A Multi-Objective DV-Hop Localization Algorithm Based on NSGA-II in Internet of Things

Abstract
:1. Introduction
2. Related Works
3. DV-Hop Algorithm and NSGA-II Algorithm
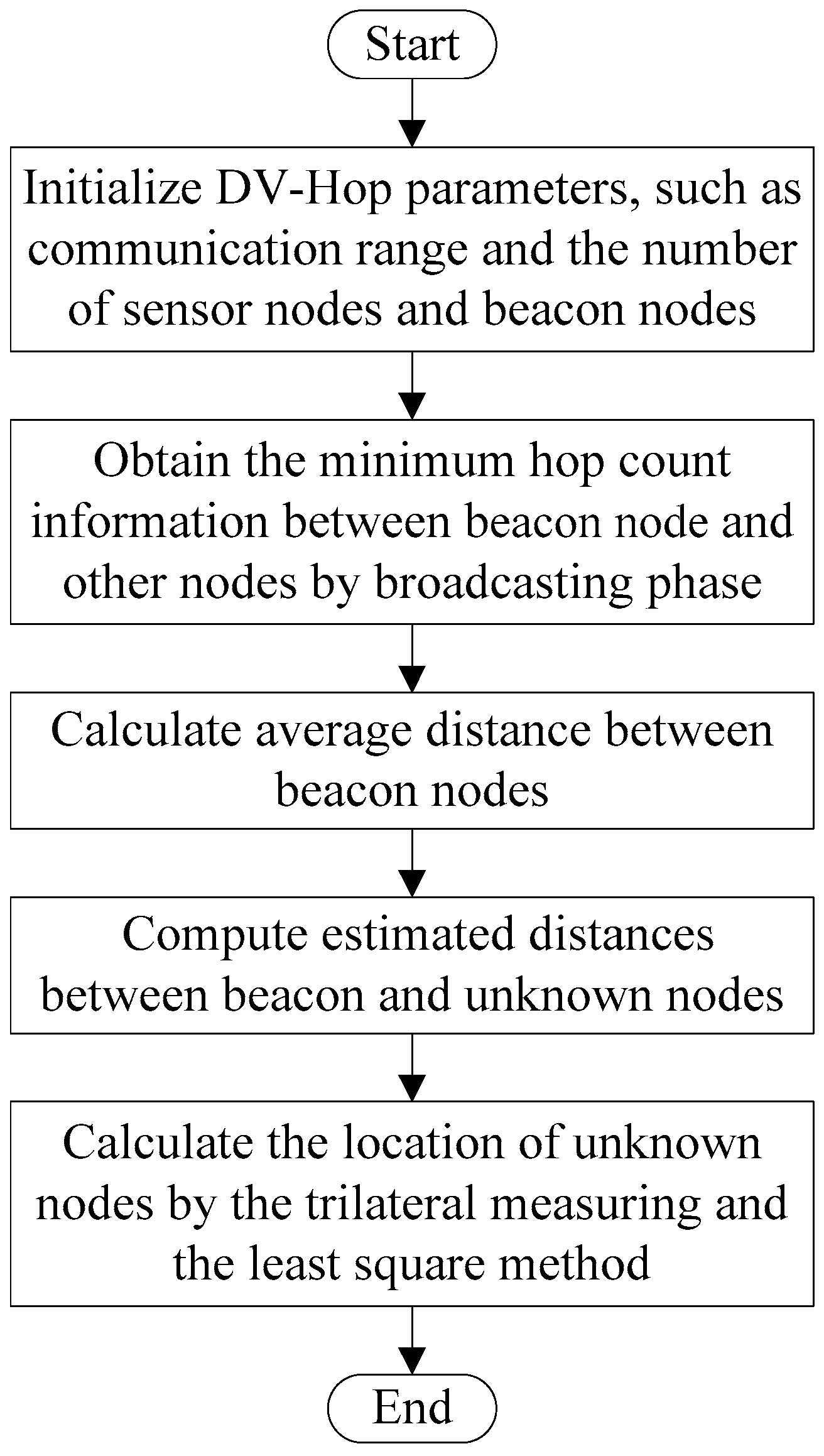
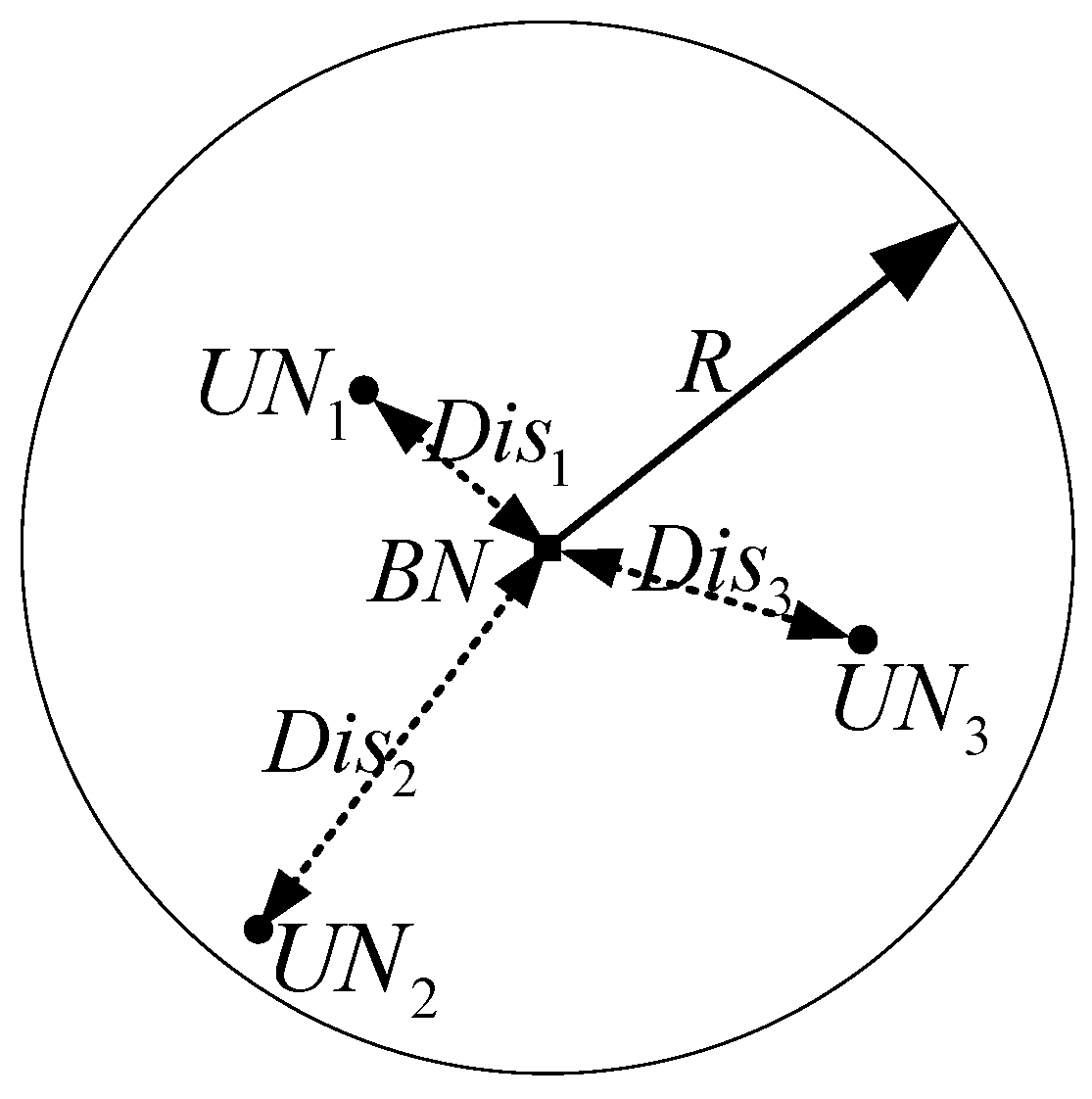
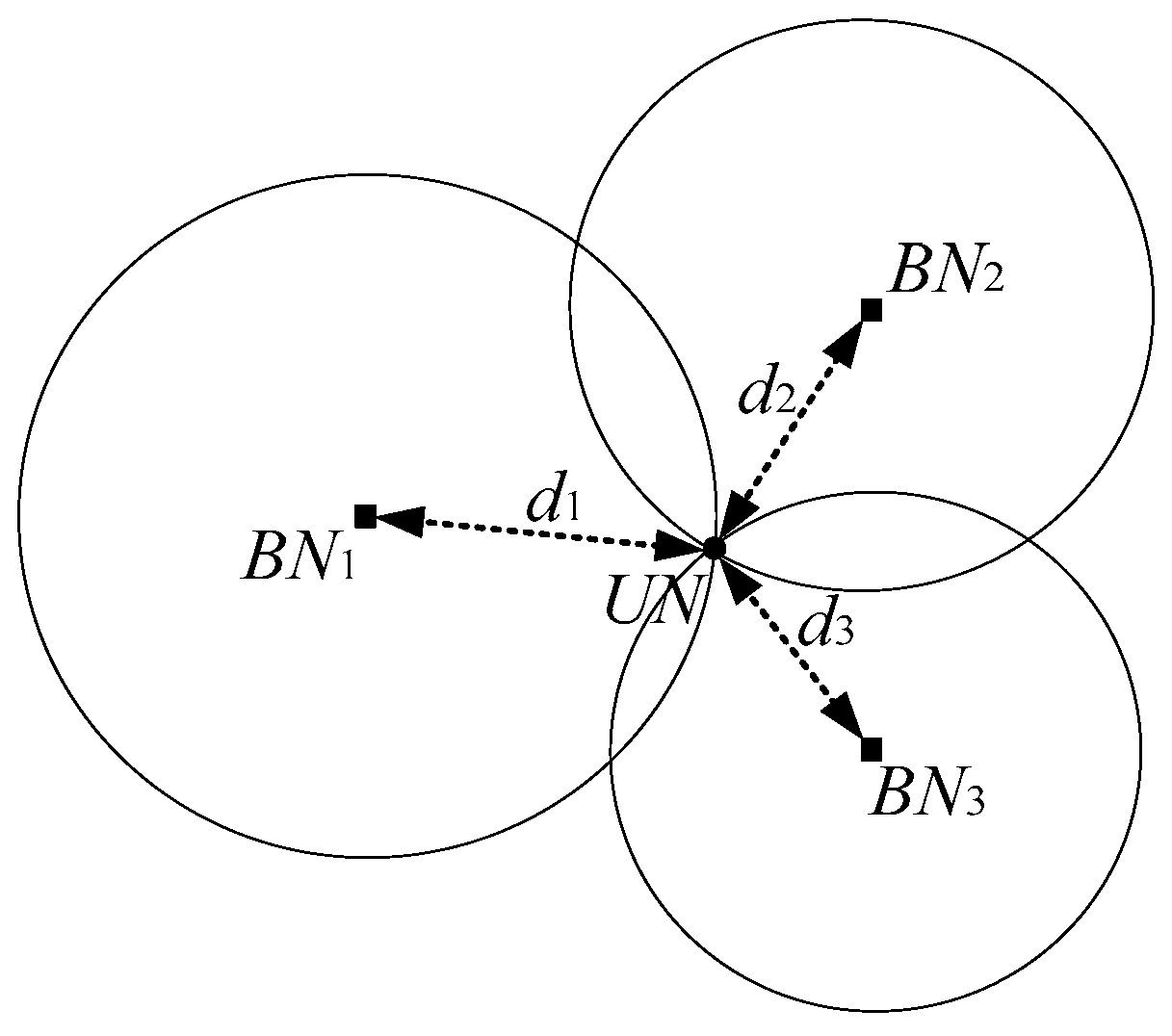
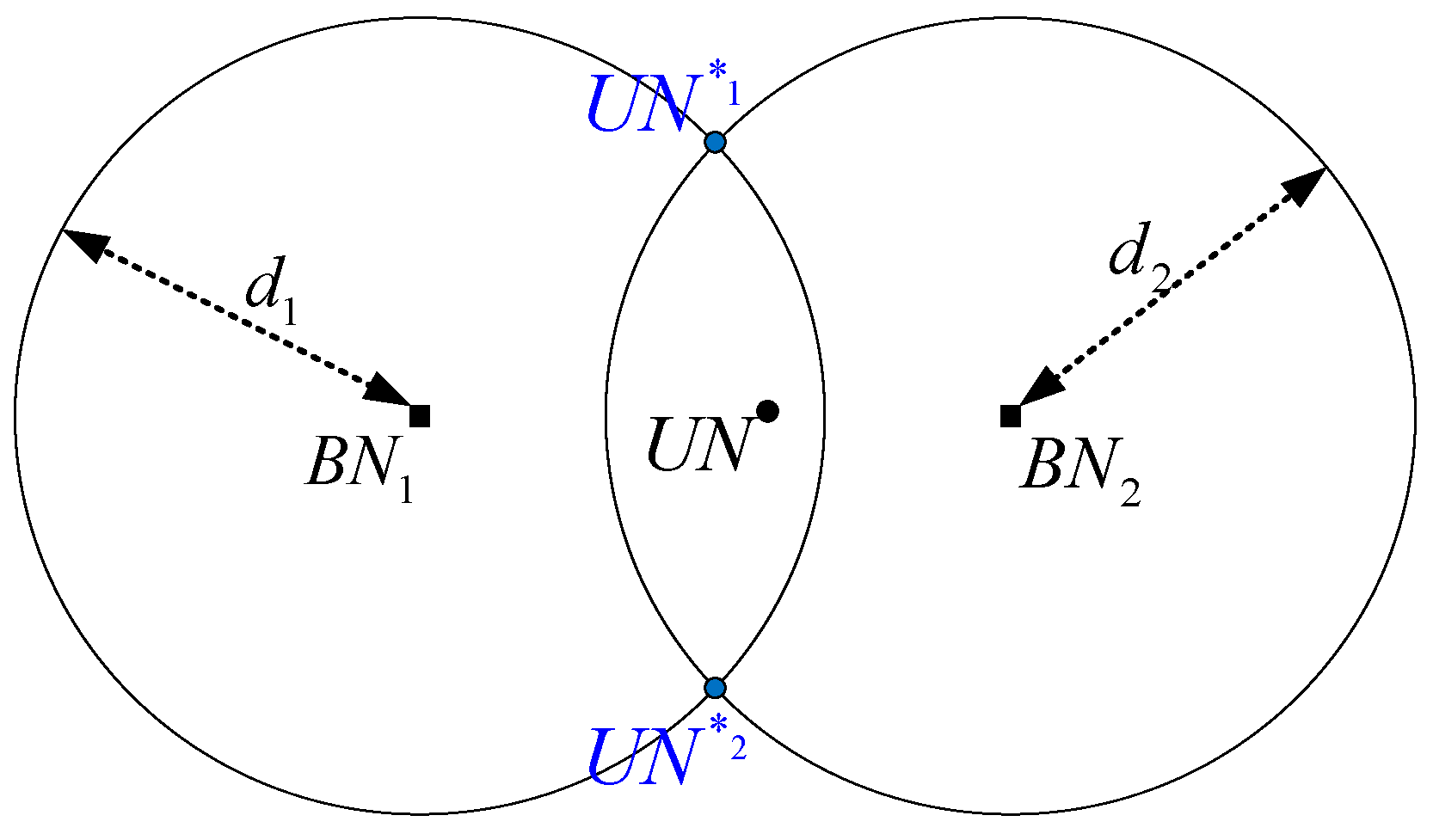
3.1. DV-Hop Algorithm
3.2. NSGA-II Algorithm
| Algorithm 1: The pseudo-code of NSGA-II |
| Begin Input: Population: NP; Dimension: D; Maximum Generation: Gmax; Cross probability: Pc; mutation probability: Pm. Initialization: compute objective values, fast non-dominated sort, selection, crossover and mutation. Generation = 1; While Generation < Gmax do Combine parent and offspring population, compute objective values and fast non-dominated sort. Selection operation. If rand() < Pc Crossover operation; End If rand() < Pm Mutation operation; End Generation = Generation + 1; End Output: The best individuals End |
4. The Proposed Multi-Objective Algorithm
