Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
- (1)
- A novel sliding surface is proposed for an extended nth order single input–single output (SISO) system with arbitrarily unknown matched/unmatched uncertainties.
- (2)
- An efficient LPO are presented to approximate the true lumped perturbations produced by arbitrarily unknown uncertainties/disturbances in all channels of a SISO system through the presented multiple surfaces. Following this, a robust controller is designed, to guarantee a strong stability of the control system under the variation of disturbance.
- (3)
- The steps of designing the proposed controller and LPO do not require any knowledge of bound conditions of matched and unmatched uncertainties.
2. Problem Formulation
3. Main Results
3.1. Robust Controller Design
3.2. Lumped Perturbation Observer (LPO)
4. Stability Analysis
- *
- The convergence of a sliding surface,, is analyzed through a Lyapunov function chosen by:
- *
- The convergence of sliding surfaces,, (i = 1, 2,…, n−1) is analyzed by:
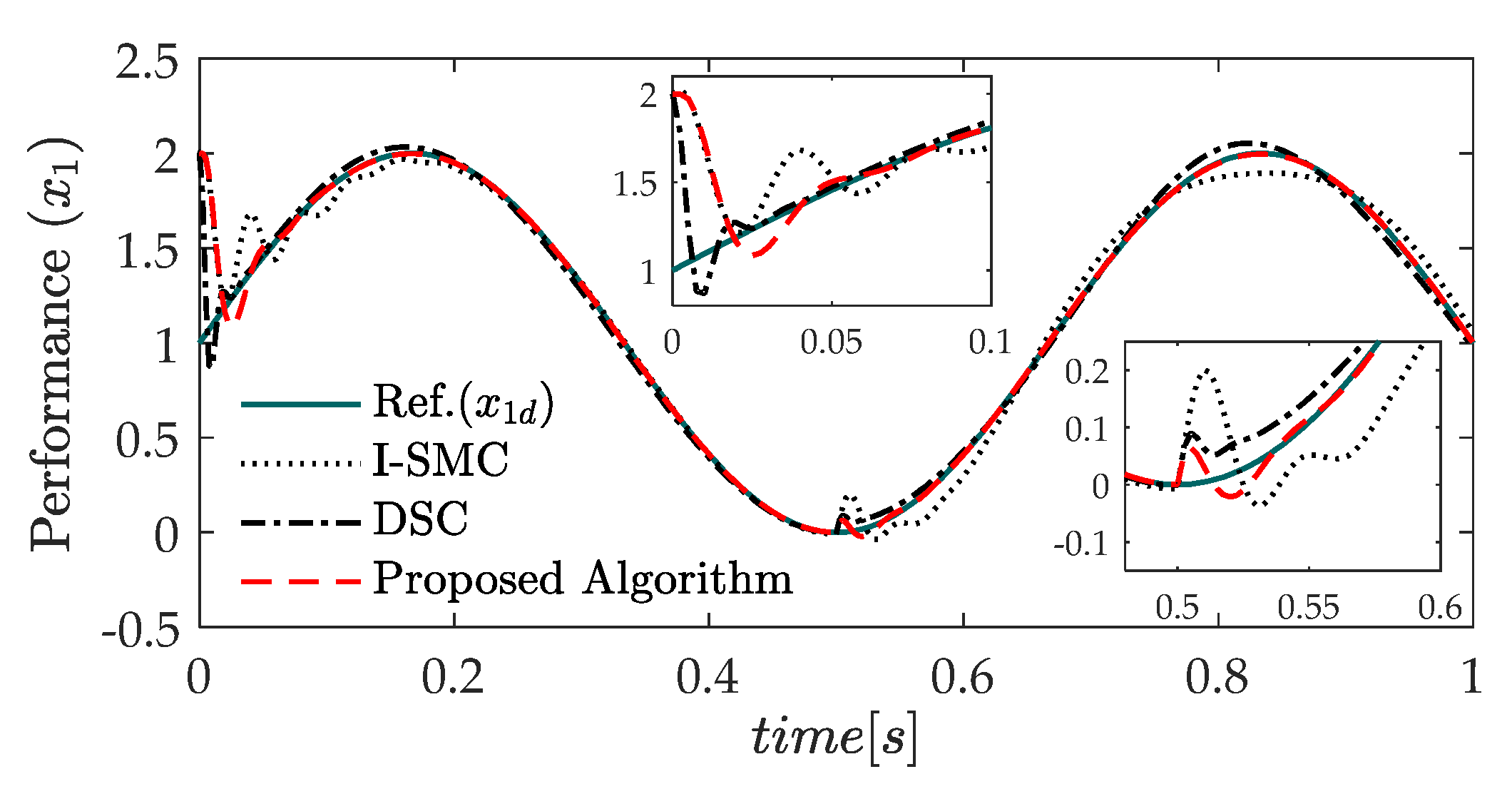
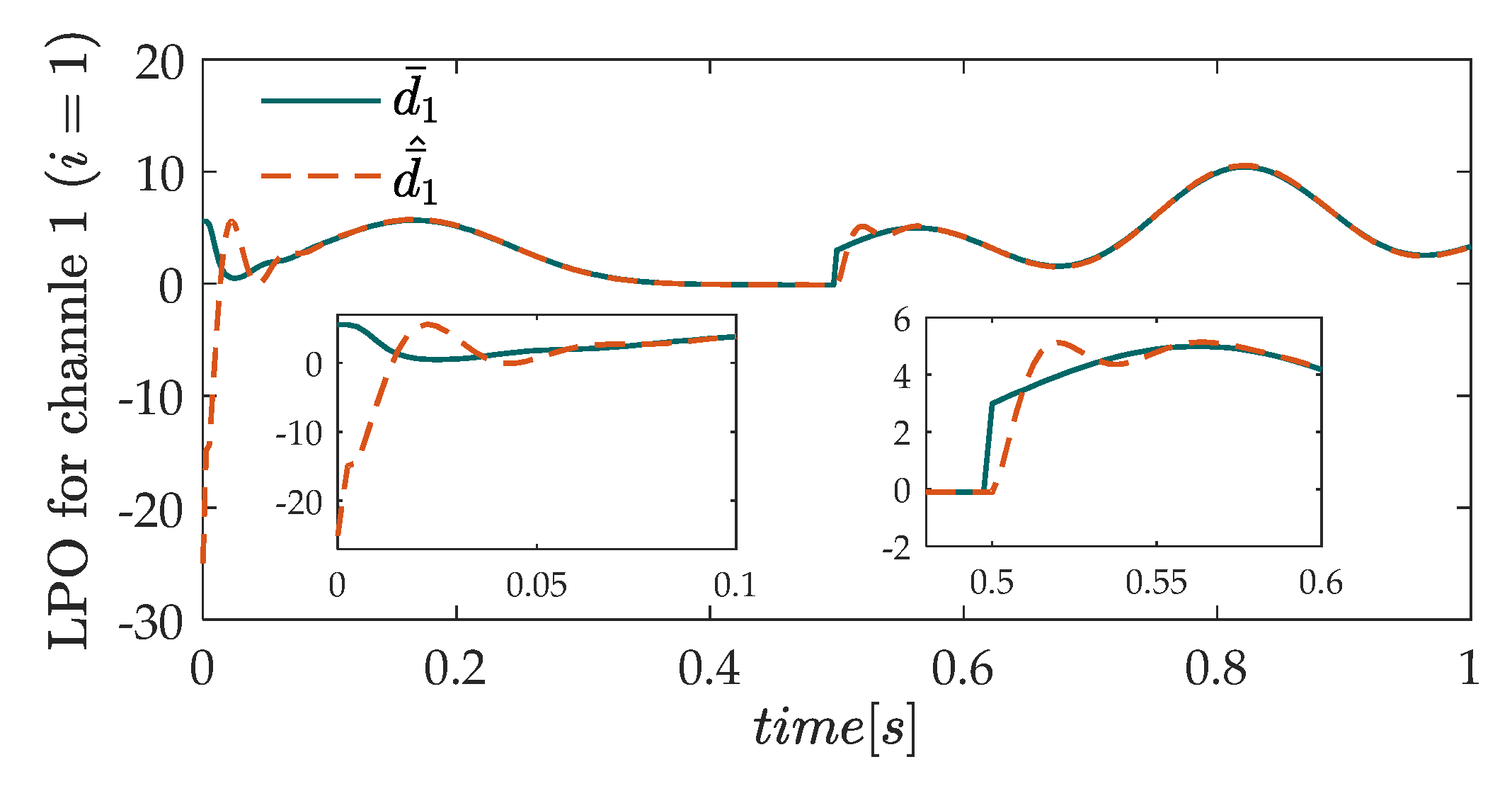
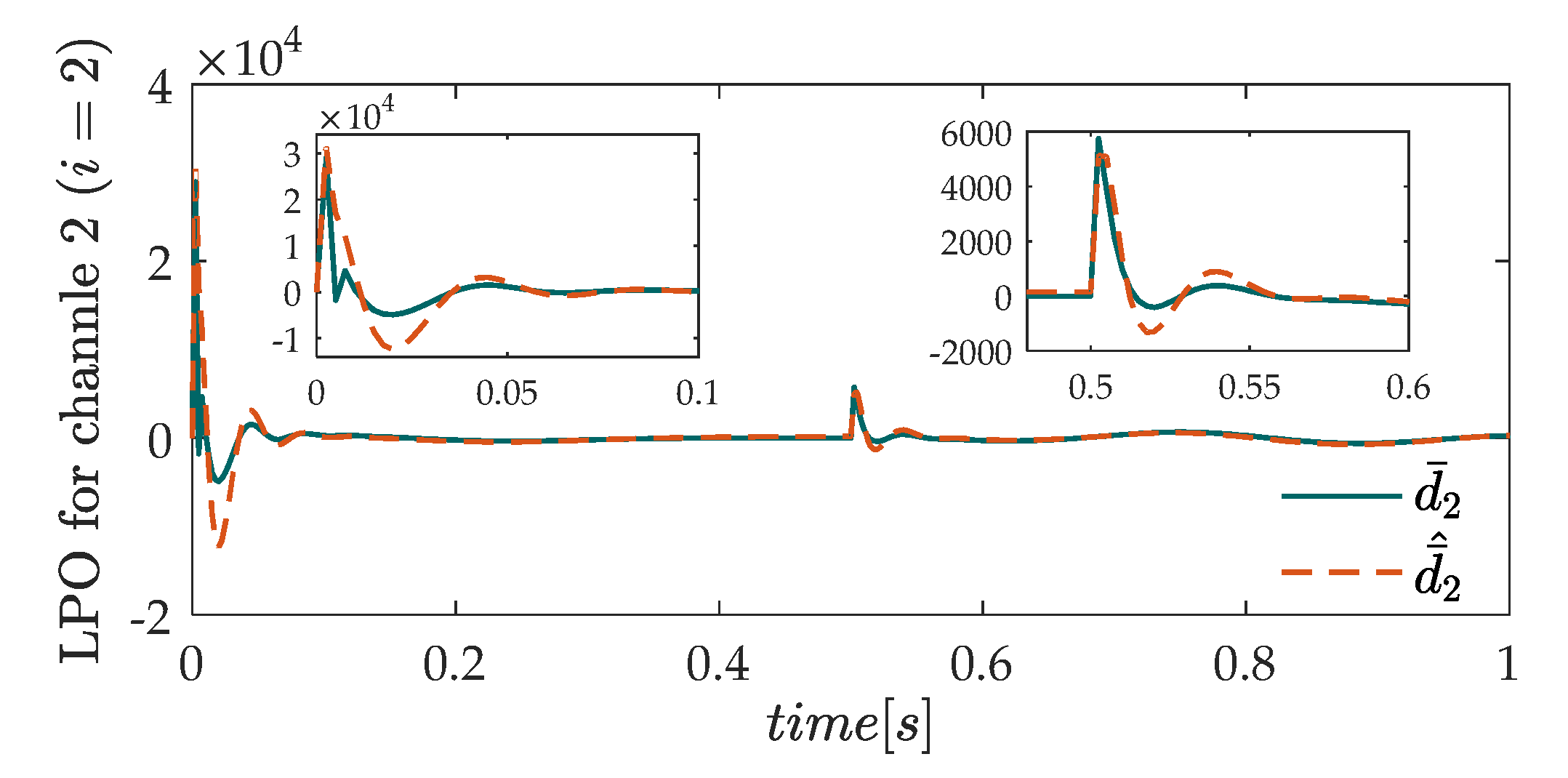
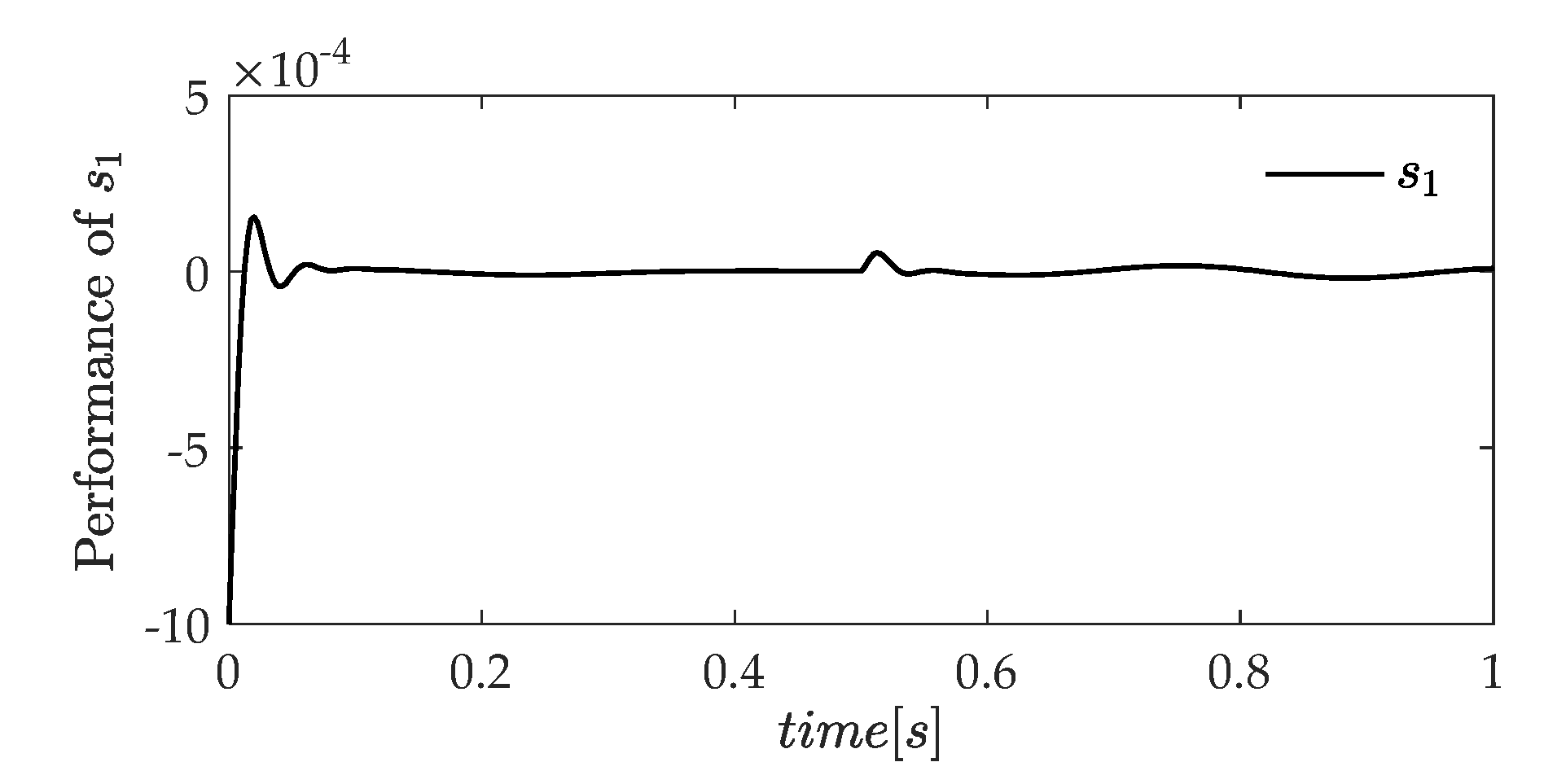
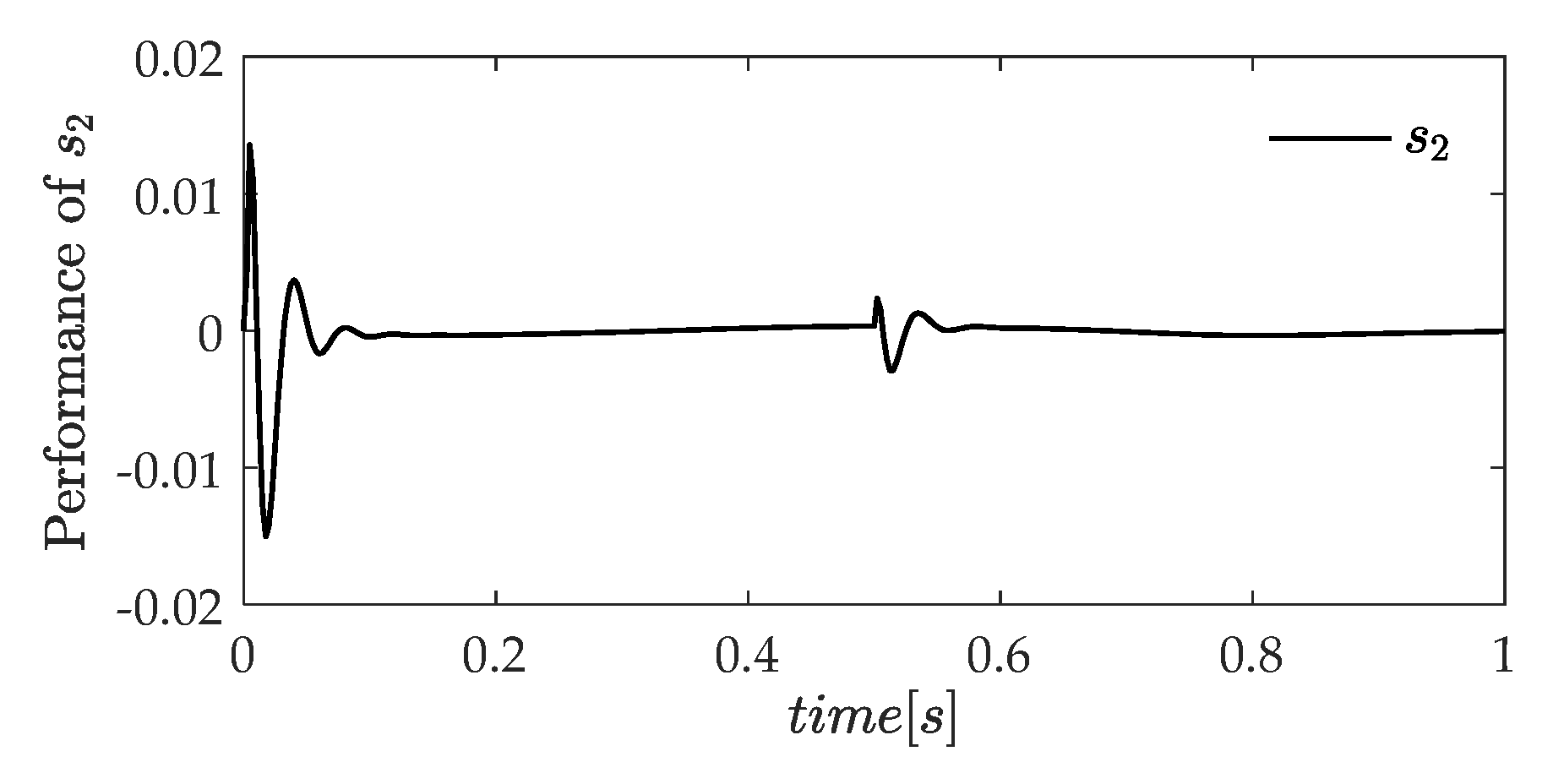
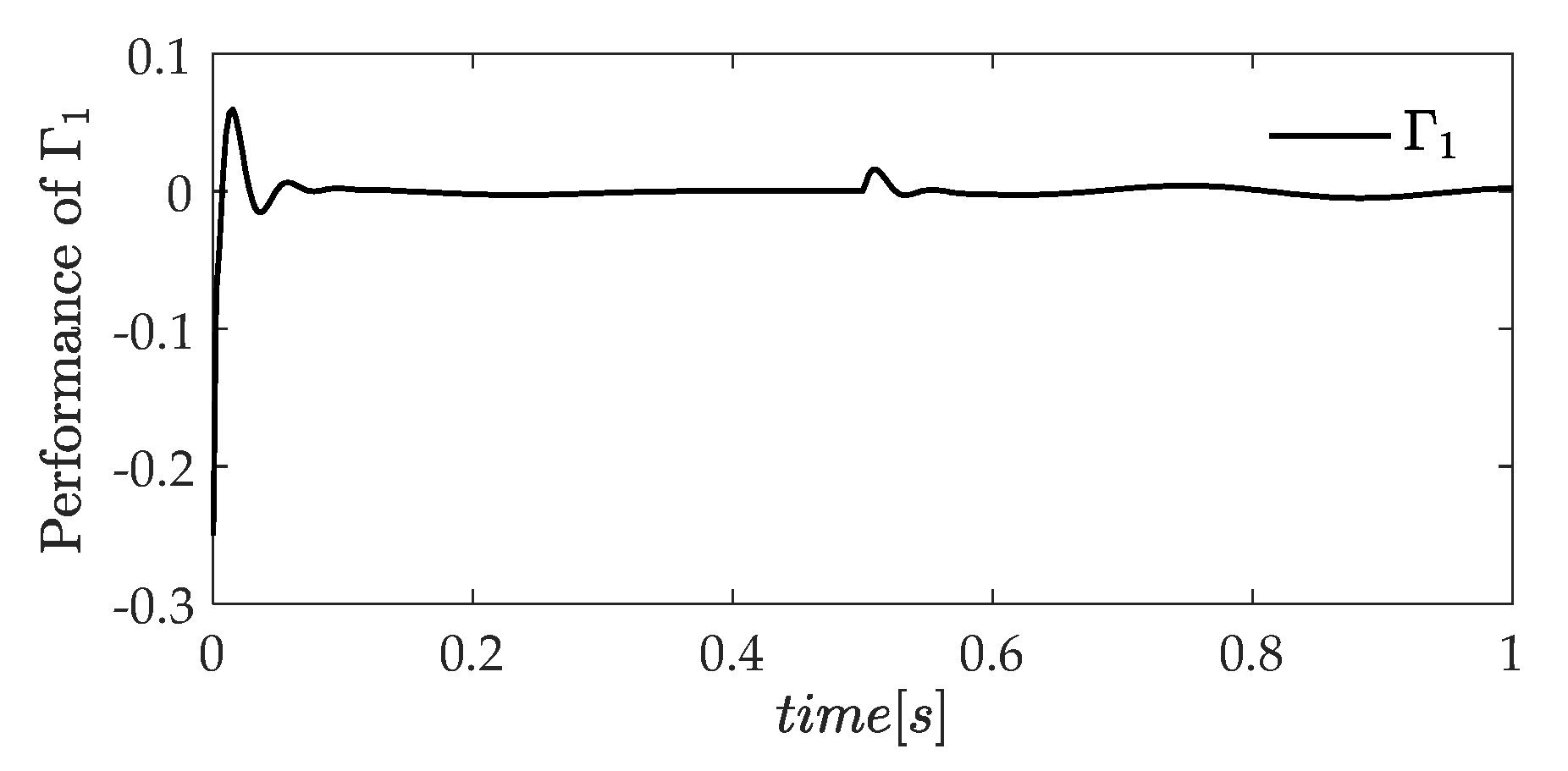
