1. Introduction
Earth’s climate has varied drastically over long time scales, cycling between warmer interglacial periods and very cold glacial states (ice ages). The beginning of a glacial cycle is characterized by a slow descent into a much colder world, in which massive ice sheets advanced into North America and Eurasia, fed by the moisture resulting from a corresponding drop in sea level of about 350 feet [
1]. The ice ages are followed by a relatively rapid retreat into interglacial periods, leading to a sawtooth pattern evident in the paleoclimate data (
Figure 1).
While large-scale climate models are able to provide insight into glacial cycle dynamics [
2], the use of a comprehensive Earth System Model to accurately simulate even the last glacial cycle remains a challenge [
3]. As such, approaches such as the analysis of data from deep ocean sediment cores [
4] and Greenland and Antarctic ice cores [
5], and the use of
conceptual (or
low order, reduced) climate models, also play important roles in the investigation of climate phenomena associated with glacial cycles [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15]. As the time scales of related climate phenomena can differ to a great degree, conceptual models often involve a switching mechanism and nonsmooth model equations [
13,
16,
17,
18,
19,
20]. The model introduced here will contain a climate switching mechanism, leading to an associated nonsmooth geometric singular perturbation problem. We prove the existence of a unique attracting (nonsmooth) limit cycle that corresponds to the glacial-interglacial oscillations.
Numerous questions regarding the glacial cycles remain unanswered, beginning with those related to the frequency and amplitude of the oscillations. Many believe the pacing of the ice ages is related to changes in Earth’s orbital parameters, known as Milankovitch cycles [
21]. For example, the obliquity (or tilt) of the Earth’s spin axis has varied over the past 5 million years [
22] with a period of about 41 kyr. It is known that, between 3 and 1.2 million years ago, the glacial cycles oscillated with a dominant period of 41 kyr as well [
4].
Over the past 800 kyr, ice ages were of longer duration and the period of the glacial cycles grew to about 100 kyr, with the amplitude of the cycles increasing as well (
Figure 1). Interestingly, the eccentricity of the Earth’s orbit has varied over geologic time with a period of roughly 100 kyr. Understanding this change to larger amplitude, smaller frequency glacial cycles between 1200 and 800 thousand years ago—known as the Mid-Pleistocene Transition (MPT)—and the nature of the climate response to the external forcing provided by the Milankovitch cycles, continues as a major open problem in paleoclimate. From a dynamical systems perspective, a phenomenon such as the MPT is testament to the complexity of the climate system and the often nonlinear response of the climate system to external forcing.
Additional questions concern internal climate feedbacks and the possibility of self-sustained oscillations, which represent the main focus of this paper. Foremost among these from a conceptual modeling perspective is positive ice-albedo feedback. An expanding ice sheet leads to a higher albedo and reduced absorption of solar radiation, thereby reducing temperature and further enhancing growth of the ice sheet. Similarly, a retreating ice sheet leads to an increase in absorption of solar radiation and higher temperatures, contributing to further ice sheet loss.
The role of ice-albedo feedback as it relates to zonally averaged (by latitude) surface temperature was studied in the seminal work of Budyko [
7] and Sellers [
14] in 1969. Budyko’s surface temperature model was coupled with an ODE for the evolution of the edge of the ice sheet (known as the
ice line) in [
15], where it was shown the ice line either converges to a small stable ice cap equilibrium position or descends to the equator (with parameters aligned with the modern climate). The latter outcome is known as a runaway
snowball Earth episode.
The potential for self-sustained climate oscillations might arise via consideration of competing feedbacks associated with ice-albedo feedback [
8,
9]. For example, at the onset of a glacial age, a descending ice sheet leads to an increase in the surface temperature gradient, due to the increased albedo in the polar region. This leads to a positive feedback in that the poleward transport of heat and moisture by the atmosphere, with the moisture precipitating out as snow on the glacier, is enhanced, all things being equal [
23]. In this way, the ice sheet continues to grow.
A competing, negative feedback is that the efficiency of the meridional heat and moisture transport is decreased as the ice sheet advances. In the conceptual model setting, North [
24] proposed that the efficiency of the meridional transport might have two values, the smaller of which corresponds to the portion of the planet covered by ice. That is, a planet with extensive ice cover will be less efficient in the transport of heat and moisture poleward (also see [
25]). The thinking is that an increase in sea ice during a glacial advance serves to reduce heat advection in the oceans. Due to atmospheric-oceanic coupling, together with extensive sea ice, evaporation and the transport of moisture will each be impaired.
Similarly, as albedo decreases during a glacial retreat, the meridional temperature gradient weakens, impacting the poleward transport of moisture. However, the efficiency of the meridional transport might be assumed to increase as the sea ice retreats, with ocean advection and the coupling between the atmosphere and the ocean enhanced. Thus, the efficiency of the diffusive transport across latitudes can be viewed as a negative feedback with respect to ice sheet growth.
We investigate the interaction between this negative feedback and the positive temperature gradient feedback described above in the conceptual model, ODE setting. We do this in part by assuming the diffusive meridional transport efficiency parameter is smaller during a glacial advance, relative to that during a glacial retreat, due to the ice cover.
2. Results
We present a new conceptual model of the glacial cycles in which the latitudinal transport of heat is modeled as a diffusive process. The zonal surface temperature PDE is coupled to the ice line, as in [
15]. The spectral method is used to approximate the resulting infinite dimensional system with a finite system of ODEs. Standard invariant manifold theory [
26] is used to reduce this finite system to a single governing equation on a slow manifold, corresponding to the evolution of the edge of the ice sheet.
Consideration of ablation and accumulation zones on the ice sheet leads to the introduction of a second model variable, as in [
20]. The incorporation of a switching mechanism based on an ice sheet mass balance equation into this two-dimensional system, as described below, leads to a differential inclusion. Using Filippov’s approach to differential inclusions [
27], a unique attracting (nonsmooth) limit cycle is shown to exist, with the Contraction Mapping Theorem the major tool used in the proof. This periodic orbit, a consequence of the competing feedbacks discussed in the Introduction, represents internal, self-sustained climate oscillations.
Similar in spirit to Welander’s mixed ocean layer heat-salt oscillator [
28], two virtual equilibria play a fundamental role in the limit cycle produced here. Varying a model parameter leads to a type of nonsmooth Hopf bifurcation, arising as a border collision bifurcation, as is discussed along with additional bifurcation scenarios in the following.
It is of interest to note that forcing our model with variations in eccentricity and obliquity does not significantly affect the glacial-interglacial oscillations in a qualitative sense. The dynamics of this nonautonomous, nonsmooth model are presented below.
This paper is organized as follows. The model equations are derived in
Section 3. The switching mechanism and the set up of the Filippov flow are presented in
Section 4. The nonsmooth model flow is analyzed in
Section 5, in which the existence of a unique attracting limit cycle is proved. We revisit, and place within the context of the model, the competing feedbacks discussed above by considering the flux at the albedo line throughout the glacial cycle in
Section 6. We discuss bifurcations exhibited by the model in
Section 7, while the effect of forcing the model with Milankovitch cycles is presented in
Section 8. The concluding section contains comments pertaining to open questions, both of a mathematical nature and as they relate to Earth’s glacial cycles, that might be investigated in a conceptual fashion with our model.
