1. Introduction
The identification and the analysis of correlations between human movement performance and motion parameters is of a considerable importance for both scientists and athletes and is the issue of a huge number of biomechanical studies [
1,
2,
3].
In cycling, pedalling rate significantly affects rider energy expenditure and consequently the overall performance. The metabolic energy cost (oxygen consumption), the muscular efforts, the leg joints torques, the negative muscle work, at a given power output, are all influenced by the pedalling cadence, typically with different optimal ranges. Several studies in the literature searched for an optimum criterion and most of them are based on the minimization of a specific cost function. The use of a cost function [
1,
4,
5] allows to quantify the movement cost by a single value obtained by substituting the values of several variables in a mathematical expression. Most common cost functions used in the biomechanics of cycling are based on the energy consumption [
6,
7,
8,
9], the muscle electrical activity (with electromyography, EMG) [
10], the leg joint moments (which bear some relation to the muscular effort) [
11,
12,
13], the negative muscle work [
14], neuromuscular fatigue-related quantities [
15] and the rating of perceived exertion (RPE) during cycling [
16,
17]. Seabury [
6] and Marsh [
7] founded that the oxygen consumption for power outputs less than 200 W is minimized for cadences between 40 and 65 rpm; for power outputs of about 300 W the optimal range for oxygen consumption is between 70 and 80 rpm [
15,
18]. Furthermore, gross muscular efficiency (the oxygen consumption divided by the power output) for low/moderate effort intensities decreases with increasing pedalling rates [
19], while during high intensity cycling it remains almost constant with increasing pedalling rates. In [
20] Neptune et al. founded, for most of the tested subjects, a minimum in the summed iEMG across all muscles at the cadence of 90 rpm. A further analysis [
15], based on simulations, showed that at 90 rpm occurred the minimum of all nine neuromuscular quantities applied to the sum across muscles of individual activations (average, integrated and peak activation, average and peak force, average and peak stress, average and peak endurance). Redfield and Hull [
11] and Marsh et al. [
13] examined in detail the relation between cadence and leg joint moments at constant power. A cost function based on the average of the absolute leg joint moments during a pedalling cycle was proposed and validated by experimental data. The optimum resulting from these studies corresponds to cadences in the neighbourhood of 90-100 rpm increasing with the power output. From the study of Neptune in [
14] emerged that at pedalling cadences higher than 90 rpm the negative muscle work increases, with the consequent decreasing of muscular efficiency. In [
17], Jameson obtained that cadence does not affect significantly central sensations and a minimum in the muscle pain ratings at about 70 rpm.
Therefore, optimal cadence actually depends on which criterion is considered. Furthermore, each cyclist freely chooses a cadence depending on a series of peculiar physiological and environmental factors that makes the problem even more complex [
21]. As a consequence, it is not possible to determine an exact optimal rate of pedalling, whereas it can be defined a range of compromise between energy cost and muscular work optimum, within which each rider self-regulates his cadence [
22]. A confirmation of this is the well-known experimental evidence that pedalling rates freely chosen by cyclists (85-100 rpm) are higher than metabolically optimum cadences (50–70 rpm), while the cadences that minimize the joint moments can be even higher (90–110 rpm) [
23]. In other words, the optimal cadence for a cyclist can be identified in a compromise between a minimum peripheral muscular force and a minimum metabolic cost.
In this work, it is analysed an alternative easy to evaluate cost function, based on an approximate maximum peak of muscular power exerted during a cycle, that can be converted in an equivalent global moment generated by the leg joints. To this aim, a kinetic method is used: the inverse dynamics problem is solved by an energetic formulation in order to find an approximate trend of the power law generated by the muscles. The advantage of the energetic approach, with respect to a Newton–Euler formulation, is due to the limited set of experimental data required, namely the power law applied to the crank during a cycle. In [
24], Neptune and Van den Bogert demonstrated that kinetic methods underestimate the mechanical energy expenditure of muscles, with errors of 24% in a simulation and of the 5% in a second simulation, due to the inability of such methods to account for co-contraction of antagonistic muscles during movement. In [
14] a quantification of the amount of negative muscular crank torque at different pedalling rate is investigated. From the study, performed at a power output of 260 W, it emerged that no negative muscle work was present at 60 rpm, a negligible amount at 75 and 90 rpm and substantial negative muscular crank torque was generated at 105 and 120 rpm. On the basis of these findings, it could be supposed that a kinetic approach at low pedalling rates can substantially allow to obtain muscular effort values close to the real ones, whereas at high pedalling frequencies it could underestimate the effective efforts. Therefore, it can provide optimal cadence values higher than those that minimize muscle effort, providing an upper limitation for the most convenient cadence range.