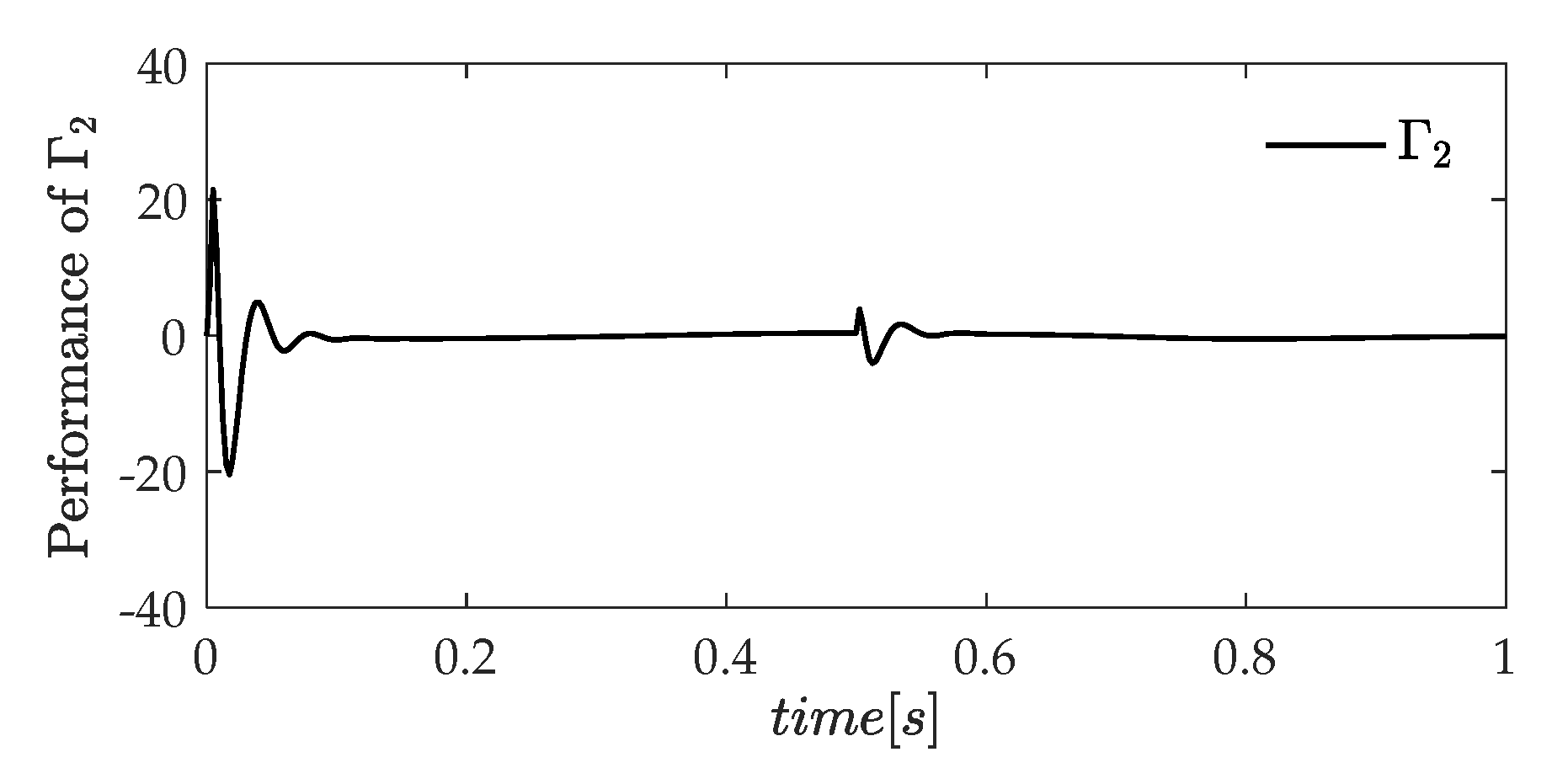
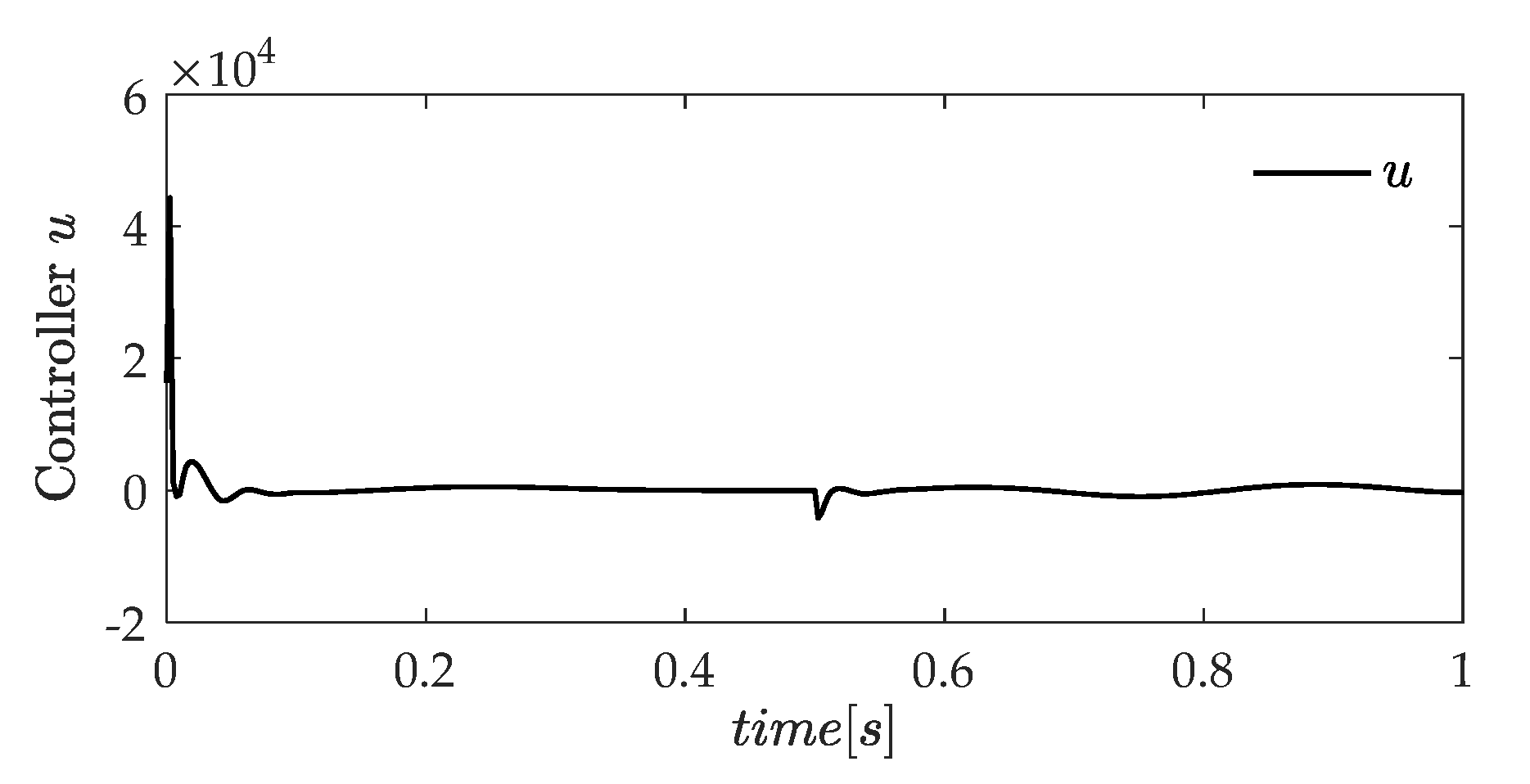
5. Simulation Results and Discussions
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Precup, R.-E.; Radac, M.-B.; Roman, R.-C.; Petriu, E.M. Model-free sliding mode control of nonlinear systems: Algorithms and experiments. Inf. Sci. 2017, 381, 176–192. [Google Scholar] [CrossRef]
- Barmish, B.R.; Leitmann, G. On ultimate boundedness control of uncertain systems in the absence of matching condition. IEEE Trans. Autom. Control 1982, 27, 153–158. [Google Scholar] [CrossRef]
- Arefi, M.M.; Jahed-Motlagh, M.R.; Karimi, H.R. Adaptive Neural Stabilizing Controller for a Class of Mismatched Uncertain Nonlinear Systems by State and Output Feedback. IEEE Trans. Cybern. 2014, 45, 1587–1596. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.H. An LMI-based switching surface design method for a class of mismatched uncertain systems. IEEE Trans. Autom. Control 2003, 48, 1634–1638. [Google Scholar] [CrossRef]
- Kim, K.-S.; Park, Y.; Oh, S.-H. Designing robust sliding hyperplanes for parametric uncertain systems: A Riccati approach. Automatica 2000, 36, 1041–1048. [Google Scholar] [CrossRef]
- Wen, C.-C.; Cheng, C.-C. Design of sliding surface for mismatched uncertain systems to achieve asymptotical stability. J. Frankl. Inst. 2008, 345, 926–941. [Google Scholar] [CrossRef]