4. The Flip-Flop and Associated Filippov Flow
The theory of ODEs with discontinuous vector fields continues to advance, often based on the work of Filippov [
27] and motivated in part by mathematical challenges arising in the modeling of systems that include phenomena such as switches and collisions [
43,
44]. In terms of our model, we preface the definition of the discontinuous vector field by first focusing on the diffusion coefficient
D, which appears in each of the functions
, in (
13). It follows that the function
in (
17) can be thought to be parametrized by
D. Recall that an increase in
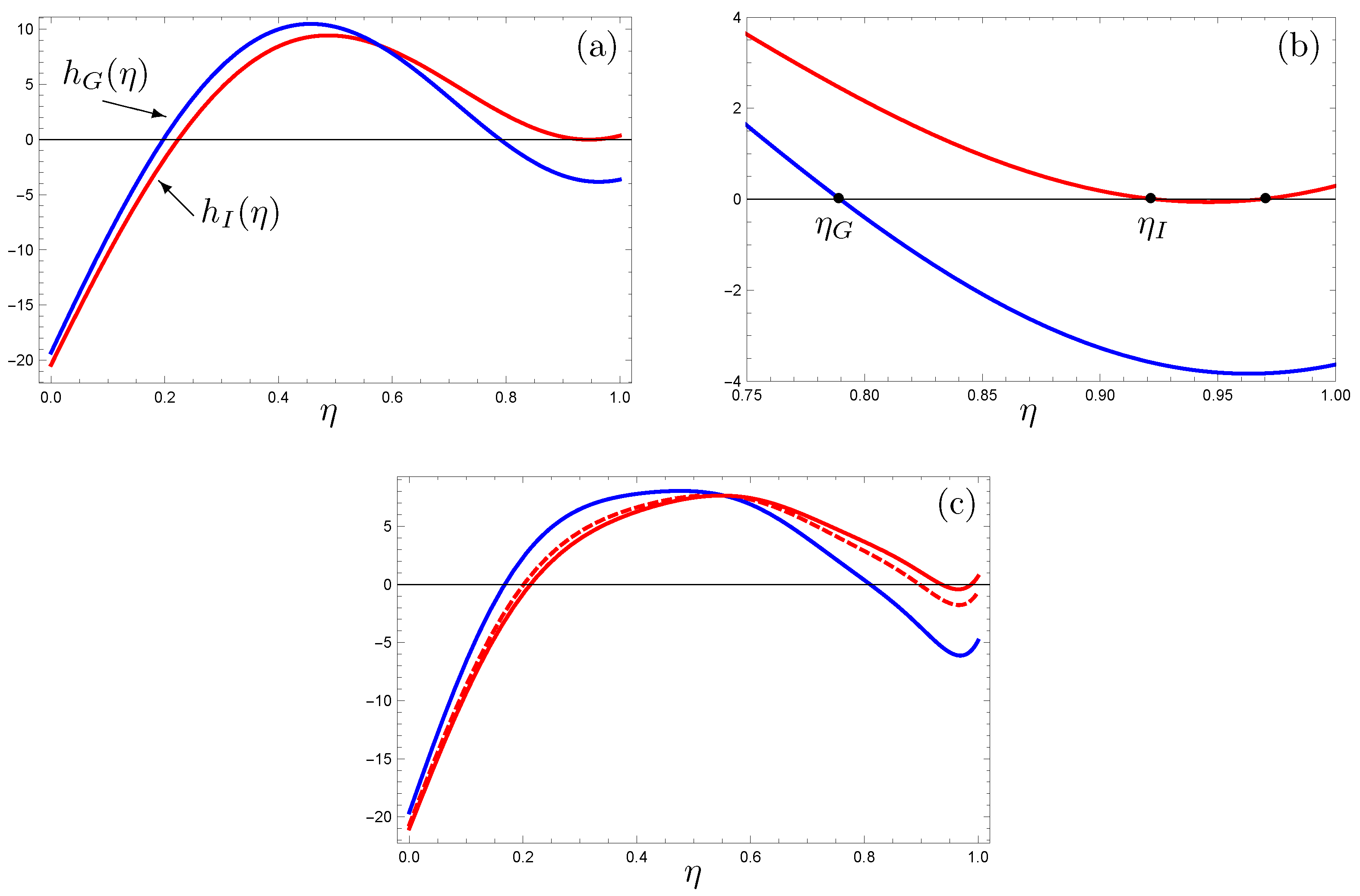
D increases the efficiency of the meridional heat transport. We saw previously (
Figure 2a) that an increase from
to
leads to a warmer world with a stable albedo line closer to the North Pole.
As mentioned in the Introduction, North put forth the possibility of using two D-values, with the smaller value corresponding to the ice-covered portion of the surface. While North only considered the fixed albedo line setting, system (19) has the advantage that the albedo- and ice-lines evolve with time. One might then imagine the value of D decreasing with an advancing ice sheet and increasing during a glacial retreat, playing its role in the negative feedback discussed in the Introduction. Here, we move to the discontinuous limit as it were, assuming a smaller constant value throughout the glacial advance, and a larger constant value throughout the retreat to an interglacial.
We will thus consider two climate regimes, one an “interglacial period” with
, and a “glacial period” for which
. We let
and
denote the function
in Equation (
17) when
and
, respectively. This represents step one in building the flip-flop characteristic of our model. We note the analysis to follow holds for any values
for which there are distinct small stable ice cap equilibria.
We pause before developing the model switching mechanism to revisit the positive ice albedo–temperature gradient feedback discussed in the Introduction. Let
and
denote the stable equilibrium solutions of Equation (
17) when
and
, respectively, as in
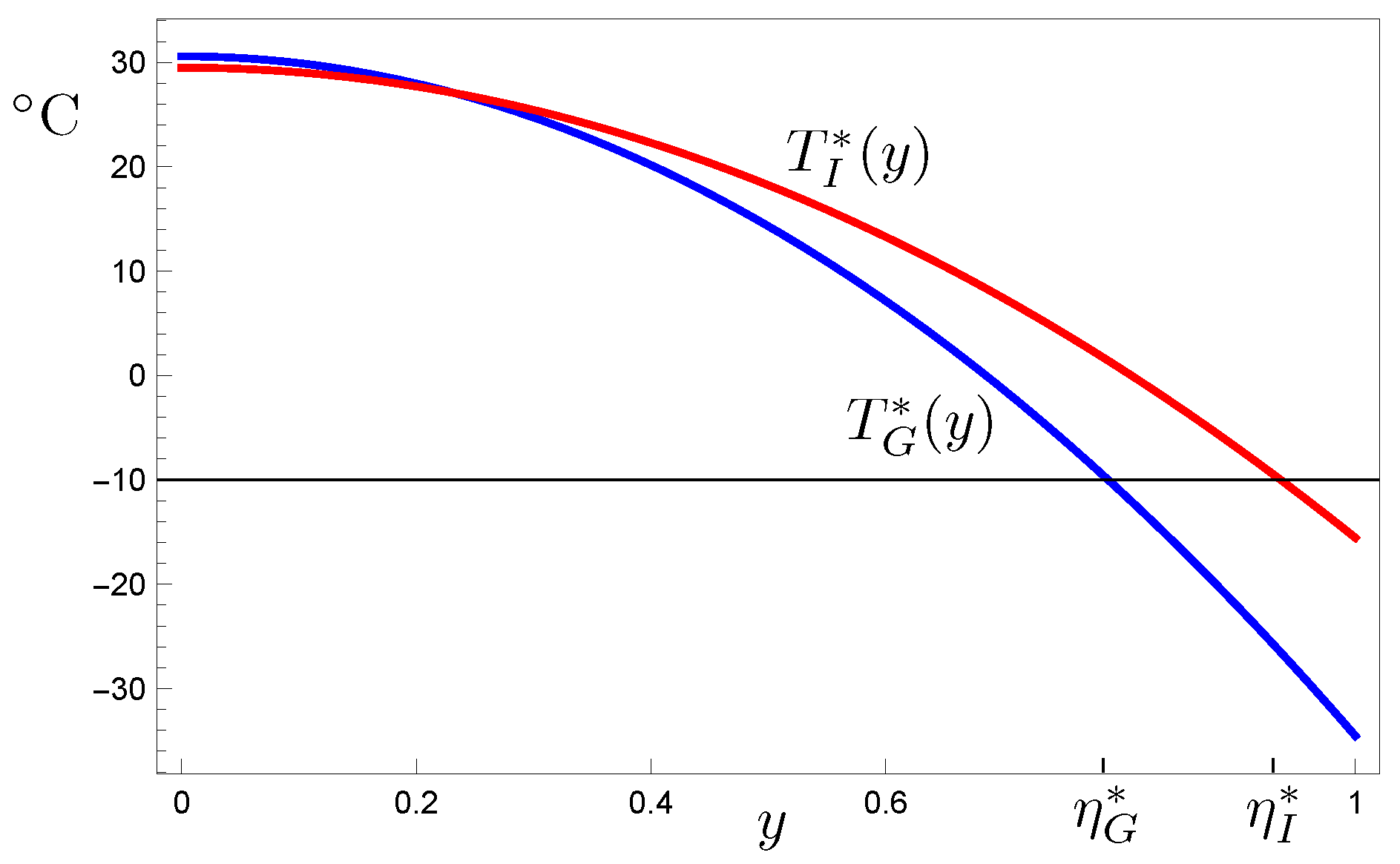
Figure 2. Let
and
denote the corresponding equilibrium temperature profiles (
14), which for
are plotted in
Figure 5. Note the temperature gradient during the glacial period (
) is larger than that during the interglacial period (
). We thus see that, at equilibrium, the model exhibits the desired effect associated with the positive ice albedo–temperature gradient feedback, namely, larger ice sheets due to enhanced poleward moisture transport brought on by an increased temperature gradient.
