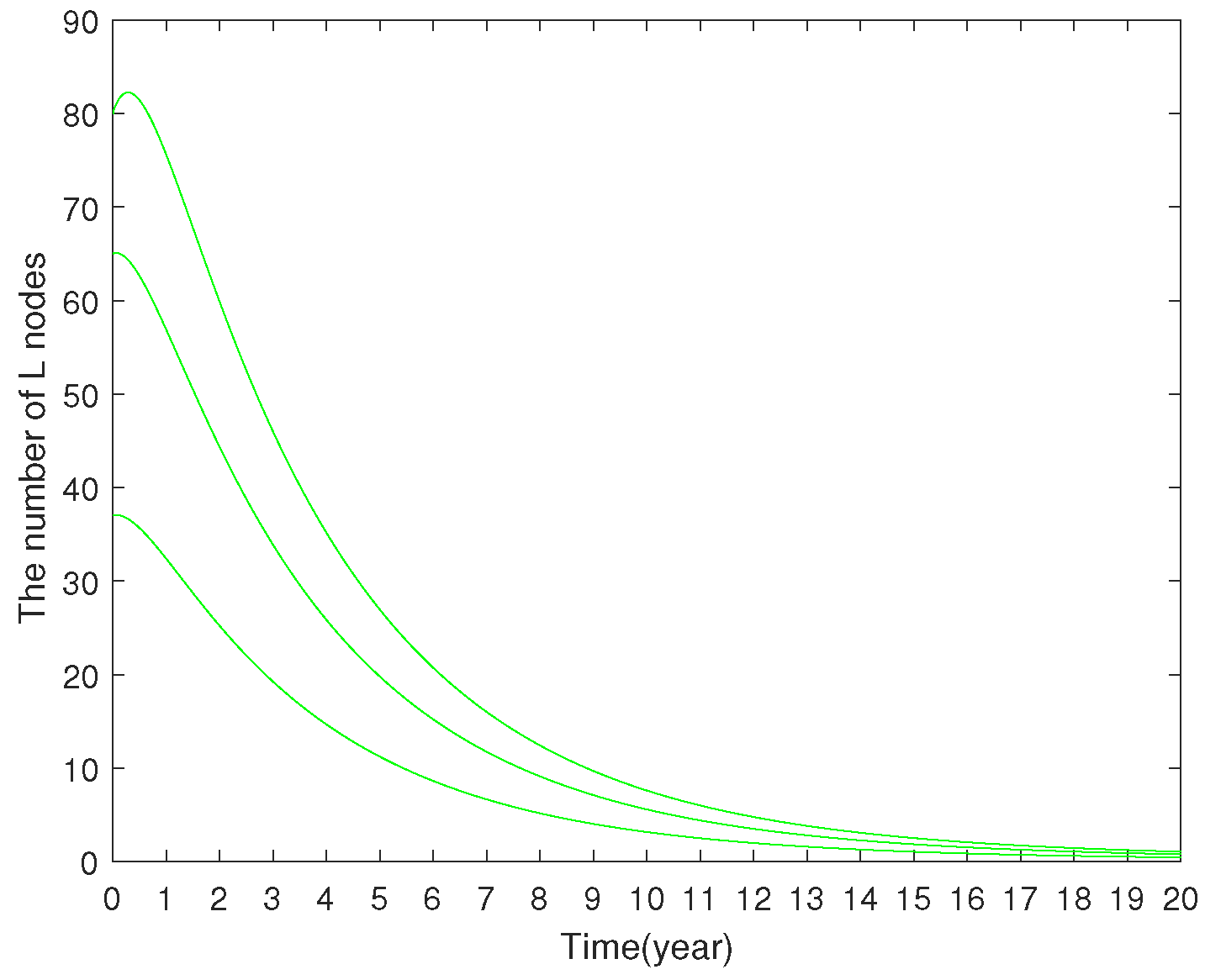
7.1.1. Stability Analysis of Virus-Free Equilibrium
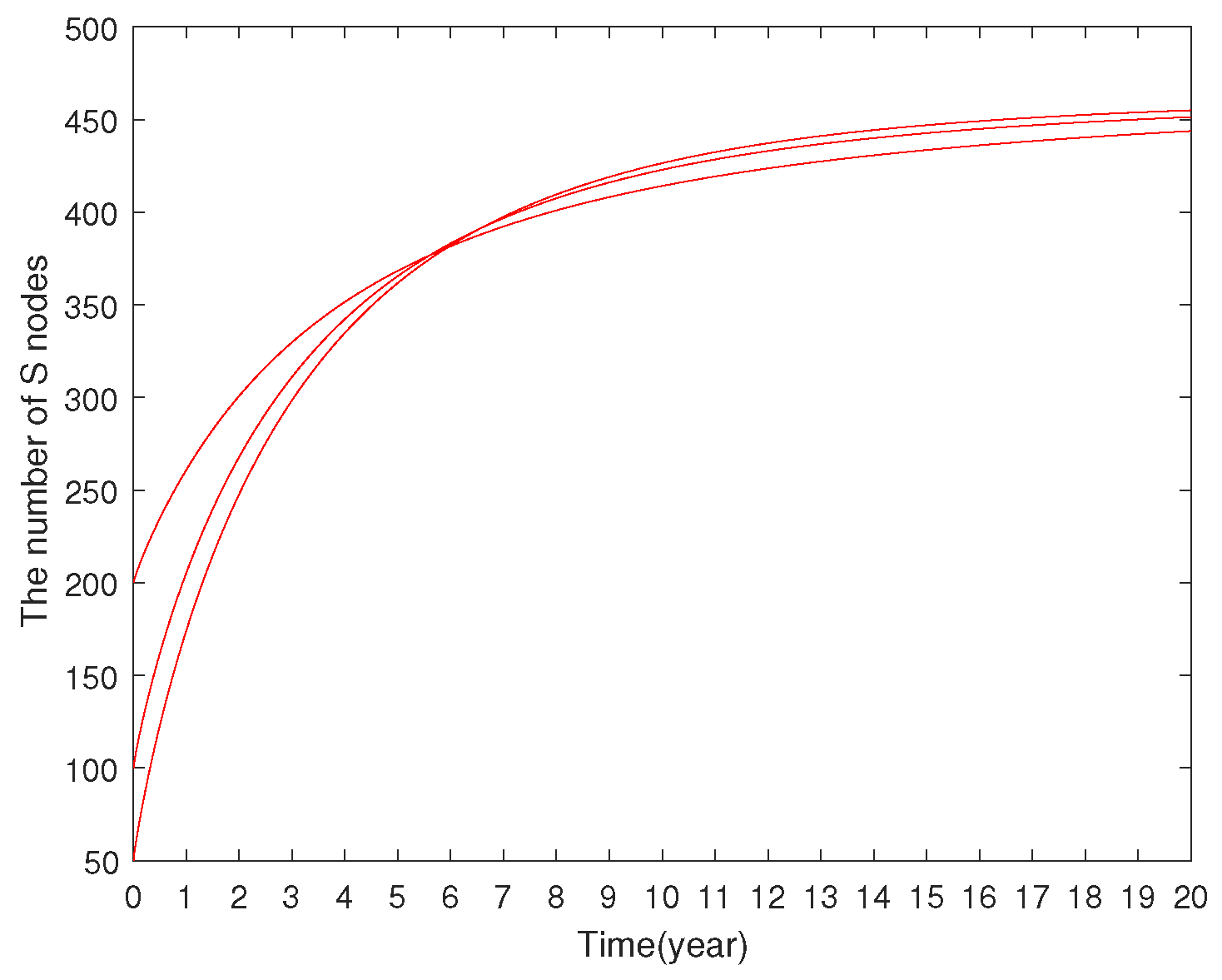
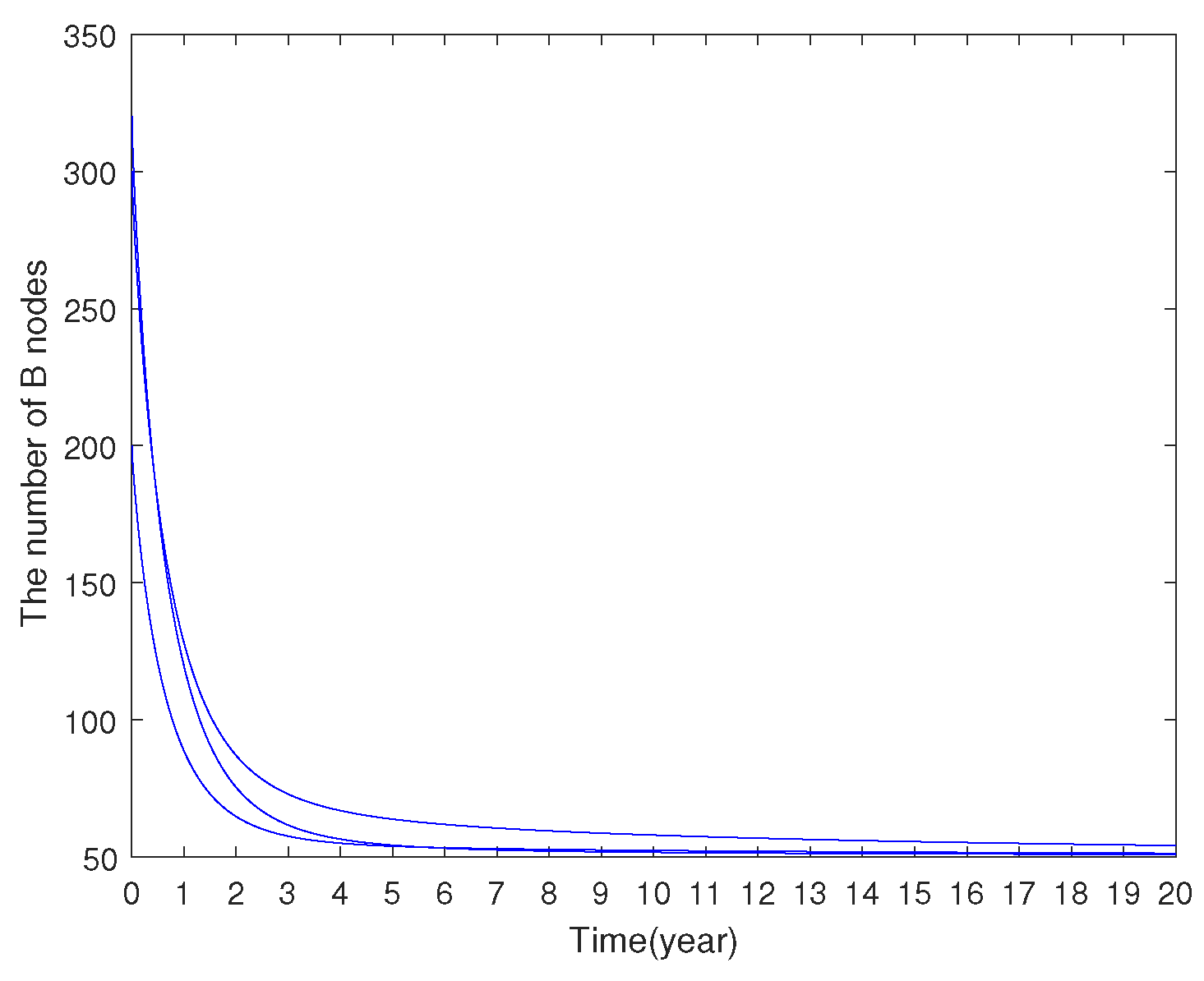