- Zhai, D.; An, L.; Ye, D.; Zhang, Q. Adaptive Reliable H∞ Static Output Feedback Control Against Markovian Jumping Sensor Failures. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 631–644. [Google Scholar] [CrossRef]
- Chang, Y. Adaptive Sliding Mode Control of Multi-Input Nonlinear Systems with Perturbations to Achieve Asymptotical Stability. IEEE Trans. Autom. Control 2009, 54, 2863–2869. [Google Scholar] [CrossRef]
- Zhai, D.; An, L.; Dong, J.; Zhang, Q. Output feedback adaptive sensor failure compensation for a class of parametric strict feedback systems. Automatica 2018, 97, 48–57. [Google Scholar] [CrossRef]
- Mehdi, H.; Mohammad, J.Y. Performance enhanced model reference adaptive control through switching non-quadratic Lyapunov functions. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar]
- Lu, C.; Hua, L.; Zhang, X.; Wang, H.; Guo, Y. Adaptive Sliding Mode Control Method for Z-Axis Vibrating Gyroscope Using Prescribed Performance Approach. Appl. Sci. 2020, 10, 4779. [Google Scholar] [CrossRef]
- Choi, H.H. LMI-Based Sliding Surface Design for Integral Sliding Mode Control of Mismatched Uncertain Systems. IEEE Trans. Autom. Control 2007, 52, 736–742. [Google Scholar] [CrossRef]