As for the switching mechanism from one climate state to the other, we recall the numerous studies mentioned above that indicate an increased ablation rate during glacial retreats is needed to simulate the glacial cycles in a qualitatively accurate manner. Our second step will be to select (dimensionless) ablation rates
to incorporate this assumption. The two climate regimes are then modeled by the glacial advance system
and the interglacial system
We set
, and we define the vector fields
and
Let
and
denote the flows associated with systems (20) and (21), respectively.
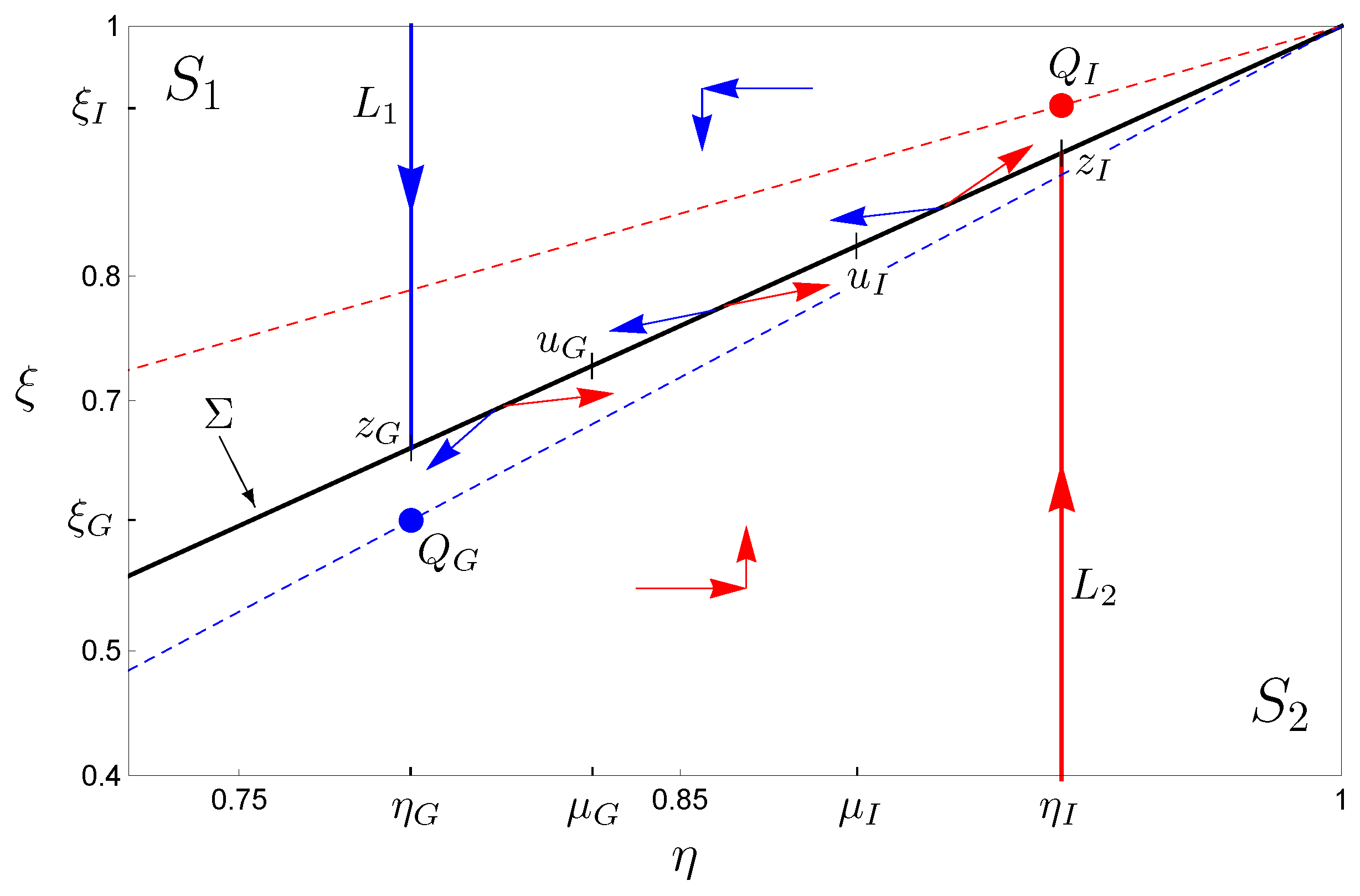
To switch climate regimes, we select a critical ablation parameter
. When
(i.e., the mass balance is negative), we assume the ice sheet is retreating and the system evolves according to (21). The system is in glacial advance mode when
(i.e., the mass balance is positive). In this fashion, the set on which
, namely
becomes a
switching manifold (or
discontinuity boundary) [
45]. A trajectory for either system (20) or (21) that intersects
in a crossing region switches to the alternate regime, as discussed in detail in
Section 5. In spirit, this switching from one flow to the other is entirely analogous to that found in Welander’s mixed ocean layer model [
28].
More formally,
separates
into the domains
Note that each of
and
extend smoothly to
. For
, consider the differential inclusion [
45]
While in
solutions have flow
, while trajectories evolve under the flow
when in
. For
, one assumes
lies in the convex hull of the two vectors
and
.
A solution to (
23)
in the sense of Filippov is an absolutely continuous function
satisfying
for almost all
t (note
is not differentiable at times
t for which
enters or leaves
). As
and
are continuous on
and
, respectively, the set-valued map
is upper semicontinuous, as well as closed, convex, and bounded for all
and all
. These properties ensure that, for each
, there is a solution
to differential inclusion (
23) defined on an interval
with
[
45].
