An Efficient and Accurate Method for the Conservative Swift–Hohenberg Equation and Its Numerical Implementation

Abstract
:1. Introduction
2. Linear, High-Order, and Mass Conservative Method
3. Numerical Experiments
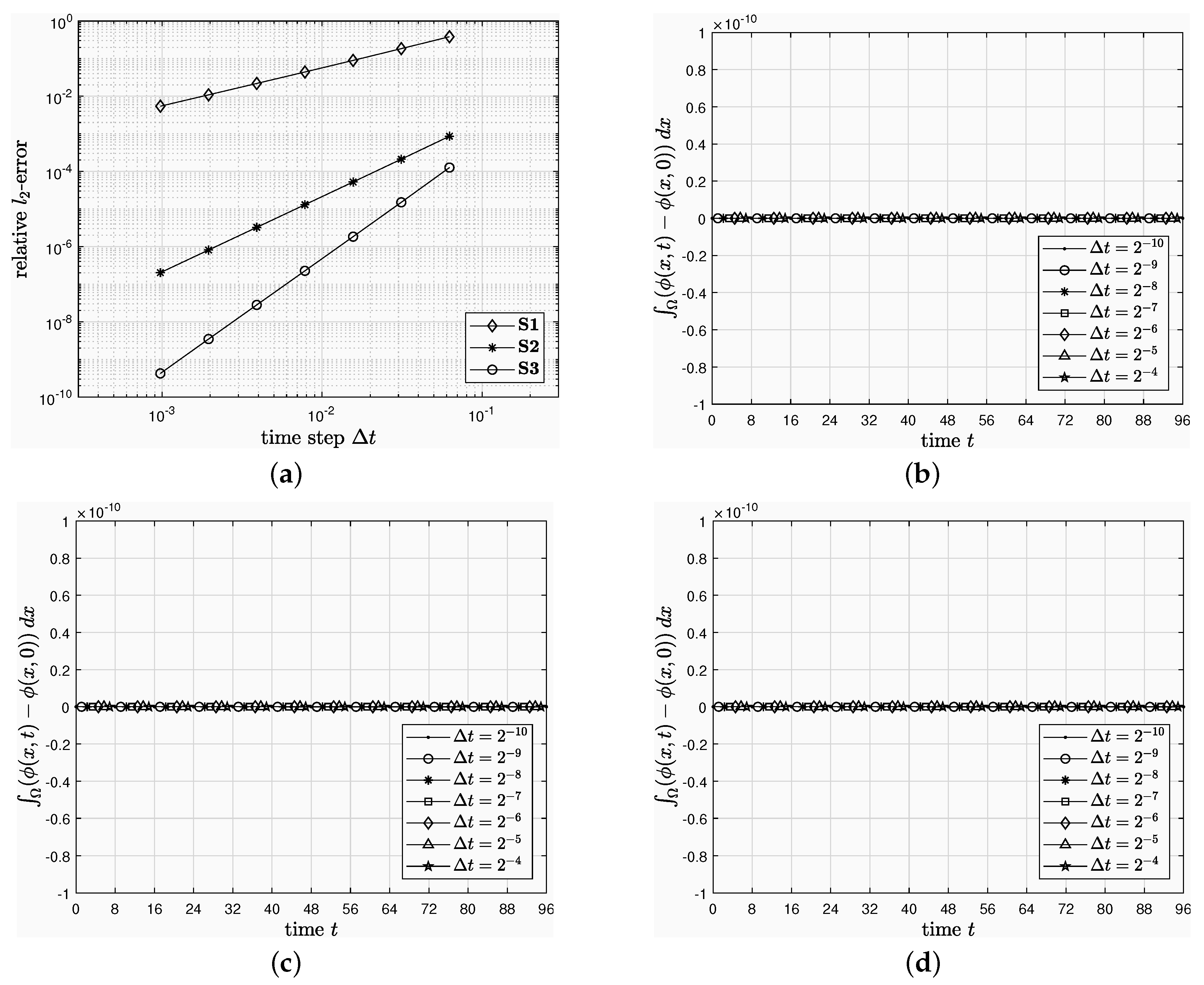
3.1. Convergence Test
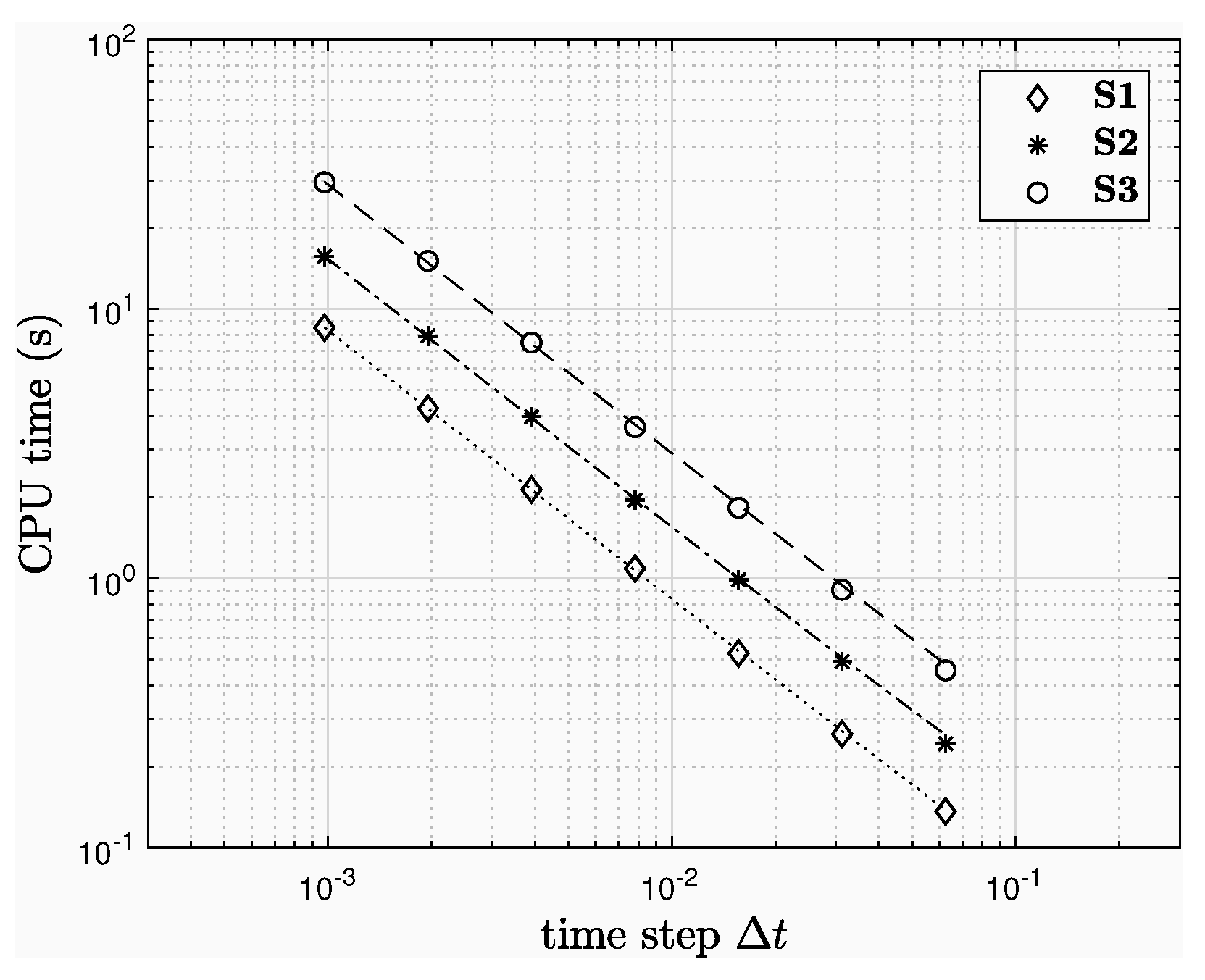
3.2. Efficiency of the Proposed Method
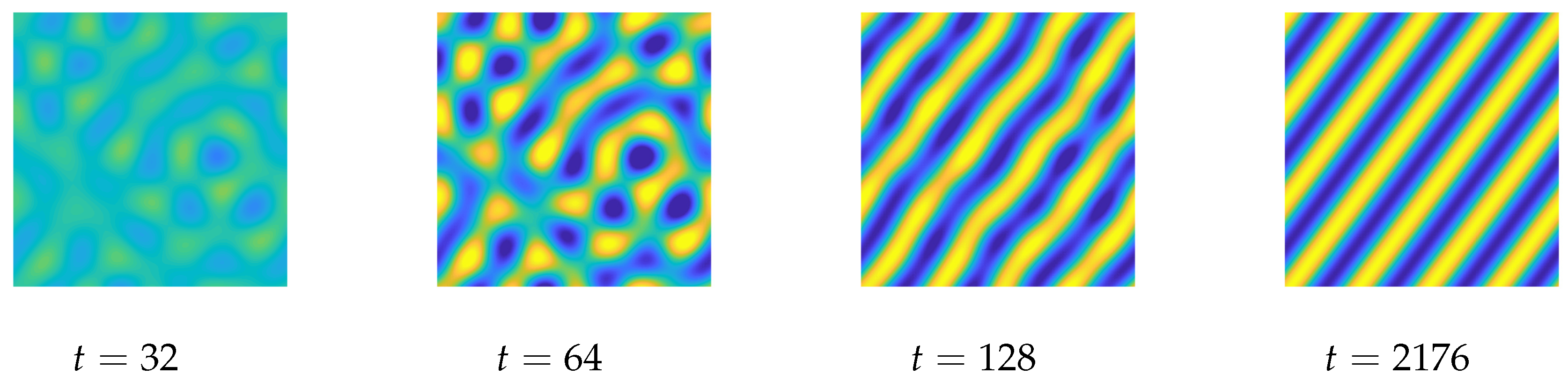
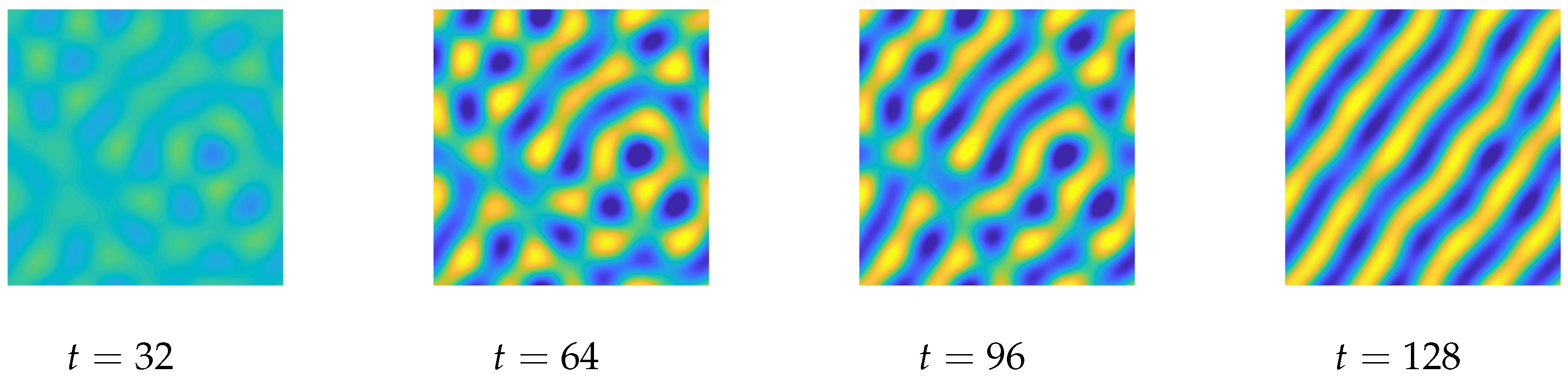
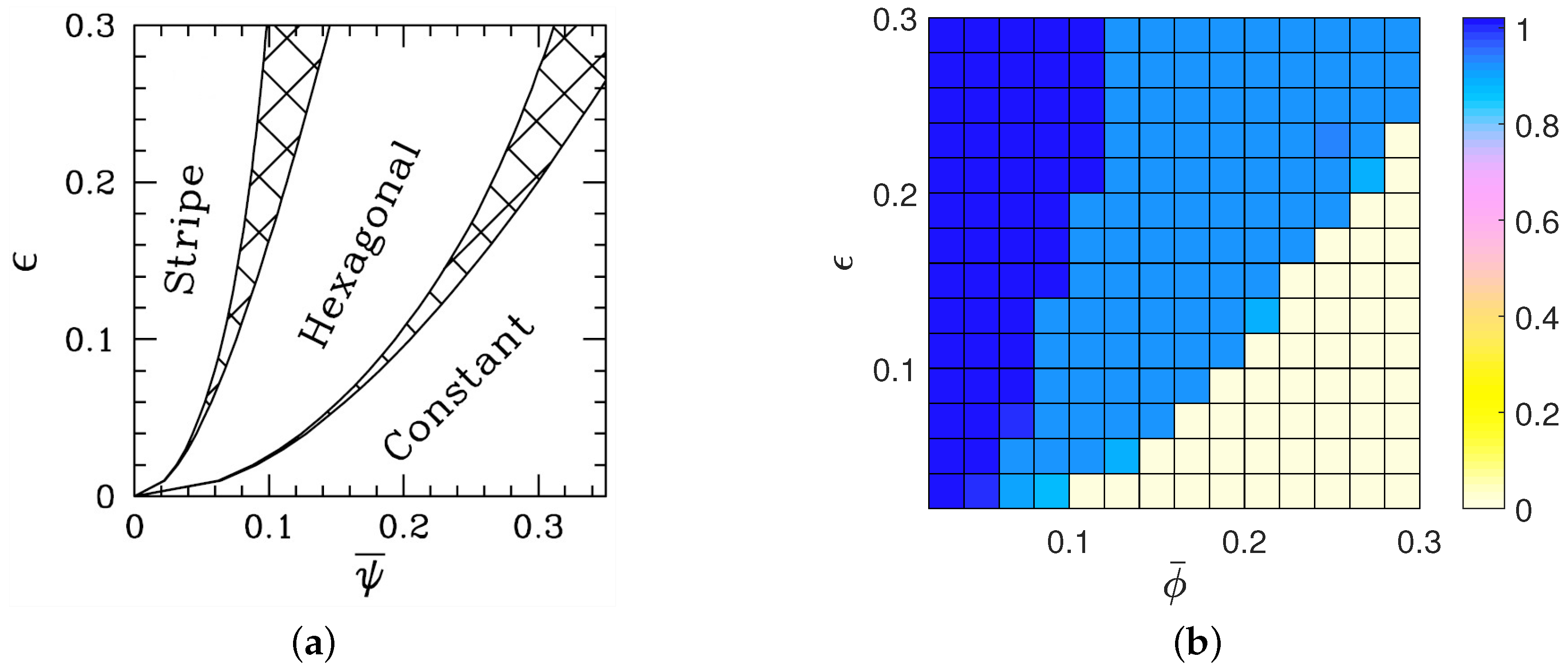
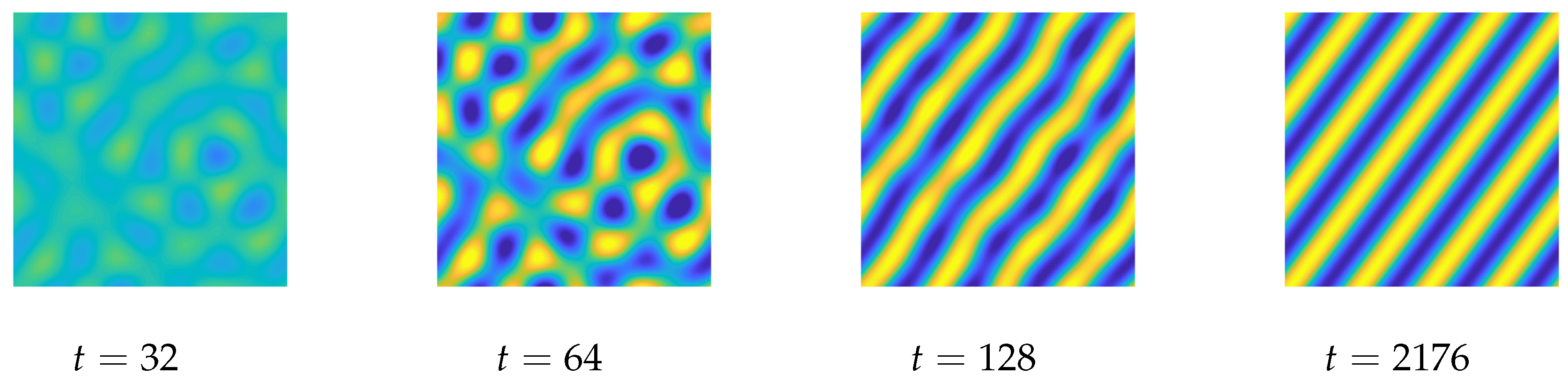