7.1.2. Stability Analysis of Virus-Present Equilibrium
7.1.3. Model Comparison
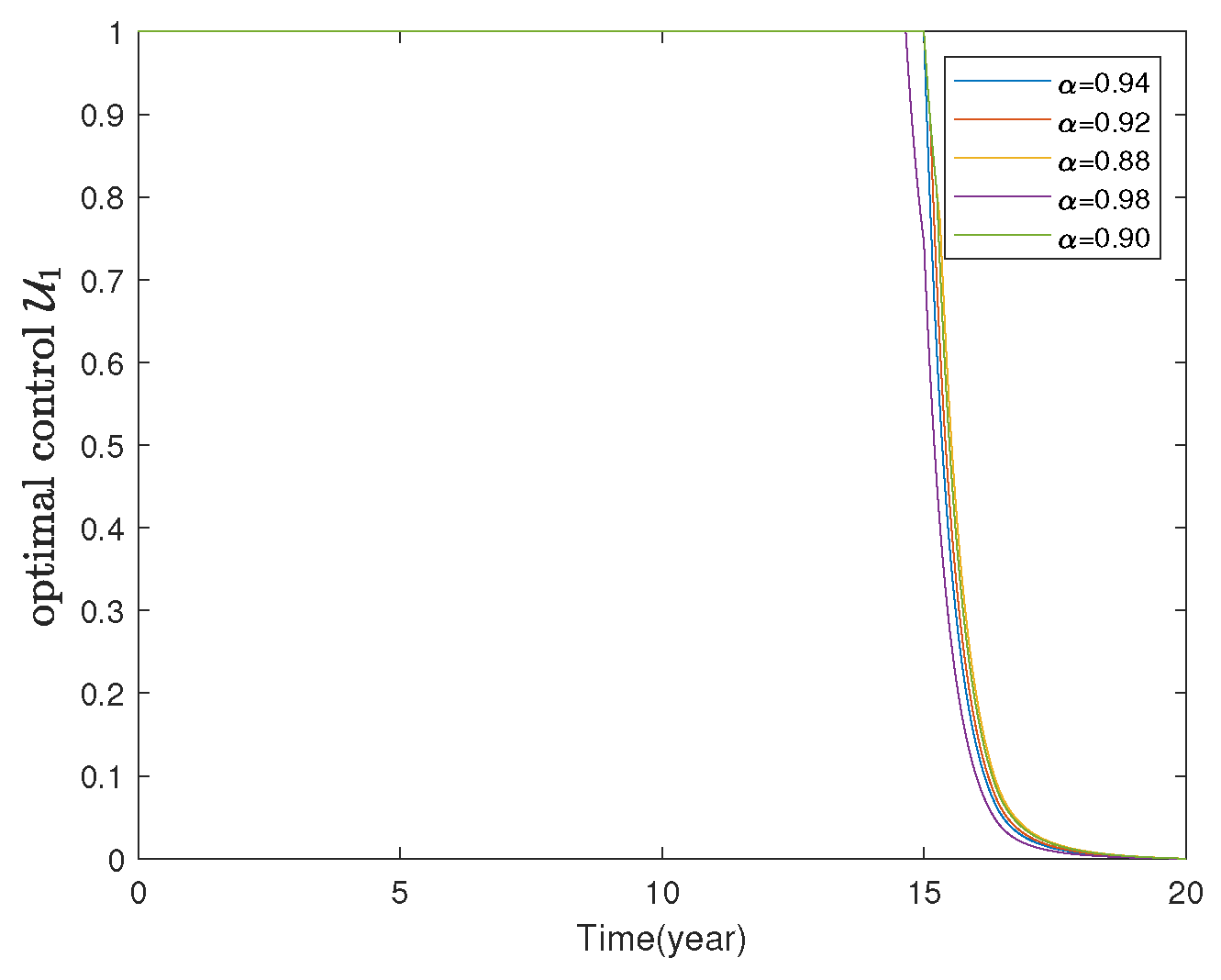
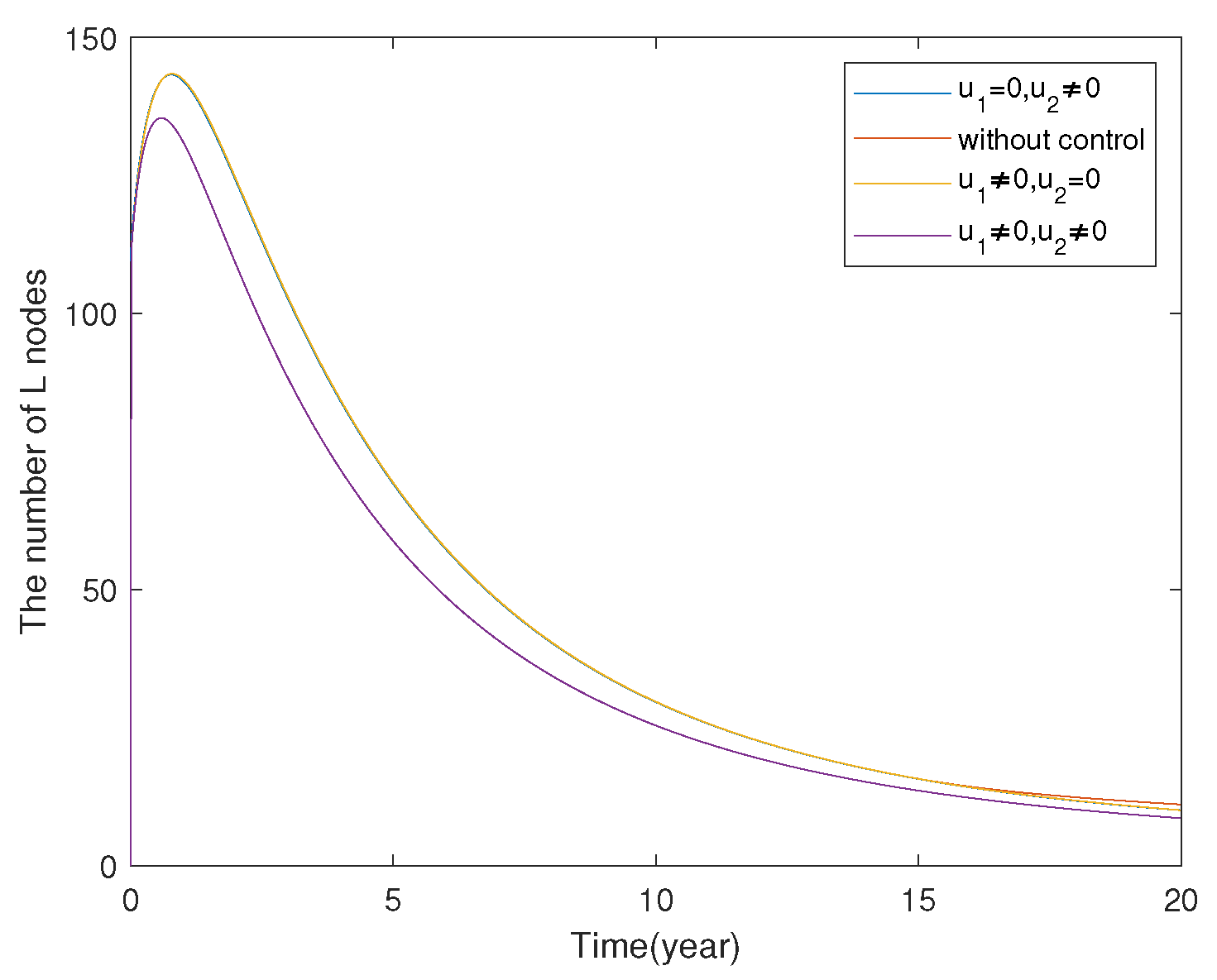
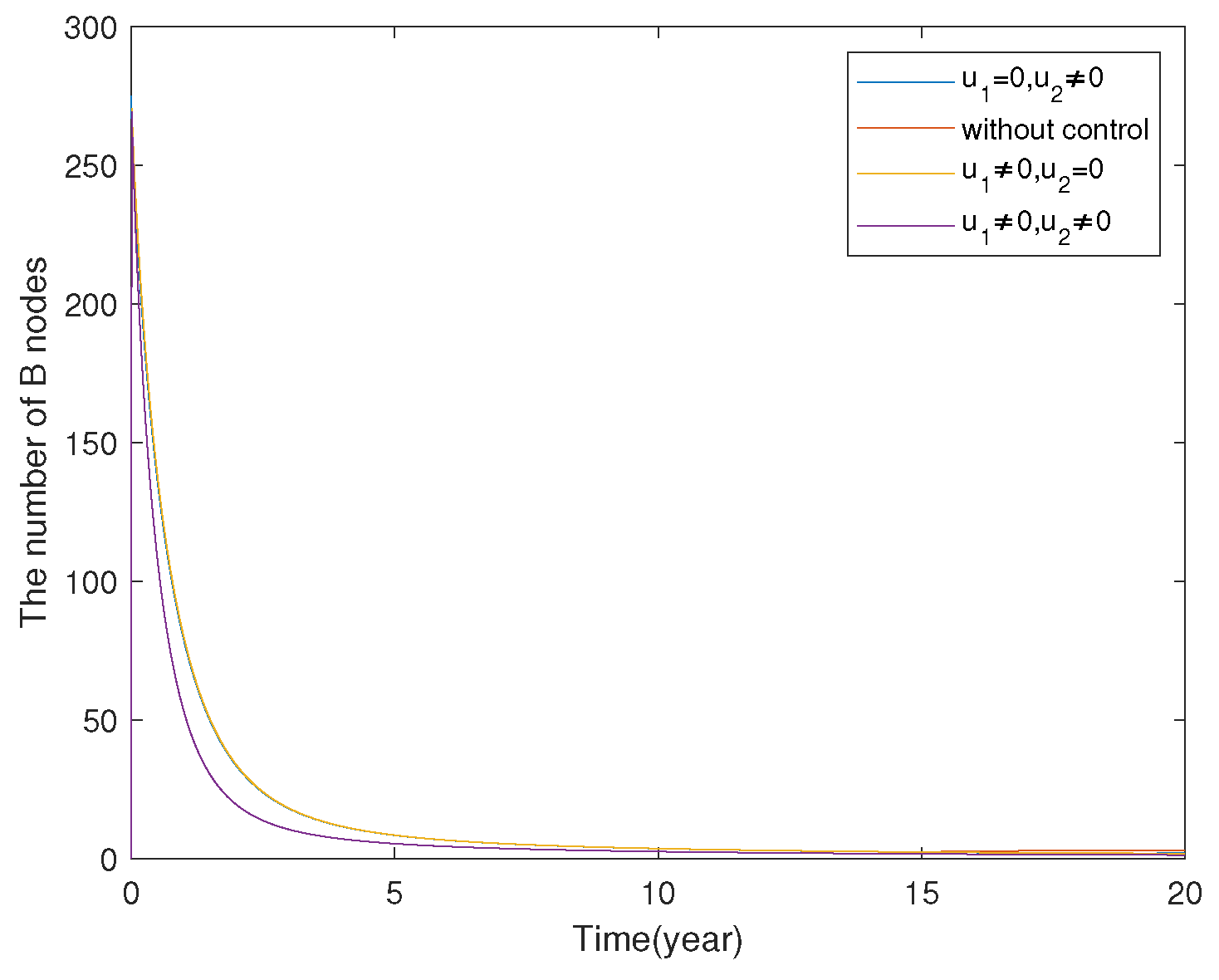