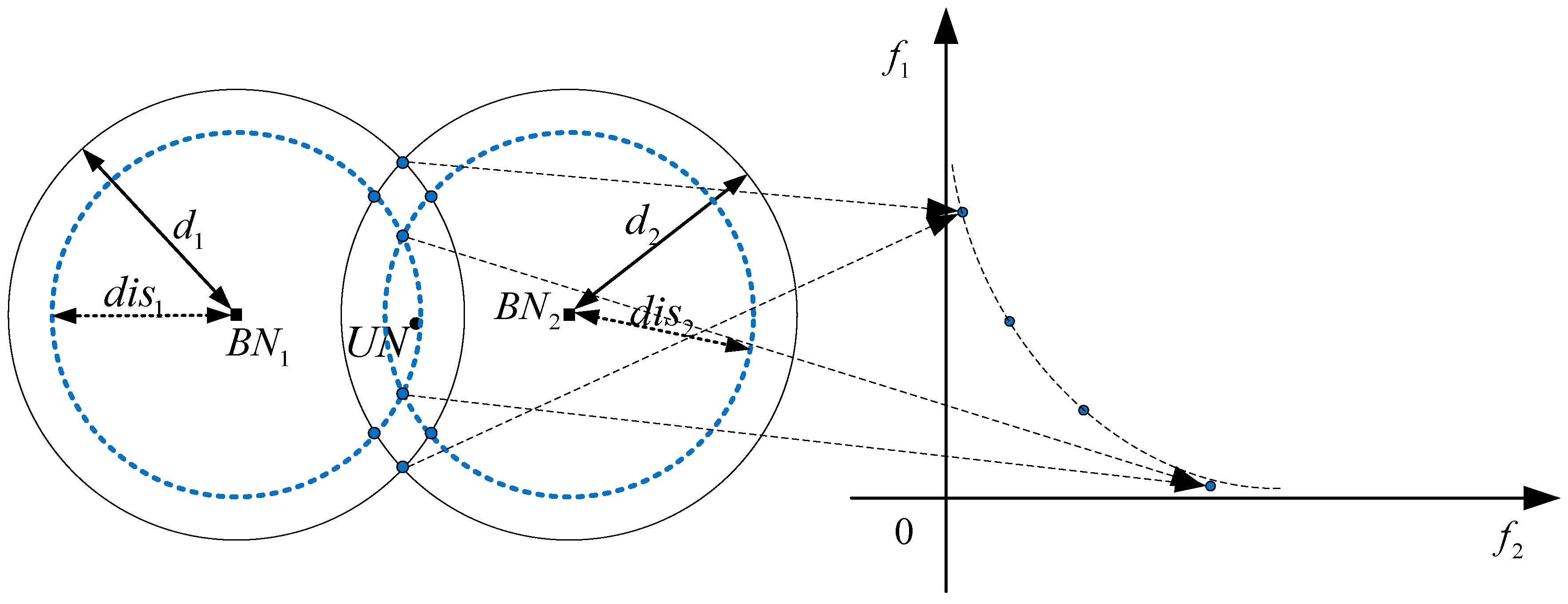
4.1. The Multi-Objective Model
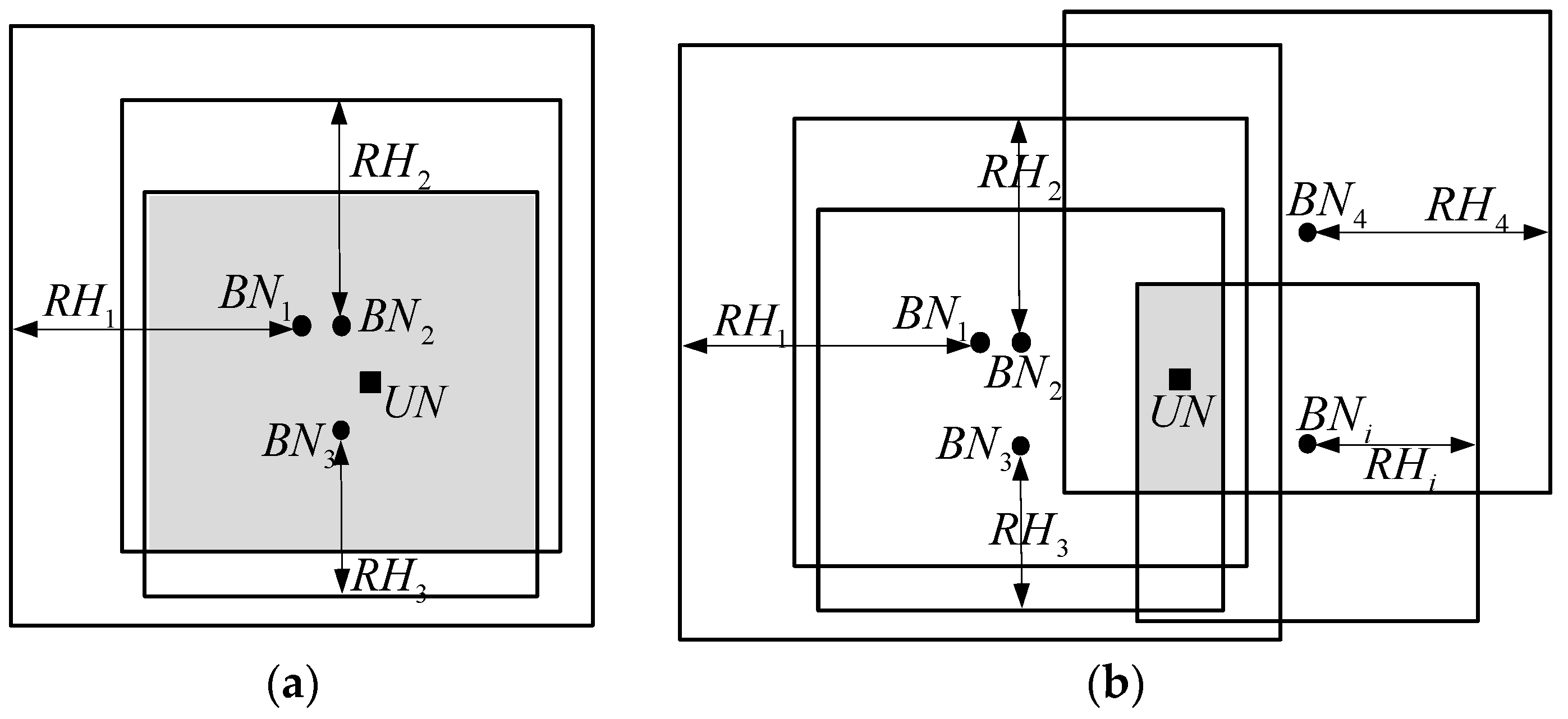
4.2. Population Constraint Strategy
4.3. NSGA-II-DV-Hop Algorithm
| Algorithm 2: The pseudo-code of NSGA-II-DV-Hop |
| Begin Input: Communication radius, number of nodes, beacon nodes, and the location of beacon nodes; Population: NP; Dimension: D; Maximum Generation: Gmax; Cross probability: Pc; mutation probability: Pm. DV-Hop algorithm with Figure 1. Initialization: Compute objective values with Equation (7) and Equation (11), fast non-dominated sort, selection, crossover and mutation. Population constraint strategy with Equation (13). Generation = 1; While Generation < Gmax do Combine parent and offspring population; compute objective values with Equation (7), Equation (11), and fast non-dominated sort. Selection operation. If rand() < Pc Perform cross-operations on the positions of different individuals in the population; End If rand() < Pm Randomly generate a position that satisfies the boundary