1. Introduction
In a variety of structural engineering applications, columns are often built as one of the most important main components by which axial compressive forces, one of the main types of external loading, are supported [
1]. As a result, over the past few decades, many researchers have devoted a lot of effort to improving the analysis of column structure systems. After the concept of functionally graded material (FGM) was established in 1984 by material scientists in Japan, recently, FGM is usually composited from ceramic and metallic materials, because these composites enhance the advantages of the materials, such as stronger mechanical performance, as well as better thermal resistance [
2]. Therefore, FGM has been successfully applied for various engineering applications, such as aerospace, precision machinery, and biomedical structures. Due to the benefits of space utilization, esthetics, safety, optimization, and economy, tapered components are typically used in engineering practices [
3]. In particular, taper elements behave differently from the uniform ones because of the variation of the cross-section along the axial coordinate yields effective stress distributions and a strong coupling between the stress resultants. This concept is important for optimizing the structural members and reducing the self-weight. Thus, by adopting tapered components, safe and economical designs are achieved.
In this respect, much research has been undertaken on the above-mentioned subject that deals with functionally graded cantilever columns. Generally, FGMs are divided into two types: laterally functionally graded material (LFGM) in which the mechanical properties, i.e., the Young’s modulus and mass density, are composited laterally to the axial coordinate; and axially functionally graded material (AFGM) in which its properties are composited axially along the coordinate. In this study, AFGM is a major concern for analyzing the free vibration of the cantilever columns.
For the free vibration problems in this subject, the mathematical models include the inertia forces, which are treated as the static quantities. The following references and their citations include the mathematical models and historical reviews of this subject. The typical studies on free vibration of AFG columns are briefly reviewed here in chronological order: Akgoz and Civalek [
3] studied natural frequencies of a linearly tapered microbeam based on the modified couple stress theory; Calio and Elishakoff [
4] investigated the closed-form solutions of natural frequency for a simply supported beam-column with an elastically guided end condition at one end, where the trigonometric functions of the Young’s modulus in the mathematical formulation were considered; Li [
5] studied the static and dynamic behaviors of a prismatic beam, including the rotatory inertia and shear deformation; Singh and Li [
6] studied critical buckling loads of a cantilever column with a piecewise element, restrained by the elastic foundation; Huang and Li [
7] researched a new approach for the free vibration of tapered beams with simply supported, both clamped, clamped-pinned, and cantilevered end conditions, respectively, where the Fredholm integral equations were used in the mathematical formulations; Shahba et al. [
8] investigated the free vibration and stability of a non-prismatic column with classical and non-classical boundary conditions; Shahba and Rajasekaran [
9] studied the free vibration and stability of tapered beams, in which governing equations for the free vibration and buckling were solved by the differential quadrature element method (DQEM); Kukla and Rychlewska [
10] dealt with beams with both ends fixed, which were fabricated from two different FGMs for analyzing free vibration; Yilmaz et al. [
11] investigated the buckling loads of non-prismatic columns restrained by the elastic foundation using the differential quadrature method (DQM); Chandran and Rajendran [
12] studied closed-form solutions of the buckling load of a prismatic cantilever column using the principle of conservation energy; Shafiei et al. [
13] studied non-linear vibrations of a linearly tapered microbeam with a square cross-section, where the governing equations were solved by the differential quadrature method (DQM); Ranganathan et al. [
14] studied the buckling of slender columns that determined the buckling loads by the linear perturbation method together with the Rayleigh-Ritz method and investigated the maximum buckling loads under the same average mean Young’s modulus; Elishakoff et al. [
15] studied the buckling and vibrations of a column sharing Duncan’s mode shapes and assuming a fifth order polynomial; Rezaiee and Masoodi [
16] investigated closed-form solutions of the natural frequencies and buckling loads of tapered beam-columns supported by semi-rigid connections; and Lee and Lee [
17] studied the free vibration and buckling of tapered cantilever columns with square and circular cross-sections. As discussed above, FG materials developed in 1984 are of particular interest in dealing with the free vibration of FG columns.
