1. Introduction
With the rapid growth of the numerical field, various physical and technical applications [
1,
2,
3] are justifying the importance for solving the nonlinear equations. Such problems are arise in various fields of natural and physical sciences, including the heat and fluid flow problems, initial and boundary value problems, as well as problems associated with global positioning systems (GPS). For retrieving the solution through an analytical approach is almost inconceivable for any nonlinear equation except for some of them. Thus, iterative approaches provide an attractive alternative for solving these kinds of problems. While discussing about the root finding of nonlinear equation of the form
, where
is real function defined in a domain
, we pictured the classical Newton’s method and for multiple roots, the modified Newton method [
4,
5,
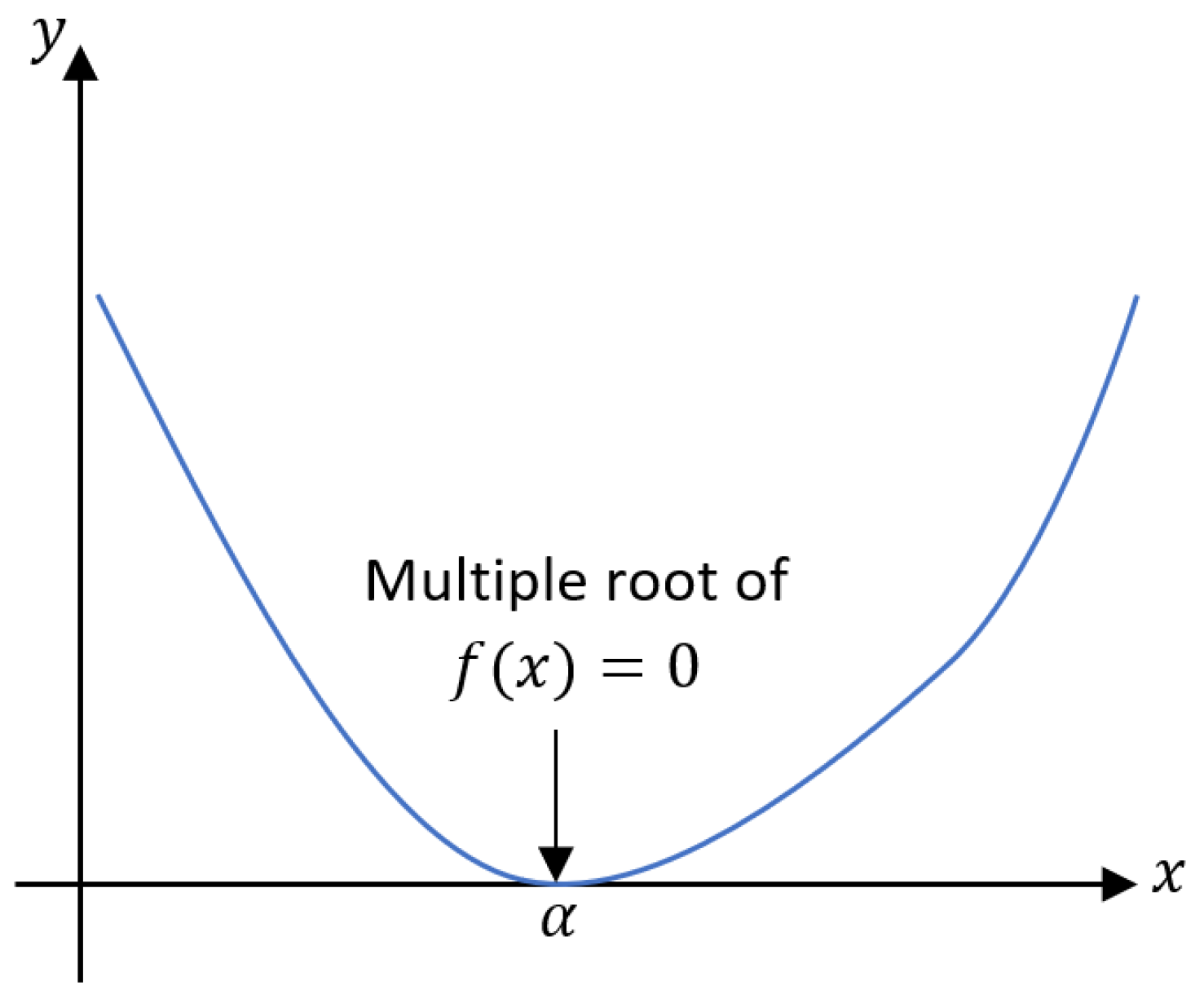
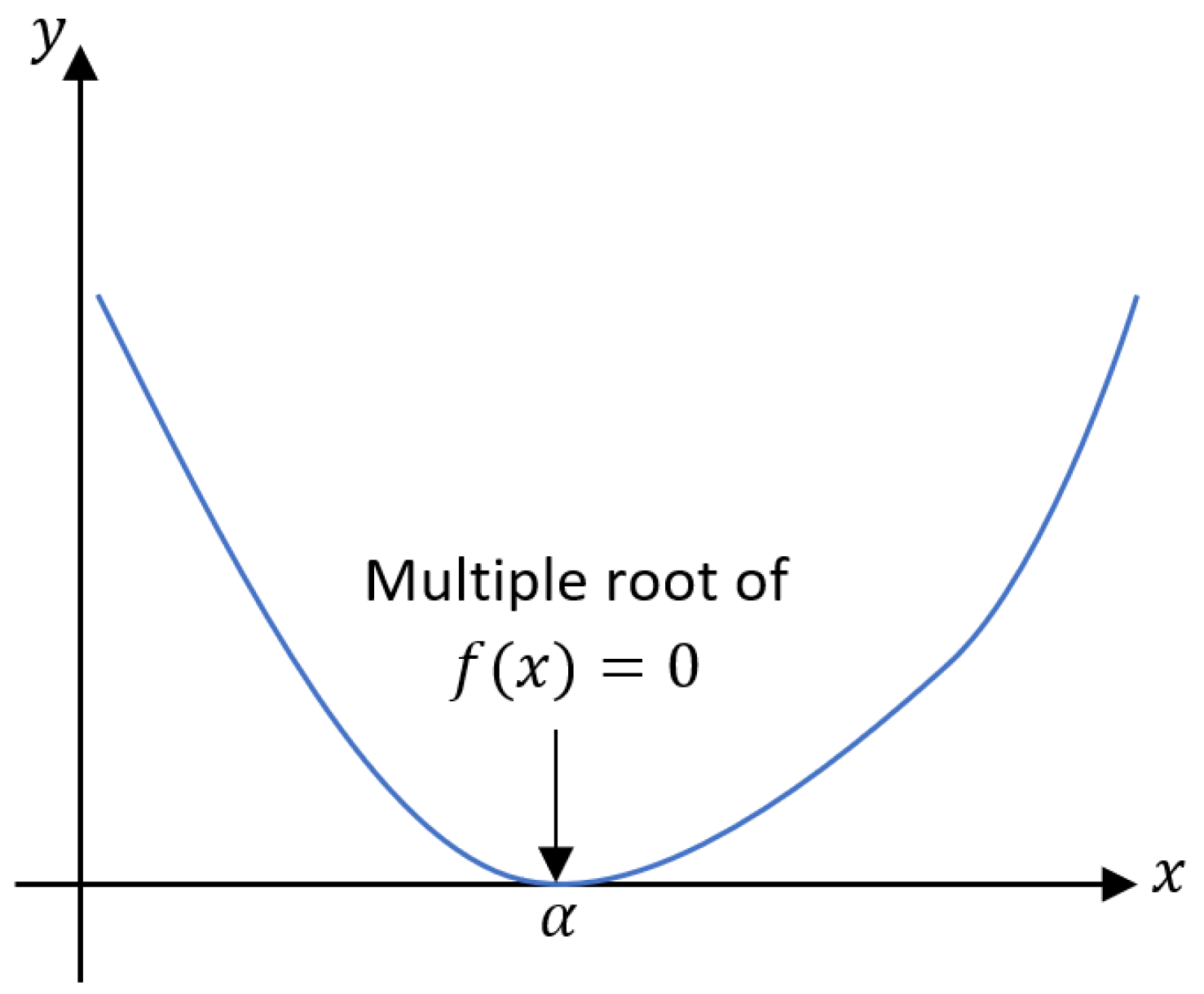
6] (also known as Rall’s method was introduced by E. Schröder in 1870) in mind. The modified Newton method is given by
Equation (
1) converges quadratically for multiple roots with given multiplicity
. Graphically, the sketch of multiple root is visualized from
Figure 1. While, there are several one-point iterative approaches accessible in the literature, but they are not of practical relevance when presented from a real context, because of their theoretical shortcomings on convergence order and efficiency index. Moreover, most of the one-point approaches are computationally expensive and inefficient when evaluated on academic problems that arise from real life. Multipoint iterative