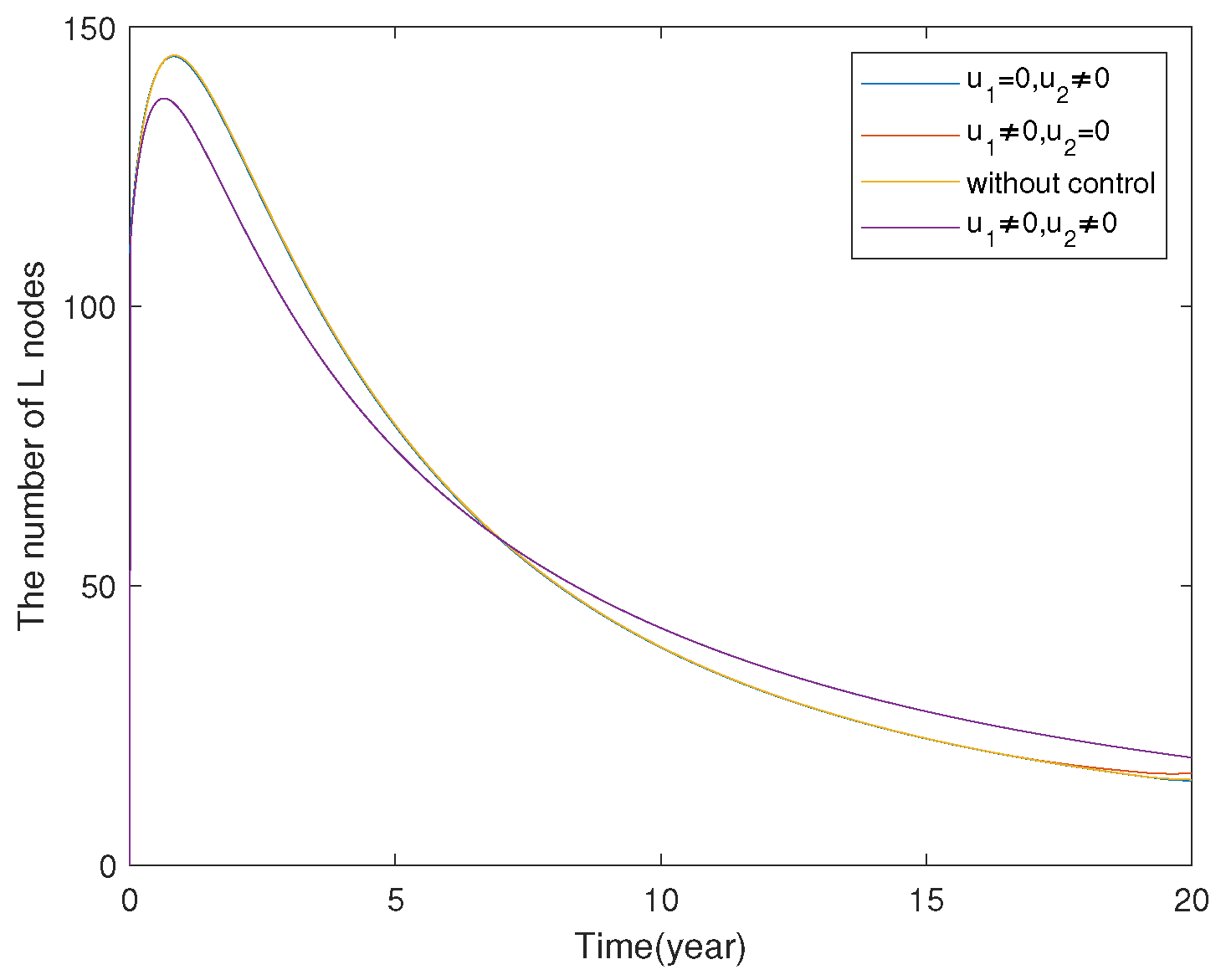
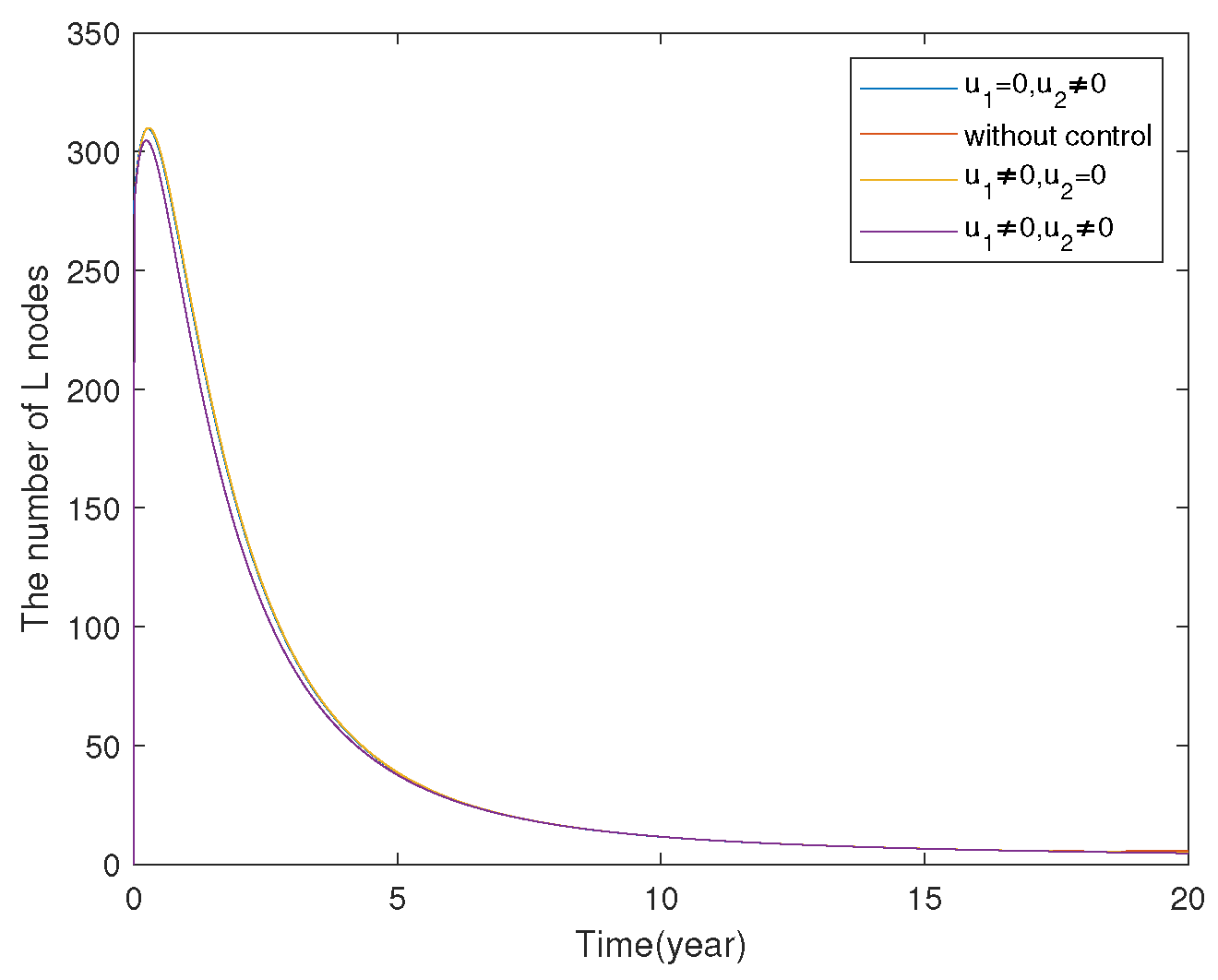
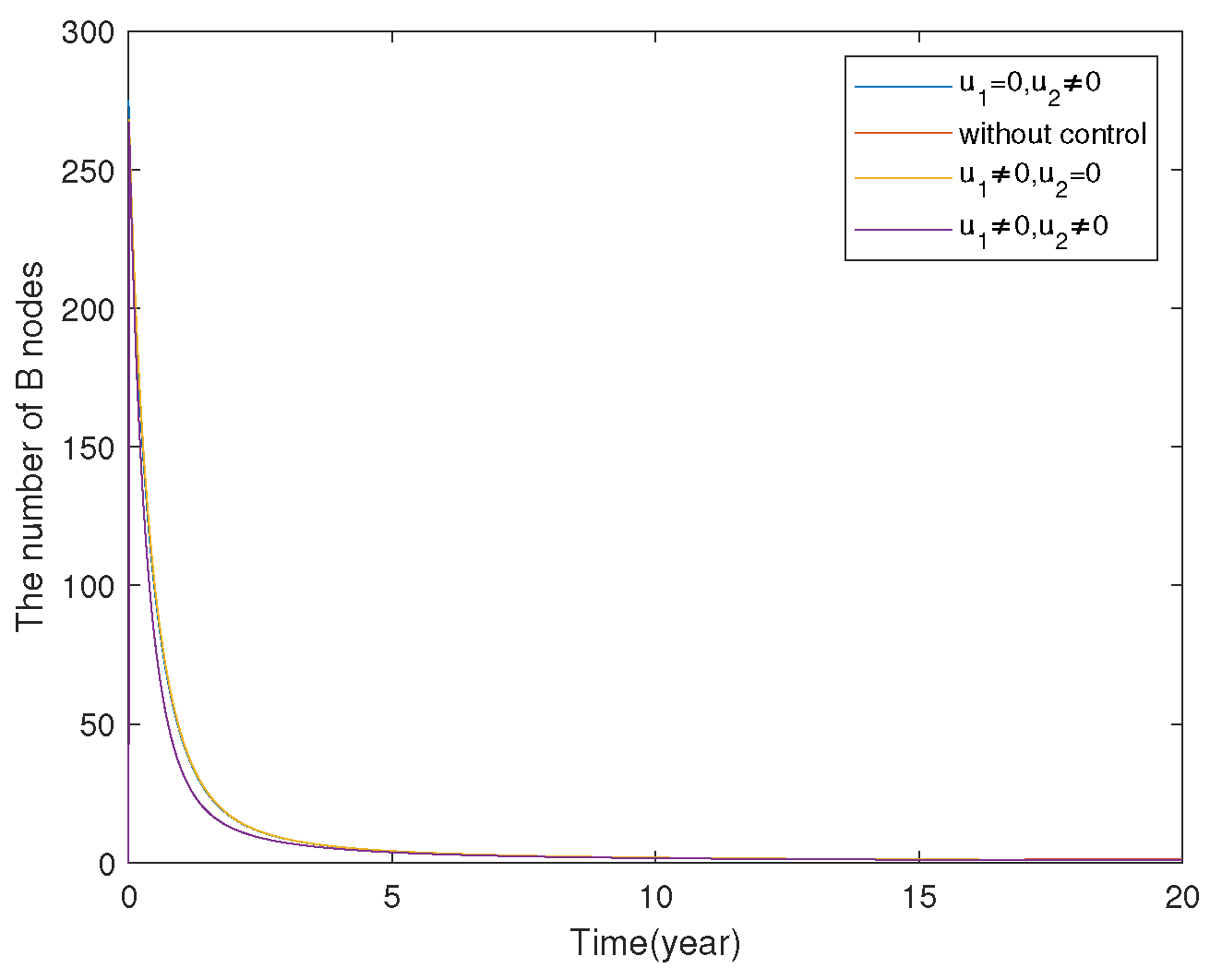
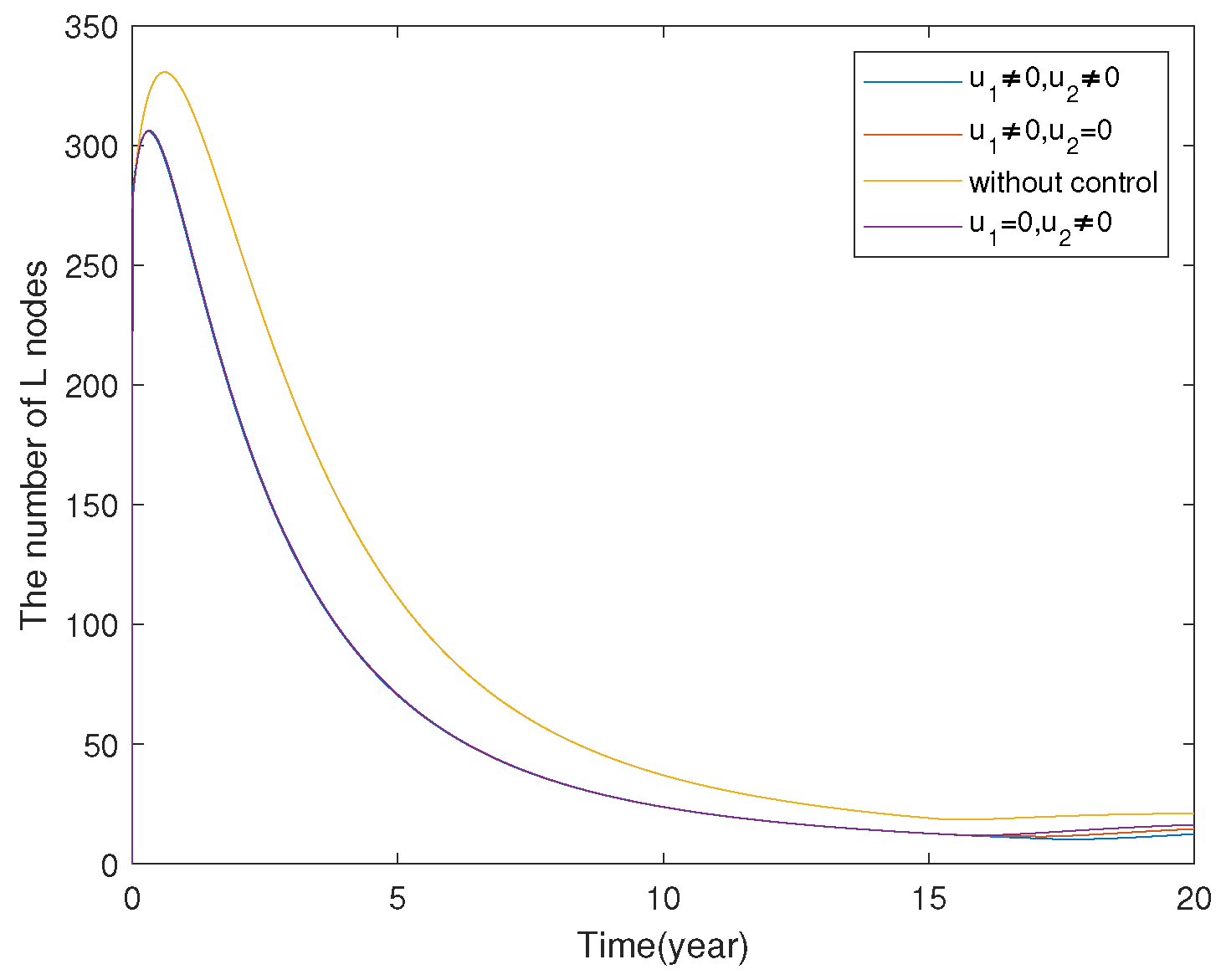
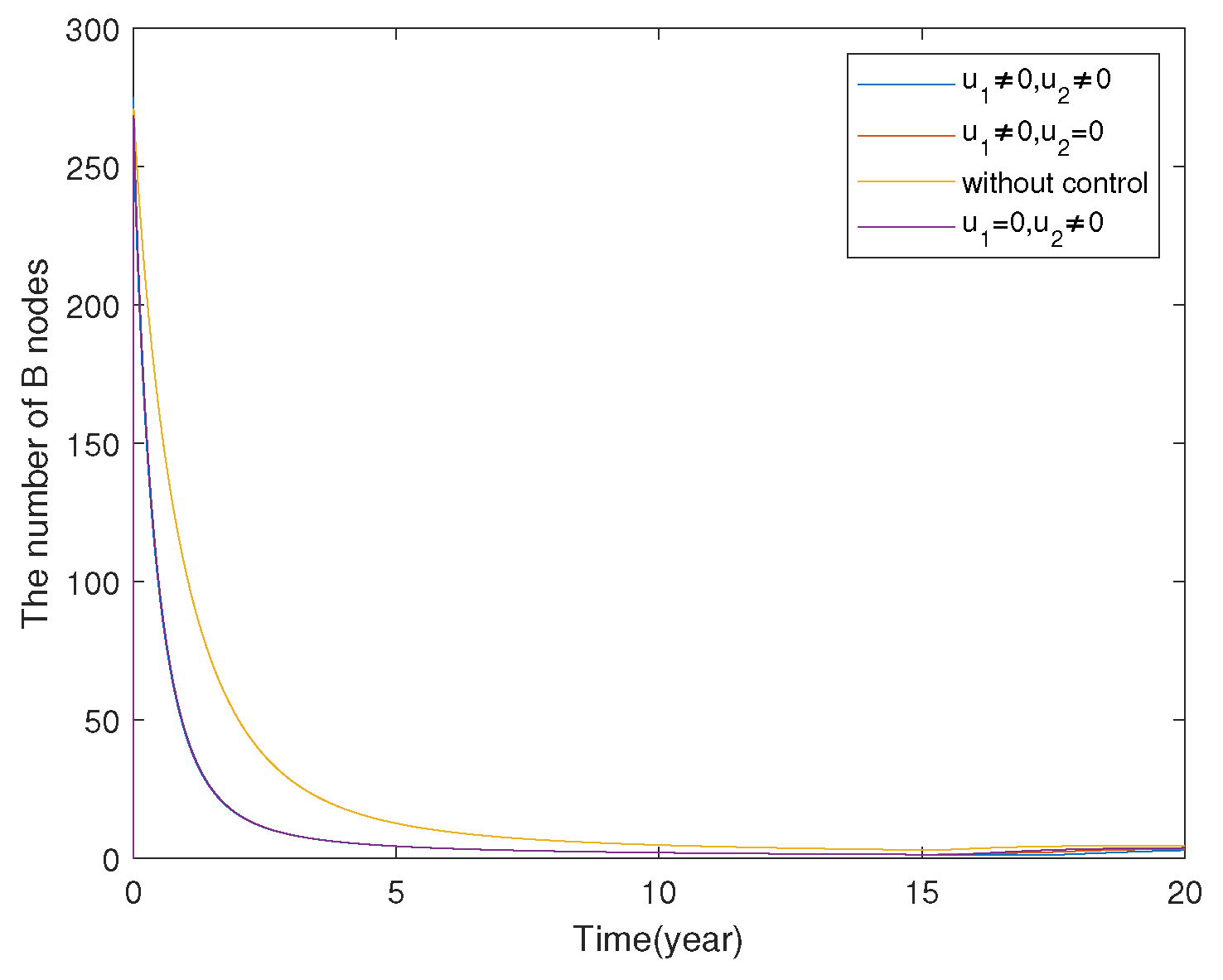