6. Feedbacks and Meridional Flux at the Albedo Line
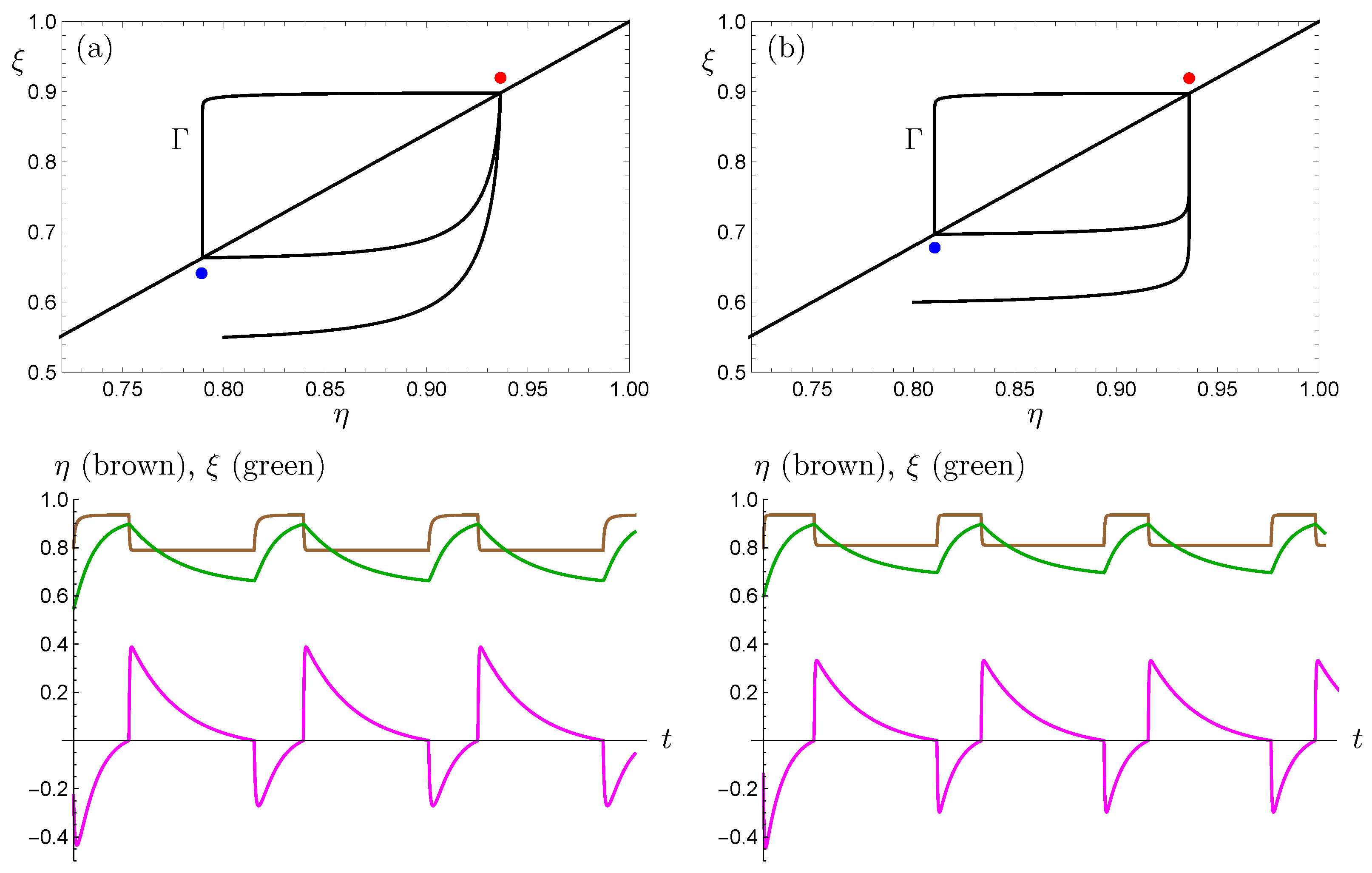
Placing the limit cycle depicted in
Figure 7 in the context of the climate feedbacks discussed in the Introduction, we consider first the glacial advance. At the onset of the glacial age, the albedo in the polar region increases, leading to a steeper temperature gradient. This in turn enhances the meridional transport of moisture to northern latitudes where it precipitates out as snow, leading to further ice sheet growth. The albedo line
descends and, over time, the ice edge
follows, with the ice sheet mass balance positive in this regime.
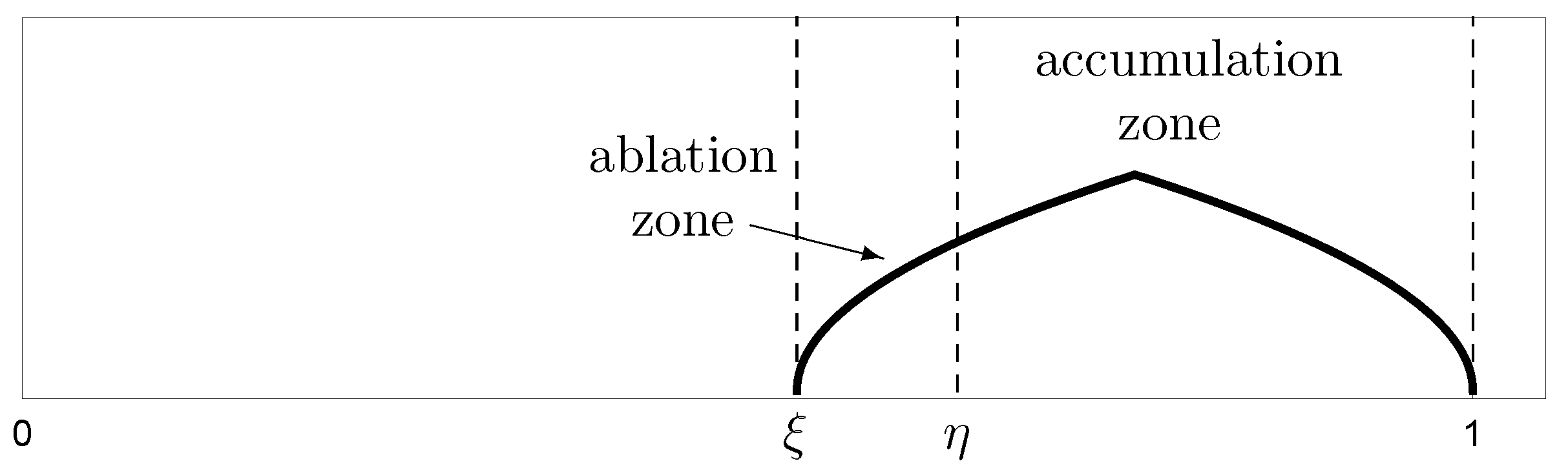
As the ice edge descends, the assumption of reduced meridional transport efficiency comes into play, inhibiting the positive ice albedo–temperature gradient feedback. Accumulation on the ice sheet is reduced and eventually comes to a halt, while inertia keeps the ice edge
from responding quickly [
9]. Thus, the ablation zone between
and
expands prior to the retreat, as is the case with the large model presented in [
2].
The expansion of the ablation zone triggers the switch to the interglacial state as the mass balance becomes negative. In this mode, transport efficiency is increased, whereas the meridional temperature gradient is reduced. The albedo line moves poleward with the ice edge slowly following. The effect of the increase in the diffusion coefficient can be seen in the fact the albedo line stops its retreat shy of the North Pole as, eventually, snow again begins to precipitate out and the cycle begins anew.