approaches are therefore better choices to classify as appropriate solvers. One of the advantages of multipoint iterative methods without memory for scalar nonlinear equations is that we have a conjecture about their convergence order. For any multipoint method, requiring
t functional evaluation can have atmost
convergence order, according to the hypothesis of Kung–Traub conjecture [
5]. For instance, modified Newton method evaluating function at two points, and it reaches to the order
, for given
. Hence, the modified Newton method is optimal in the sense of Kung–Traub Conjecture. Thus, a board community of researchers suggested several optimal [
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19] and non-optimal [
20,
21] multipoint iterative methods for estimating the multiple zeros of a function on the basis of Kung–Traub conjecture. For instance, Li et al. [
9] investigated on the fourth-order scheme for calculating the multiple roots of an equation as follows:
where
, where
m denotes the multiplicity of the desired zero of given function
f.
Sharma and Sharma [
11] suggested the multipoint iterative method of order four, defined below:
where
, and
.
Moreover, Zhou et al. [
12] developed the multipoint iterative method based on the weight function, and one of the particular form is:
Recently, Behl and Hamdan [
22] focused on the extension of Ostrowski’s methods for finding the multiple zeros, and given as:
where
and
is an weight function.
In literature, various researchers analyzed the variants of King’s family for solving the scalar nonlinear equation with multiplicity
. Recently, Behl and Hamdan [
22] extended the Ostrowski’s method for multiple zero of a function. Whereas Sharma and Sharma [
11] focused on the Jarratt’s method and modified it for computing the multiple roots. Till now for multiple zero function, the King’s family were not introduced in literature.
It is a challenging problem in the field of numerical analysis, to construct an optimal scheme of King’s family for approximating the multiple zero of a function. Thus, motivating from this idea, we have made an attempt to extend the King’s family [
23] to optimal multipoint iterative method for obtaining the desire multiple zero of an input function. For this, we used the weight function technique. Furthermore, we have shown that the new method illustrates the good coordination with the numerical section, as it offers the smaller residual errors while estimating the multiple zeros of a function.
The manuscript is organized as follows:
Section 2 first introduces the construction of new fourth-order scheme in general framework and then its theoretical analysis is provided. Moreover, in
Section 3, several special cases are included, depending on the different weight functions used in the developed family. Whereas,
Section 4 is confined to the numerical experiments that highlight the scheme’s effectiveness, accuracy, and stability on some intricate real-life problems.
Section 5, presents the summary and conclusions.
3. Variants of New Family in Equation (6)
It is straightforward to have from Theorem that one can get modified strategies of King’s family by employing some particular values of and by introducing various forms of weight functions.