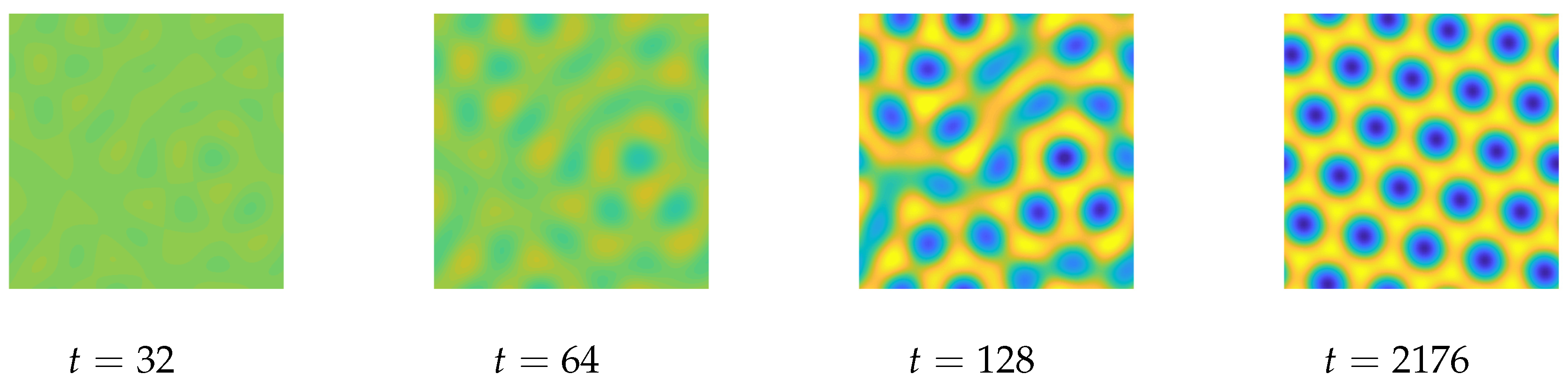
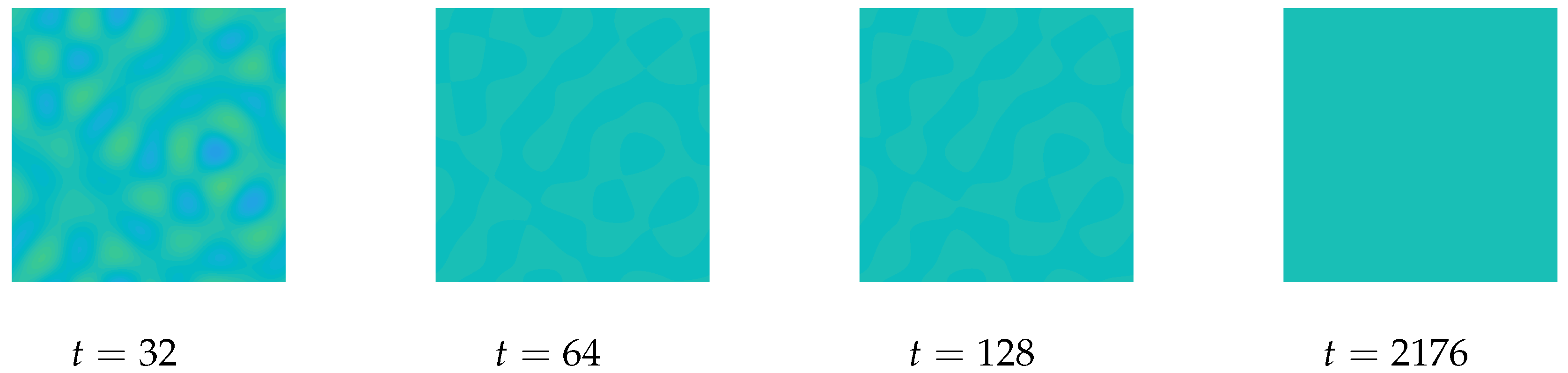
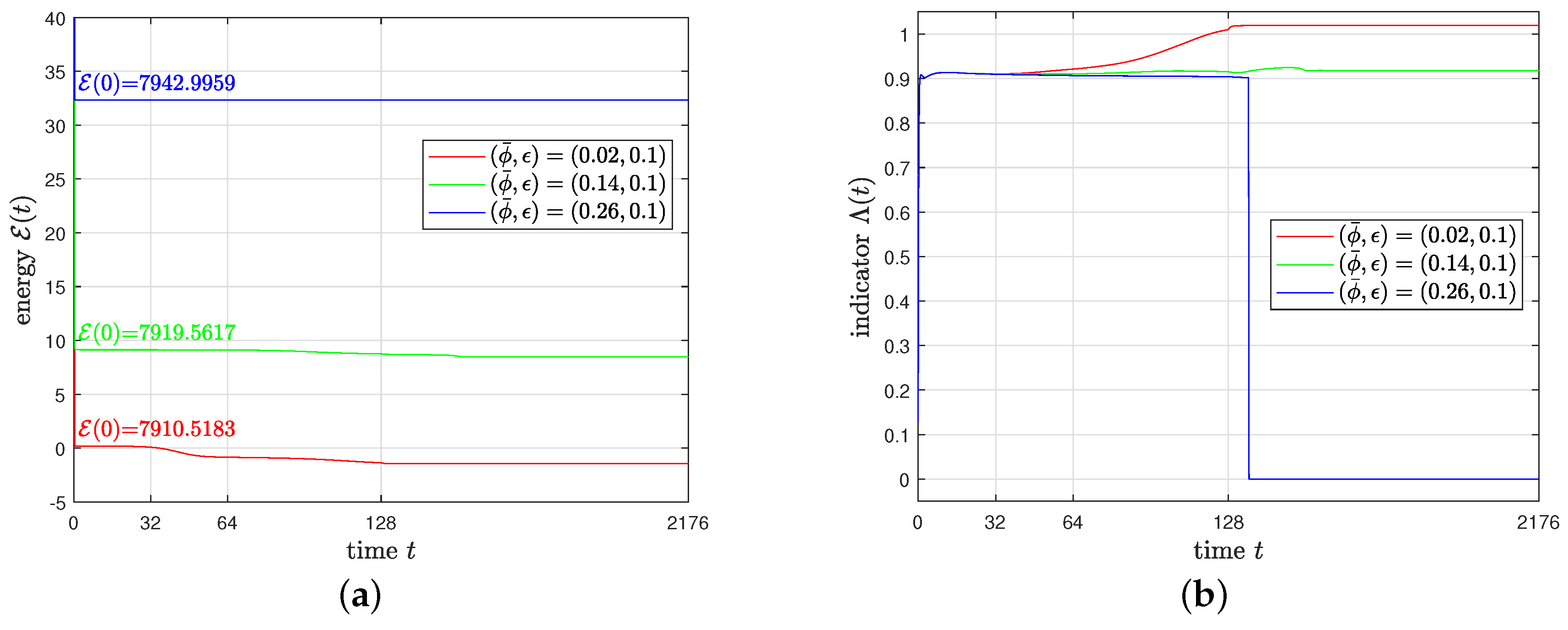
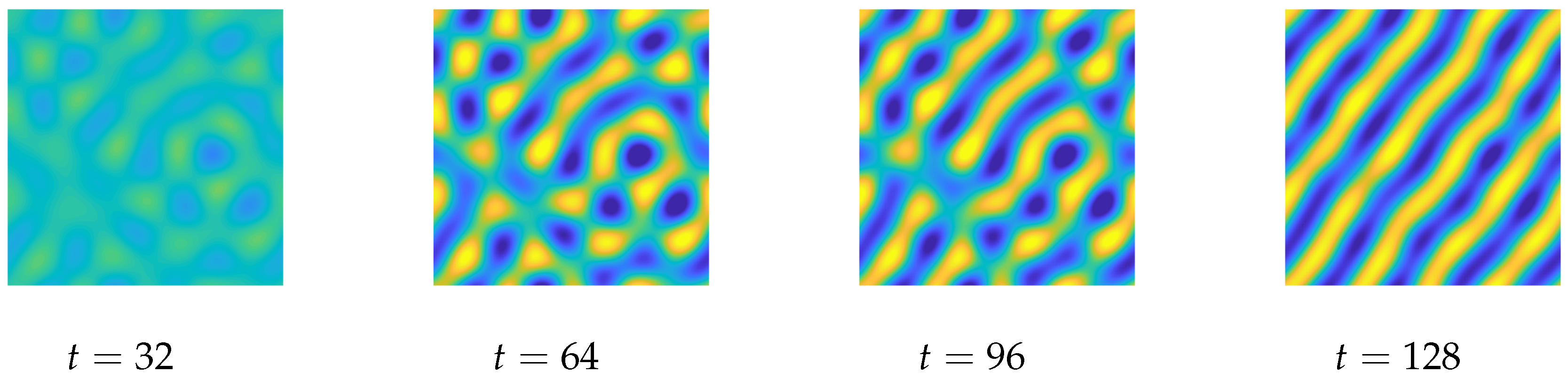
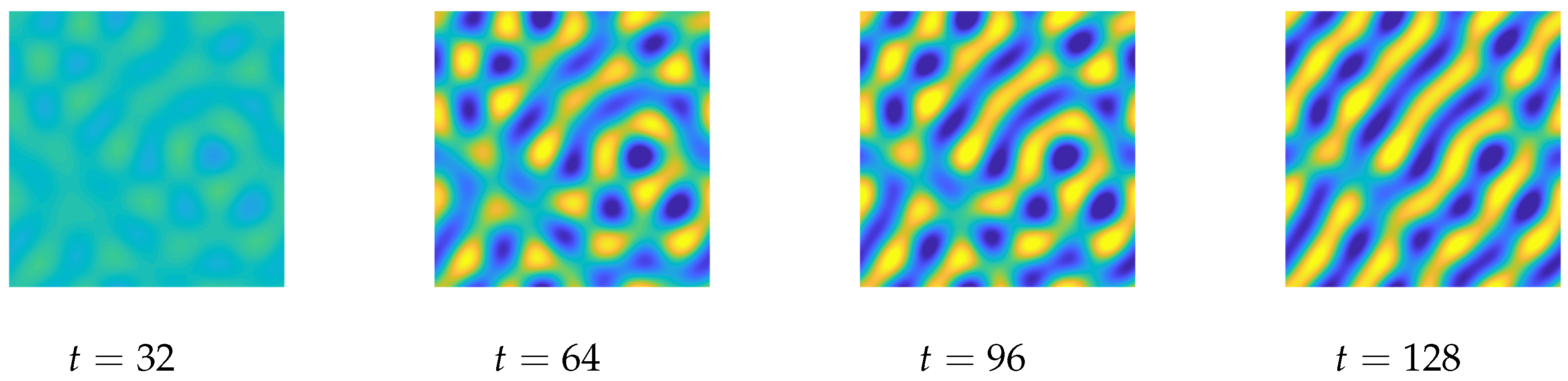
3.3. Phase Diagram in 2D
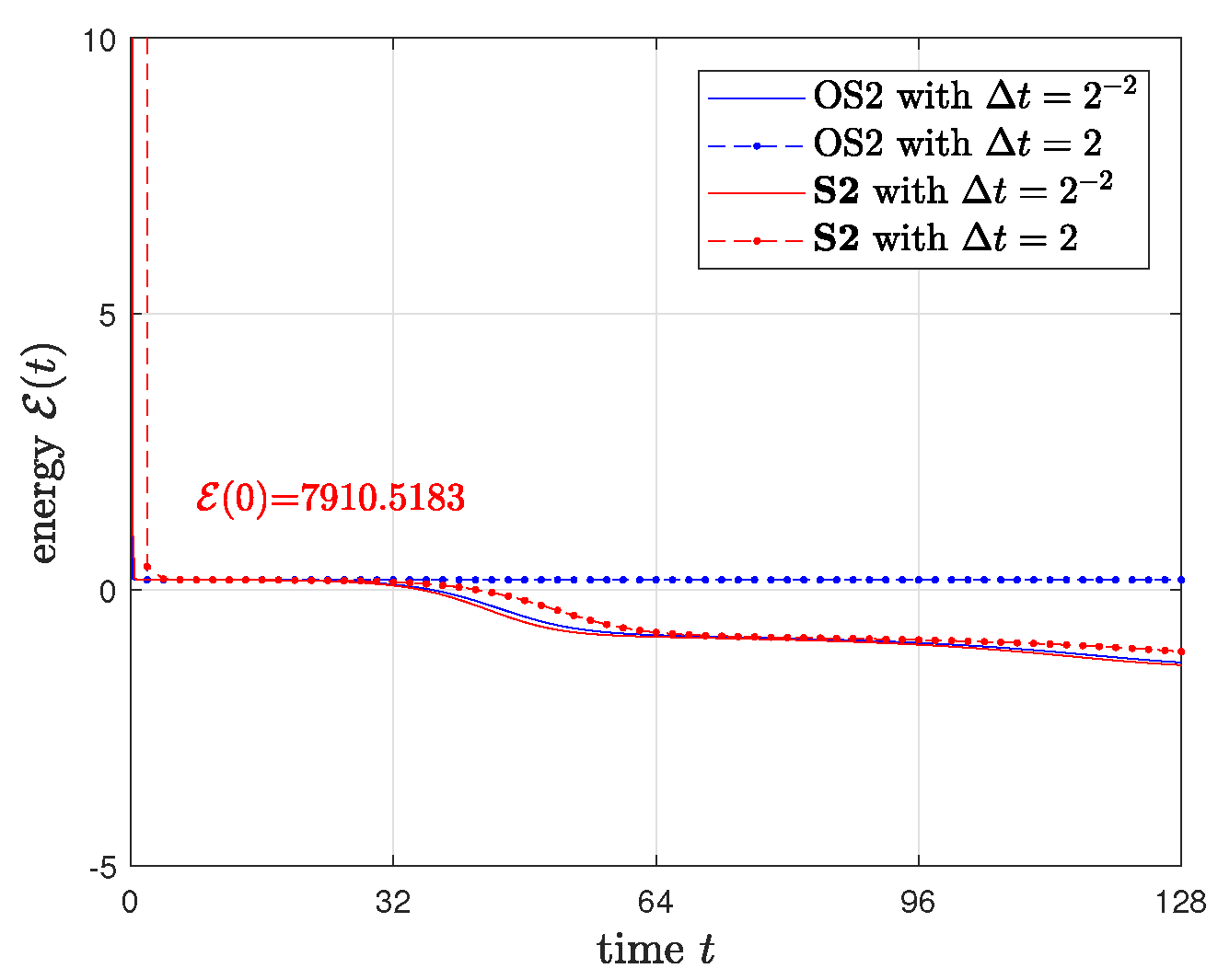
3.4. Comparison with Other Method
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Matlab Code


References
- Elder, K.R.; Katakowski, M.; Haataja, M.; Grant, M. Modeling elasticity in crystal growth. Phys. Rev. Lett. 2002, 88, 245701. [Google Scholar] [CrossRef] [Green Version]
