Variational Partitioned Runge–Kutta Methods for Lagrangians Linear in Velocities

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Geometric Setup
2.1. Equations of Motion
2.2. Symplectic Forms
2.3. Symplectic Flows
3. Veselov Discretization and Discrete Mechanics
3.1. Discrete Mechanics
3.2. Exact Discrete Lagrangian
3.3. Singular Perturbation Problem
3.4. Exact Discrete Legendre Transform
3.5. Example
3.6. Variational Error Analysis
4. Variational Partitioned Runge–Kutta Methods
4.1. VPRK Methods as PRK Methods for the “Hamiltonian” DAE
4.1.1. Existence and Uniqueness of the Numerical Solution
4.1.2. Remarks
- For a non-partitioned Runge–Kutta method, we have , and the condition in Equation (71) is satisfied if is invertible, and the mass matrix , as defined in Section 2.1, is invertible in U and its inverse is bounded.
- If is antisymmetric, then the condition in Equation (71) is satisfied if is invertible, and the matrix is invertible in U and its inverse is bounded.
4.2. Linear
4.2.1. Convergence
4.2.2. Backward Error Analysis
4.3. Nonlinear
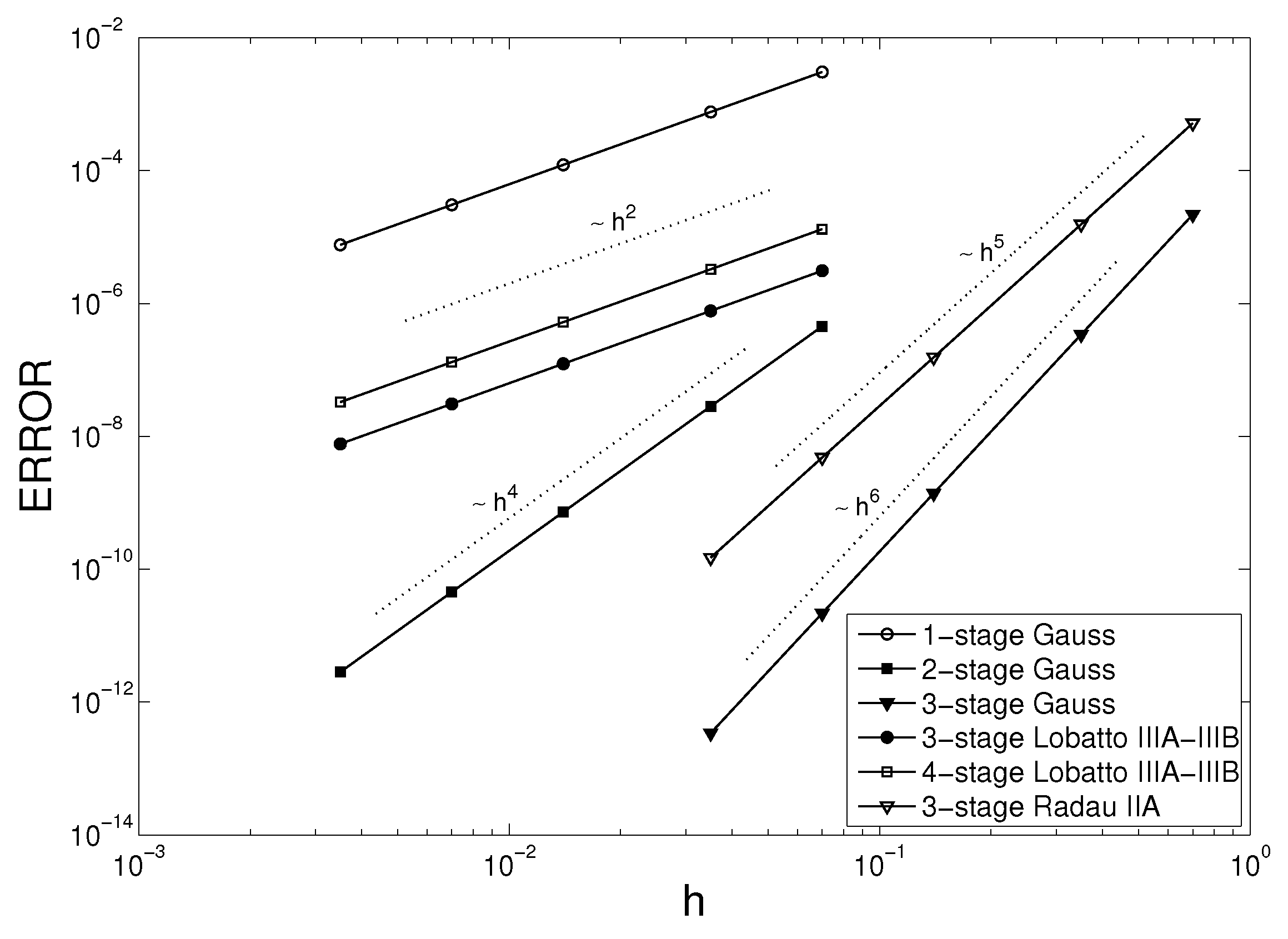
4.3.1. Runge–Kutta Methods
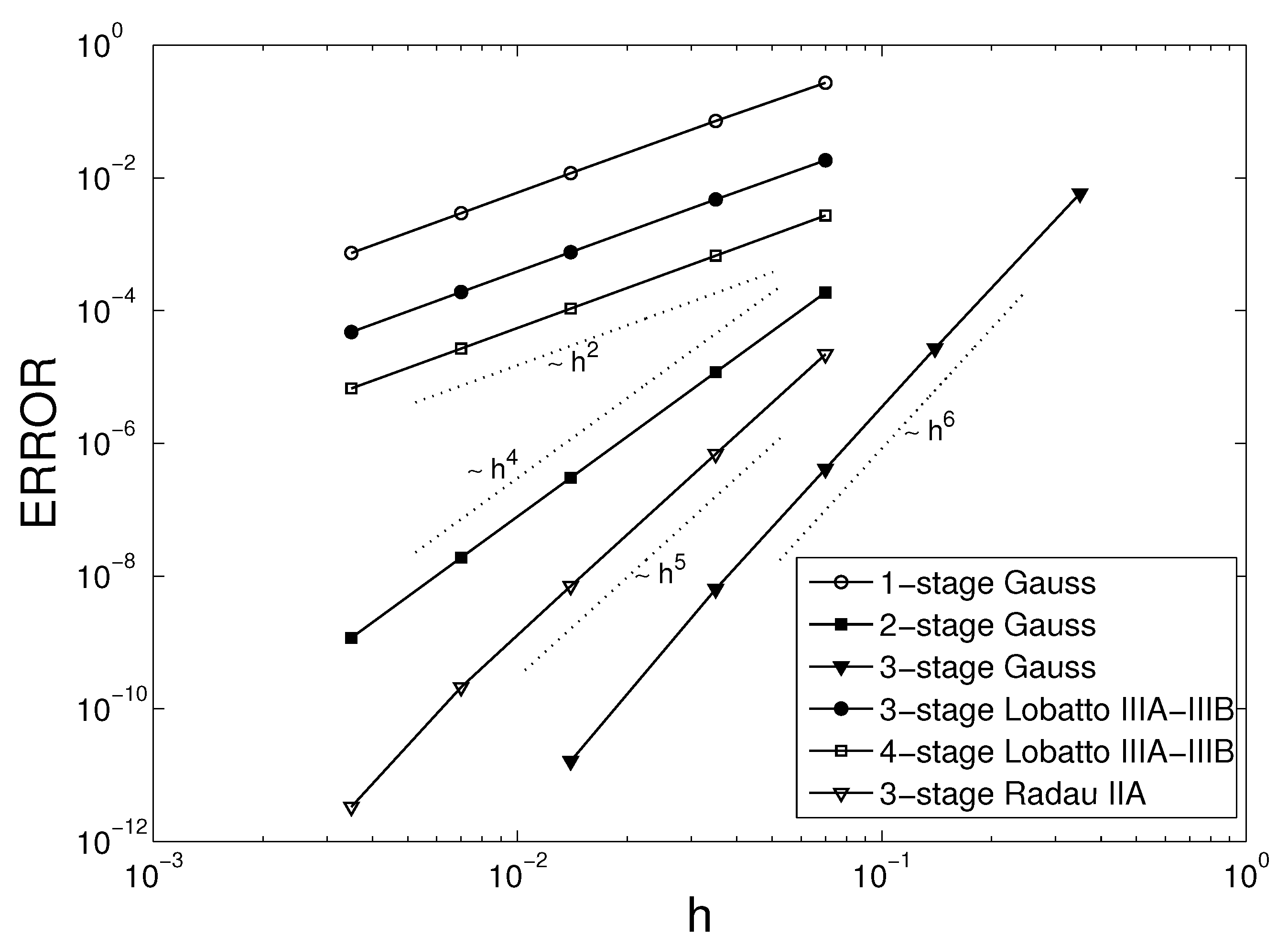
- s-stage Gauss method—convergent of order ; and
- s-stage Radau IIA method—convergent of order .
4.3.2. Partitioned Runge–Kutta Methods
- 2-stage Lobatto IIIA-IIIB—inconsistent;
- 3-stage Lobatto IIIA-IIIB—convergent of order 2; and
- 4-stage Lobatto IIIA-IIIB—convergent of order 2.