This paper presents a unique numerical approach for analyzing the free vibration of AFG cantilever columns. In terms of geometry, the column is tapered, the cross-sectional shape is a regular polygon, and the volume of the columns is constant. In the literature, the scope of this topic has not yet been covered. This paper consists of the following contents:
Section 2 describes the mathematical model of the problem. By using the equilibrium of free body diagram of the column element subjected to the transverse and rotatory inertia loadings, the differential equation governing the mode shape of vibrating columns is derived with its boundary conditions. A variable function for the Young’s modulus of AFGMs is adopted as a linear function, and in terms of the column geometry, three taper functions are selected as the linear, parabolic, and sinusoidal taper.
Section 3 shows the solution methods to the problems of this study. To calculate natural frequencies along with their corresponding mode shapes, the governing differential equation is solved by the direct integral method enhanced by the determinant search method. For the verification purpose, the predicted natural frequencies are compared with those obtained by the general-purpose software ADINA and the references.
Section 4 deals with the numerical experiments and provides a discussion. The effects of the material and geometrical properties of AFG cantilever columns on free vibration behaviors are extensively discussed.
Section 5 summarizes this study and suggests areas for further study.
2. Mathematical Model
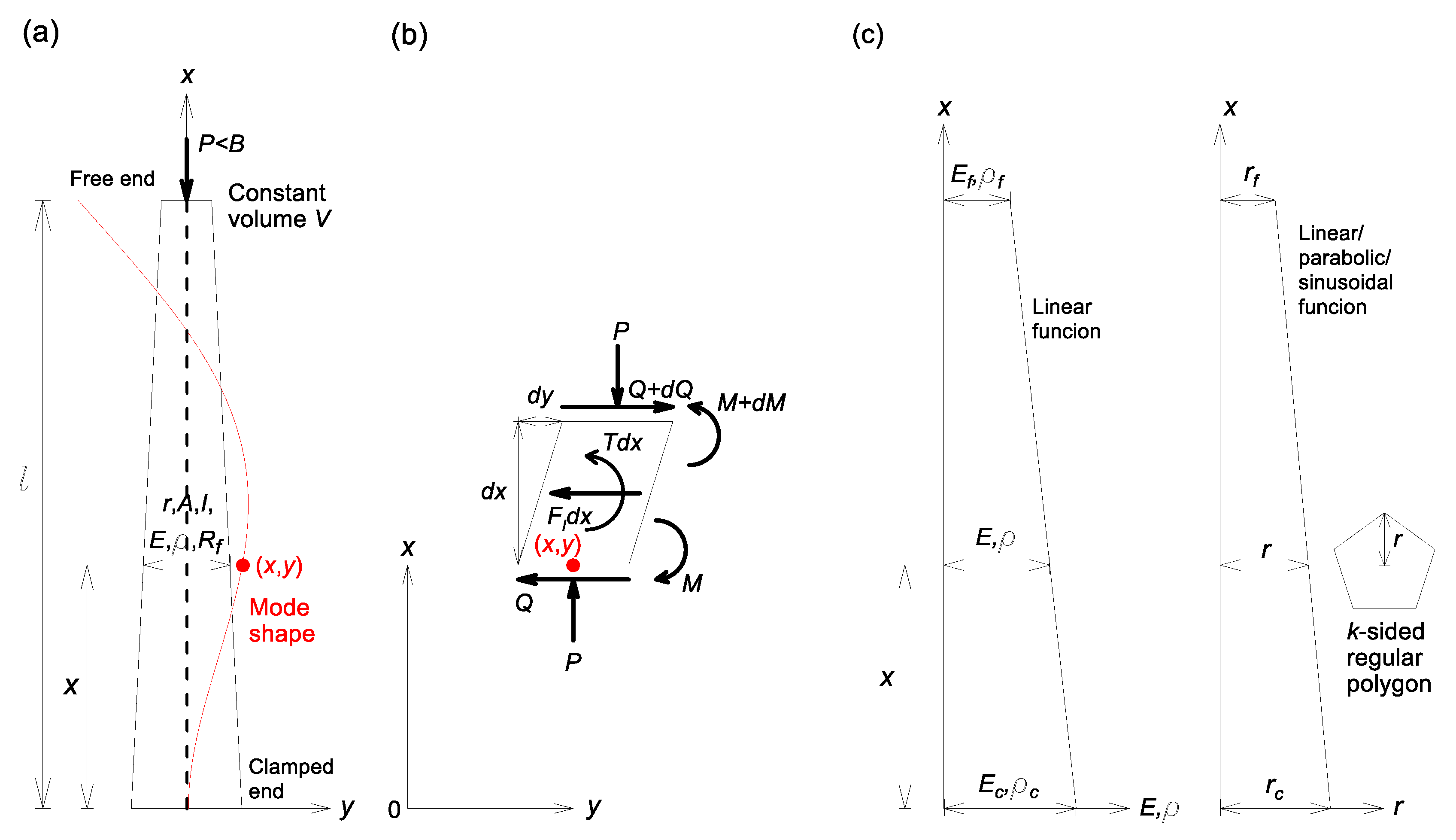
Shown in
Figure 1a is an AFG cantilever column with a length
and a volume
. From a geometrical point of view, the column is tapered, the cross-sectional shape is a regular polygon with an integer side number
, as shown in
Figure 1c, and the column volume
is constant. The axial coordinate
is zero at the clamped end, and the circumradius, area, and second moment of the regular polygonal cross-section are denoted by
,
, and
, respectively. The Young’s modulus and mass density are represented by
and
, and the flexural rigidity is denoted by
. At the clamped end (
),
,
, and
are denoted by
,
, and
. At the free end (
),
,
, and
are denoted by
,
,AF and
. The column is externally subjected to an axial compressive load
less than the buckling load
at the free end.
When the column vibrates, the undeformed column axis depicted by the straight dashed line elastically deforms the mode shape depicted by the solid line in
Figure 1a, defined in Cartesian coordinates
. The cross-section of the deformed column is subjected to the dynamic shear force
and bending moment
, as well as the axial force
. The column element shown in