The behavior described above can be summarized by considering the total meridional heat flux across the albedo line
over time. The flux at
is computed by integrating the diffusive heat transport term in (
1) with respect to
y, while making use of expression (
7) for the temperature. The total heat flux moving poleward across latitude
y is proportional to
Using the assumption
for each
i and evaluating (
26) at
yields
Expression (
27) is then proportional to the total meridional heat flux across
.
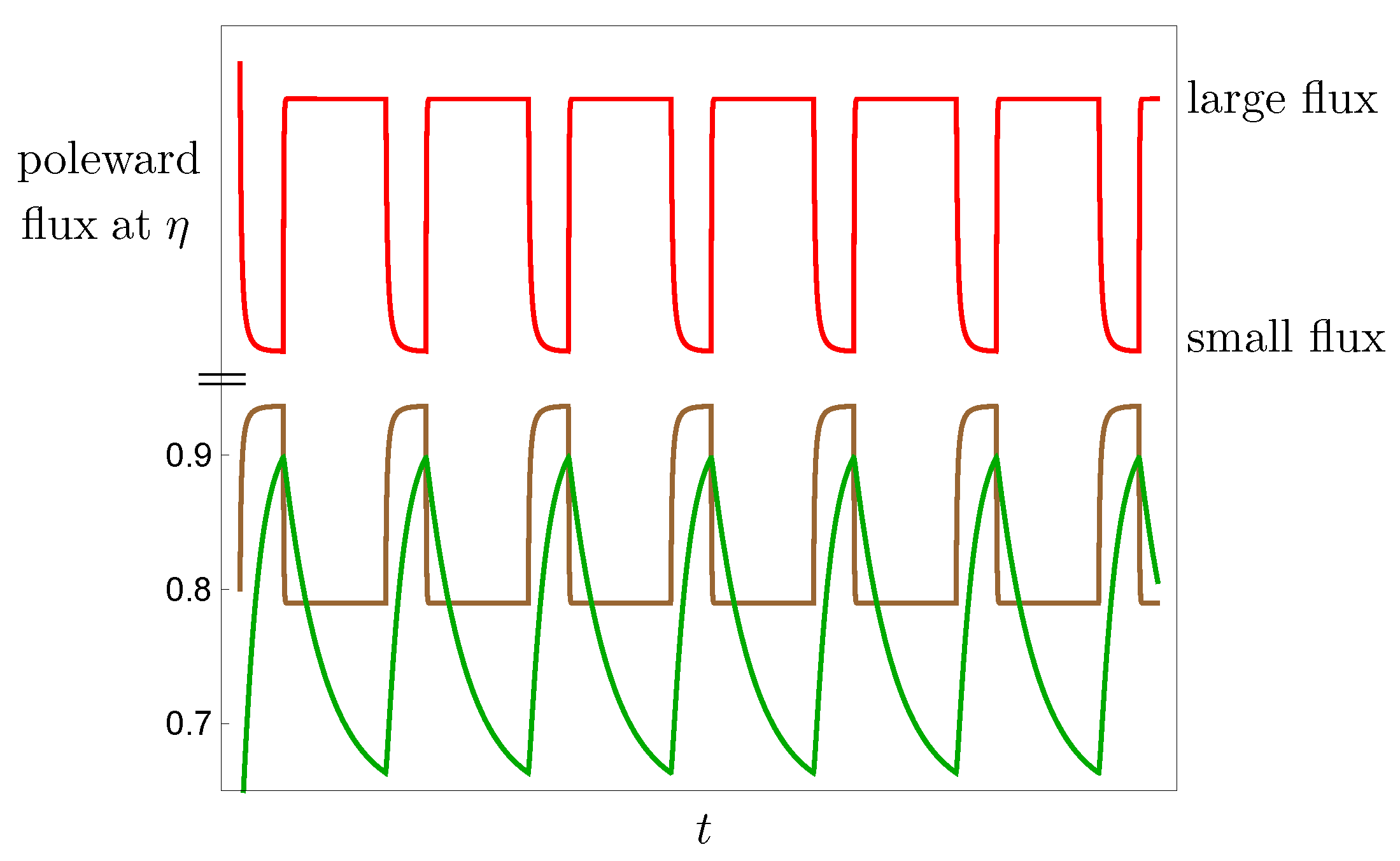
The plot of
is shown in
Figure 8. Note the increase in the poleward flux at
coincides with the advance of the albedo line. Due to the associated extensive ice cover, the transport efficiency is reduced, and, while the ice sheet edge continues to descend, the flux and the albedo line remain steady. When the system flips to the interglacial state, the poleward flux at
decreases as the albedo line retreats. Although the temperature gradient now weakens, the increased efficiency ensures moisture reaches northern latitudes, and eventually the albedo line stabilizes with the ice edge retreating. This simple flip-flop model serves to illuminate the interplay between the two competing feedbacks.
7. Bifurcation Scenarios
Recall that the ablation rates were chosen to satisfy
. As
increases to
b, the
-nullcline approaches the switching boundary
(see
Figure 6 and Equation (
24)). When
, the equilibrium point
lies on
; when
,
lies in
and thus becomes a visible equilibrium. Similarly,
can be made to pass through
by letting
decrease through
b.
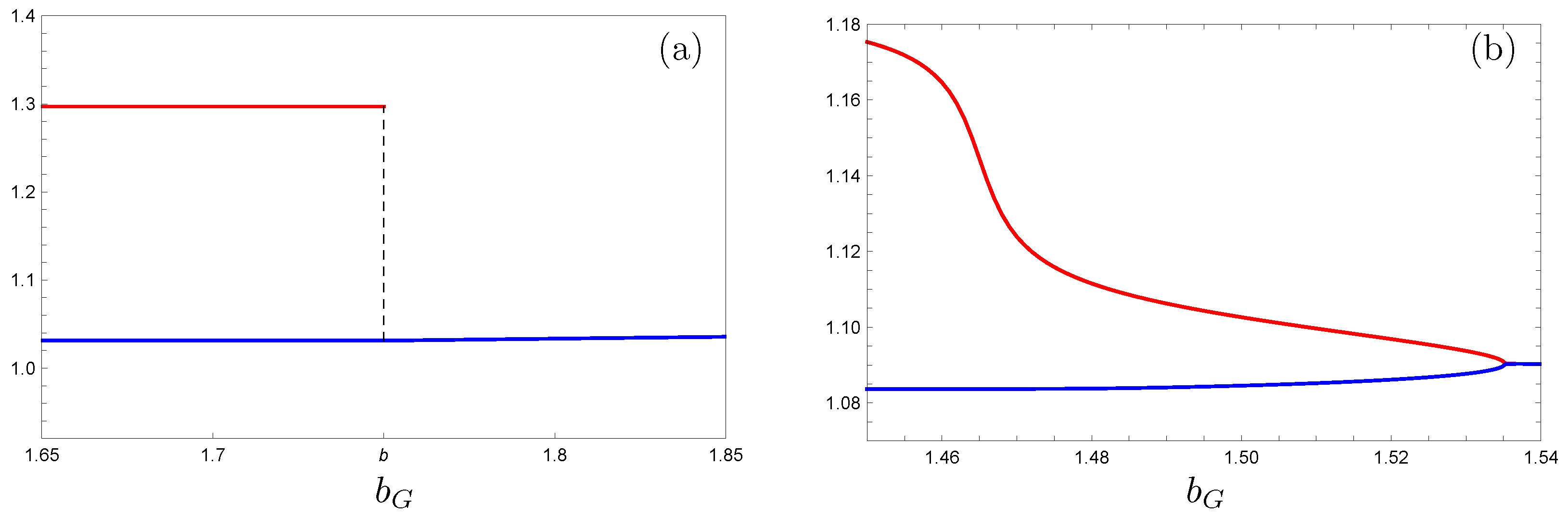
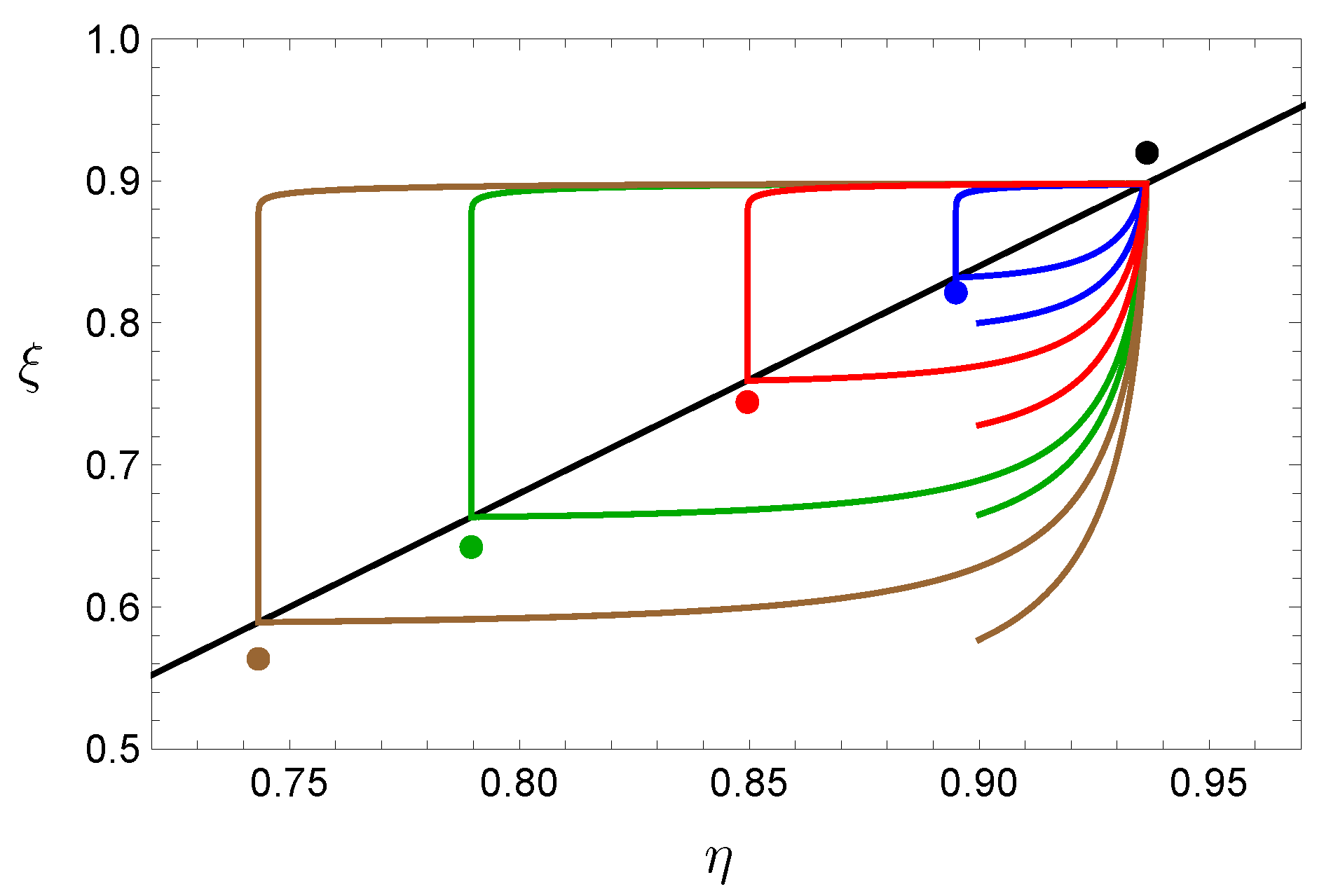
As
increases through
b, the limit cycle
is lost through a
border collision bifurcation [
