1. Introduction
Curves, which are the basic objects of study, have attracted much attention from many mathematicians and physicists [
1,
2,
3]. Due to the need to observe the properties of special curves, a renewed interest in curves has developed, such as rectifying curves in different spaces. The space curves whose position vectors always lie in their rectifying planes are called rectifying curves. B.Y. Chen gave the notion of rectifying curves in [
4]. In [
5], the relationship between centrodes of space curves and rectifying curves was revealed by F. Dillen and B.Y. Chen. In kinematics, the centrode is the path traced by the instantaneous center of rotation of a rigid plane figure moving in a plane, and it has wide applications in mechanics and joint kinematics (see [
6,
7,
8,
9]).
Since B.Y. Chen’s important work, the notion of rectifying curves was extended to other ambient spaces [
10,
11,
12,
13]. As we know, regular curves determine the curvature functions and torsion functions, which can provide valuable geometric information about the curves by the Frenet frames of the original curves. If space curves have singular points, the Frenet frames of these curves cannot be constructed. However, S. Honda and M. Takahashi [
14] gave the definition of framed curves. Framed curves are space curves with moving frames, and they may have singular points. They are the generalizations of not only Legendrian curves in unit tangent bundles, but also regular curves with linear independent conditions (see [
15]).
Inspired by the above work, in order to investigate the properties of rectifying curves with singular points, we should give the concept of framed rectifying curves. The difficulties arise because tangent vectors vanish at singular points, so it is impossible to normalize tangent vectors, principal normal vectors, and binormal vectors in the usual way. Here, we define the generalized tangent vector, the generalized principle normal vector, and the generalized binormal vector, respectively. Actually, at regular points, they are just the usual tangent vector, principle vector, and binormal vector. We obtain moving adapted frames for framed rectifying curves, and some smooth functions similar to the curvature of regular curves are defined by using moving adapted frames. These functions are referred to as framed curvature, which is very useful to analyze framed rectifying curves. On this basis, we investigate the properties of framed rectifying curves and give some sufficient and necessary conditions for the judgment of framed rectifying curves. Moreover, we give a method for constructing framed rectifying curves. In this paper, framed helices are also defined. We discuss the relationship between framed rectifying curves and framed helices in terms of the ratio of framed curvature. In particular, the ratio of framed curvature for framed rectifying curves has extrema at singular points. In addition, we give the notions of the centrodes of the framed curves and circular rectifying curves and reveal the relationships between framed rectifying curves and these special curves.
The organization of this paper is as follows. We review the concept of the framed curve and define an adapted frame and framed curvature for the framed curve in
Section 2. We provide some sufficient and necessary conditions for the judgment of framed rectifying curves in
Section 3. An important result, which explicitly determines all framed rectifying curves, is given in
Section 4. Moreover, the relationships between framed rectifying curves and framed helices and framed rectifying curves and centrodes are given in
Section 5 and
Section 6, respectively. At last, we consider the contact between framed rectifying curves and model curves (circular rectifying curves) in
Section 7.
2. Framed Curve and Adapted Frame
Let
be the three-dimensional Euclidean space, and let
be a curve with singular points. In order to investigate this curve, we will introduce the framed curve (cf., [
14]). We denote the set
as follows:
Then, is a three-dimensional smooth manifold. Let We define a unit vector in This means that is orthogonal to and
Definition 1. We say that is a framed curve if for all and We also say that is a framed base curve if there exists such that is a framed curve.
Let
be a framed curve and
Then, we have the following Frenet–Serret formula:
Here,
and
In addition, there exists a smooth mapping
such that:
The four functions are called the curvature of . If then In this paper, we consider the case Obviously, if and only if is a singular point of . We can use the curvature of the framed curve to analyze the singular points.
In [
14], the theorems of the existence and uniqueness for framed curves were shown as follows:
Theorem 1. Let be a smooth mapping. There exists a framed curve whose associated curvature of the framed curve is
Theorem 2. Let and be framed curves whose curvatures of the framed curves and coincide. Then, and are congruent as framed curves.