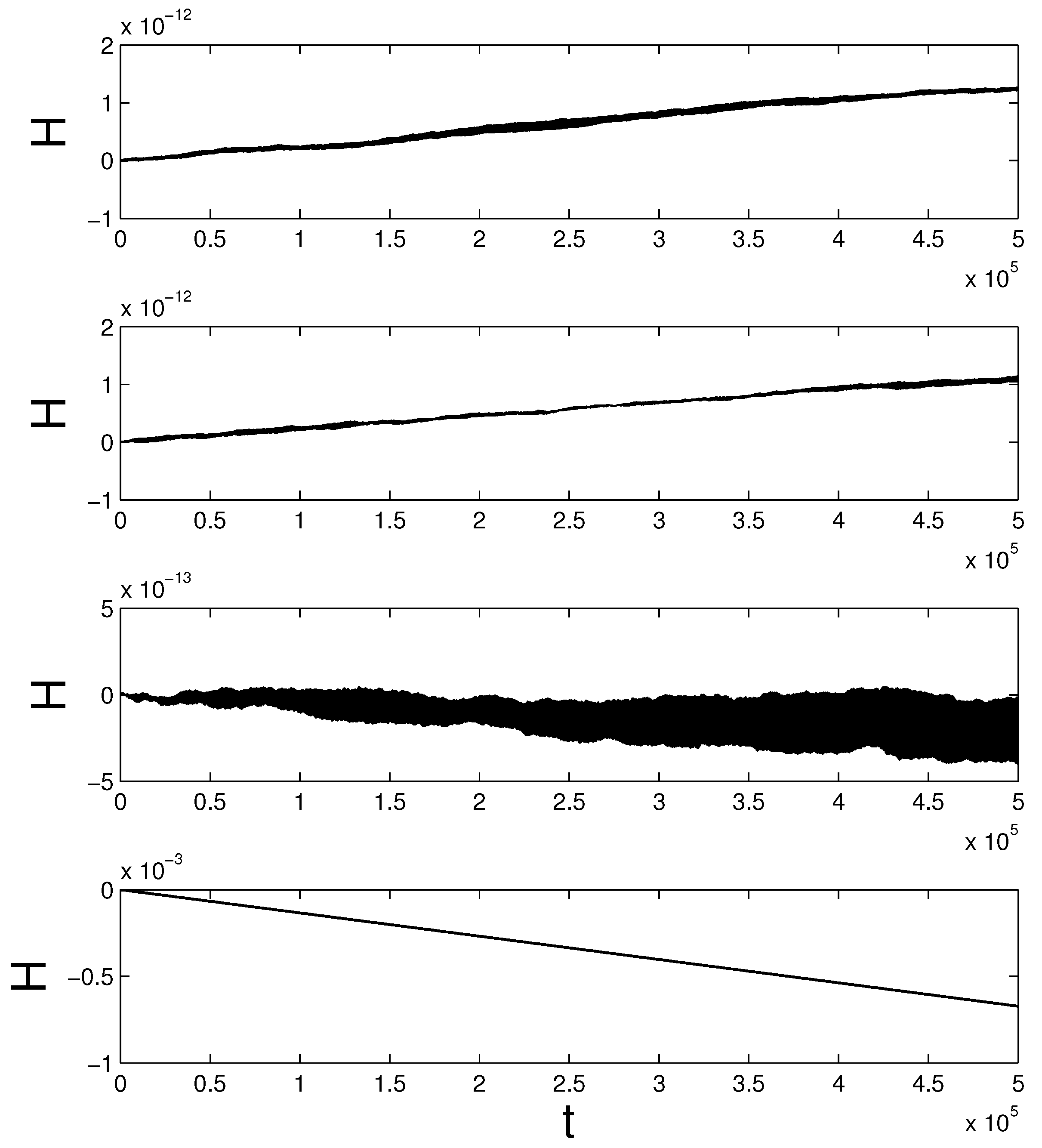
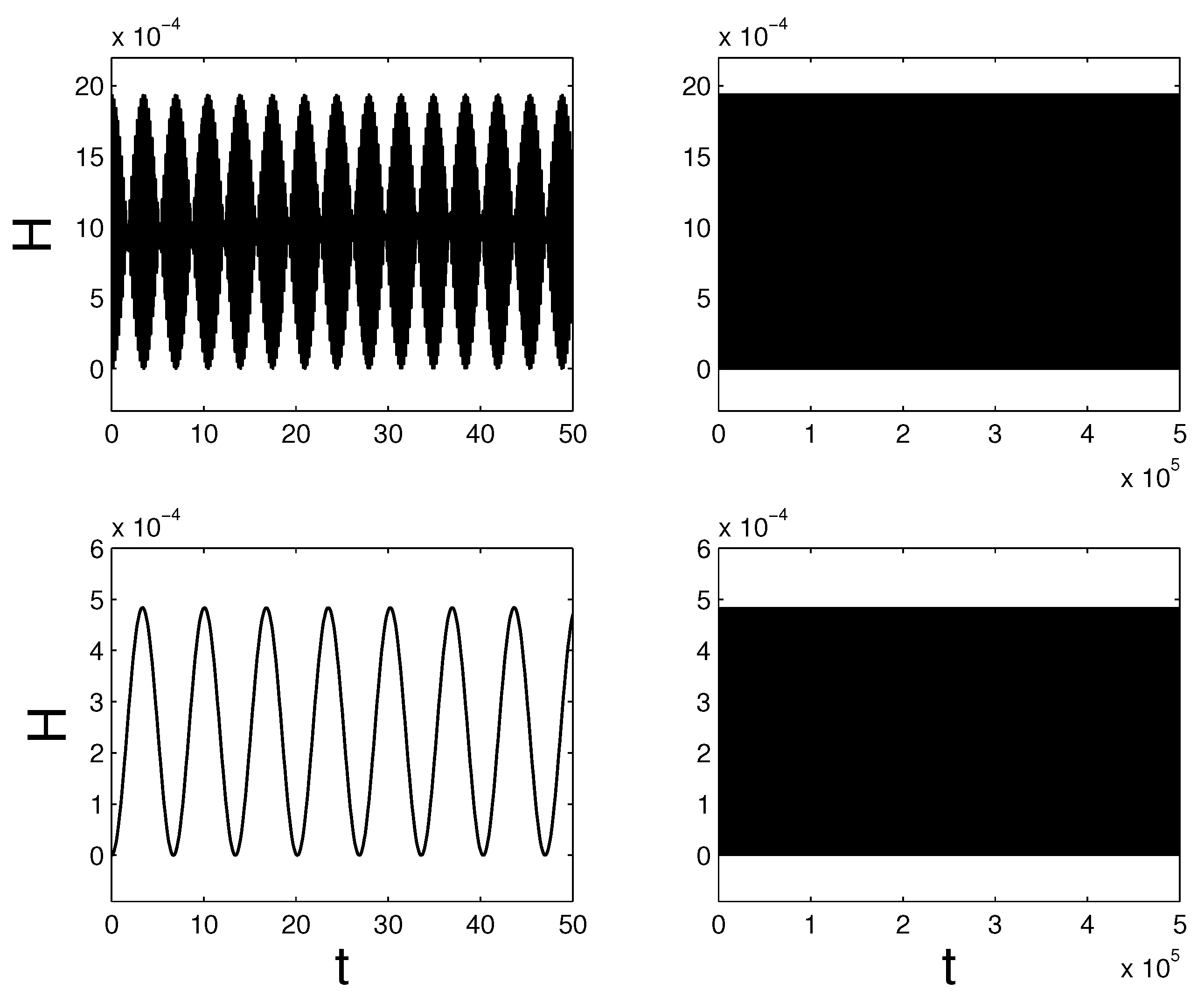
5. Numerical Experiments
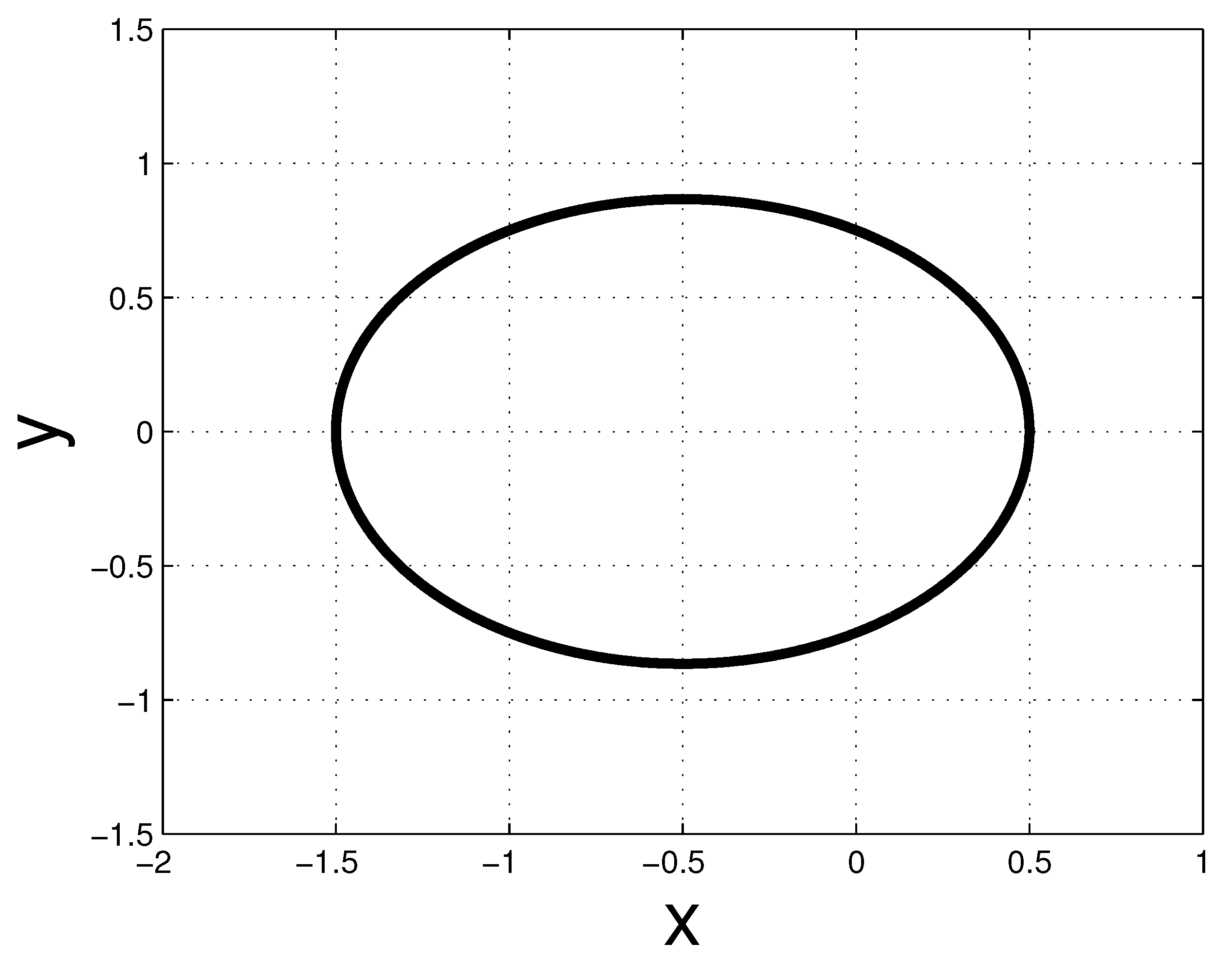
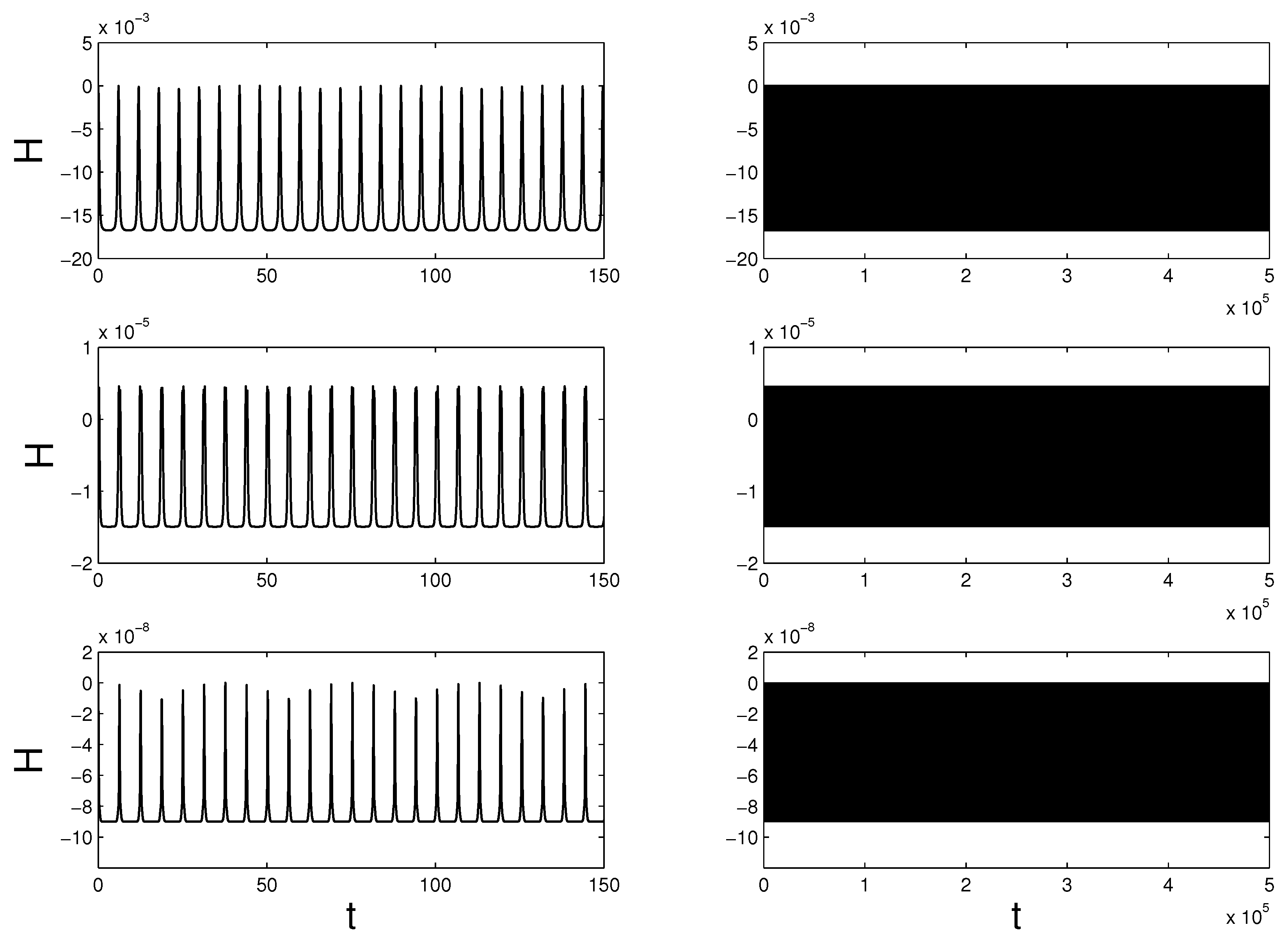
5.1. Kepler’s Problem
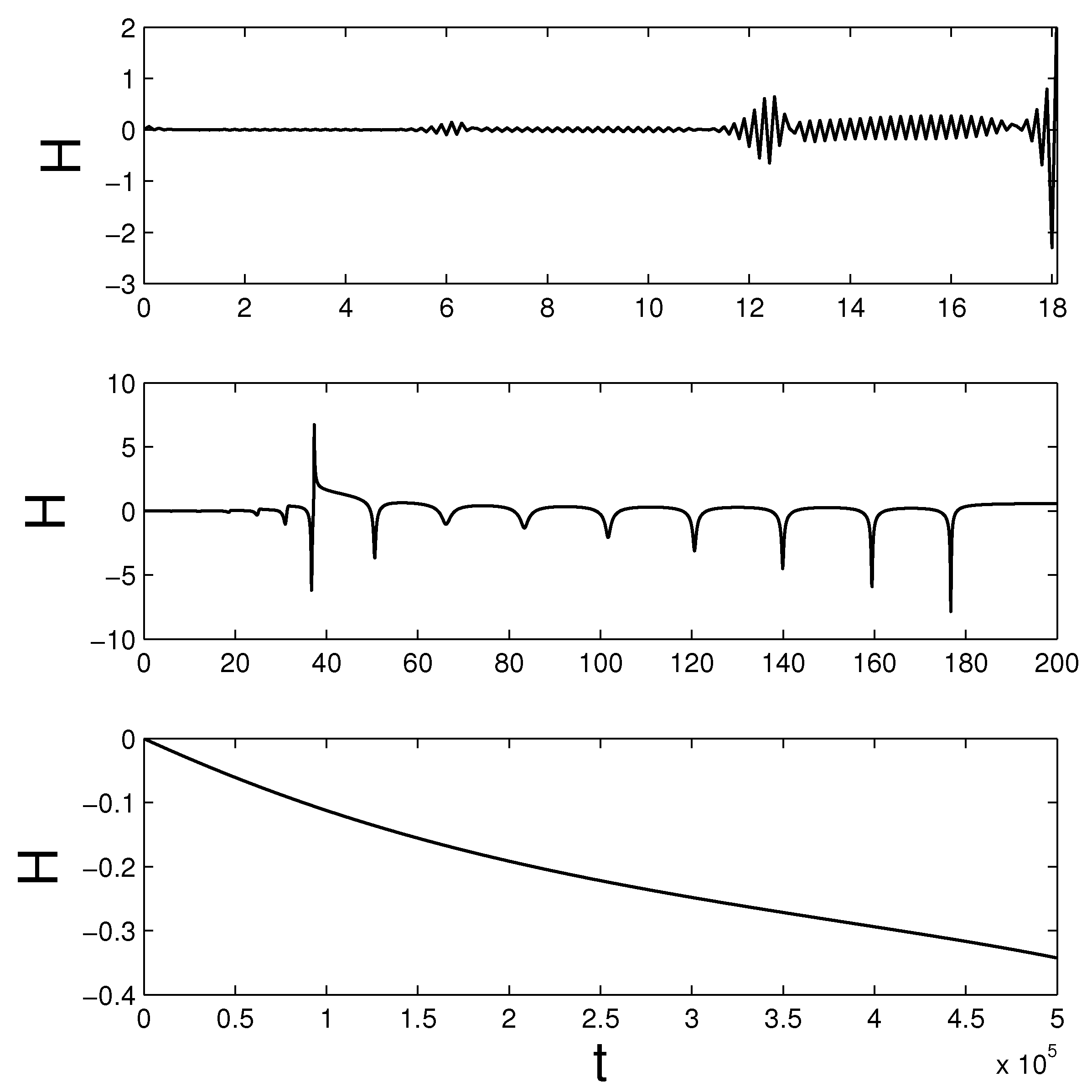
5.2. Point Vortices
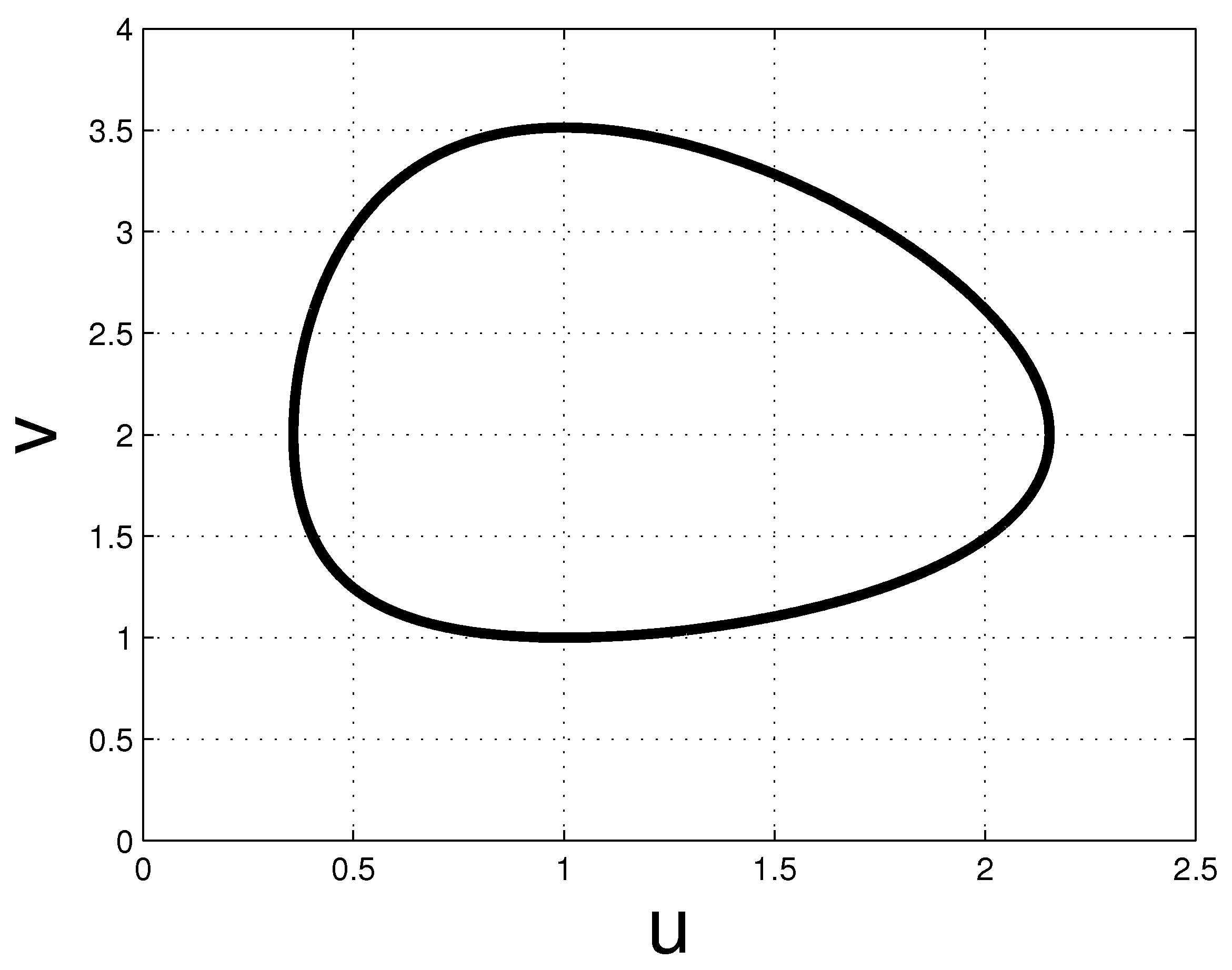
5.3. Lotka–Volterra Model
6. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations; Springer Series in Computational Mathematics; Springer: New York, NY, USA, 2002. [Google Scholar]
- McLachlan, R.I.; Quispel, G.R.W. Geometric integrators for ODEs. J. Phys. A Math. Gen. 2006, 39, 5251–5285. [Google Scholar] [CrossRef] [Green Version]
- Sanz-Serna, J.M. Symplectic integrators for Hamiltonian problems: an overview. Acta Numer. 1992, 1, 243–286. [Google Scholar] [CrossRef]
- Marsden, J.E.; West, M. Discrete mechanics and variational integrators. Acta Numer. 2001, 10, 357–514. [Google Scholar] [CrossRef] [Green Version]
- Bou-Rabee, N.; Owhadi, H. Stochastic variational integrators. IMA J. Numer. Anal. 2009, 29, 421–443. [Google Scholar] [CrossRef]
- Bou-Rabee, N.; Owhadi, H. Stochastic Variational Partitioned Runge-Kutta Integrators for Constrained Systems. arXiv 2007, arXiv:0709.2222. [Google Scholar]
- Kraus, M.; Tyranowski, T.M. Variational integrators for stochastic dissipative Hamiltonian systems. arXiv 2019, arXiv:1904.06205. [Google Scholar]
- Hall, J.; Leok, M. Spectral Variational Integrators. Numer. Math. 2015, 130, 681–740. [Google Scholar] [CrossRef]
- Holm, D.D.; Tyranowski, T.M. Variational principles for stochastic soliton dynamics. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 2016, 472. [Google Scholar] [CrossRef]