Figure 1b is loaded to the transverse inertia force
and the rotatory inertia couple
, since the column has mass. In this study, the free vibration is a harmonic motion in which each dynamic coordinate is proportional to sin
. For example,
where
is the transverse deflection,
is the angular frequency in motion where the dynamic co0
is the mode number, and
is the time.
Using the equations of
and
established from the free body diagram shown in
Figure 1b, the equations of the dynamic equilibrium are obtained as
From Equation (2), the first derivative
is re-arranged as
Combining the second derivative
obtained from Equation (3) and
in Equation (1) yields
The bending moment
, transverse inertia force
, and rotatory inertia couple
are expressed as [
18,
19]
where the rotatory inertia index
is defined as
From Equation (7), the first derivative
is obtained as
Substituting Equations (6) and (9) into Equation (4) yields Equation (10), and from Equation (5), the second derivative
is obtained as Equation (11):
Using Equations (10) and (11) and re-arranging against
yields the following equation, or
Now consider the boundary conditions of the column ends (
and
). At the clamped end (
), the deflection
and the rotation
are zero:
At the free end (
), the bending moment
in Equation (5) and the shear force
in Equation (3) together with Equations (5) and (7) are zero, that is
In the equations presented, the variable functions of
,
, and
are arbitrary, so if each respective function is given, the angular frequency can be determined. Now, to define variable functions mentioned above for the mathematical formulations. First, in order to define the function of Young’s modulus
, the modular ratio
is introduced as
There are various kinds of functions for Young’s modulus
in the literature: linear [
2,
3,
9,
12,
14,
17], trigonometric [
4], polynomial [
5,
14,
15,
16], piecewise [
6], exponential [
7,
10], and periodic [
14] functions, etc. The linear function is selected in this study, and then the function of
at the coordinate
is expressed as [
17]
For the variable function of the mass density
, it is usual that
is equal to
[
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17], and then the density ratio is the same of modular ratio
(see
Figure 1c). Therefore, the mass density ratio
defined as a ratio of
to
and the linear function of
at the coordinate
can be written as
For the variable function of the circumradius
, the taper ratio
is introduced as
The function of
at the coordinate
is expressed as
where
is an arbitrary function of
,
, but in terms of geometry, three kinds of taper functions
are selected in this study as follows.
for a linear taper,
for a parabolic taper, and
for a sinusoidal taper with
.