Let
be a framed curve with the curvature
and
are the base vectors of the normal plane of
, as a case similar to the Bishop frame for regular curves [
16]. We define
by:
Here,
is a smooth function. Obviously,
is also a framed curve, and we have:
By straightforward calculations, we have:
Let
be a smooth function that satisfies
Assume that
then we have:
and:
The vectors
form an adapted frame along
, and we have the following Frenet–Serret formula:
We call the vectors the generalized tangent vector, the generalized principle normal vector, and the generalized binormal vector of the framed curve, respectively, where and The functions are referred to as the framed curvature of .
Proposition 1. Let be a framed curve. The relationships among the curvature , the torsion , and the framed curvature of a regular curve are given by: Proof. By straightforward calculations, we have:
Therefore, the relationships are shown by:
☐
3. Framed Rectifying Curves
In this section, the framed rectifying curves are defined, and we investigate their properties.
Definition 2. Let be a framed curve. We call a framed rectifying curve if its position vector satisfies:for some functions and Some properties of the framed rectifying curves are shown in the following theorem.
Theorem 3. Let be a framed curve with . The following statements are equivalent.
(i) The relation between the framed curvature and the framed curve is as follows: (ii) The distance squared function satisfies for some positive constant
(iii) ξ is a constant.
(iv) is a framed rectifying curve.
Proof. Let
be a framed rectifying curve. By definition, there exist some functions
and
such that:
By using the Frenet–Serret formula and taking the derivative of (
1) with respect to
s, we have:
From the first and third equalities of (
2), we have that
This proves Statement (i). Since
we can obtain Statement (iii). From (
1) and (
2), we have that
is positive. This proves Statement (ii).
Conversely, let us assume that Statement (i) holds.
Since , by assumption, we have This means the curve is a framed rectifying curve.
If Statement (ii) holds,
where
C is a positive constant. Then, we have:
and
Therefore,
is a framed rectifying curve. Statement (iii) implies that the curve is a framed rectifying curve by an appeal to the Frenet–Serret formula. ☐
Remark 1. is a singular point of the framed rectifying curve if and only if From (2) and Statement (ii), we know that the ratio and the distance squared function have extrema at 4. Construction Approach of Framed Rectifying Curves
In [
4], the construction approach of regular rectifying curves is given by B. Y. Chen in Theorem 3, but it is not suitable for the non-regular case. In this section, a new construction approach is provided, which can be applied to both regular rectifying curves and non-regular rectifying curves. Moreover, it explicitly determines all framed rectifying curves in Euclidean three-space. First, we introduce the notion of the framed spherical curve.
Definition 3. Let be a framed curve. We call a framed spherical curve if the framed base curve is a curve on .
We show the key theorem in this section as follows.
Theorem 4. Let be a framed curve with Then, is a framed rectifying curve if and only if:where C is a constant, ρ is a positive number, and is a framed spherical curve.
Proof. Let
be a framed rectifying curve. From Theorem 3, we have
where
is a positive number. The framed rectifying curve
can be written as:
where
is a framed spherical curve. By taking the derivative of (
4), we have:
As
is orthogonal to
Therefore, Equality (
5) implies:
and we have
Then,
and substituting this equality into (
4) yields (
3).
Conversely, assume
is a framed curve defined by:
for a constant
C, a positive number
, and a framed curve
on
Let
and
Then,
By taking the derivative of this equality, we get:
and:
Equality (
7) and Equality (
8) imply that
since
We have
Then:
which shows that the distance squared function satisfies Statement (ii) in Theorem 3. It follows that
is a framed rectifying curve. ☐
Framed rectifying curves include regular rectifying curves and non-regular rectifying curves. We will give two examples.
Example 1. Let then is a space curve on We have Let and By Theorem 4, we know that the curve:is a regular rectifying curve in (Figure 1).
If is a framed curve with singular points, this is different from the case that is a regular curve.