44], a type of nonsmooth Hopf bifurcation. For
, a trajectory starting in
will converge to
, never intersecting
and so never triggering the flip-flop. In
Figure 9a, we plot the limiting maximum and minimum values of the norm of trajectories beginning in
as
passes through
b (assuming
is sufficiently small).
Figure 9b presents an associated smooth Hopf bifurcation in which the instantaneous switching from
to
and from
to
are replaced by smooth transitions. For the simulations presented here, the parameter
b in Equation (19b) is replaced by the expression
with
s replaced by the negative of the mass balance term,
. Similarly, replacing
and
in (
28) with
and
, respectively, leads to a smooth transition between the glacial advance and retreat diffusion constants. In this way, system (19) becomes a smooth dynamical system that approximates our flip-flop model for large
M-values.
We again vary
, but now in the smooth
-system. The plot in
Figure 9b displays the existence of a stable (spiral) equilibrium for
larger than roughly 1.535. For
, there is a stable limit cycle created through a supercritical Hopf bifurcation, with the maximum (red) and minimum (blue) values of the norm on the limit cycle plotted as a function of
. The existence of a Hopf bifurcation has played an important role in other models of the glacial cycles; see, for example, [
10,
46].
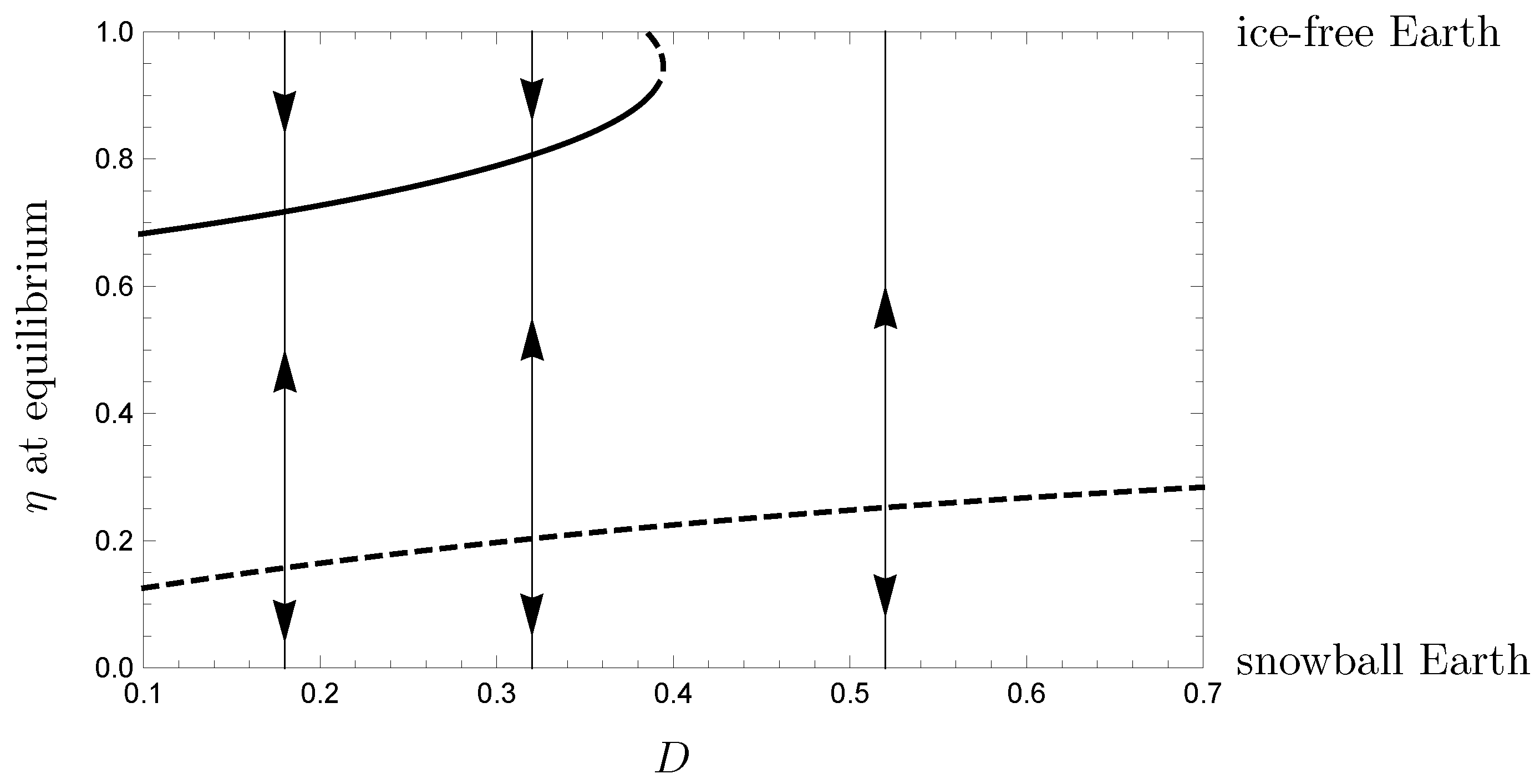
Returning to the discontinuous model, one can also vary the diffusion constant parameters. For example, the choice of
determines the extent of the glacial state ice cap: reducing
leads to larger ice caps (recall
Figure 1). Varying
then leads to limit cycles with larger amplitude and period (
Figure 10), akin in spirit to the behavior associated through the MPT.