Using the function of
in Equation (20), variable functions of
and
for a
-sided regular polygonal cross-section at the coordinate
are obtained as
where the constants of
and
for the regular polygon cross-section are:
Using Equations (16) and (23), the variable function of flexural rigidity
at the coordinate
is established:
The volume
of the column can be determined as
where the constant
by the taper type is:
for a linear taper,
for a parabolic taper, and
for a sinusoidal taper.
To facilitate numerical experiments, the following dimensionless system parameters are introduced:
where
are the normalized Cartesian coordinates,
is the volume ratio,
is the load parameter,
is the buckling load parameter, and
is the frequency parameter. Substituting Equations (18), (22), (23) and (25) into Equation (12) and using Equations (28)–(33) yields the fourth order ordinary dimensionless differential equation, or
where
for a linear taper,
for a parabolic taper, and
for a sinusoidal taper.
Boundary conditions of Equations (13) and (14) in the dimensional form are transformed into the non-dimensional form using Equations (28)–(33), or
The above fourth order ordinary differential Equation (34) with boundary conditions, Equations (36) and (37), governs the free vibration of AFG cantilever columns with a regular polygon cross-section and constant volume. In Equation (34), the taper type, side number , modular ratio , taper ratio , volume ratio , and load parameter are input parameters, while is the eigenvalue which is calculated with its mode shape , using appropriate numerical methods.
4. Numerical Experiments and Discussions
Prior to the numerical experiments, it is important to determine the suitable step size
in the Runge-Kutta method for efficiently integrating efficiently differential Equation (34). To determine the appropriate
, the convergence analysis was performed by the number of dividing column elements,
, and its result is shown in
Figure 2, where the input column parameters are presented. It has been observed that solutions of
with
converge to those with
within three significant numbers. In this study, all computations with
in the parametric study were carried out on a PC without any difficulties.
In the available literature, the closed-form or numerical solutions to this problem are lacking, so that, for verification purpose, the selected results of this study are comparable to those of the general-purpose software ADINA and those in the authors’ previous work [
17]. The predicted natural frequencies
for
and
with the linear taper are compared in
Table 2. Here, AFGM is composited with pure aluminum (Al) at the clamped end and pure zirconia (ZrO
2) at the free end, from which the Young’s modulus
and mass density
can be defined along with
using Equations (16) and (18). The column parameters are:
m,
m
3,
GPa,
kg/m
3 (Al);
GPa,
kg/m
3 (ZrO
2); and
. From these parameters, natural frequencies
Hz are obtained from
predicted in this study. Results of this study, ADINA, and reference [
17] in
Table 2 are in good agreement within a 3.5% error. In these comparisons, the theory, including the numerical method developed herein, is verified.
Hereafter, the lowest three frequency parameters (
)
are computed for the numerical experiments. Also
with
are computed in
Table 3,
Table 4 and
Table 5 since this load case is the most practiced in practical engineering. First, selected analyses were conducted to determine the effects of rotatory inertia index
, side number
, and taper type on
, and these results are listed in
Table 3,
Table 4 and
Table 5. Note that the column parameters used in the parametric study are given in each table.
Table 3 shows the effect of the inertia index
on
, where the volume ratio
varies from
to 0.05. From these results, the following findings are observed: (1)
is always lower with rotatory inertia
than without rotatory inertia
, as expected based on the free vibration analysis of structures made of conventional homogeneous materials [
21]; (2) this frequency reduction is magnified by a higher mode number
and larger parameter
; and (3) in practical column designs, the rotatory inertia couple reduces the frequency less than 0.6% for
, less than 4.3% for
and less than 11.6% for
, which cannot be negligible.