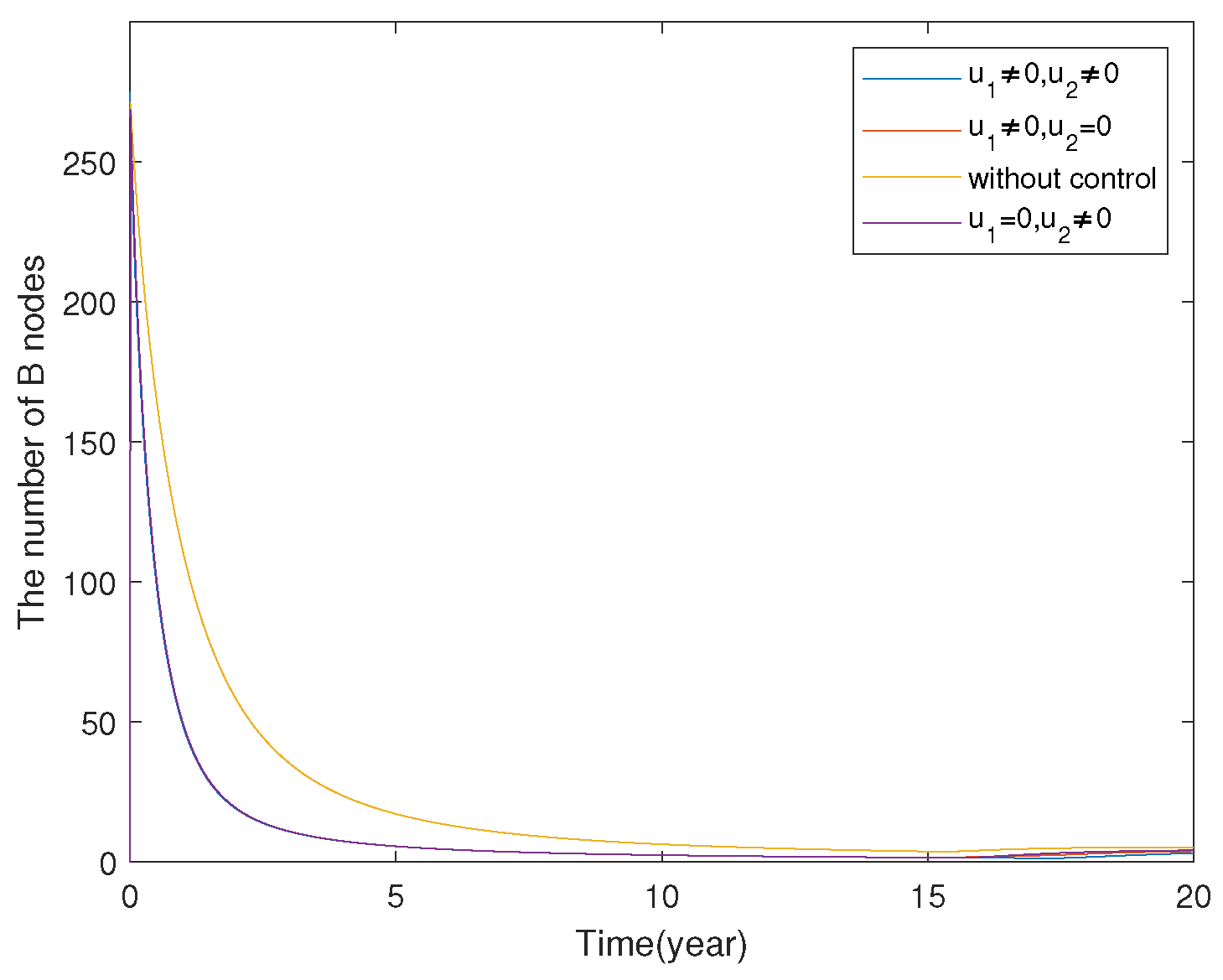
7.2. FOCP of SLBR Transmission
8. Conclusions
- Delay in infection: we plan to integrate time delay into the current model. When the anti-virus software is installed, the virus will be cleared. This clearance is modeled as the virus clearance gap delay . We will prove the existence and uniqueness of the solution, establish the boundedness of the solution, analyze the stability of the equilibrium points and the occurrence of Hopf bifurcation and, finally, perform numerical simulations to explore the dynamic behavior of the model.