Biomechanical analysis of cycling movements can be carried out with two approaches: a standard inverse dynamics approach with simplified planar skeletal models [
11,
25] or musculoskeletal modelling combined with optimal control analysis by means of multibody biomechanical analysis software (OpenSim, Anybody, SIMM etc…) [
15,
26,
27,
28]. In the comparison, the first is characterized by a greater simplicity, a smaller number of parameters and input data to be identified, but a more limited number of quantities that can be calculated and a greater approximation. The second is a powerful method to study multi-joints movements with respect to individual muscle mechanics and energetics, providing considerable information on system individual muscle kinetics and kinematics, but the number of parameters that have to be identified and the complexity are significantly higher. With the aim of studying a methodology that allows to identify the limits of the most convenient pedalling cadences with a method that is simple to implement, we have chosen to follow the first approach.
Two formulations of the dynamic problem (the first based on Newton–Euler equations, the second on the power flow balance) are implemented in order to define two different cost functions: the first, called Moment based Cost Function (MCF), is the one inherited from [
11,
13]; the second, proposed by the authors, is the Equivalent Moment based Cost Function (EMCF). A series of simulations on six hypothetical athletes confirm that the model based on EMCF gives similar results with the MCF method, which is considered to be a term of comparison well established in literature and supported by experimental evidence. Data from simulations are also used for a polynomial regression that allows to obtain an easy approximated formula. Then, a series of tests have been performed in the field, collecting data that confirms the validity of the proposed model. The novel EMCF cost function is able to identify the upper limit of the range of more convenient cadences (henceforth
), similarly to other established methods based on the average of the absolute leg joint moments, but with the advantage of a simpler formulation and an easier calculation method. A comparison is made between the values of the cost function (MCF) obtained with the kinetic method and those of the EMCF cost function to verify the validity of the proposed approach. Subsequently an analysis of the dependence between
and power and body mass index is carried out, identifying an approximate polynomial form relationship of this dependence. Finally, experimental tests are conducted to compare the
obtained with the EMCF cost function and the cadences chosen by competitive cyclists for different power levels.
Focusing on the general approach and methodology, this paper offers an example on how mathematical models and numerical methods can be exploited to perform a model-based study of a biomechanical problem. Thus, the paper is in line with the aim of this Special Issue (Mathematical Modeling in Biomechanics and Mechanobiology), where similar papers can be found [
29]. The article is structured as follows.
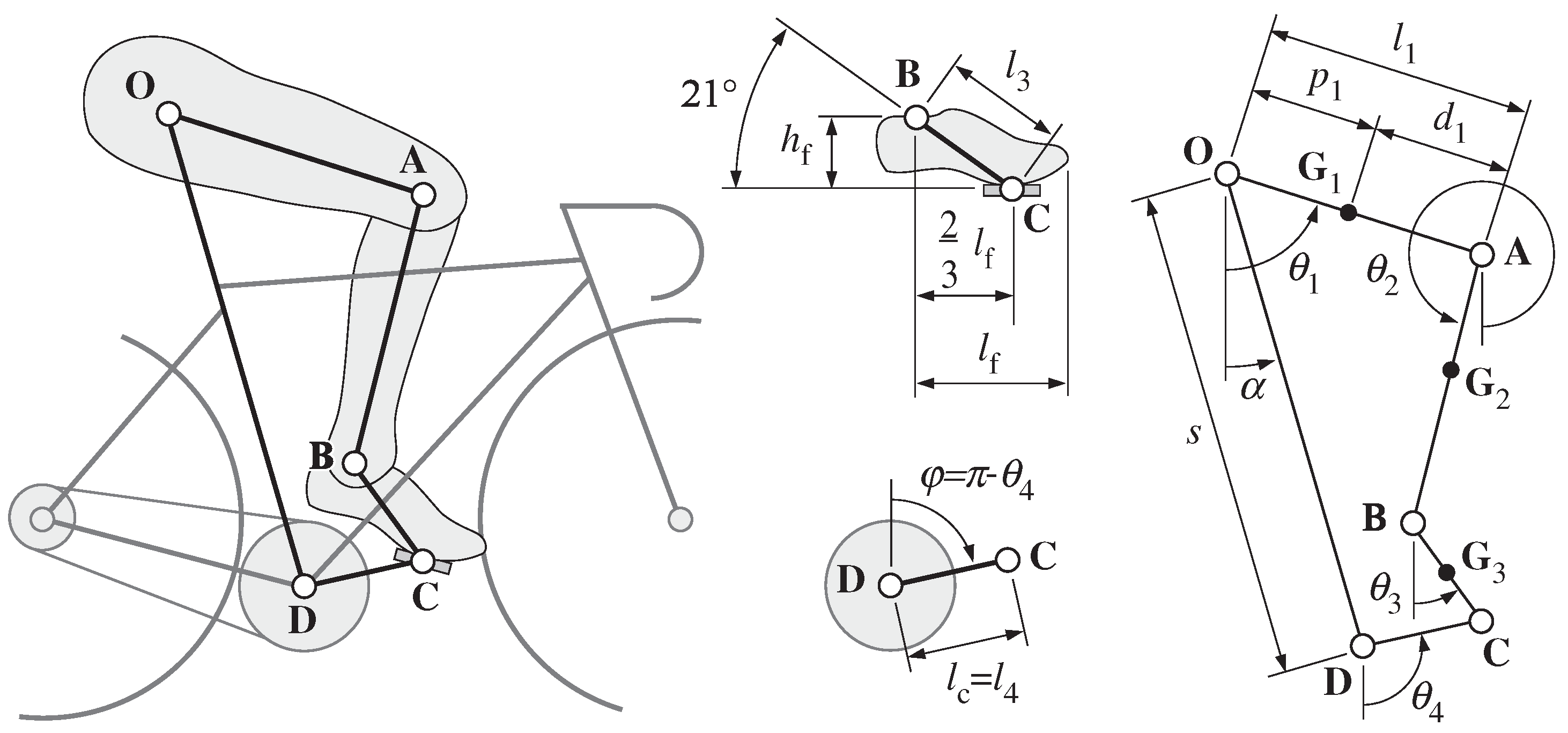
Section 2 is devoted to Methods and Materials, with a detailed description of the planar model used to formulate the kinematics and the dynamics of the pedalling, the equations of kinematics for position, velocity and acceleration, the equations of dynamics, the formulation of the cost functions MCF and EMCF and the experimental tests. Results, discussion and conclusions are provided in