- Holm, D.D.; Tyranowski, T.M. Stochastic discrete Hamiltonian variational integrators. BIT Numer. Math. 2018, 58, 1009–1048. [Google Scholar] [CrossRef] [Green Version]
- Jay, L.O. Structure Preservation for Constrained Dynamics with Super Partitioned Additive Runge–Kutta Methods. SIAM J. Sci. Comput. 1998, 20, 416–446. [Google Scholar]
- Kane, C.; Marsden, J.E.; Ortiz, M.; West, M. Variational integrators and the Newmark algorithm for conservative and dissipative mechanical systems. Int. J. Numer. Methods Eng. 2000, 49, 1295–1325. [Google Scholar] [CrossRef]
- Leok, M.; Shingel, T. General techniques for constructing variational integrators. Front. Math. China 2012, 7, 273–303. [Google Scholar] [CrossRef] [Green Version]
- Leok, M.; Zhang, J. Discrete Hamiltonian variational integrators. IMA J. Numer. Anal. 2011, 31, 1497–1532. [Google Scholar] [CrossRef]
- Ober-Blöbaum, S. Galerkin variational integrators and modified symplectic Runge-Kutta methods. IMA J. Numer. Anal. 2017, 37, 375–406. [Google Scholar] [CrossRef]
- Ober-Blöbaum, S.; Saake, N. Construction and analysis of higher order Galerkin variational integrators. Adv. Comput. Math. 2015, 41, 955–986. [Google Scholar] [CrossRef]
- Rowley, C.W.; Marsden, J.E. Variational integrators for degenerate Lagrangians, with application to point vortices. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; Volume 2, pp. 1521–1527. [Google Scholar]
- Vankerschaver, J.; Leok, M. A novel formulation of point vortex dynamics on the sphere: Geometrical and numerical aspects. J. Nonlin. Sci. 2014, 24, 1–37. [Google Scholar] [CrossRef]
- Marsden, J.E.; Patrick, G.W.; Shkoller, S. Multisymplectic geometry, variational integrators, and nonlinear PDEs. Commun. Math. Phys. 1998, 199, 351–395. [Google Scholar] [CrossRef]
