Adaptive Output Synchronization of General Complex Dynamical Network with Time-Varying Delays


{kind=link}
Abstract
:1. Introduction
- (i).
- An appropriate adaptive output feedback synchronize problem is successfully solved for every cell output of general complex networks with time-varying delays.
- (ii).
- Based on the invariant principle of functional differential equations, the feedback controller and parameter update laws are constructed for a large-scale network with uncertainties. In addition, the general complex delayed network can achieve synchronization by adaptively adjusting their feedback gains.
- (iii).
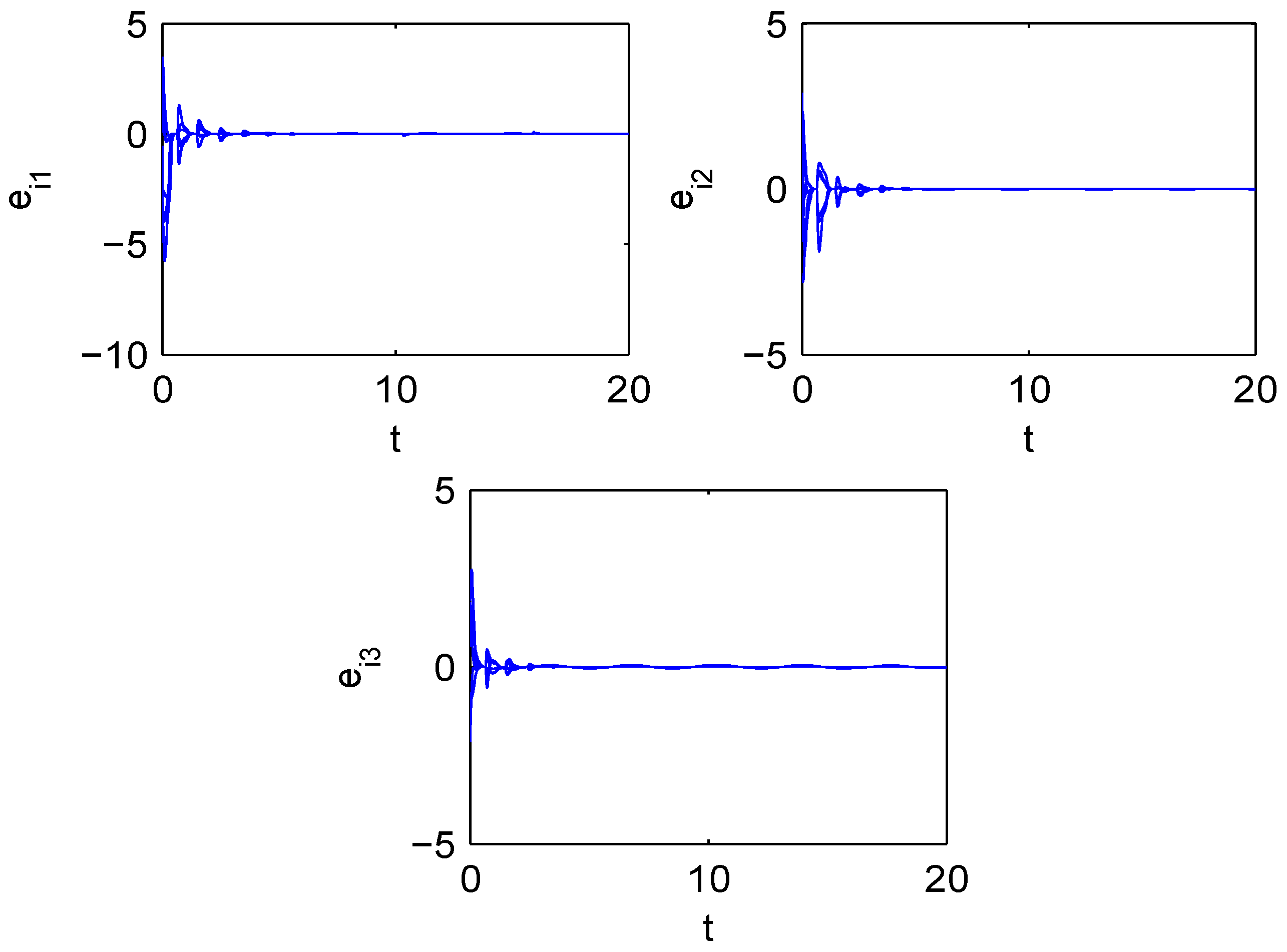
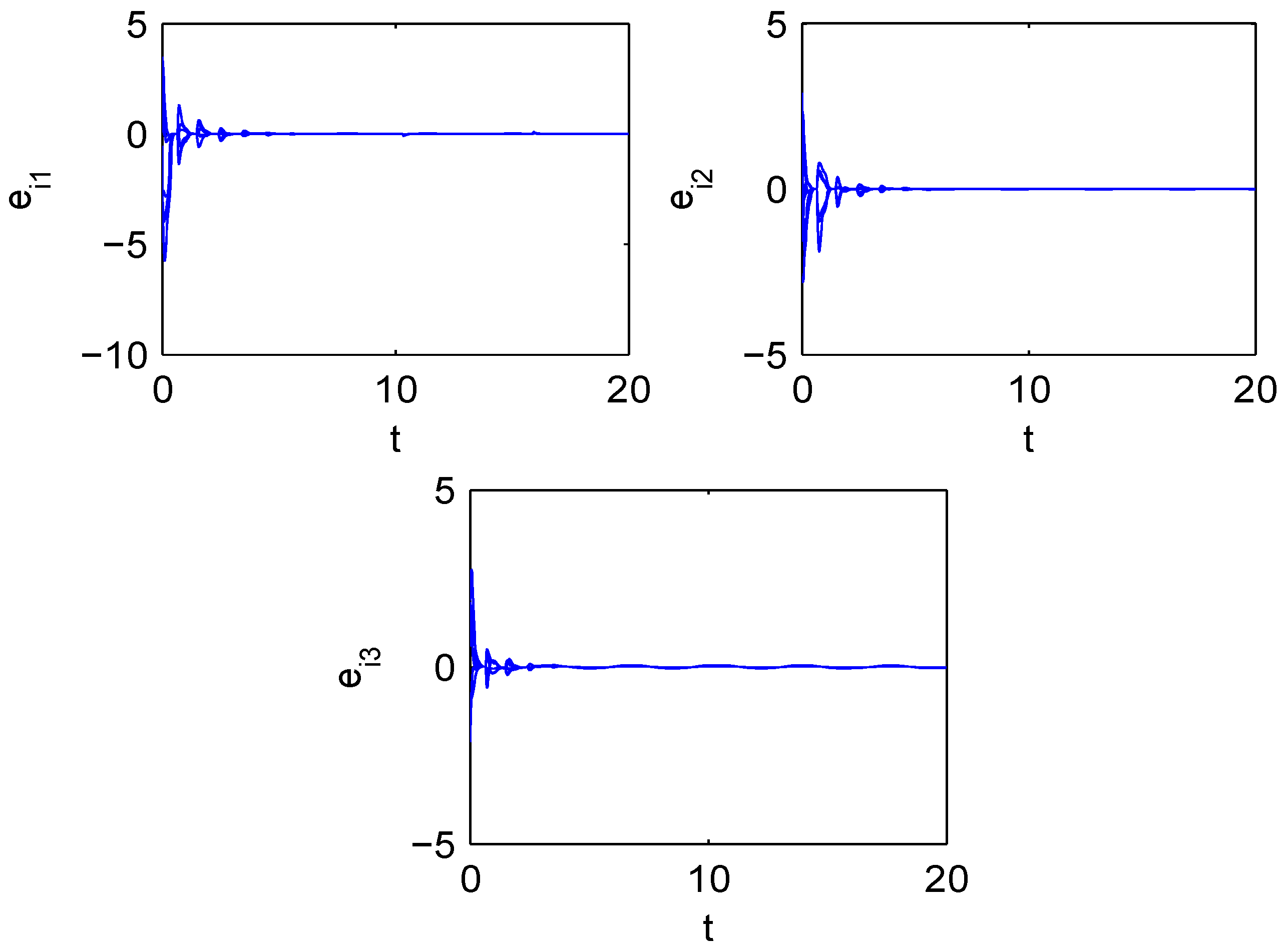
- Numerical examples are presented to demonstrate the effectiveness of the control scheme. Compared with the state-feedback case, the output synchronization of the general complex dynamical network is closer to the real application.
2. Preliminaries and Model Description
3. Output Synchronization in Complex Delayed Networks
- (1)
- If , it is easy to select .