- Abo-Hammour, Z.S.; Abu Arqub, O.; Alsmadi, O.; Momani, S.; Alsaedi, A. An Optimization Algorithm for Solving Systems of Singular Boundary Value Problems. Appl. Math. Inf. Sci. 2014, 8, 2809–2821. [Google Scholar] [CrossRef]
- Yang, J.; Mu, A. Adaptive Fixed Time Control for Generalized Synchronization of Mismatched Dynamical Systems with Parametric Estimations. IEEE Access 2019, 7, 114426–114439. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Al-Rayyah, A. Adaptive control of systems with mismatched non-linearities and time-varying delays using state measurements. IET Control Theory Appl. 2010, 4, 27–36. [Google Scholar] [CrossRef]
- Zhai, D.; An, L.; Dong, J.; Zhang, Q. Robust Adaptive Fuzzy Control of a Class of Uncertain Nonlinear Systems with Unstable Dynamics and Mismatched Disturbances. IEEE Trans. Cybern. 2017, 48, 3105–3115. [Google Scholar] [CrossRef]
- Rahmani, M.; Komijani, H.; Ghanbari, A.; Ettefagh, M.M. Optimal novel super-twisting PID sliding mode control of a MEMS gyroscope based on multi-objective bat algorithm. Microsyst. Technol. 2018, 24, 2835–2846. [Google Scholar] [CrossRef]
- Xu, Q. Digital Integral Terminal Sliding Mode Predictive Control of Piezoelectric-Driven Motion System. IEEE Trans. Ind. Electron. 2015, 63, 3976–3984. [Google Scholar] [CrossRef]