Case 1. Considering the following polynomial weight function:
where
.
In view of Equation (
20) and scheme in Equation (
6), the new fourth-order optimal family is obtained as follows:
Some of the sub-special cases for Equation (21) (i) When
, and
, the proposed scheme in Equation (
21) read as:
(ii) For
, and
, the family in Equation (
21) becomes:
The above Equation (
23) is another particular case of the scheme in Equation (
6).
Case 2. Choosing the rational weight function as defined below:
and where
, here
is any finite real number. Adopting the weight function in Equation (
24) in the proposed scheme in Equation (
6), we have
which is another new type of multipoint family.
Some of the sub-special cases for Equation (25) (i) For
, and
, the scheme in Equation (
25) reads as
In this way, we obtain another particular form of fourth-order optimal iterative technique.
(ii) For
and
, the family in Equation (
25) leads us
a new optimal 4th-order iterative scheme.
Case 3. Consider the another rational function that defines the weight function as:
where
where
is the finite real value.
By substituting Equation (
28) in Equation (
6), the new optimal family of 4th-order can obtained as follows:
Some of the sub-special cases for the scheme in Equation (29) (i) For
and
, the family in Equation (
6) provides us the special case of Equation (
29)
(ii) For
, and
, the family in Equation (
29) read as
is another new fourth-order optimal multipoint method.
4. Numerical Testing and Discussions
This section is aimed to confirm the theoretical aspects by numerical examination. For this, an attempt is made to demonstrate the comparison of the new approach to practical and academic structures with the existing strategies. For justifying the proposed scheme in Equation (
6), we have compared our new schemes defined in Equation (
26), and Equation (
30) denoted by
, and
, and compared with the existing methods defined in Equations (
2)–(
4), denoted by
,
, and
, respectively. Moreover, the results are compared with the expression in Equation (
5), (for equation number
(32) of article [
22]).
The numerical outcomes are displayed in
Table 1,
Table 2,
Table 3,
Table 4,
Table 5 and
Table 6, by comparing our techniques with existing methods in terms of approximate zeros (
), absolute residual error of the considered function
, absolute difference in two successive approximations
, computational order of convergence
(see [
26,
27]), at the last iteration indices (
t), and computational time (
) in seconds. We have maintained 2000 significant digits of minimum precision to minimize the round off error.
As mentioned within the above description, we determine the value of all the functional residual and the constants till 2000 significant digits, however, we have displayed the value of obtained approximated zero of the function up-to twenty-five significant digits. Whereas, the absolute error in the successive approximations and the residual error exhibited till two significant digits along with the exponent power. Moreover, the computational convergence order is shown up-to five digits. The results are obtained with the help of software (version 11.1, Wolfram Research, Tokyo, Japan).
Note that for calculating the multiplicity m of a root, one may use the following ways:
(i) Traub in [
5] proposed the following approximation formula that
when
x is very close to the multiple root of
f.
(ii) Lagouanelle in [
28] introduced the following expression:
where
x is very close to the multiple root of
f.
Example 1. (Van der Waals equation of state):
Consider the following Van der Waals equation of state:where the parameter and (known as Van der Wall’s constants) depends upon critical temperature, and critical pressure of the specified gas. Evaluate V (volume of the gas) with respect to known values of remaining variables by calculating the solution of the following equation: Thus, the above equations have at least one real root, as it is cubic polynomial. By using the specific values of the parameters, the following nonlinear function of is obtained: having the three zeros: 1.72, 1.75, and 1.75. Thus, the required root is (as multiplicity is two).
The numerical performance presented in
Table 1 shows the better outcomes of the presented methods
, and
with respect to the precision in calculating the multiple root of
, whereas,
is over-performing in terms of accuracy.