- Holm, D.D.; Tyranowski, T.M. New variational and multisymplectic formulations of the Euler–Poincaré equation on the Virasoro–Bott group using the inverse map. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 2018, 474. [Google Scholar] [CrossRef] [PubMed]
- Lew, A.; Marsden, J.E.; Ortiz, M.; West, M. Asynchronous variational integrators. Arch. Ration. Mech. Anal. 2003, 167, 85–146. [Google Scholar] [CrossRef]
- Pavlov, D.; Mullen, P.; Tong, Y.; Kanso, E.; Marsden, J.E.; Desbrun, M. Structure-preserving discretization of incompressible fluids. Phys. D Nonlinear Phenom. 2011, 240, 443–458. [Google Scholar] [CrossRef] [Green Version]
- Stern, A.; Tong, Y.; Desbrun, M.; Marsden, J.E. Variational integrators for Maxwell’s equations with sources. PIERS Online 2008, 4, 711–715. [Google Scholar] [CrossRef]
- Tyranowski, T.M.; Desbrun, M. R-Adaptive Multisymplectic and Variational Integrators. Mathematics 2019, 7, 642. [Google Scholar] [CrossRef]
- Gotay, M. Presymplectic Manifolds, Geometric Constraint Theory and the Dirac-Bergmann Theory of Constraints. Ph.D. Thesis, University of Maryland, College Park, MD, USA, 1979. [Google Scholar]
- Marsden, J.; Ratiu, T. Introduction to Mechanics and Symmetry. Texts in Applied Mathematics; Springer: New York, NY, USA, 1994; Volume 17. [Google Scholar]
- Newton, P. The N-Vortex Problem: Analytical Techniques; Applied Mathematical Sciences; Springer: New York, NY, USA, 2001; Volume 145. [Google Scholar]
- Ellison, C.L.; Finn, J.M.; Qin, H.; Tang, W.M. Development of variational guiding center algorithms for parallel calculations in experimental magnetic equilibria. Plasma Phys. Control. Fusion 2015, 57, 054007. [Google Scholar] [CrossRef]