- Yu, X.; Kaynak, O. Sliding-Mode Control with Soft Computing: A Survey. IEEE Trans. Ind. Electron. 2009, 56, 3275–3285. [Google Scholar] [CrossRef]
- Cao, W.-J.; Xu, J.-X. Nonlinear Integral-Type Sliding Surface for both Matched and Unmatched Uncertain Systems. IEEE Trans. Autom. Control 2004, 49, 1355–1360. [Google Scholar] [CrossRef]
- Huang, A.-C.; Chen, Y.-C. Adaptive Sliding Control for Single-Link Flexible-Joint Robot with Mismatched Uncertainties. IEEE Trans. Control Syst. Technol. 2004, 12, 770–775. [Google Scholar] [CrossRef]
- Shieh, H.-J.; Shyu, K.-K. Nonlinear sliding-mode torque control with adaptive backstepping approach for induction motor drive. IEEE Trans. Ind. Electron. 1999, 46, 380–389. [Google Scholar] [CrossRef]
- Estrada, A.; Fridman, L. Quasi-continuous HOSM control for systems with unmatched perturbations. Automatica 2010, 46, 1916–1919. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.; Yip, P.P.; Gerdes, J. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Zhang, Q.; Yan, X.-G.; Spurgeon, S. Observer-Based Fuzzy Integral Sliding Mode Control For Nonlinear Descriptor Systems. IEEE Trans. Fuzzy Syst. 2018, 26, 2818–2832. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Liu, G.; Fang, J. Feedback Linearization and Extended State Observer-Based Control for Rotor-AMBs System with Mismatched Uncertainties. IEEE Trans. Ind. Electron. 2017, 64, 1313–1322. [Google Scholar] [CrossRef]