condition; End If (the position is contradictory with the boundary condition) Randomly generate a position that satisfies the boundary condition. End Generation = Generation + 1; End Calculate average localization error with Equation (14). Output: The best location and average localization error. End |
5. Experimental Results and Analysis
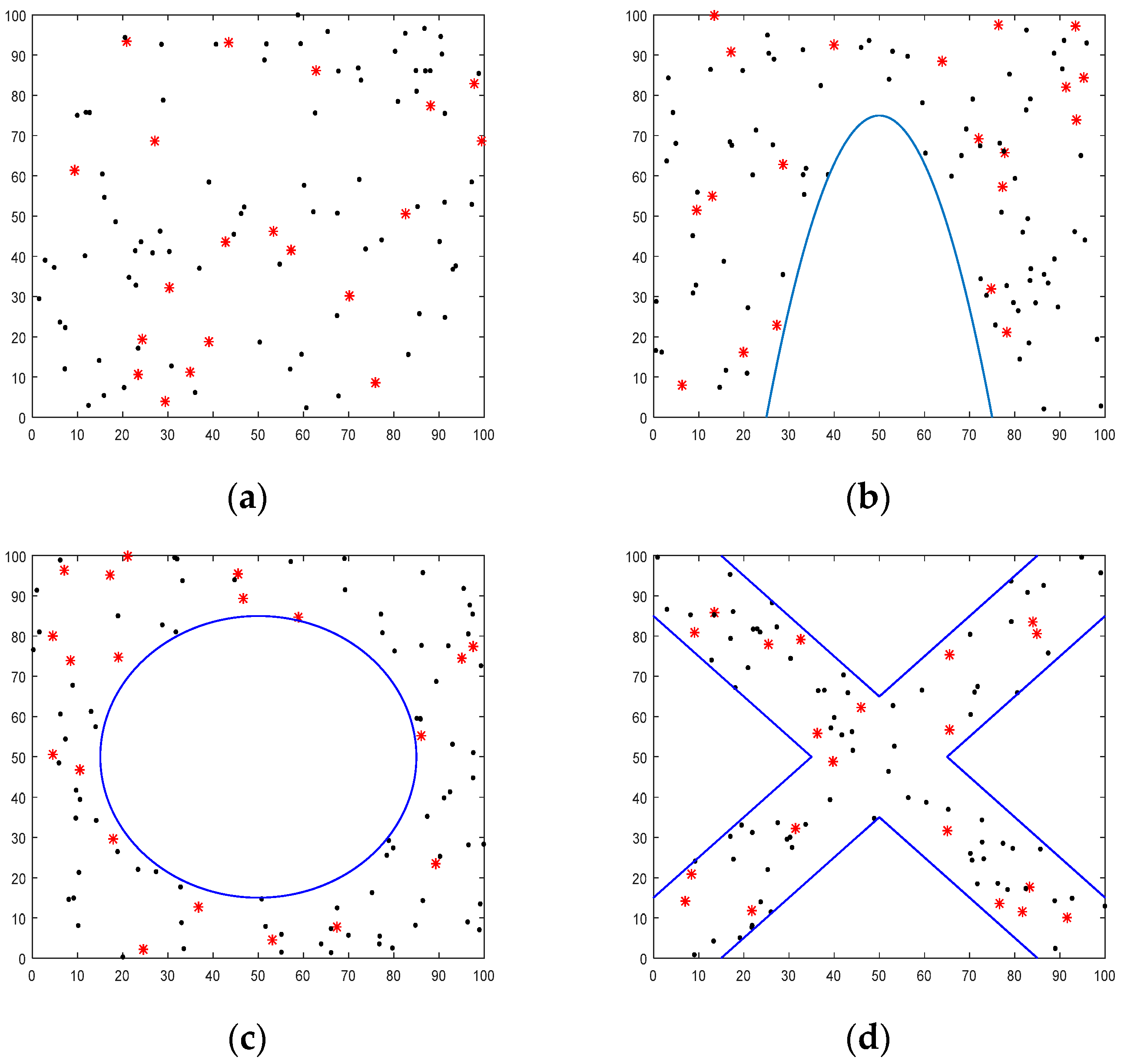
5.1. Experimental Environment and Evaluation Criteria
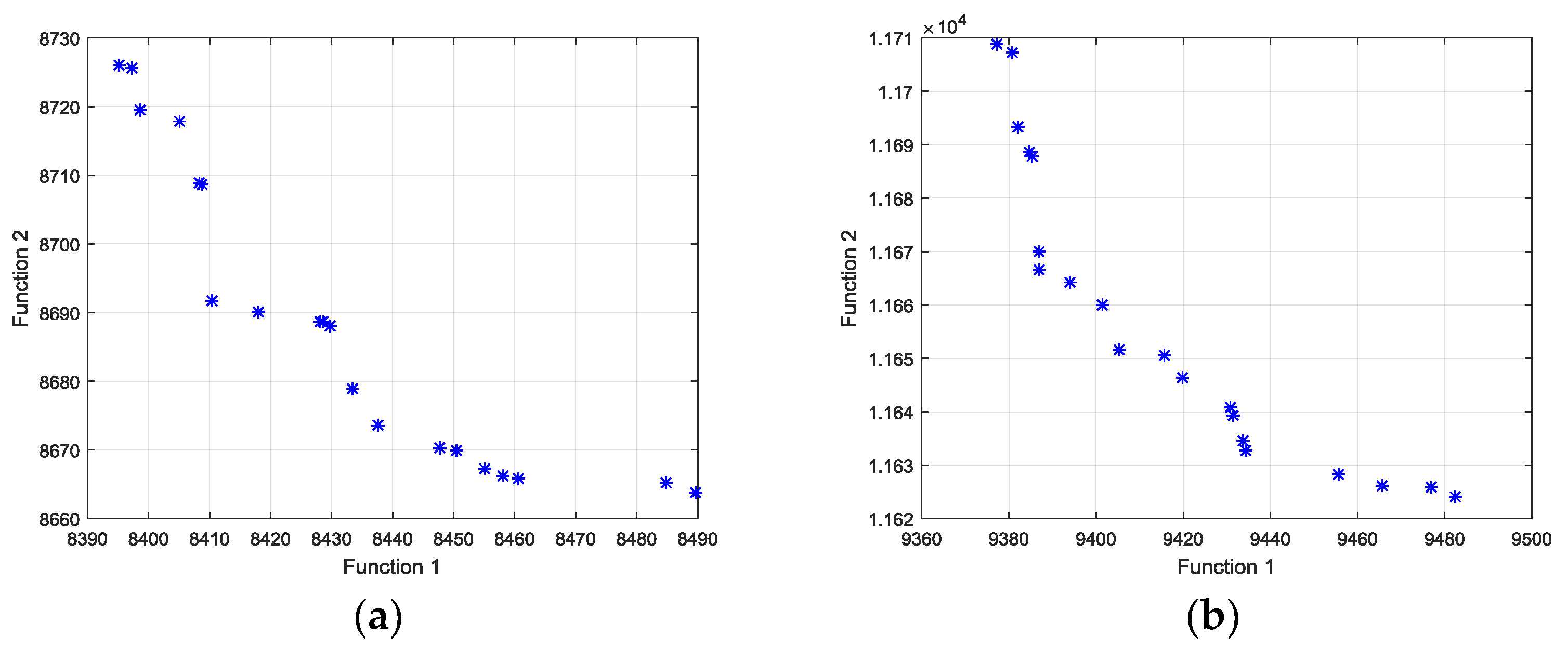
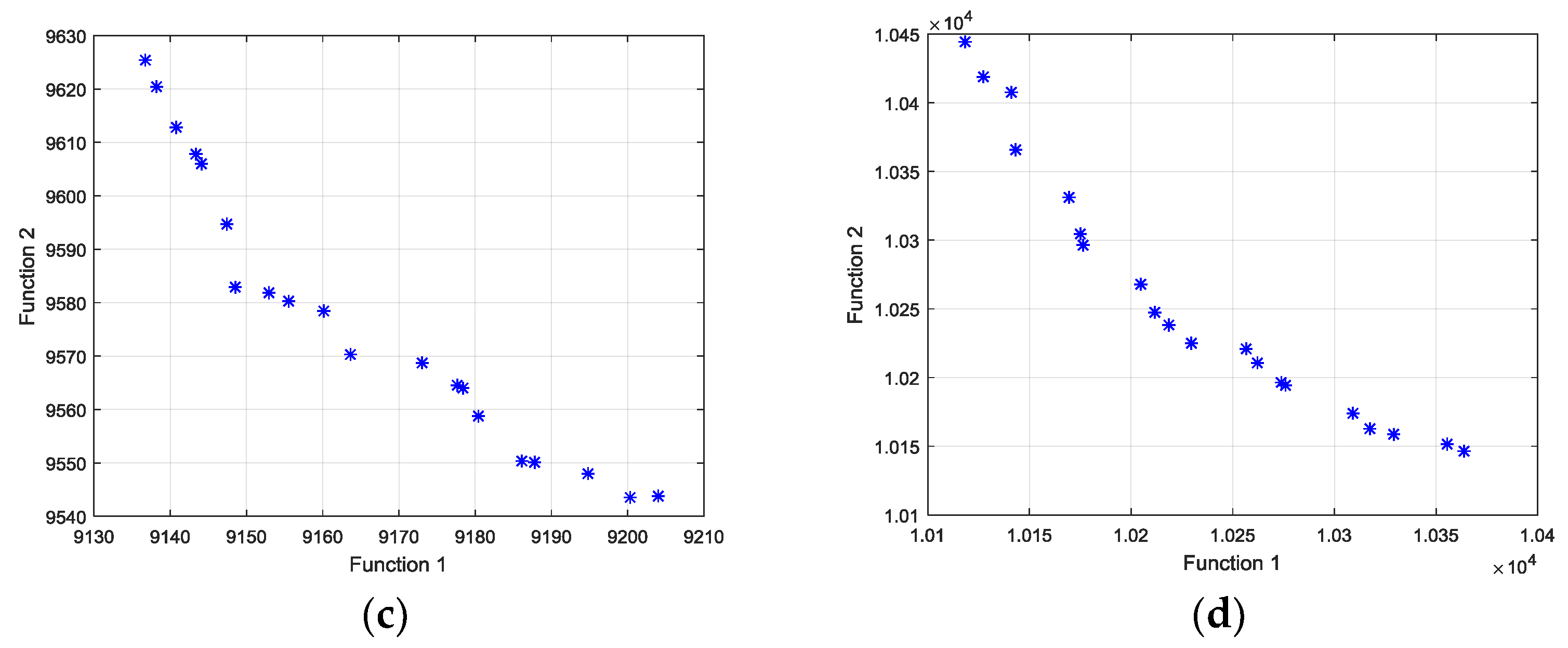
5.2. Two Objective Function Relationships
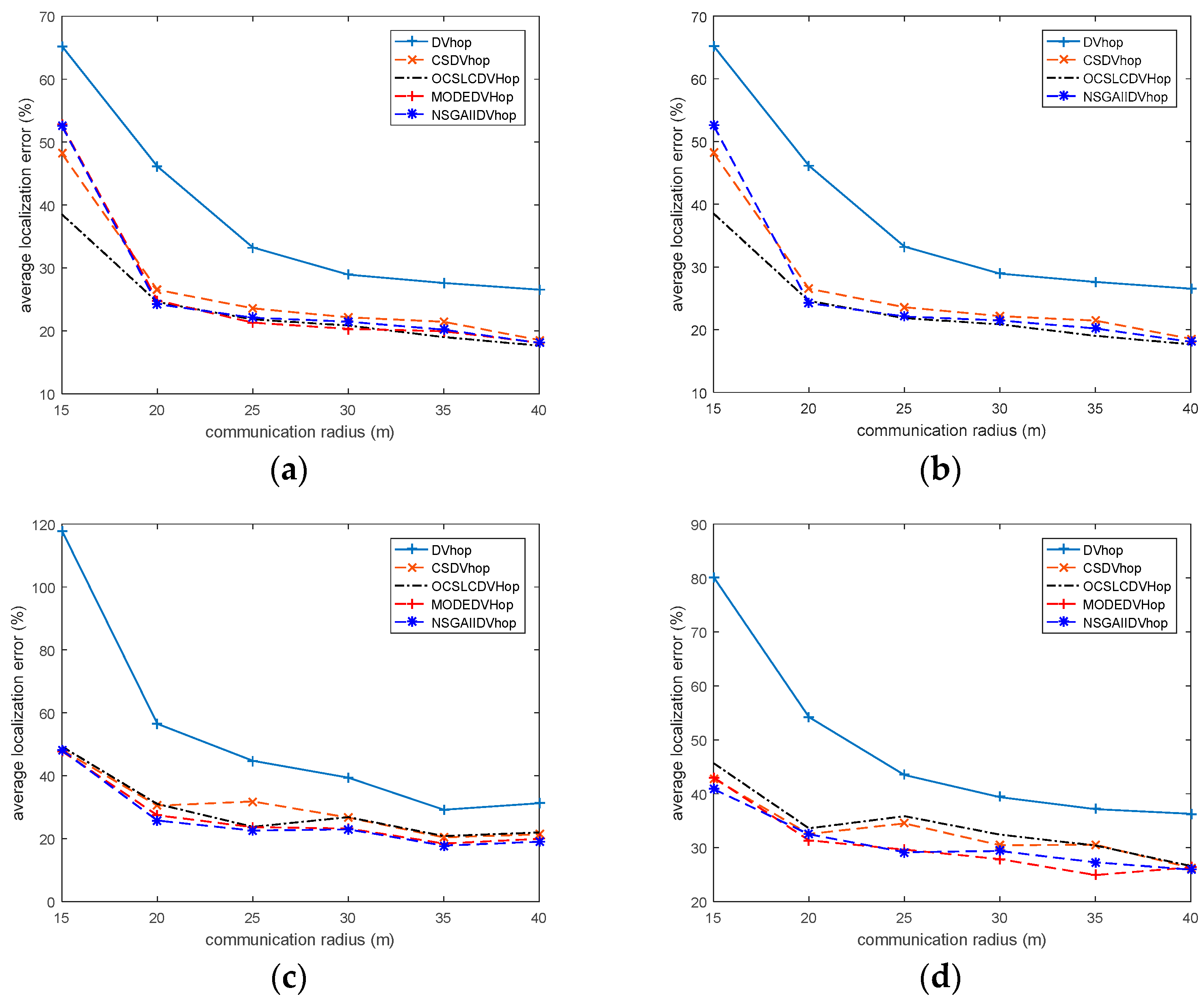
5.3. Influence of Communication Radius
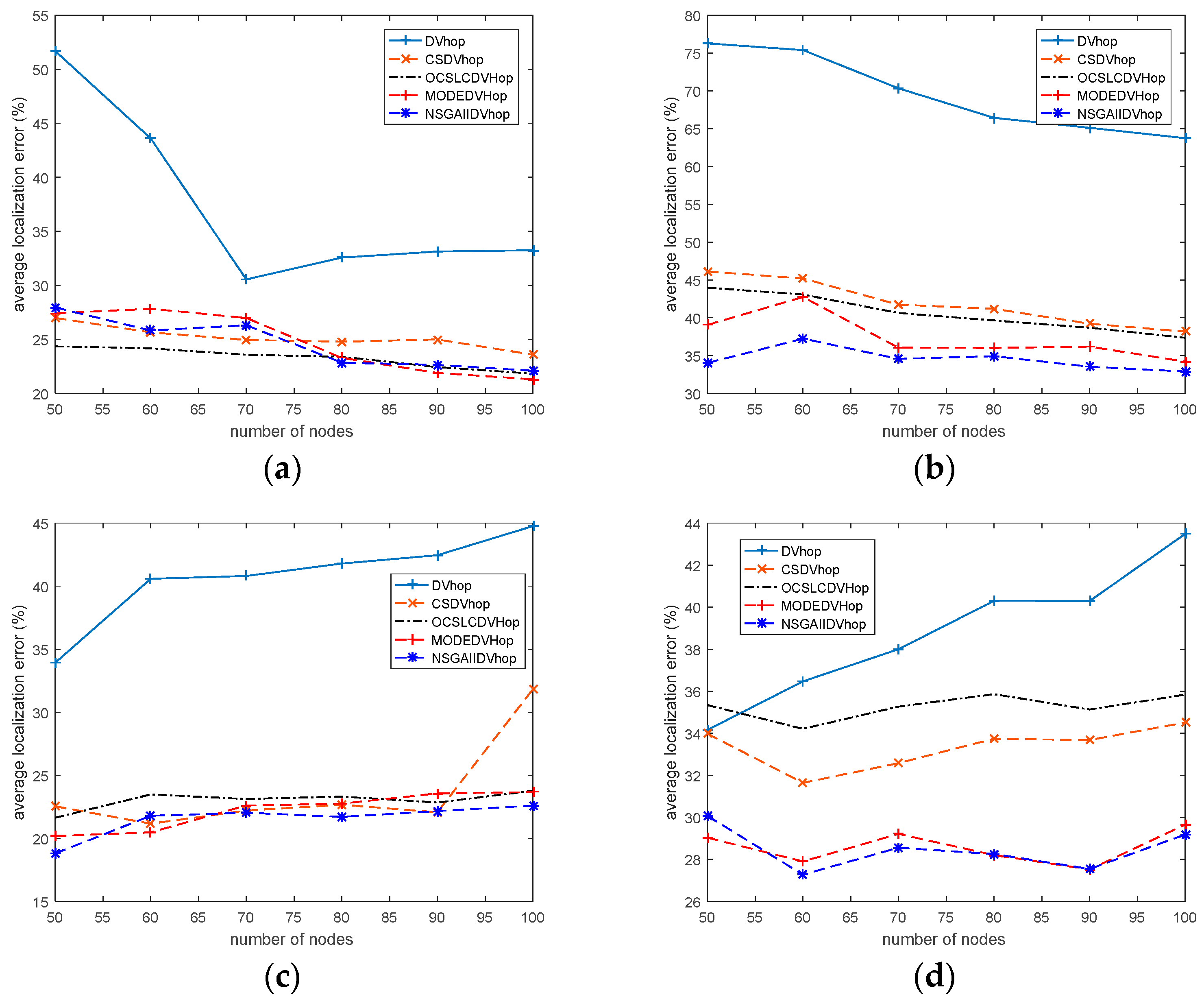
5.4. Influence of Nodes
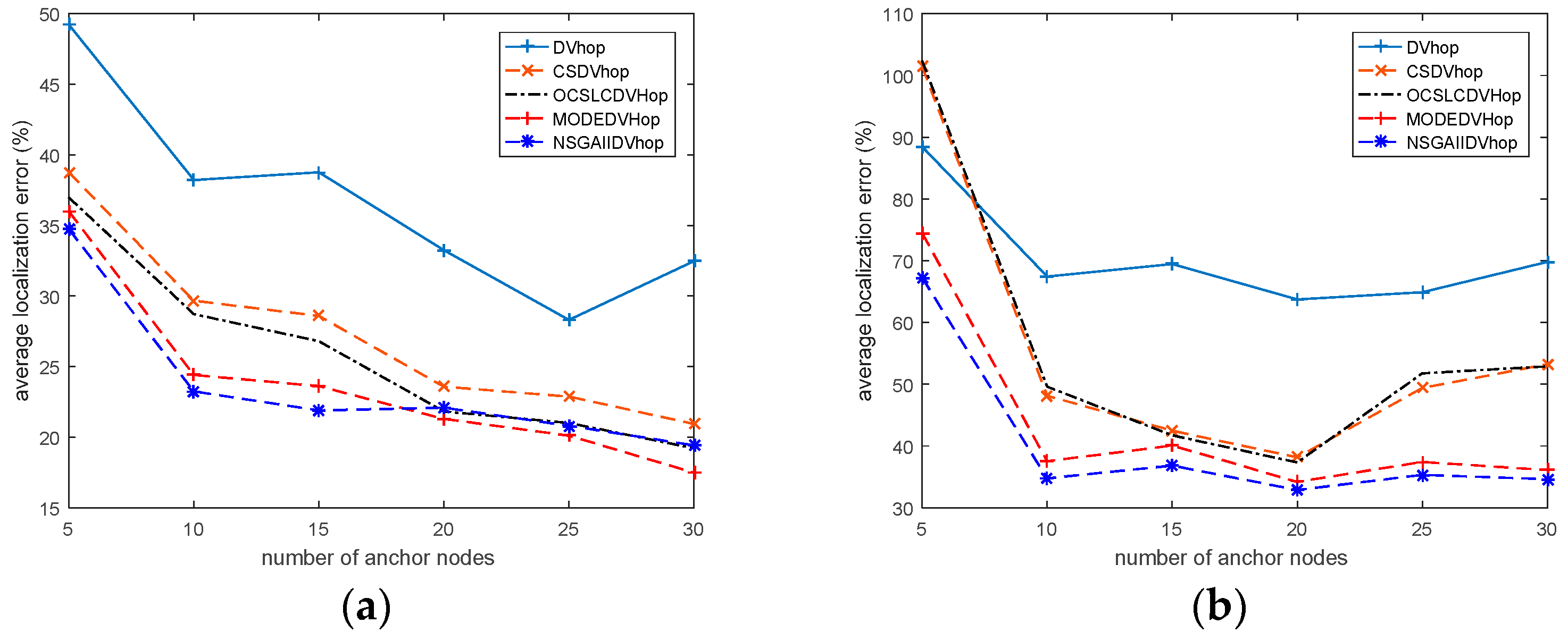
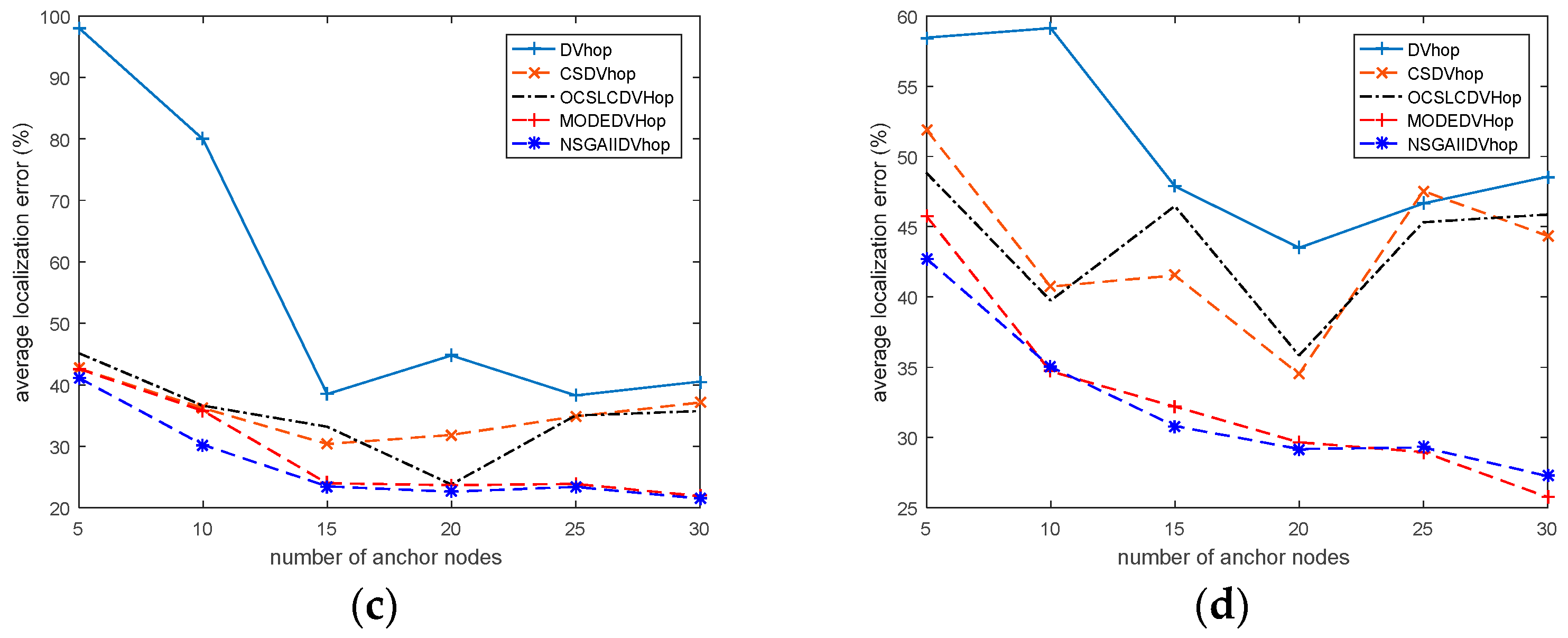
5.5. Influence of Beacon Nodes
5.6. The Standard Deviation and the Confidence Intervals
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Khaitan, S.K.; Mccalley, J.D. Design Techniques and Applications of Cyber physical Systems: A Survey. IEEE Syst. J. 2015, 9, 350–365. [Google Scholar] [CrossRef]