Welander’s mixed ocean layer flip-flop model [
28] was placed in the nonsmooth setting and analyzed in [
47]. The periodic orbit in the Filippov analysis of Welander’s equations arises in a nonsmooth Hopf bifurcation through a fused focus [
27] as a parameter is varied. We note that the corresponding bifurcation in our model is entirely analogous.
Recall that there is a repelling sliding region between the invisible fold singular points
and
on
, assuming the time constant
for the evolution of the ice edge
is sufficiently small. As
is increased,
and
merge in a double invisible tangency point (what Filippov termed a
fused focus) and then pass each other, with an attracting sliding region now on
between
and
and no periodic orbit. This is the same type of bifurcation exhibited by Welander’s model and presented in [
47].
While simple in nature, the model presented here exhibits relatively rich dynamical behavior.
8. Forcing with Milankovitch Cycles
The eccentricity
e of the Earth’s orbit, which varies with a period of roughly 100,000 years, has an effect on the amount of insolation reaching the planet and thus on climate on geologic time scales. The global annual average insolation as a function of
e is
where
is the insolation value corresponding to
[
11]. The magnitude of the change in
Q due to eccentricity is roughly
W/m
. This change in incoming solar radiation by itself is too weak to account for the glacial-interglacial global temperature changes [
5].
The obliquity
of the Earth’s spin axis plays an important role in our climate over geologic time. The obliquity varies with a period of about 41,000 years, ranging between roughly 22
and 24.5
. For smaller
-values, less insolation is received in the polar regions, leading to an increased temperature gradient. This scenario is then favorable for the growth of a polar ice cap. Conversely, greater insolation is received in the polar regions for larger
-values, leading to a decreased temperature gradient. This scenario is thus favorable for the potential retreat of a large ice sheet. The roles of eccentricity and obliquity—and precession, if seasons are considered—in influencing the Earth’s glacial-interglacial history have been well-studied (see, for example, [
17,
23,
48]).
Recall that the insolation latitudinal distribution function (
2) depends upon
In [
36], a mechanism to compute
as a polynomial in both
y and
, to any desired degree of accuracy, is presented. As discussed in [
36], the second degree expansion
well approximates Equation (
2) for planets with obliquity values similar to Earth’s.
We incorporate (
29) and (
30) into the Filippov system (
23), using values of
e and
computed by Laskar [
22]. A difficulty that arises immediately is the proximity of the (interglacial) small, saddle ice cap equilibrium to the stable node
when
(
Figure 2b). In every simulation run with Milankovitch forcing, the
-trajectory shoots poleward of the stable manifold (
25) of the small ice cap saddle and heads to the boundary
. We thus use the reduced value
, for which there is no small ice cap saddle equilibrium (recall
Figure 3), for this simulation.
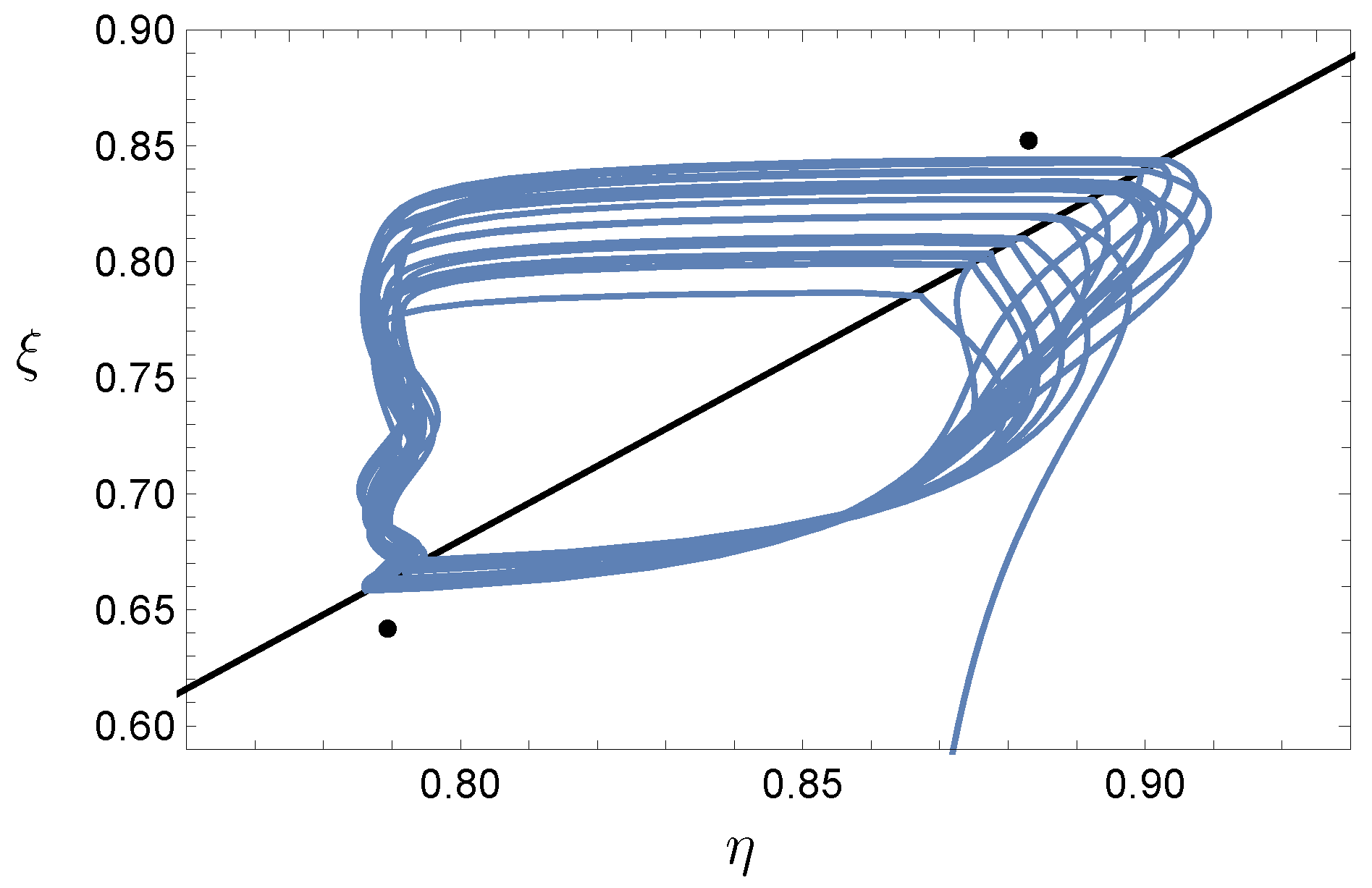
Results of a representative solution are shown in
Figure 11 and
Figure 12. Note the trajectory continues to pass through the discontinuity boundary when in both glacial and interglacial modes, thereby producing the glacial cycles. The top image in
Figure 12 shows the behavior of
and
over the past 1 million years, that is, through the past 10 model glacial cycles. The effect of Milankovitch forcing is clearly evident in the plot of the albedo line
.