Example 2. (Problem of Planck’s radiation law):
Now, consider the defined below problem of Planck’s radiation law which measures the spectral density of electromagnetic radiations released by a black-body at a given temperature, at thermal equilibrium [29] as:where and c denotes the absolute temperature of the black-body, wavelength of radiation, Boltzmann constant, Plank’s constant, and speed of light in the medium (vacuum), respectively. We are interested to determine the wavelength λ which results to the maximum energy density . Further, the first derivative of Φ
is equated to zero, which corresponds to the maximum value of Φ
at: If , then Equation (33) is satisfied when Thus, the solutions of Equation (34), results the maximum values of λ, and is means by the given below expression:where α is a solution of Equation (34). Our desired root is with multiplicity . The numerical outcomes for Equation (34) are illustrated in Table 2. It can be declared by observing the results that the and methods have smaller residual errors in contrast to the existing methods when the accuracy of root is computed in multi-precision arithmetic. Moreover, the time consumed by new methods while computing the results is lesser with respect to other techniques, which justifying the attempt of developing the new scheme. Example 3. (Fractional conversion of a reactant in chemical reactor):
Considering the fractional conversion of a given species A (please, refer to [30] for further details of this problem) in terms of x as If or then there is no significant meaning of the above defined fractional conversion. Which indicates that the x is bounded in its complementary region i.e., . Moreover, this problem is not defined for the , and this region is nearly to the required root . Furthermore, this function has some other properties, which make the solution tougher to estimate. For instance, when , the test problem has an infeasible solution, whereas its derivative is very close to zero for .
The outcomes for this test function are determined in
Table 3. Clearly, it indicates that the proposed scheme works faster than others with greater accuracy. Although,
show higher accuracy but results with higher computational time, whereas our methods results earlier.
Example 4. Continuous stirred tank reactor:
Consider the following sequence of reaction taken place in reactor (for further study, refer [31]) In the above sequence, the components a and R are supplied with the rate t and , respectively to the reactor. For draft of simple feedback from control system, Douglas [32] analyzed this problem in detail and introduced the following expression to study the transfer function of the reactor.where stands for the gain of the proportional controller. The control system is stable for values of that yields roots of the transfer function having negative real part. If we choose , we get the poles of the open-loop transfer function as roots of the nonlinear equation:given as: . Thus, one of root have multiplicity is equal to two. Hence, it is our desired root. From
Table 4, we can observe that the new methods
,
, and the existing
method show equivalent accuracy of the desired result and resulting well with lesser residual error and difference in successive obtained approximations in comparison to the other considered methods. Along with this, numerical convergence order is justifying our theoretical analysis.
Example 5. The characteristic polynomial of non-singular matrixis defined as a function: Clearly, the characteristic function in Equation (40) has one of the zeros with multiplicity . Thus, the desired root is , while testing the schemes. The numerical outcomes of the nonlinear function in Equation (
40) depicts that the newly proposed schemes
and
have splendid outcomes in the view of less residual error and estimation of the convergence order. Moreover, the results are achieved faster than other techniques.
Example 6. Consider the another nonlinear testing sample from [6], as follows: The above test function has one of the multiple zero at with .
The results of this test problem is shown in
Table 6. We can observe from the numerical tests showed in this table that results by presented methods achieve are much effective in minimum time period than its competitors.
Example 7. Kepler’s law of planetary motion says that a plant revolve around sun in a elliptic order. Assume that the point defines the position of plant at time t, which can be evaluated by following expressions:where E stands for eccentric anomaly and e stands for the eccentricity of the ellipse. To determine the position , we need to compute E, which can be calculated by the use of Kepler’s equation of motion:where M is the mean anomaly. The above equation relates the mean anomaly M to the eccentric anomaly E of an elliptic orbit with eccentricity e. Thus to compute E, one can solve the following nonlinear function For testing the various iterative methods, we consider , , and initial approximation as . The approximate zero of the function defined in above equation is . The results are demonstrated in Table 7, which manifest that the proposed methods are winning in each aspects of comparisons. 



{kind=link}