- Lee, E.A. Cyber Physical Systems: Design Challenges. In Proceedings of the IEEE International Symposium on Object Oriented Real-Time Distributed Computing, Orlando, FL, USA, 5–7 May 2008; pp. 363–369. [Google Scholar]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Guo, P.; Wang, J.; Li, B.; Lee, S.Y. A variable threshold-value authentication architecture for wireless mesh networks. J. Internet Technol. 2014, 15, 929–936. [Google Scholar]
- Wang, Z.; Wang, X.; Liu, L.; Huang, M.; Zhang, Y. Decentralized feedback control for wireless sensor and actuator networks with multiple controllers. Int. J. Mach. Learn. Cybern. 2017, 8, 1471–1483. [Google Scholar] [CrossRef]
- Chandanapalli, S.B.; Reddy, E.S.; Lakshmi, D.R. DFTDT: Distributed functional tangent decision tree for aqua status prediction in wireless sensor networks. Int. J. Mach. Learn. Cybern. 2017, 9, 1419–1434. [Google Scholar] [CrossRef]
- Suo, H.; Wan, J.; Huang, L.; Zou, C. Issues and Challenges of Wireless Sensor Networks Localization in Emerging Applications. In Proceedings of the International Conference on Computer Science and Electronics Engineering, Hangzhou, China, 23–25 March 2012; IEEE Computer Society: Washington, DC, USA, 2012; pp. 447–451. [Google Scholar]
- Yang, Y.X.; Li, J.L.; Xu, J.Y.; Tang, J.; Guo, H.; He, H. Contribution of the Compass satellite navigation system to global PNT users. Sci. Bull. 2011, 56, 2813. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2013, 17, 211–222. [Google Scholar] [CrossRef]
- Kaplan, E.D. Understanding GPS: Principles and Application. J. Atmos. Sol.-Terr. Phys. 1996, 59, 598–599. [Google Scholar]
- Girod, L.; Bychkovskiy, V.; Elson, J.; Estrin, D. Locating tiny sensors in time and space: A case study. In Proceedings of the IEEE International Conference on Computer Design: VLSI in Computers and Processors, Freiberg, Germany, 18 September 2002; IEEE Computer Society: Washington, DC, USA, 2002; pp. 214–219. [Google Scholar]
- Harter, A.; Hopper, A.; Steggles, P.; Ward, A.; Webster, P. The anatomy of a context-aware application. Wirel. Netw. 2002, 8, 187–197. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS) using AOA. In Proceedings of the Joint Conference of the IEEE Computer and Communications, San Francisco, CA, USA, 30 March–3 April 2003; pp. 1734–1743. [Google Scholar]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T. Range-free localization schemes in large scale sensor networks. In Proceedings of the IEEE Mobicom, San Diego, CA, USA, 14–19 September 2003; pp. 81–95. [Google Scholar]
- Capkun, S.; Hamdi, M.; Hubaux, J.P. GPS-free positioning in mobile ad-hoc networks. In Proceedings of the Hawaii International Conference on System Sciences, Maui, HI, USA, 6 January 2002; p. 10. [Google Scholar]
- Nagpal, R. Organizing a Global Coordinate System from Local Information on an Amorphous Computer. Available online: https://dspace.mit.edu/handle/1721.1/5926 (accessed on 16 December 2018).