The lower plot in
Figure 12 displays the meridional flux at the albedo line
(
27) (red, scaled and translated), as well as the obliquity
(blue). We focus on the obliquity as the magnitude of the change in insolation due to time-varying eccentricity is too small to account for the glacial-interglacial global climate changes, as mentioned above. We also note the emphasis here is placed on
rather than
as it is the albedo line (or snow line) that principally drives the model dynamics, due to its role in the competing feedbacks discussed in the introduction.
Note that maximum and minimum -values correspond to minimum and maximum values, respectively, of . This is consistent with the fact that smaller -values lead to larger temperature gradients and increased meridional transport, while larger -values lead to reduced temperature gradients and diminished meridional transport.
Huybers argued in [
17] that high obliquity is essential for the initiation of a glacial retreat. Indeed, the dominant signal seen in the climate data prior to the MPT is obliquity, as mentioned previously. Huybers also noted that after the MPT the climate data indicate that at times two maximum
-values are skipped before initiation of a deglaciation. He further posited that perhaps the 100 kyr cycles after the MPT are the average of 80 kyr (two
-cycles per glacial cycle) and 120 kyr (three
-cycles per glacial cycle).
Huyber’s proposition is supported by the model output. As can be seen in the lower plot in
Figure 12, one half of the model glacial cycles skip two maximum
-values. Correspondingly, the flux at the albedo line passes through two minimum values during one half of the ten glacial cycles in
Figure 12, prior to decreasing to the the flux value at
during an interglacial. The conceptual model introduced here illustrates Huyber’s concept quite well, while bringing the poleward flux at
in response to obliquity forcing into play in a novel way.
9. Discussion and Future Work
We have introduced a new conceptual model of the glacial cycles, with an energy balance annual and zonal mean surface temperature equation with diffusive heat transport (
1) the starting point. We recast the coupled dynamic ice line introduced in [
15] as the albedo line, entirely consistent with Budyko’s piecewise-constant albedo function (
3). As in [
20], the new ice edge variable
is incorporated to allow for consideration of ablation and accumulation zones on the ice sheet.
The present work differs from [
20] in several important regards. The meridional transport term used in [
20] is Budyko’s relaxation to the mean term (
5). The associated zonal average surface temperature equation again presents an infinite dimensional dynamical system, one which is approximated in a manner far different from that used here in
Section 3 [
12]. Lacking a diffusive process, it is the critical temperature
that is varied between glacial and interglacial states in [
20]. One motivation for this choice was provided by [
8], in which the value of
was assumed to depend upon changes in the deep ocean temperature.
The model presented here was strongly motivated by work of Raymo and Nisancioglu [
23], in which competing feedbacks associated with meridional transport and related to ice-albedo feedback are discussed in depth. It is natural to connect these feedbacks with poleward flux, as we have done here, which then leads to consideration of a diffusive transport term.
We note the use of diffusive heat transport smooths the albedo function discontinuity in the sense the temperature profile is continuous (
Figure 5; this is not the case when using transport term (
5)). The discontinuity in our model vector field arises from the use of a larger ablation rate during interglacial retreats, and a switching mechanism motivated by mass balance principles as in [
20].
The model focuses on the interplay of feedbacks associated with ice-albedo feedback, namely, the temperature gradient (positive) and transport efficiency (negative) feedbacks, similar in spirit to considerations in [
23]. We assume a large ice sheet results in less efficient heat transport, and hence we use a smaller “glacial” parameter
than “interglacial” parameter
.
An ad hoc method is used to analyze the resulting nonsmooth geometric singular perturbation problem. A nonsmooth attracting limit cycle is shown to exist, provided the ice edge moves slowly enough. The model oscillations continue when forced by time-varying obliquity and eccentricity values. We note the competing feedbacks mentioned above serve to determine the maximal ice sheet size.
Many questions of a mathematical nature are raised by this flip-flop glacial cycle model. It would be of interest to extend the analysis presented here to the boundary of
, particularly the segments
and
. The Filippov flow would have to be extended to include this portion of state space, perhaps along the lines of work by Barry et al. in [
16].
Interesting questions concerning bifurcations would then arise for the extended flow and a state space that includes the boundary of
. What becomes of the saddle-node bifurcation indicated in
Figure 3 with dynamics defined on the line
? In addition, an investigation of model dynamics in the case of the small unstable ice cap scenario (
Figure 2b) would then be of interest when subjected to Milankovitch forcing, which can push trajectories poleward toward
as discussed previously.
Another intriguing problem concerns making, say, the stable equilibrium visible and placing it near or on the discontinuity boundary , and then determining the effect of Milankovitch forcing in this situation. Might Milankovitch forcing push the system to tip over to the interglacial mode, and how might any such tipping depend upon the time constant for the ice sheet edge?
We also note the work presented here is the first part of a larger project aimed at investigating the Pliocene-Pleistocene Transition (PPT) via our mathematical model. The PPT refers to the development of perennial sea and land ice in the Northern Hemisphere, of an eventual extent similar to that which we have today. The study [
49] used ocean cores drilled at the present Arctic Ocean summer ice margin to reconstruct the local climate during this transition. The following findings come from this work.
Roughly 5 Mya (million years ago) the Arctic Ocean was ice free at the drilling site, or covered by first-year winter ice. Sea ice expanded from the central Arctic Ocean for the first time about 4 Mya, at a time when atmospheric CO levels were similar to today’s and the global average temperature was 1–2 C warmer than at present. This early Pliocene climate is often viewed as an analog of a future warmer Earth.
Not until about 2.6 Mya, during the PPT, did Arctic Sea ice expand to its modern winter limits. The glacial cycle model presented here concerns the Earth’s climate from this point to the present.
A long-term decrease in atmospheric CO
concentration accompanied the amplification of the polar cooling described above through the PPT. The parameter
A in (
1) is often used as a proxy for the concentration of greenhouses gases such as atmospheric CO
: larger CO
values lead to reduced OLR (a decrease in
A), and smaller CO
concentrations lead to increased OLR (an increase in
A).
Our model can be enhanced by taking
A to be a dynamic variable, similar to the work of Barry et al. in [
16]. Consideration of an ice-free state would entail an analysis of system (
23) on the boundary
or
. Either scenario might be associated with a decrease in CO
, that is, an increase in
A, as atmospheric CO
is drawn down by a silicate weathering process [
50] enhanced by the lack of ice cover. In future work, the idealized mathematical model presented here will be extended in an effort to gain insight into the interactions of the large scale mechanisms and feedbacks in play through the PPT.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}