- (2)
- If , one can select which is satisfied
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Watts, D.J.; Strogatz, S.H. Collective dynamics of small world networks. Nature 1998, 393, 440–442. [Google Scholar] [CrossRef] [PubMed]
- Barabasi, A.L.; Albert, R. Emergence of scaling in random networks. Science 1999, 286, 509–512. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, G.R.; Wang, X.F.; Li, X. Intruduction to Complex Networks: Nodels, Structures and Dynamics; Higher Education Press: Beijing, China, 2015. [Google Scholar]
- Wang, X.F.; Chen, G.R. Synchronization in scale-free dynamical networks: Robustness and fragility. IEEE Trans. Circuit Syst. 2002, 49, 54–62. [Google Scholar] [CrossRef]
- Mata-Machuca, J.L.; Ricardo, A.L. Adaptative synchronization in multi-output fractional-order complex dynamical networks and secure communications. Eur. Phys. J. Plus 2018, 133, 14. [Google Scholar] [CrossRef]
- Lu, J.H.; Chen, G.R. A time-varying complex dynamical network model and its controlled synchronization criteria. IEEE Trans. Autom. Control 2005, 50, 841–846. [Google Scholar]
- Zhou, J.; Chen, T. Synchronization in general complex delayed dynamical networks. IEEE Trans. Circuit Syst. 2006, 53, 733–744. [Google Scholar] [CrossRef]
- Yu, T.H.; Cao, D.Q.; Yang, Y.; Liu, S.Q.; Huang, W.H. Robust synchronization of impulsively coupled complex dynamical network with delayed nonidentical nodes. Chaos Solitons Fractals 2016, 87, 92–101. [Google Scholar] [CrossRef]
- Liu, J.B.; Zhao, J.; Zhu, Z.X.; Cao, J.D. On the Normalized Laplacian and the Number of Spanning Trees of Linear Heptagonal Networks. Mathematics 2019, 7, 314. [Google Scholar] [CrossRef] [Green Version]
- Rajchakit, G.; Pratap, A.; Raja, R.; Cao, J.D.; Alzabut, J.; Huang, C.X. Hybrid Control Scheme for Projective Lag Synchronization of Riemann-Liouville Sense Fractional Order Memristive BAM NeuralNetworks with Mixed Delays. Mathematics 2019, 7, 759. [Google Scholar] [CrossRef] [Green Version]
- Song, C.; Fei, S.M.; Cao, J.D.; Huang, C.X. Robust Synchronization of Fractional-Order Uncertain Chaotic Systems Based on Output Feedback Sliding Mode Control. Mathematics 2019, 7, 599. [Google Scholar] [CrossRef] [Green Version]
- Tang, Z.; Park, J.H.; Lee, T.H.; Feng, J. Mean square exponential synchronization for impulsive coupled neural networks with time-varying delays and stochastic disturbances. Complexity 2016, 20, 190–202. [Google Scholar] [CrossRef]
- Wang, Y.W.; Wei, Y.W.; Liu, X.K.; Zhou, N.; Cassandras, C.G. Optimal persistent monitoring using second-order agents with physical constraints. IEEE Trans. Autom. Control 2018, 64, 3239–3252. [Google Scholar] [CrossRef]
- Gao, Q.L.; Fan, C.X.; Ke, L.; Zhou, Y.J. Synchronization in general complex dynamical network with inner-coupling faults. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 7143–7147. [Google Scholar]
- Guan, Y.; Wu, Y.Q.; Wu, H.; Li, Y.Z.; He, S.H. Synchronization of Complex Dynamical Networks with Actuator Saturation by Using Sampled-Data Control. Circuits Syst. Signal Process. 2019, 38, 5508–5527. [Google Scholar] [CrossRef]
- Wen, G.H.; Yu, W.W.; Chen, M.Z.Q.; Yu, X.H. Pinning a Complex Network to Follow a Target System with Predesigned Control Inputs. IEEE Trans. Syst. Man Cybern. Syst. 2018, 99, 1–12. [Google Scholar] [CrossRef]
- AKumari, S.; Chugh, R.; Cao, J.D.; Huang, C.X. Multi Fractals of Generalized Multivalued Iterated Function Systems in b-Metric Spaces with Applications. Mathematics 2019, 7, 967. [Google Scholar] [CrossRef] [Green Version]
- Min, F.H.; Ma, H.Y.; Lv, Y.M.; Zhang, L. The coexistence of chaotic synchronization with three different nonautonomous systems under constraint conditions. Eur. Phys. J. Special Top. 2019, 228, 1493–1514. [Google Scholar] [CrossRef]