- Niculescu, D.; Nath, B. DV Based Positioning in Ad Hoc Networks. Telecommun. Syst. 2003, 22, 267–280. [Google Scholar] [CrossRef]
- Zhao, J.; Jia, H. A hybrid localization algorithm based on DV-Distance and the twice-weighted centroid for WSN. In Proceedings of the IEEE International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; pp. 590–594. [Google Scholar]
- Hou, S.; Zhou, X.; Liu, X. A novel DV-Hop localization algorithm for asymmetry distributed wireless sensor networks. In Proceedings of the IEEE International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; pp. 243–248. [Google Scholar]
- Qian, Q.; Shen, X.; Chen, H. An Improved Node Localization Algorithm Based on DV-Hop for Wireless Sensor Networks. Comput. Sci. Inf. Syst. 2011, 8, 953–972. [Google Scholar] [CrossRef]
- Rezazadeh, J.; Moradi, M.; Ismail, A.S.; Dutkiewicz, E. Superior Path Planning Mechanism for Mobile Beacon-Assisted Localization in Wireless Sensor Networks. IEEE Sens. J. 2014, 14, 3052–3064. [Google Scholar] [CrossRef]
- Alomari, A.; Phillips, W.; Aslam, N.; Comeau, F. Dynamic Fuzzy-Logic Based Path Planning for Mobility-Assisted Localization in Wireless Sensor Networks. Sensors 2017, 17, 1904. [Google Scholar] [CrossRef] [PubMed]
- Alomari, A.; Phillips, W.; Aslam, N.; Comeau, F. Swarm Intelligence Optimization Techniques for Obstacle-Avoidance Mobility-Assisted Localization in Wireless Sensor Networks. IEEE Access 2017, 2169–3536. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization-artificial ants as a computational intelligence technique. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Cai, X.; Wang, H.; Cui, Z.; Cai, J.; Xue, Y.; Wang, L. Bat algorithm with triangle-flipping strategy for numerical optimization. Int. J. Mach. Learn. Cybern. 2018, 9, 199–215. [Google Scholar] [CrossRef]
- Cai, X.; Gao, X.; Xue, Y. Improved bat algorithm with optimal forage strategy and random disturbance strategy. Int. J. Bio-Inspired Comput. 2016, 8, 205–214. [Google Scholar] [CrossRef]
- Cui, Z.; Li, F.; Zhang, W. Bat algorithm with principal component analysis. Int. J. Mach. Learn. Cybern. 2018. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution: A simple and efficient heuristic for global optimization over continuous space. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.; Zhou, X.; Sun, H.; Jia, Z.; Yu, X.; Cui, Z. Firefly algorithm with neighborhood attraction. Inf. Sci. 2017, 382, 374–387. [Google Scholar] [CrossRef]
- Yu, G.; Feng, Y. Improving firefly algorithm using hybrid strategies. Int. J. Comput. Sci. Math. 2018, 9, 163–170. [Google Scholar] [CrossRef]
- Yu, W.X.; Wang, J. A new method to solve optimization problems via fixed point of firefly algorithm. Int. J. Bio-Inspired Comput. 2018, 11, 249–256. [Google Scholar] [CrossRef]
- Deb, S.; Deb, S.; Gao, X.Z.; et al. A new metaheuristic optimization algorithm motivated by elephant herding behaviour. Int. J. Bio-Inspired Comput. 2017, 8, 394–409. [Google Scholar]
- Cui, Z.; Cao, Y.; Cai, X.; Cai, J.; Chen, J. Optimal LEACH protocol with modified bat algorithm for big data sensing systems in Internet of Things. J. Parallel Distrib. Comput. 2017. [Google Scholar] [CrossRef]
- Gao, M.L.; He, X.H.; Luo, D.S.; Jiang, J.; Teng, Q.Z. Object tracking with improved firefly algorithm. Int. J. Comput. Sci. Math. 2018, 9, 219–231. [Google Scholar]
- Arloff, W.; Schmitt, K.R.B.; Venstrom, L. A parameter estimation method for stiff ordinary differential equations using particle swarm optimization. Int. J. Comput. Sci. Math. 2018, 9, 419–432. [Google Scholar] [CrossRef]
- Cortes, P.; Guadix, J.; Muñuzuri, J.; Onoeva, L. A discrete particle swarm optimization algorithm to operate distributed energy generation networks efficiently. Int. J. Bio-Inspired Comput. 2018, 12, 226–235. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, P.; Zhang, J.; Cui, Z.; Cai, X.; Zhang, W.; Chen, J. A Novel Bat Algorithm with Multiple Strategies Coupling for Numerical Optimization. Mathematics 2019, 7, 135. [Google Scholar] [CrossRef]
- Cui, Z.; Xue, F.; Cai, X.; Cao, Y.; Wang, G.; Chen, J. Detectin of malicious code variants based on deep learning. IEEE Trans. Ind. Inform. 2018, 14, 3187–3196. [Google Scholar] [CrossRef]
- Niu, Y.; Tian, Z.; Zhang, M.; Cai, X.; Li, J. Adaptive two-SVM multi-objective cuckoo search algorithm for software defect prediction. Int. J. Comput. Sci. Math. 2018, 11, 282–291. [Google Scholar] [CrossRef]
- Reyes-Sierra, M.; Coello Coello, C.A. Multi-Objective Particle Swarm Optimizers: A Survey of the State-of-the-Art. Int. J. Comput. Intell. Res. 2006, 2, 287–308. [Google Scholar]
- Bougherara, M.; Nedjah, N.; de Macedo Mourelle, L.; Rahmoun, R.; Sadok, A.; Bennouar, D. IP assignment for efficient NoC-based system design using multi-objective particle swarm optimization. Int. J. Bio-Inspired Comput. 2018, 12, 203–213. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, H. MOEA/D: A multi-objective evolutionary algorithm based on decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, H.; Cui, Z.; Chen, J. Hybrid multi-objective cuckoo search with dynamical local search. Memet. Comput. 2018, 10, 199–208. [Google Scholar] [CrossRef]
- Cao, Y.; Ding, Z.; Xue, F.; Rong, X. An improved twin support vector machine based on multi-objective cuckoo search for software defect prediction. Int. J. Bio-Inspired Comput. 2018, 11, 282–291. [Google Scholar] [CrossRef]
- Cui, Z.; Zhang, J.; Wang, Y.; Cao, Y.; Cai, X.; Zhang, W.; Chen, J. A pigeon-inspired optimization algorithm for many-objective optimization problems. Sci. China Inf. Sci. 2019. [Google Scholar] [CrossRef]
- Wang, G.; Cai, X.; Cui, Z.; Min, G.; Chen, J. High Performance Computing for Cyber Physical Social Systems by Using Evolutionary Multi-Objective Optimization Algorithm. IEEE Trans. Emerg. Top. Comput. 2017. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multi-objective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems; The University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison-Wesley Publishing Company: Boston, MA, USA, 1989; pp. 2104–2116. [Google Scholar]
- Nan, G.F.; Li, M.Q.; Li, J. Estimation of Node Localization with a Real-Coded Genetic Algorithm in WSNs. In Proceedings of the 2007 International Conference on Machine Learning and Cybernetics, Hong Kong, China, 19–22 August 2007; pp. 873–878. [Google Scholar]
- Yang, G.; Yi, Z.; Tianquan, N.; Keke, Y.; Tongtong, X. An improved genetic algorithm for wireless sensor networks localization. In Proceedings of the IEEE Fifth International Conference on Bio-Inspired Computing: Theories and Applications, Changsha, China, 23–26 September 2010; pp. 439–443. [Google Scholar]
- Bo, P.; Lei, L. An improved localization algorithm based on genetic algorithm in wireless sensor networks. Cogn. Neurodyn. 2015, 9, 249–256. [Google Scholar]
- Yang, X.S.; Deb, S. Cuckoo search via Levy flights. In Proceedings of the World Congress on Nature & Biologically Inspired Computing, Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Sun, B.; Cui, Z.; Dai, C.; Chen, W. DV-Hop Localization Algorithm with Cuckoo Search. Sens. Lett. 2014, 12, 444–447. [Google Scholar] [CrossRef]
- Zhang, M.; Zhu, Z.; Cui, Z. DV-hop localization algorithm with weight-based oriented cuckoo search algorithm. In Proceedings of the Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 2534–2539. [Google Scholar]