- Elder, K.R.; Grant, M. Modeling elastic and plastic deformations in nonequilibrium processing using phase field crystals. Phys. Rev. E 2004, 70, 051605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Swift, J.; Hohenberg, P.C. Hydrodynamic fluctuations at the convective instability. Phys. Rev. A 1977, 15, 319–328. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Yang, X. Numerical approximations for a new L2-gradient flow based Phase field crystal model with precise nonlocal mass conservation. Comput. Phys. Commun. 2019, 243, 51–67. [Google Scholar] [CrossRef]
- Lee, H.G. A new conservative Swift-Hohenberg equation and its mass conservative method. J. Comput. Appl. Math. 2020, 375, 112815. [Google Scholar] [CrossRef]
- Ascher, U.M.; Ruuth, S.J.; Spiteri, R.J. Implicit-explicit Runge-Kutta methods for time-dependent partial differential equations. Appl. Numer. Math. 1997, 25, 151–167. [Google Scholar] [CrossRef]
- Lee, H.G. A semi-analytical Fourier spectral method for the Swift-Hohenberg equation. Comput. Math. Appl. 2017, 74, 1885–1896. [Google Scholar] [CrossRef]
- Lee, H.G. An energy stable method for the Swift-Hohenberg equation with quadratic-cubic nonlinearity. Comput. Methods Appl. Mech. Eng. 2019, 343, 40–51. [Google Scholar] [CrossRef]
- Chen, X.; Song, M.; Song, S. A fourth order energy dissipative scheme for a traffic flow model. Mathematics 2020, 8, 1238. [Google Scholar] [CrossRef]
- Yoon, S.; Jeong, D.; Lee, C.; Kim, H.; Kim, S.; Lee, H.G.; Kim, J. Fourier-spectral method for the phase-field equations. Mathematics 2020, 8, 1385. [Google Scholar] [CrossRef]