- Chen, J.Y.; Min, F.H.; Lv, Y.M.; Ye, B.M. Projective Synchronization for Heterogeneous Active Magnetic Controlled Memristor-Based Chaotic Systems. In Proceedings of the 17th International Symposium on Distributed Computing and Applications for Business Engineering and Science, Nancy, France, 4–6 July 2018; pp. 64–67. [Google Scholar]
- Dong, H.L.; Zhou, J.M.; Wang, B.C.; Xiao, M.Q. Synchronization of Nonlinearly and Stochastically Coupled Markovian Switching Networks via Event-Triggered Sampling. IEEE Trans. Neural Netw. Learn. Syst. 2018, 99, 1–10. [Google Scholar] [CrossRef]
- Yuan, X.X.; Li, J.J. Synchronization of T-S fuzzy complex dynamical networks with unknown topological structure and distributed time-varying delay. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 975–979. [Google Scholar]
- Yu, M.; Shang, W.P.; Chen, Z.G. Exponential Synchronization for Second-Order Nodes in Complex Dynamical Network with Communication Time Delays and Switching Topologies. J. Control Sci. Eng. 2017. [Google Scholar] [CrossRef]
- Duan, N.; Min, H.F.; Shu, Z.; Wang, S.L. A combined NN and dynamic gain-based approach to further stabilize nonlinear time-delay systems. Neural Comput. Appl. 2019, 31, 2183–2193. [Google Scholar] [CrossRef]
- Li, X.D.; Yang, X.Y.; Song, S.J. Lyapunov conditions for finite-time stability of time-varying time-delay systems. Automatica 2019, 103, 135–140. [Google Scholar] [CrossRef]
- Li, X.D.; Wu, J.H. Stability of nonlinear differential systems with state-dependent delayed impulses. Automatica 2016, 64, 63–69. [Google Scholar] [CrossRef]
- Yang, X.Y.; Li, X.D. Finite-time stability of linear non-autonomous systems with time-varying delays. Adv. Differ. Equ. 2018, 101, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Su, L.; Ye, D.; Yang, X. Dissipative-based sampled-data synchronization control for complex dynamical networks with time-varying delay. J. Franklin Inst. 2017, 354, 6855–6876. [Google Scholar] [CrossRef]
- Que, H.Y.; Fang, M.; Wu, Z.G.; Su, H.Y. Exponential Synchronization via Aperiodic Sampling of Complex Delayed Networks. IEEE Trans. Syst. Man Cybern. Syst. 2018, 99, 1–9. [Google Scholar] [CrossRef]
- Alsaedi, A.; Usha, M.; Ali, M.S.; Ahmad, B. Finite-time synchronization of sampled-data Markovian jump complex dynamical networks with additive time-varying delays based on dissipative theory. J. Comput. Appl. Math. 2020, 368, 112578. [Google Scholar] [CrossRef]
- Huang, D. Synchronization-based estimation of all parameters of chaotic systems from time series. Phys. Rev. E. 2004, 69, 067201. [Google Scholar] [CrossRef] [PubMed]
- Hale, J.K. Theory of Functional Differential Equation; Springer: New York, NY, USA, 1977. [Google Scholar]
- Sparrow, C. The Lorenz Equations: Bifurations, Chaos and Strange Attractors; Springer: New York, NY, USA, 1982. [Google Scholar]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gan, L.; Li, S.; Duan, N.; Kong, X. Adaptive Output Synchronization of General Complex Dynamical Network with Time-Varying Delays. Mathematics 2020, 8, 311. https://doi.org/10.3390/math8030311
Gan L, Li S, Duan N, Kong X. Adaptive Output Synchronization of General Complex Dynamical Network with Time-Varying Delays. Mathematics. 2020; 8(3):311. https://doi.org/10.3390/math8030311
Chicago/Turabian StyleGan, Liangzhi, Shuo Li, Na Duan, and Xiangyong Kong. 2020. "Adaptive Output Synchronization of General Complex Dynamical Network with Time-Varying Delays" Mathematics 8, no. 3: 311. https://doi.org/10.3390/math8030311
APA StyleGan, L., Li, S., Duan, N., & Kong, X. (2020). Adaptive Output Synchronization of General Complex Dynamical Network with Time-Varying Delays. Mathematics, 8(3), 311. https://doi.org/10.3390/math8030311