- Cui, Z.; Sun, B.; Wang, G.; Xue, Y.; Chen, J. A novel oriented cuckoo search algorithm to improve DV-Hop performance for cyber-physical systems. J. Parallel Distrib. Comput. 2017, 103, 42–52. [Google Scholar] [CrossRef]
- Cui, L.; Xu, C.; Li, G.; Minga, Z.; Fenga, Y.; Lua, N. A High Accurate Localization Algorithm with DV-Hop and Differential Evolution for Wireless Sensor Network. Appl. Soft Comput. 2018, 68, 39–52. [Google Scholar] [CrossRef]
- Chen, W.; Jiang, X.; Li, X.; Gao, J.; Xu, X.; Ding, S. Wireless Sensor Network nodes correlation method in coal mine tunnel based on Bayesian decision. Meas. J. Int. Meas. Confed. 2013, 46, 2335–2340. [Google Scholar] [CrossRef]
- Farjow, W.; Raahemifar, K.; Fernando, X. Novel wireless channels characterization model for underground mines. Appl. Math. Model. 2015, 39, 5997–6007. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Pc | 1 |
| Pm | 1/c (c refers to the variable dimension) |
| Population | 20 |
| Largest iterations | 500 |
| R(m) | 25 |
| Nodes | 100 |
| Beacon nodes | 20 |
| Communication Radius | 15 | 20 | 25 | 30 | 35 | 40 | |
|---|---|---|---|---|---|---|---|
| random topology | DV-Hop | 65.24 | 46.14 | 33.25 | 28.92 | 27.59 | 26.54 |
| CS-DV-Hop | 48.17 | 26.52 | 23.58 | 22.15 | 21.44 | 18.54 | |
| OCS-LC-DV-Hop | 38.52 | 24.58 | 21.83 | 20.84 | 19.01 | 17.65 | |
| MODE-DV-Hop | 52.71 | 24.84 | 21.30 | 20.32 | 19.93 | 18.13 | |
| NSGAII-DV-Hop | 52.57 | 24.23 | 22.09 | 21.46 | 20.19 | 18.06 | |
| C-shaped random topology | DV-Hop | 172.33 | 112.53 | 63.73 | 49.78 | 44.81 | 41.62 |
| CS-DV-Hop | 84.30 | 62.38 | 38.17 | 31.25 | 31.42 | 29.93 | |
| OCS-LC-DV-Hop | 81.98 | 58.59 | 37.35 | 30.46 | 32.09 | 29.36 | |
| MODE-DV-Hop | 66.80 | 51.23 | 34.20 | 30.44 | 27.74 | 28.72 | |
| NSGAII-DV-Hop | 57.56 | 49.54 | 32.89 | 28.89 | 28.87 | 28.37 | |
| O-shaped random topology | DV-Hop | 117.88 | 56.50 | 44.77 | 39.39 | 29.24 | 31.28 |
| CS-DV-Hop | 48.27 | 30.51 | 31.83 | 26.72 | 20.44 | 21.38 | |
| OCS-LC-DV-Hop | 49.32 | 31.05 | 23.77 | 26.86 | 20.85 | 21.98 | |
| MODE-DV-Hop | 47.81 | 27.44 | 23.67 | 23.24 | 18.48 | 19.97 | |
| NSGAII-DV-Hop | 48.17 | 25.78 | 22.59 | 22.96 | 17.80 | 19.06 | |
| X-shaped random topology | DV-Hop | 80.18 | 54.22 | 43.49 | 39.39 | 37.15 | 36.29 |
| CS-DV-Hop | 42.84 | 32.54 | 34.51 | 30.46 | 30.55 | 26.28 | |
| OCS-LC-DV-Hop | 45.68 | 33.60 | 35.84 | 32.43 | 30.41 | 26.60 | |
| MODE-DV-Hop | 43.04 | 31.37 | 29.65 | 27.88 | 24.93 | 26.38 | |
| NSGAII-DV-Hop | 40.89 | 32.49 | 29.18 | 29.39 | 27.30 | 25.93 | |
| Number of Nodes | 50 | 60 | 70 | 80 | 90 | 100 | |
|---|---|---|---|---|---|---|---|
| random topology | DV-Hop | 51.70 | 43.60 | 30.56 | 32.57 | 33.13 | 33.25 |
| CS-DV-Hop | 26.98 | 25.65 | 24.94 | 24.78 | 24.99 | 23.58 | |
| OCS-LC-DV-Hop | 24.35 | 24.17 | 23.57 | 23.39 | 22.43 | 21.83 | |
| MODE-DV-Hop | 27.41 | 27.83 | 26.98 | 23.29 | 21.89 | 21.30 | |
| NSGAII-DV-Hop | 27.95 | 25.82 | 26.31 | 22.84 | 22.64 | 22.09 | |
| C-shaped random topology | DV-Hop | 76.27 | 75.39 | 70.34 | 66.42 | 65.12 | 63.73 |
| CS-DV-Hop | 46.12 | 45.19 | 41.73 | 41.18 | 39.21 | 38.17 | |
| OCS-LC-DV-Hop | 43.98 | 43.07 | 40.63 | 39.64 | 38.68 | 37.35 | |
| MODE-DV-Hop | 39.05 | 42.74 | 36.04 | 36.01 | 36.18 | 34.20 | |
| NSGAII-DV-Hop | 34.01 | 37.24 | 34.56 | 34.92 | 33.52 | 32.89 | |
| O-shaped random topology | DV-Hop | 33.92 | 40.59 | 40.82 | 41.80 | 42.46 | 44.77 |
| CS-DV-Hop | 22.54 | 21.16 | 22.20 | 22.66 | 22.06 | 31.83 | |
| OCS-LC-DV-Hop | 21.63 | 23.48 | 23.12 | 23.31 | 22.84 | 23.77 | |
| MODE-DV-Hop | 20.18 | 20.47 | 22.60 | 22.75 | 23.56 | 23.67 | |
| NSGAII-DV-Hop | 18.79 | 21.78 | 22.03 | 21.70 | 22.16 | 22.59 | |
| X-shaped random topology | DV-Hop | 34.16 | 36.47 | 38.00 | 40.31 | 40.30 | 43.49 |
| CS-DV-Hop | 33.98 | 31.64 | 32.58 | 33.74 | 33.68 | 34.51 | |
| OCS-LC-DV-Hop | 35.34 | 34.21 | 35.27 | 35.86 | 35.13 | 35.84 | |
| MODE-DV-Hop | 29.03 | 27.90 | 29.21 | 28.20 | 27.52 | 29.65 | |
| NSGAII-DV-Hop | 30.07 | 27.27 | 28.55 | 28.25 | 27.54 | 29.18 | |
| Number of Baecon Nodes | 5 | 10 | 15 | 20 | 25 | 30 | |
|---|---|---|---|---|---|---|---|
| random topology | DV-Hop | 49.21 | 38.21 | 38.77 | 33.25 | 28.31 | 32.48 |
| CS-DV-Hop | 38.76 | 29.67 | 28.59 | 23.58 | 22.88 | 20.94 | |
| OCS-LC-DV-Hop | 36.98 | 28.72 | 26.80 | 21.83 | 21.01 | 19.22 | |
| MODE-DV-Hop | 35.99 | 24.41 | 23.62 | 21.30 | 20.11 | 17.49 | |
| NSGAII-DV-Hop | 34.74 | 23.25 | 21.90 | 22.09 | 20.81 | 19.43 | |
| C-shaped random topology | DV-Hop | 88.45 | 67.42 | 69.45 | 63.73 | 64.88 | 69.80 |
| CS-DV-Hop | 101.44 | 48.14 | 42.49 | 38.17 | 49.41 | 53.24 | |
| OCS-LC-DV-Hop | 102.36 | 49.62 | 41.73 | 37.35 | 51.77 | 52.90 | |
| MODE-DV-Hop | 74.48 | 37.55 | 40.08 | 34.20 | 37.43 | 36.11 | |
| NSGAII-DV-Hop | 67.25 | 34.78 | 36.83 | 32.89 | 35.34 | 34.63 | |
| O-shaped random topology | DV-Hop | 98.08 | 79.95 | 38.47 | 44.77 | 38.28 | 40.49 |
| CS-DV-Hop | 42.65 | 36.22 | 30.35 | 31.83 | 34.84 | 37.10 | |
| OCS-LC-DV-Hop | 45.15 | 36.60 | 33.17 | 23.77 | 34.99 | 35.72 | |
| MODE-DV-Hop | 42.59 | 35.76 | 23.97 | 23.67 | 23.86 | 21.88 | |
| NSGAII-DV-Hop | 41.14 | 30.23 | 23.46 | 22.59 | 23.38 | 21.47 | |
| X-shaped random topology | DV-Hop | 58.46 | 59.14 | 47.89 | 43.49 | 46.66 | 48.57 |
| CS-DV-Hop | 51.90 | 40.74 | 41.54 | 34.51 | 47.54 | 44.36 | |
| OCS-LC-DV-Hop | 48.83 | 39.74 | 46.47 | 35.84 | 45.32 | 45.87 | |
| MODE-DV-Hop | 45.76 | 34.70 | 32.19 | 29.65 | 28.96 | 25.75 | |
| NSGAII-DV-Hop | 42.74 | 35.03 | 30.81 | 29.18 | 29.29 | 27.25 | |
| Random Topology | C-Shaped Random Topology | O-Shaped Random Topology | X-Shaped Random Topology | ||
|---|---|---|---|---|---|
| the standard deviation and the confidence intervals (probably at 95%) | CS-DV-Hop | 0.5636 | 0.5241 | 0.1390 | 0.2150 |
| [0.46, 0.67] | [0.41, 0.70] | [0.11, 0.19] | [0.17, 0.29] | ||
| 23.5816 | 38.1680 | 31.8336 | 34.5050 | ||
| [23.12, 24.03] | [37.97, 38.36] | [31.78, 31.89] | [34.42, 34.59] | ||
| OCS-LC-DV-Hop | 0.9243 | 0.4277 | 0.6448 | 0.1736 | |
| [0.67, 1.31] | [0.34, 0.58] | [0.51, 0.87] | [0.13, 0.23] | ||
| 21.8342 | 37.3458 | 23.7727 | 35.8445 | ||
| [21.04, 22.21] | [37.19, 37.51] | [23.53, 24.01] | [35.77, 35.91] | ||
| MODE-DV-Hop | 1.2770 | 0.7446 | 0.6658 | 1.1133 | |
| [1.02, 1.71] | [0.59, 1.00] | [0.53, 0.89] | [0.88, 1.49] | ||
| 21.3018 | 34.2048 | 23.6688 | 29.6472 | ||
| [20.82, 21.77] | [33.92, 34.48] | [23.42, 23.91] | [29.23, 30.06] | ||
| NSGA-II-DV-Hop | 0.7005 | 0.4887 | 0.4911 | 0.8246 | |
| [0.55, 0.94] | [0.38, 0.66] | [0.39, 0.66] | [0.65, 1.11] | ||
| 22.0850 | 32.8934 | 22.5942 | 29.1820 | ||
| [21.82, 22.35] | [32.71, 33.08] | [22.41, 22.77] | [28.87, 29.48] | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Xue, F.; Li, H.; Cui, Z.; Xie, L.; Chen, J. A Multi-Objective DV-Hop Localization Algorithm Based on NSGA-II in Internet of Things. Mathematics 2019, 7, 184. https://doi.org/10.3390/math7020184
Wang P, Xue F, Li H, Cui Z, Xie L, Chen J. A Multi-Objective DV-Hop Localization Algorithm Based on NSGA-II in Internet of Things. Mathematics. 2019; 7(2):184. https://doi.org/10.3390/math7020184
Chicago/Turabian StyleWang, Penghong, Fei Xue, Hangjuan Li, Zhihua Cui, Liping Xie, and Jinjun Chen. 2019. "A Multi-Objective DV-Hop Localization Algorithm Based on NSGA-II in Internet of Things" Mathematics 7, no. 2: 184. https://doi.org/10.3390/math7020184
APA StyleWang, P., Xue, F., Li, H., Cui, Z., Xie, L., & Chen, J. (2019). A Multi-Objective DV-Hop Localization Algorithm Based on NSGA-II in Internet of Things. Mathematics, 7(2), 184. https://doi.org/10.3390/math7020184