- Zheng, W.; Li, S.; Wang, J.; Wang, Z. Sliding-mode control for three phase PWM inverter via harmonic disturbance observer. In Proceedings of the 4th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 7988–7993. [Google Scholar]
- Wei, X.; Guo, L. Composite disturbance-observer-based control and terminal sliding mode control for non-linear systems with disturbances. Int. J. Control 2009, 82, 1082–1098. [Google Scholar] [CrossRef]
- Chen, M.; Chen, W.-H. Sliding mode control for a class of uncertain nonlinear system based on disturbance observer. Int. J. Adapt. Control Signal Process. 2009, 24, 51–64. [Google Scholar] [CrossRef]
- Lu, Y.-S.; Chiu, C.-W. A stability-guaranteed integral sliding disturbance observer for systems suffering from disturbances with bounded first time derivatives. Int. J. Control Autom. Syst. 2011, 9, 402–409. [Google Scholar] [CrossRef]
- Wu, S.N.; Sun, X.Y.; Sun, Z.W.; Wu, X.D. Sliding-mode control for staring-mode spacecraft using a disturbance observer. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2010, 224, 215–224. [Google Scholar] [CrossRef]
- Chen, W.-H. Disturbance Observer Based Control for Nonlinear Systems. IEEE/ASME Trans. Mechatron. 2004, 9, 706–710. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.-H.; Ballance, D.; Gawthrop, P.J.; O’Reilly, J. A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 2000, 47, 932–938. [Google Scholar] [CrossRef] [Green Version]
- An, H.; Liu, J.; Wang, C.; Wu, L. Disturbance Observer-Based Antiwindup Control for Air-Breathing Hypersonic Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3038–3049. [Google Scholar] [CrossRef]
- Chen, W.-H. Nonlinear Disturbance Observer-Enhanced Dynamic Inversion Control of Missiles. J. Guid. Control Dyn. 2003, 26, 161–166. [Google Scholar] [CrossRef]
- Ginoya, D.; Shendge, P.D.; Phadke, S.B. Sliding Mode Control for Mismatched Uncertain Systems Using an Extended Disturbance Observer. IEEE Trans. Ind. Electron. 2014, 61, 1983–1992. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Yu, X. Sliding-Mode Control for Systems with Mismatched Uncertainties via a Disturbance Observer. IEEE Trans. Ind. Electron. 2012, 60, 160–169. [Google Scholar] [CrossRef]
- Ngo, P.D.; Shin, Y.C. Modeling of unstructured uncertainties and robust controlling of nonlinear dynamic systems based on type-2 fuzzy basis function networks. Eng. Appl. Artif. Intell. 2016, 53, 74–85. [Google Scholar] [CrossRef]