- Ellison, C.L. Development of Multistep and Degenerate Variational Integrators for Applications in Plasma Physics. Ph.D. Thesis, Princeton University, Princeton, NJ, USA, 2016. [Google Scholar]
- Ellison, C.L.; Finn, J.M.; Burby, J.W.; Kraus, M.; Qin, H.; Tang, W.M. Degenerate variational integrators for magnetic field line flow and guiding center trajectories. Phys. Plasmas 2018, 25, 052502. [Google Scholar] [CrossRef] [Green Version]
- Qin, H.; Guan, X. Variational Symplectic Integrator for Long-Time Simulations of the Guiding-Center Motion of Charged Particles in General Magnetic Fields. Phys. Rev. Lett. 2008, 100, 035006. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qin, H.; Guan, X.; Tang, W.M. Variational symplectic algorithm for guiding center dynamics and its application in tokamak geometry. Phys. Plasmas 2009, 16, 042510. [Google Scholar] [CrossRef]
- Faou, E. Geometric Numerical Integration and Schrödinger Equations; Zurich Lectures in Advanced Mathematics; European Mathematical Society: Zürich, Switzerland, 2012. [Google Scholar]
- Drazin, P.; Johnson, R. Solitons: An Introduction; Cambridge Computer Science Texts; Cambridge University Press: Cambridge, UK, 1989. [Google Scholar]
- Gotay, M. A multisymplectic approach to the KdV equation. In Differential Geometric Methods in Theoretical Physics; NATO Advanced Science Institutes Series C: Mathematical and Physical Sciences; Springer: Dordrecht, The Netherlands, 1988; Volume 250, pp. 295–305. [Google Scholar]