Section 3,
Section 4 and
Section 5, respectively.
3. Results
In this section it is firstly given the comparison between MCF and EMCF when they are involved in the minimization problem; the comparison is done at increasing average power outputs, corresponding to increasing values of upper limit cadences.
Figure 5 shows the comparison between MCF and EMCF, plotted versus the pedalling cadence. Both cost functions have been normalized by their minimum value, so that
occurs when the CF is equal to 1. Plots, based on simulations, refers to a cyclist with
and
exerting a power output from 100 W to 400 W. Values of
are comparable in all cases, with greater values at increasing powers, as evidenced by experiments in literature [
23]. Therefore, it can be said that the minimization of the equivalent moment gives similar results with respect to the minimization of the approximated average muscular stress.
The study can be extended to different body characteristics: once the mass and the height are given, all the geometric and inertial properties of the kinematic and dynamic models can be obtained by means of a scaling procedure based on anthropocentric average factors [
32,
33]. As explained in
Section 2.2.2, also the power
applied to the crankset can be scaled on the basis of the imposed average power output. Thus, the upper limit of most convenient cadence rate has been investigated for a series of cases, ranging the mass from 50 to
, the body mass index (BMI) from 19 to
and the power output from 100 to
. Results are plotted in
Figure 6. Solid black lines are iso-height curves, while markers refer to six different professional riders considered for simulations; the three white markers, in particular refer to sprinters (sp), whereas black markers correspond to climbers (cl). It results clear from plots, as confirmed by the facts, that climbers have higher optimal cadences than sprinters. Furthermore, for all cyclists
increases for increasing powers. Anthropometric data of the six the simulated cyclists are collected in
Table 3, whereas
obtained with each one of the cost functions are reported in
Table 4. Results are comparable in all cases; the average error between the two methods is
, exceeding this value in few cases related to low power outputs (100 W).
Riders in s
Table 3 and
Table 4 are listed with a descending order of the index
I, defined as
, that it was found to correspond to an ascending ordering of
values. The correlation between
(hereafter always determined minimizing the EMCF) and the anthopometric index
I becomes even more evident in
Figure 7a: data obtained varying the index
I while keeping fixed a specified power
P substantially align on a straight line. Therefore, we can expect that a polynomial regression of
is possible. A satisfying approximation has been found using a polynomial form of the 1st order with respect to
I and of the 2nd order with respect to
P:
Values of coefficients
that give the best fit (least-square fitting) are collected in
Table 5, while a further graphical representation of Equation (
19) is given in
Figure 7b: the diagram provides the optimal cadence versus the power output
P for a discrete series of indexes
I. This result is of a certain interest since it becomes immediate for a cyclist to obtain an approximate estimate of the upper limit of the most convenient range of cadence in terms of muscular effort at a given power output.