- Backward bifurcation: examines the phenomenon of “reversal” or “backward transition” during the shift from a stable state to an unstable state. In certain situations, computer viruses do not entirely vanish but instead reach a stable endogenous state. Research on backward bifurcation plays a critical role in shaping effective prevention and control strategies.
- Focus on the incidence rate: explore its generalized form. The spread of many viruses demonstrates nonlinear dynamics. By extending the infection rate to a generalized incidence rate, we can more accurately simulate these complex patterns and adapt the model to a broader spectrum of real-world situations.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pliatsios, D.; Sarigiannidis, P.; Lagkas, T. A survey on SCADA systems: Secure protocols, incidents, threats, and tractics. IEEE Commun. Surv. Tutor. 2020, 22, 1942–1976. [Google Scholar] [CrossRef]
- Ajmal, A.B.; Alam, M.; Khaliq, A.A.; Khan, S.; Qadir, Z.; Mahmud, M.A.P. Last line of defence: Reliability through inducing cyber threat hunting with deception in SCADA networks. IEEE Access 2021, 9, 126789–126800. [Google Scholar] [CrossRef]
- Masood, Z.; Raja, M.A.Z.; Chaudhary, N.I.; Cheema, K.M.; Milyani, A.H. Fractional dynamics of Stuxnet virus propagation in industrial control systems. Mathematics 2021, 9, 2160. [Google Scholar] [CrossRef]
- Kephart, J.O.; White, S.R. Directed-graph epidemiological models of computer virus. In Proceedings of the 1991 IEEE Computer Society Symposium on Research in Security and Privacy, Oakland, CA, USA, 20–22 May 1991; pp. 343–359. [Google Scholar]
- Zhu, Q.; Zhang, G.; Luo, X.; Gan, C. An industrial virus-propagation model based on SCADA system. Inform. Sci. 2023, 630, 546–566. [Google Scholar] [CrossRef]
- Sheng, C.; Yao, Y.; Fu, Q.; Yang, W.; Liu, Y. A cyber-physical model for SCADA system and its intrusion detection. Comput. Netw. 2020, 185, 37. [Google Scholar] [CrossRef]
- Wu, G.; Zhang, Y.; Zhang, H.; Yu, S.; Shen, S. SIHQR model with time delay for worm spread analysis in IIoT-enabled PLC network 2024. Ad Hoc Netw. 2024, 160, 103504. [Google Scholar] [CrossRef]
- Thirthar, A.A.; Abboubakar, H.; Alaoui, A.L.; Nisar, K.S. Dynamical behavior of a fractional-order epidemic model for investigating two fear effect functions. Results. Control. Optm 2024, 16, 100474. [Google Scholar] [CrossRef]
- Avazzadeh, Z.; Nikan, O.; Nguyen, A.T.; Nguyen, V.T. A localized hybrid kernel meshless technique for solving the fractional Rayleigh–Stokes problem for an edge in a viscoelastic fluid. Eng. Anal. Bound. Elem. 2023, 146, 695–705. [Google Scholar] [CrossRef]
- Murugesan, M.; Santra, S.S.; Jayanathan, L.A.; Baleanu, D. Numerical analysis of fractional order discrete Bloch equations. J. Math. Comput. Sci. 2024, 32, 222–228. [Google Scholar] [CrossRef]
- Alqahtani, Z.; Almuneef, A.; DarAssi, M.H. Mathematical analysis of fractional Chlamydia pandemic model. Sci. Rep. 2024, 14, 31113. [Google Scholar] [CrossRef]
- Padisak, J. Seasonal succession of phytoplankton in a large shallow lake(Balaton, Hungary)-a dynamic approach to ecological memory, its possible role and mechanisms. J. Ecol. 1992, 80, 217–230. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Petráš, I. Fractional-Order Nonlinear Systems: Modeling, Analysis and Simulation; Springer: Berlin, Germany; Higher Education Press: Beijing, China, 2011. [Google Scholar]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamics systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef]
- dos Santos, J.P.C.; Monteiro, E.; Vieira, G.B. Global stability of fractional SIR epidemic model. Proc. Ser. Braz. Soc. Appl. Comput. Math. 2017, 5, 1–7. [Google Scholar]
- Kheiri, H.; Jafari, M. Optimal control of a fractional-order model for the HIV/AIDS epidemic. Int. J. Biomath. 2018, 6, 1850086. [Google Scholar] [CrossRef]
- Sadek, L.; Baleanu, D.; Abdo, M.S.; Shatanawi, W. Introducing novel Θ-fractional operators: Advances in fractional calculus. J. King. Saud. Univ. Sci 2024, 36, 103352. [Google Scholar] [CrossRef]
- Diethelm, K. The Anaysis of Fractional Differential Equations: An Application-Oriented Exposition Using Operators of Caputo Type; Lecture Notes in Mathematics; Springer: Berlin, Germany, 2004. [Google Scholar]
- Heinz, S.; Ledzewicz, U. Geometric Optimal Control: Theory, Methods and Examples; Springer: Berlin, Germany, 2012. [Google Scholar]
- You, J.; Li, Y.; Cao, X.; Zhao, D.; Chen, Y.; Zhang, C. Optimal Control of Nonlinear Competitive Epidemic Spreading Processes With Memory in Heterogeneous Networks. IEEE Trans. Netw. Sci. Eng. 2024, 12, 96–109. [Google Scholar] [CrossRef]
- Ali, H.M.; Pereira, F.L.; Gama, S.M.A. A new approach to the Pontryagin maximum principle for nonlinear fractional optimal control problem. Math. Meth. Appl. Sci. 2016, 39, 3640–3649. [Google Scholar] [CrossRef]
- Ali, H.M. Necessary Conditions for Constrained Nonsmooth Fractional Optimal Control Problems. Ph.D. Thesis, University of Porto, Porto, Portugal, 2016. [Google Scholar]
- Ali, H.M.; Ameen, I. Save the pine forests of wilt disease using a fractional optimal control strategy. Chaos Soliton Fract. 2020, 132, 109554. [Google Scholar] [CrossRef]
- Vellappandi, M.; Kumar, P.; Govindaraj, V.; Albalawi, W. An optimal control problem for mosaic disease via Caputo fractional derivative. Alex. Eng. J. 2022, 61, 8027–8037. [Google Scholar] [CrossRef]