- Camassa, R.; Holm, D.D. An integrable shallow water equation with peaked solitons. Phys. Rev. Lett. 1993, 71, 1661–1664. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Camassa, R.; Holm, D.D.; Hyman, J. A new integrable shallow water equation. Adv. App. Mech. 1994, 31, 1–31. [Google Scholar]
- Ergenç, T.; Karasözen, B. Poisson integrators for Volterra lattice equations. Appl. Numer. Math. 2006, 56, 879–887. [Google Scholar] [CrossRef] [Green Version]
- Karasözen, B. Poisson integrators. Math. Comput. Model. 2004, 40, 1225–1244. [Google Scholar] [CrossRef]
- Suris, Y.B. Integrable discretizations for lattice system: local equations of motion and their Hamiltonian properties. Rev. Math. Phys. 1999, 11, 727–822. [Google Scholar] [CrossRef]
- Hairer, E.; Wanner, G. Solving Ordinary Differential Equations II: Stiff and Differential-Algebraic Problems, 2nd ed.; Springer Series in Computational Mathematics; Springer: Berlin, Gremany, 1996; Volume 14. [Google Scholar]
- Lubich, C. Integration of stiff mechanical systems by Runge-Kutta methods. Zeitschrift für Angewandte Mathematik und Physik ZAMP 1993, 44, 1022–1053. [Google Scholar] [CrossRef] [Green Version]
- Rabier, P.J.; Rheinboldt, W.C. Theoretical and Numerical Analysis of Differential-Algebraic Equations. In Handbook of Numerical Analysis; Ciarlet, P.G., Lion, J.L., Eds.; Elsevier Science B.V.: Amsterdam, The Netherlands, 2002; Volume 8, pp. 183–540. [Google Scholar]
- Hairer, E.; Nørsett, S.; Wanner, G. Solving Ordinary Differential Equations I: Nonstiff Problems, 2nd ed.; Springer Series in Computational Mathematics; Springer: Berlin, Germany, 1993; Volume 8. [Google Scholar]
- Hairer, E.; Lubich, C.; Roche, M. The Numerical Solution of Differential-algebraic Systems by Runge-Kutta Methods; Lecture Notes in Math. 1409; Springer: Berlin, Germany, 1989. [Google Scholar]