As discussed in
Section 2.3, a series of tests have been performed on four competitive cyclist (
Table 2). Experimental data are collected in
Figure 8a. All subjects confirm the tendency of an increase in cadence due to an increase in power. A global view of the data is given in
Figure 8b, where trends and variation’s ranges of experimental data are shown; the average of the experimental data trend goes approximately from 70 rpm at 100 W to 90 rpm at 450 W, with a decreasing dispersion moving toward high power outputs. On the same figure it is plotted the range of cadence estimated by the EMCF minimization method applied to the tested subjects; values are higher than experimental data for all power outputs. Furthermore, experimental data obtained by [
6] are reported; such data represent cadences that minimize the oxygen uptake, i.e., the energy expenditure, calculated as the average of the three subjects tested by Seabury.
4. Discussion
The cost function proposed in this work resulted to be similar to those based on the absolute average joint moments, as presented in [
11]. In the same work it is shown how the joint moments can be divided into two parts, the first one called quasistatic moment, that produces positive work in order to counteract the resistant forces, the second one called kinematic moment, that is due to inertial terms and generates a null work in a cycle. The quasistatic moment decreases at high cadences, while the kinematic moment does the opposite. As a result, being the total moment the sum of the two components, an optimum can be found in the minimization of the MCF cost function.
The EMCF cost function is based on the peak of an equivalent moment obtained from the muscular power curve; such peak increases at high cadences due to a larger influence of the kinematic moments related to the inertial terms, whereas the peak increases at low cadences due to larger quasistatic moment components, in agreement to the analysis of Redfield and Hull [
11].
The approach followed in [
13] is similar: it is experimentally evaluated the absolute average joint moment (comparable to the MCF) during a cycle; different groups of participants pedalling at increasing imposed frequencies and powers are analysed. Basically, it emerges that the minimum of the average moment occurs at cadences that are comparable to those obtained with the minimization of EMCF. Furthermore, the values of the optimal cadences increase with the power, as evidenced in the present study. The same paper shows how the pedalling rate freely chosen by the participants is in general similar but different from the cost function minimum. Moreover, cadences preferred by participants are nearly constant varying the power, exhibiting also a significantly large variance. This aspect confirm the considerations made by [
21,
22], i.e., that the preferred cadence is determined by a very complex combination of factors. Among them, however, the minimization of the muscular effort can be considered one of the most influencing. This minimization, by approximating the muscular effort through a kinematic approach, can can be used to estimate the upper limit of the optimal range of cadence for a cyclist, whereas the lower limit can be found considering the minimization of the energy consumption.
With the increase of the pedalling frequency the negative muscular work increases [
14]. On the other hand as the output power increases the most convenient cadence increases; consequently, considering the combined effect of these two behaviours, it is expected that the difference between the value of
and the cadence chosen by cyclists increases with power.
Experimental data obtained in this work, notwithstanding a certain dispersion and variability, give evidence to previous considerations. The analysis of data shows that the dispersion is mainly attributable to subjects FF and FC. A reason can be found in a change of gear ratio between low and high power exercises, resulting in a discontinuity that gives an “S” shape to the plot. Subjects CS and GM do not show such trend: in these cases data fit with high accuracy with a linear law. Aggregate data are well represented by the linear fit of
Figure 8b; as supposed, cadences adopted by cyclists are placed in the central area, between cadences that minimize the muscular effort (EMCF minimization) and cadences that minimize the energy expenditure (data from Seabury [
6]).
5. Conclusions
Far from the claim of finding the cadence corresponding to the one freely chosen by a cyclist, the ambition of the present study was definitely to create a model that can be easily identified and verified in laboratory and that can offer practical indications also in field activities. Through the model it is possible to obtain an upper limitation of the range of cadences which are most convenient from the point of view of muscular effort. The optimum pedalling rate for a cyclist in a certain condition can be influenced by other factors (e.g., the metabolic cost or the maximum speed), the muscular work criterion returns a useful indication that the rider can consider at any rate to monitor his exercise.
The advantages of the approach proposed in this work is due to a simple mathematical formulation that requires few experimental data as input. The validity of the method is proved referring to data and methods available from other studies. A series of experimental tests confirmed that the EMCF method can be used to identify the upper limit of the optimal cadence range, whereas the lower limit can be obtained by other methods based on the minimization of the energy consumption.
In order to give more strength to the evidences outlined in this study future works will concern the project of a dedicated test bench that will be used to give a deeper experimental validation of the EMCF by means of a wide campaign of tests, varying both the characteristics of the participants and the setup or the type of bicycle. Furthermore, on the basis of a validation procedure based on a significant number of experimental measurements, it could be possible to think of introducing a correction term within the proposed model, in order to obtain in a simple way an estimate of the optimal cadence from the point of view of muscular effort.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}