- Ali, H.M.; Ameen, I. Optimal control strategies of a fractional-order model for Zika virus infection involving various transmissions. Chaos Soliton Fract. 2021, 146, 110864. [Google Scholar] [CrossRef]
- Sweilam, N.H.; Al-Mekhlafi, S.M.; Albalawi, A.O. Optimal control for a fractional order malaria transmission dynamics mathematical model. Alex. Eng. J. 2020, 59, 1677–1692. [Google Scholar] [CrossRef]
- Berhe, H.W.; Gebremeskel, A.A.; Melese, Z.T.; Al-arydah, M.T.; Gebremichael, A.A. Modeling and global stability analysis of COVID-19 dynamics with optimal control and cost-effectiveness analysis. Partial. Differ. Equ. Appl. Math. 2024, 11, 100843. [Google Scholar] [CrossRef]
- Liu, G.; Tan, Z.; Liang, Z.; Chen, H.; Zhong, X. Fractional Optimal Control for Malware Propagation in Internet of Underwater Things. IEEE Internet Things 2024, 11, 11632–11651. [Google Scholar] [CrossRef]
- La Salle, J.; Lefschetz, S. Stability by Liapunov’s Direct Method; Academic Press: New York, NY, USA, 1961. [Google Scholar]
- Lyapunov, A.M. The general problem of the stability of motion. Int. J. Control 1992, 55, 531–534. [Google Scholar] [CrossRef]
- Ameen, I.; Baleanu, D.; Ali, H.M. An efficient algorithm for solving the fractional optimal control of SIRV epidemic model with a combination of vaccination and treatment. Chaos Soliton Fract. 2020, 137, 109892. [Google Scholar] [CrossRef]
- Ameen, I.; Hidan, M.; Mostefaoui, Z.; Ali, H.M. Fractional optimal control with fish consumption to prevent the risk of coronary heart disease. Complexity 2020, 2020, 9823753. [Google Scholar] [CrossRef]
- Vargas-De-León, C. Volterra-type Lyapunov functions for fractional-order epidemic systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 24, 75–85. [Google Scholar] [CrossRef]
- Huo, J.; Zhao, H.; Zhu, L. The effect of vaccines on backward bifurcation in a fractional order HIV model. Nonlinear Anal. Real World Appl. 2015, 26, 289–305. [Google Scholar] [CrossRef]
- Niu, W.; Fan, M. Control and Research of Computer Virus by Multimedia Technology. Int. J. Inf. Syst. Suppl. 2024, 17, 333896. [Google Scholar] [CrossRef]
- Diethelm, K. A fractional calculus based model for the simulation of an outbreak of dengue fever. Nonlinear. Dynam 2013, 71, 613–619. [Google Scholar] [CrossRef]
- Anh Triet, N.; Van Au, V.; Dinh Long, L.; Baleanu, D.; Huy Tuan, N. Regularization of a terminal value problem for time fractional diffusion equation. Math. Method. Appl. Sci. 2020, 43, 3850–3878. [Google Scholar] [CrossRef]
- Yang, L.; Song, Q.; Liu, Y. Dynamics analysis of a new fractional-order SVEIR-KS model for computer virus propagation: Stability and Hopf bifurcation. Neurocomputing 2024, 598, 128075. [Google Scholar] [CrossRef]
- Baleanu, D.; Mohammadi, H.; Rezapour, S. A mathematical theoretical study of a particular system of Caputo–Fabrizio fractional differential equations for the Rubella disease model. Adv. Differ. Equ. 2020, 2020, 184. [Google Scholar] [CrossRef]
- Qureshi, S. Real life application of Caputo fractional derivative for measles epidemiological autonomous dynamical system. Chaos Soliton Fract. 2020, 134, 109744. [Google Scholar] [CrossRef]
- Ahmed, N.; Wei, Z.; Baleanu, D.; Rafiq, M.; Rehman, M.A. Spatio-temporal numerical modeling of reaction-diffusion measles epidemic system. J. Nonlinear. Sci. 2019, 29, 103101. [Google Scholar] [CrossRef] [PubMed]
- Odibat, Z.M.; Shawagfeh, N.T. Generalized Taylor’s formula. Appl. Math. Comput. 2007, 186, 286–293. [Google Scholar] [CrossRef]
- Li, H.; Zhang, L.; Hu, C.; Jiang, Y.; Teng, Z. Dynamical analysis of a fractional-order prey-predator model incorporating a prey refuge. J. Appl. Math. Comput. 2017, 54, 435–439. [Google Scholar] [CrossRef]
- Driessche, P.V.D.; Watmough, J. Further notes on the basic reproduction number. Math. Epidemiol. 2008, 6, 159–178. [Google Scholar]
- Lukre, D.L. Differential equations: Classical to controlled. Am. Math. Mon. 1982, 55, 531–534. [Google Scholar]
- Diethelm, K.; Ford, N.J.; Freed, A.D. A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29, 3–22. [Google Scholar] [CrossRef]
- Garrappa, R. On linear stability of predicor-corrector algorithms for fractional differential equations. Int. J. Comput. Math. 2010, 87, 2281–2290. [Google Scholar] [CrossRef]
- Rosa, S.; Torres, D.F.M. Numerical Fractional Optimal Control of Respiratory Syncytial Virus Infection in Octave/MATLAB. Mathematics 2023, 11, 1511. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Gao, D.; Feng, S.; Li, J. Stability and Optimal Control Analysis for a Fractional-Order Industrial Virus-Propagation Model Based on SCADA System. Mathematics 2025, 13, 1338. https://doi.org/10.3390/math13081338
Huang L, Gao D, Feng S, Li J. Stability and Optimal Control Analysis for a Fractional-Order Industrial Virus-Propagation Model Based on SCADA System. Mathematics. 2025; 13(8):1338. https://doi.org/10.3390/math13081338
Chicago/Turabian StyleHuang, Luping, Dapeng Gao, Shiqiang Feng, and Jindong Li. 2025. "Stability and Optimal Control Analysis for a Fractional-Order Industrial Virus-Propagation Model Based on SCADA System" Mathematics 13, no. 8: 1338. https://doi.org/10.3390/math13081338
APA StyleHuang, L., Gao, D., Feng, S., & Li, J. (2025). Stability and Optimal Control Analysis for a Fractional-Order Industrial Virus-Propagation Model Based on SCADA System. Mathematics, 13(8), 1338. https://doi.org/10.3390/math13081338