Table 4 shows the effects of side number
on the frequency parameter
, where the number
varies from
and
. Hereafter, all numerical results included the rotatory inertia couple (
). The frequency parameter
with a smaller side number
is larger than
with larger
. For an illustrative example, the fundamental frequency parameter
of
(triangle) is 9.9% (1.552/1.412=1.099) larger than
of
even though the column volumes
are the same. When the
value increases,
converges to
of
. It is observed that
for
(octagon) approaches
for
within 1.22%. From these results and others not shown, the effect of
is greatly reduced from
(critical mode) for the higher mode.
The effects of taper type on the frequency parameter
, are shown in
Table 5. The fundamental frequency parameter
is larger in the order from the linear to sinusoidal to parabolic taper, while for the higher modes
and
,
are larger in the order from the parabolic to sinusoidal to linear taper. As an illustrative example,
of the linear taper is 5.6% (1.445/1.369 = 1.056) larger than
of the parabolic taper and 2.2% (1.445/1.414 = 1.022) larger than
of the sinusoidal taper. In higher modes, the effect of taper type may be negligible.
The numerical results for the modular ratio
, taper ratio
, volume ratio
, and load parameter
are presented in
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
Figure 8, where the effect of rotatory inertia
is included. Note that column parameters used in the parametric study are presented in each figure.
Figure 3 presents the frequency curves of
versus
. The frequency parameters
decrease as the modular ratio
increases for all mode numbers
. The largest
occurs at
. Higher decreasing rates of
are observed for the smaller values of
, particularly for
. Larger values of
lead to smaller reduction rates of
.
Figure 4 presents the frequency curves of
versus
. The frequency parameters
decrease as the modular ratio
increases for all mode numbers
. The characteristics of the frequency curves are similar to those of
Figure 3. The largest
occurs at
and the value of
converges to a common value, i.e.,
.
Figure 5 represents the three dimensional curved surface map of
with respect to the fundamental frequency parameter
in the domain of
and
for a given set of column parameters of the linear taper,
,
and
, which is the same as previous
Figure 3 and
Figure 4.
Figure 5 reflects the characteristics of both
Figure 3 and
Figure 4. The
value decreases as both
and
values increase, and therefore the maximum value of
occurs at the coordinates
,
) and the smallest value of
at the coordinates (
,
, as shown in this figure. If the values
and
are infinitely extended, i.e., zero flexural rigidity
at the clamped end (
), the
value converges the minimum value of
. This means that the cantilever column with the above given set of column parameters has the fundamental frequency parameters
in the range of
.
Figure 6 presents the frequency curves of
versus
. The frequency parameters
decrease as the volume ratio
increases. For the lower modes
and 2, the effect of
on
is negligible, while for the higher mode
not negligible. It is particularly noteworthy that, only in this figure, the angular frequency
with the smaller
is larger than
with larger
, since
is proportional to
, i.e.,
(see Equation (33)).
Figure 7 shows the frequency curves of
versus
. The frequency parameters
decrease as the load parameter
increases. When
decreases and reaches zero, the column buckles and then becomes static state, i.e.,
. The corresponding
with
is the buckling load parameter
. For an example for the fundamental mode
, the critical (
) buckling load parameter
is
is marked by ■ in the horizontal
axis, i.e.,
. Using this physical phenomenon, the buckling loads
with natural frequencies of zero can be determined [
17]. It is particularly noteworthy that after buckling (
,
values are meaningless in practical engineering, since the column has already buckled.
Now, consider the effects of column parameters on the vibration mode shapes.
Figure 8 shows examples of the mode shapes for the given set of column parameters presented in this figure. In
Figure 8a, three lowest (
) mode shapes for the linear, parabolic, and sinusoidal tapers are shown. In
Figure 8b, those for
are shown. Three mode shapes depicted by solid, dashed, and dotted curves, respectively, in
Figure 8a,b, are much different from each other and therefore, the effects of the taper type and modular ratio
on the mode shapes are significant. From these mode shapes, the positions of nodes and maximum amplitudes of the free vibrations are understood.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}