- Hu, Z.; Wise, S.M.; Wang, C.; Lowengrub, J.S. Stable and efficient finite-difference nonlinear-multigrid schemes for the phase field crystal equation. J. Comput. Phys. 2009, 228, 5323–5339. [Google Scholar] [CrossRef] [Green Version]
- Baskaran, A.; Hu, Z.; Lowengrub, J.S.; Wang, C.; Wise, S.M.; Zhou, P. Energy stable and efficient finite-difference nonlinear multigrid schemes for the modified phase field crystal equation. J. Comput. Phys. 2013, 250, 270–292. [Google Scholar] [CrossRef] [Green Version]
- Shin, J.; Lee, H.G.; Lee, J.-Y. Long-time simulation of the phase-field crystal equation using high-order energy-stable CSRK methods. Comput. Methods Appl. Mech. Eng. 2020, 364, 112981. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.G. An Efficient and Accurate Method for the Conservative Swift–Hohenberg Equation and Its Numerical Implementation. Mathematics 2020, 8, 1502. https://doi.org/10.3390/math8091502
Lee HG. An Efficient and Accurate Method for the Conservative Swift–Hohenberg Equation and Its Numerical Implementation. Mathematics. 2020; 8(9):1502. https://doi.org/10.3390/math8091502
Chicago/Turabian StyleLee, Hyun Geun. 2020. "An Efficient and Accurate Method for the Conservative Swift–Hohenberg Equation and Its Numerical Implementation" Mathematics 8, no. 9: 1502. https://doi.org/10.3390/math8091502
APA StyleLee, H. G. (2020). An Efficient and Accurate Method for the Conservative Swift–Hohenberg Equation and Its Numerical Implementation. Mathematics, 8(9), 1502. https://doi.org/10.3390/math8091502