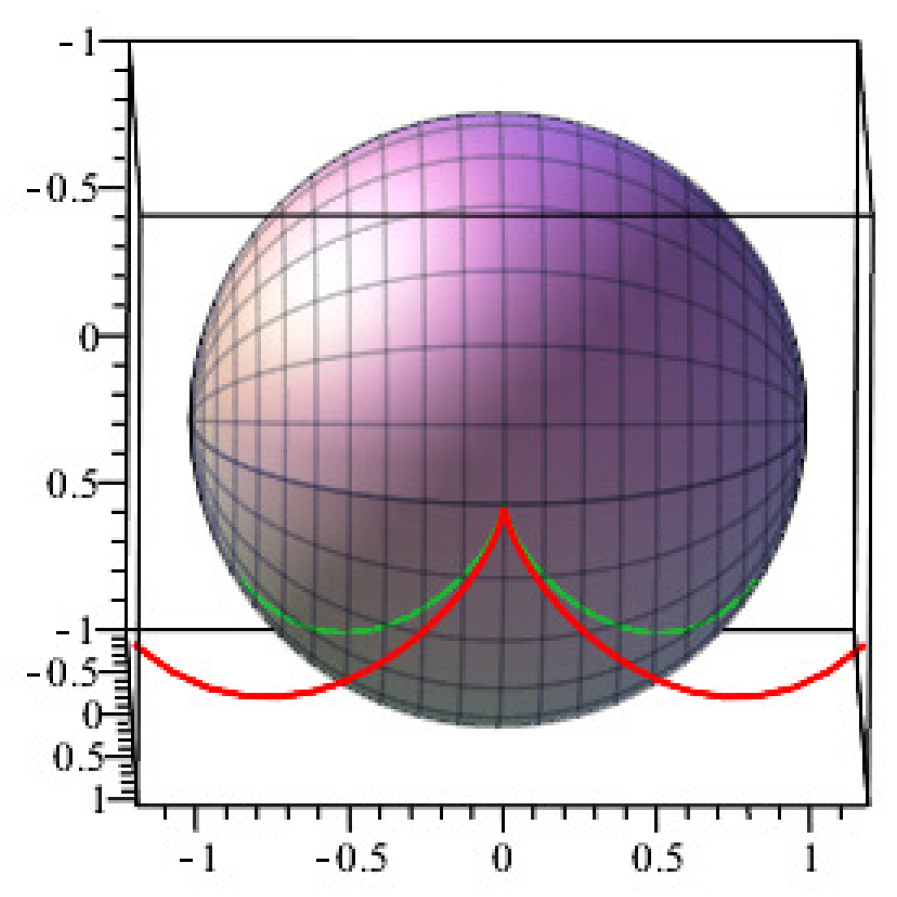
Example 2. Let then is a curve in and Let and By Theorem 4, we know that the curve:is a framed rectifying curve with a cusp in (Figure 2).
5. Framed Rectifying Curves versus Framed Helices
In this section, we define the framed helices and investigate the relations between framed helices and framed rectifying curves.
Definition 4. Let be a framed curve with . We call a framed helix if there exists a fixed unit vector satisfying:for some constant We now consider the ratio
of the framed helix.
By taking the derivative of (
10), as
and
, we have:
We know that
is in the plane whose basis vectors are
and
As
we have
By taking the derivative of (
11), we get:
then:
For framed rectifying curves, a simple characterization in terms of the ratio is shown in the following theorem.
Theorem 5. Let be a framed curve with , then is a framed rectifying curve if and only if for some constants and with
Proof. The proof is similar to that of Theorem 2 in [
4]. If
is a framed rectifying curve, from (
2), we have that
for some constant
Since
and
then the ratio of
and
satisfies
for some constants
and
with
Conversely, suppose that
is a framed curve with
, and
for some constants
and
with
If we put
and
hence, by invoking the Frenet–Serret formula, we obtain:
This means that
is congruent to a framed rectifying curve. ☐
Remark 2. If is a framed rectifying curve, we have for some constant If then as so This means that is a point.
After that, we reveal the relationship between the framed rectifying curves and the framed helices. We have the following theorem:
Theorem 6. Let be a framed curve with the framed curvature functions satisfying for some constants and If we will get framed helices; otherwise, we get framed rectifying curves.
6. Framed Rectifying Curves versus Centrodes
The centrodes play important roles in joint kinematics and mechanics (see [
5]). We can define the centrodes of framed curves. For a framed curve
in
the curve defined by the vector
, which is called the centrode of framed curve
The following results establish some relationships between framed rectifying curves and centrodes.