- Kayacan, E. Sliding mode control for systems with mismatched time-varying uncertainties via a self-learning disturbance observer. Trans. Inst. Meas. Control 2018, 41, 2039–2052. [Google Scholar] [CrossRef]
- Hou, L.; Li, W.; Shen, H.; Li, T. Fuzzy Sliding Mode Control for Systems With Matched and Mismatched Uncertainties/Disturbances Based on ENDOB. IEEE Access 2018, 7, 666–673. [Google Scholar] [CrossRef]
- Ha, T.; Hong, S.K. Quadcopter Robust Adaptive Second Order Sliding Mode Control Based on PID Sliding Surface. IEEE Access 2018, 6, 66850–66860. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Value | 250 | 1300 | 0.1 | 0.5 | 0.001 | 0.01 | 0.001 | 0.07 | 20 | 50 | 80 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thanh, H.L.N.N.; Vu, M.T.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics 2020, 8, 1371. https://doi.org/10.3390/math8081371
Thanh HLNN, Vu MT, Mung NX, Nguyen NP, Phuong NT. Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics. 2020; 8(8):1371. https://doi.org/10.3390/math8081371
Chicago/Turabian StyleThanh, Ha Le Nhu Ngoc, Mai The Vu, Nguyen Xuan Mung, Ngoc Phi Nguyen, and Nguyen Thanh Phuong. 2020. "Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties" Mathematics 8, no. 8: 1371. https://doi.org/10.3390/math8081371