- Brenan, K.; Campbell, S.; Petzold, L. Numerical Solution of Initial-Value Problems in Differential-Algebraic Equations; Classics in Applied Mathematics; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1996. [Google Scholar]
- Faddeev, L.; Jackiw, R. Hamiltonian reduction of unconstrained and constrained systems. Phys. Rev. Lett. 1988, 60, 1692–1694. [Google Scholar] [CrossRef] [PubMed]
- Vermeeren, M. Modified equations for variational integrators applied to Lagrangians linear in velocities. J. Geom. Mech. 2019, 11, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Kraus, M. Projected Variational Integrators for Degenerate Lagrangian Systems. arXiv 2017, arXiv:1708.07356. [Google Scholar]
- Tyranowski, T.M. Geometric Integration Applied to Moving Mesh Methods and Degenerate Lagrangians. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2014. [Google Scholar]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tyranowski, T.M.; Desbrun, M. Variational Partitioned Runge–Kutta Methods for Lagrangians Linear in Velocities. Mathematics 2019, 7, 861. https://doi.org/10.3390/math7090861
Tyranowski TM, Desbrun M. Variational Partitioned Runge–Kutta Methods for Lagrangians Linear in Velocities. Mathematics. 2019; 7(9):861. https://doi.org/10.3390/math7090861
Chicago/Turabian StyleTyranowski, Tomasz M., and Mathieu Desbrun. 2019. "Variational Partitioned Runge–Kutta Methods for Lagrangians Linear in Velocities" Mathematics 7, no. 9: 861. https://doi.org/10.3390/math7090861
APA StyleTyranowski, T. M., & Desbrun, M. (2019). Variational Partitioned Runge–Kutta Methods for Lagrangians Linear in Velocities. Mathematics, 7(9), 861. https://doi.org/10.3390/math7090861