Theorem 7. The centrode of a framed curve with nonzero constant framed curvature function and nonconstant framed curvature function is a framed rectifying curve. Conversely, the framed rectifying curve in is the centrode of some framed curve with nonconstant framed curvature function and nonzero constant framed curvature function .
Proof. Let
be a framed curve with nonzero constant framed curvature
and nonconstant framed curvature
Consider the centrode of
:
can also be seen as a framed curve. Let the vectors
be the adapted frame along
By differentiating the centrode, then we have
, which implies that unit vector
and unit vector
at the corresponding points are parallel. Then, the first equality in Frenet–Serret formula implies that
and
at the corresponding points are also parallel. Hence,
and
are parallel, as well. Therefore, by definition, the centrode
is a framed rectifying curve.
Conversely, let
be a framed rectifying curve in
From Theorem 3, we have:
for some constant
Let There exists a framed curve whose framed curvature satisfies and
Let us consider the centrode of
, which is given by
, and its reparametrization
Then:
This means that thus, Differentiating twice, the framed curvature functions of are given by and
Therefore, the framed curves and have the same framed curvature functions. From the existence theorem and the uniqueness theorem, it follows that is congruent to Consequently, the framed rectifying curve is the centrode of a framed curve with nonconstant framed curvature and nonzero constant framed curvature p. ☐
The framed curve in Theorem 7 can be replaced by a framed curve with nonzero constant framed curvature q and nonconstant framed curvature In fact, we also have the following theorem:
Theorem 8. The centrode of a framed curve with nonzero constant framed curvature function and nonconstant framed curvature function is a framed rectifying curve. Conversely, one framed rectifying curve in is the centrode of some framed curve with nonconstant framed curvature function and nonzero constant framed curvature function .
The proof can be given in as similar way as Theorem 7.
Remark 3. The centrode of a framed curve with nonzero constant framed curvature function and nonzero constant framed curvature function is a point.
7. Contact between Framed Rectifying Curves
In this section, the contact between framed rectifying curves is considered. We now introduce the notion of circular rectifying curves as follows.
Definition 5. Let be a framed rectifying curve and:where ρ is a positive number and C is a constant. We call a circular rectifying curve if is a circle on .
Let
be a framed spherical curve. We choose
, then
and
. We show that the spherical Frenet–Serret formula of
is as follows:
where
. By the curvature functions
and
, we show the following proposition for framed spherical curves:
Proposition 2. Let be a framed spherical curve, then is a circle if and only if and .
Proof If
and
, where
k is a constant, then we consider a normal vector field
. By taking the derivative of
, we have
. This means that
is a constant vector. Moreover, we have:
This means that is the intersection of a plane and , so is a circle.
Let be a circle on . Obviously, is a plane curve and , so that Then, we can calculate that . Since , we have . This is equivalent to . Thus, .
As a corollary of Proposition 2, we have the following result:
Corollary 1. Let be a framed spherical curve, then is a great circle on if and only if and .
Now, we review the notions of contact between framed curves [
14]. Let
;
and
;
be framed curves. We say that
and
have
order contact at
,
if:
In addition, we say that
and
have at least
order contact at
,
if:
We generally say that
and
have at least first order contact at any point
,
, up to congruence as framed curves. As a conclusion of Theorem 3.7 in [
14], we show the following proposition:
Proposition 3. Let , and , be framed spherical curves. If and have at least order contact at , , we have: Conversely, if the conditions (14) and (15) hold, then and have at least order contact at , , up to congruence as framed spherical curves.
Now, we consider the contact between circles and framed spherical curves. We have a corollary of Propositions 2 and 3 as follows:
Corollary 2. Let be a framed spherical curve. and a circle have at least order contact at if and only if there exists a constant σ such that: For the construction of the framed rectifying curve in Theorem 4, we fix positive number and constant C. Let be framed spherical curves. We know , have order contact at if and only if , have order contact at . By Corollary 2, we have the following theorem, which can describe the contact between framed rectifying curves and circular rectifying curves.
Theorem 9. Let be a framed rectifying curve and and be curvature functions of the corresponding framed spherical curve. Then, and a circular rectifying curve have at least order contact at if and only if there exists a constant σ such that:

{kind=link}
{kind=link}

