1. Introduction
Fractional partial differential equations (FPDEs) have received extensive attentions by more and more scholars, and have been widely applied in many fields of science and engineering [
1,
2]. Many practical problems can be portrayed very well by the some FPDEs, such as fractional (reaction) diffusion equations [
3,
4,
5,
6,
7,
8,
9,
10,
11,
12], fractional Allen–Cahn equations [
13,
14,
15], fractional Cable equations [
16,
17,
18], and fractional mobile/immobile transport equations [
19,
20,
21]. In the past few decades, a large number of numerical methods [
22,
23,
24] have been proposed and used to solve the FPDEs, which have achieved excellent theoretical and numerical results. Recently, some scholars began to propose some numerical methods to solve fractional Sobolev equations. Liu et al. [
25] constructed a modified reduced-order finite element scheme to solve the time fractional Sobolev equations by using the proper orthogonal decomposition technique [
26,
27], and obtained the stability and convergence results. Haq and Hussain [
28] proposed a meshfree spectral method for the time fractional Sobolev equations by using radial basis functions and point interpolation method. Beshtokov [
29] proposed a finite difference method to solve the time fractional Sobolev-type equations with memory effect.
In this paper, we study a Crank–Nicolson finite volume element method to solve the following time fractional Sobolev equations with the initial and boundary conditions
where
with a positive constant
T. Here, we assume that
is a bounded convex polygonal region with boundary
, the coefficients
and
are two positive constants. Moreover, we assume that the initial data
and source function
are smooth enough. In (
1),
is the Caputo time fractional derivative with order
defined by
In recent years, the finite volume element (FVE) methods [
30,
31,
32,
33,
34] have been applied by more and more scholars to solve some FPDEs numerically. Sayevand and Arjang [
35] proposed an FVE method for the sub-diffusion equation with the Caputo fractional derivative. Karaa et al. [
36] adopted a piecewise linear discontinuous Galerkin method in time, and constructed an FVE scheme for the sub-diffusion equation with the Riemann-Liouville fractional derivative. Karaa and Pani [
37] constructed two fully discrete FVE schemes to solve the time fractional sub-diffusion equation with smooth and nonsmooth initial datas, in which the Riemann–Liouville fractional derivative was approximated by using convolution quadrature generated by two different difference schemes. Badr et al. [
38] proposed a B-spline FVE method for the time fractional advection-diffusion problem with the Caputo fractional derivative, and gave the stability analysis. Zhao et al. [
39] designed an fully discrete FVE scheme to solve the nonlinear time fractional mobile/immobile transport equations based on the weighted and shifted Grünwald difference (WSGD) formula, and obtained the unconditional stability and optimal error estimates.
In this paper, the main aim was to establish a fully discrete FVE scheme to solve the time fractional Sobolev equation by using the Crank–Nicolson scheme. In spatial discretization, we use the classical FVE method, which can maintain the local conservation of some physical quantities, and this is very important in numerical computing. In temporal discretization, we apply the Crank–Nicolson scheme to discretize the equation at the time node
on the whole, and combine the
-formula [
40,
41] to discretize the Caputo time fractional derivative
, so that the time convergence accuracy is
. In our theoretical analysis, we specially adopt the recursive analysis method, and obtain the unconditional stability result and the optimal a priori error estimate in the
-norm. Moreover, we provide some numerical results to verify the theoretical result, and to examine the feasibility and effectiveness of the fully discrete FVE scheme.
The remainder part of this paper is organized as follows. In
Section 2, a Crank–Nicolson FVE scheme for the time fractional Sobolev Equation (
1) is proposed. In
Section 3, the unconditional stability analysis for the Crank–Nicolson FVE scheme is derived in detail. The a prioir error estimate is given in
Section 4. Finally, in
Section 5, some numerical results are given to illustrate the feasibility and effectiveness. Furthermore, throughout the article, we adopt the mark
C to denote a generic positive constant, which is independent of the mesh parameters.
2. Crank–Nicolson Finite Volume Element Method
We first discretize the time (fractional) derivative. Let
be an equidistant grid for the time interval
and
,
, where the time step
and
N is a positive integer. For a given function
, we denote
,
, and apply
to approximate
at
, that is
where
is the truncation error.
For approximating the Caputo time fractional derivative
at
, following References [
40,
41], we introduce the
-formula as follows
where
,
is the truncation error. We denote
and
When
in (
6), we denote
and
. Then, we approximate the fractional derivative
at
by using
as follows
where
is the truncation error.
Now, we apply (
3) and (
7) to rewrite the original equation in (
1) at
as the following equivalent equation
where the truncation error
is as follows:
Following References [
23,
41], and making use of Taylor’s expansion, we can obtain the estimate of the truncation error
, that is, if
and
, then there exist a positive constant
C independent of
h and
such that
.
Making use of (
8), we can obtain the variational formulation at
as follows
where
.
Now, as shown in
Figure 1, let
be a quasi-uniform triangular partition of the domain
with
, where
is the diameter of the triangular element
. Then
and
denotes all vertices, that is
denotes the set of interior vertices in .
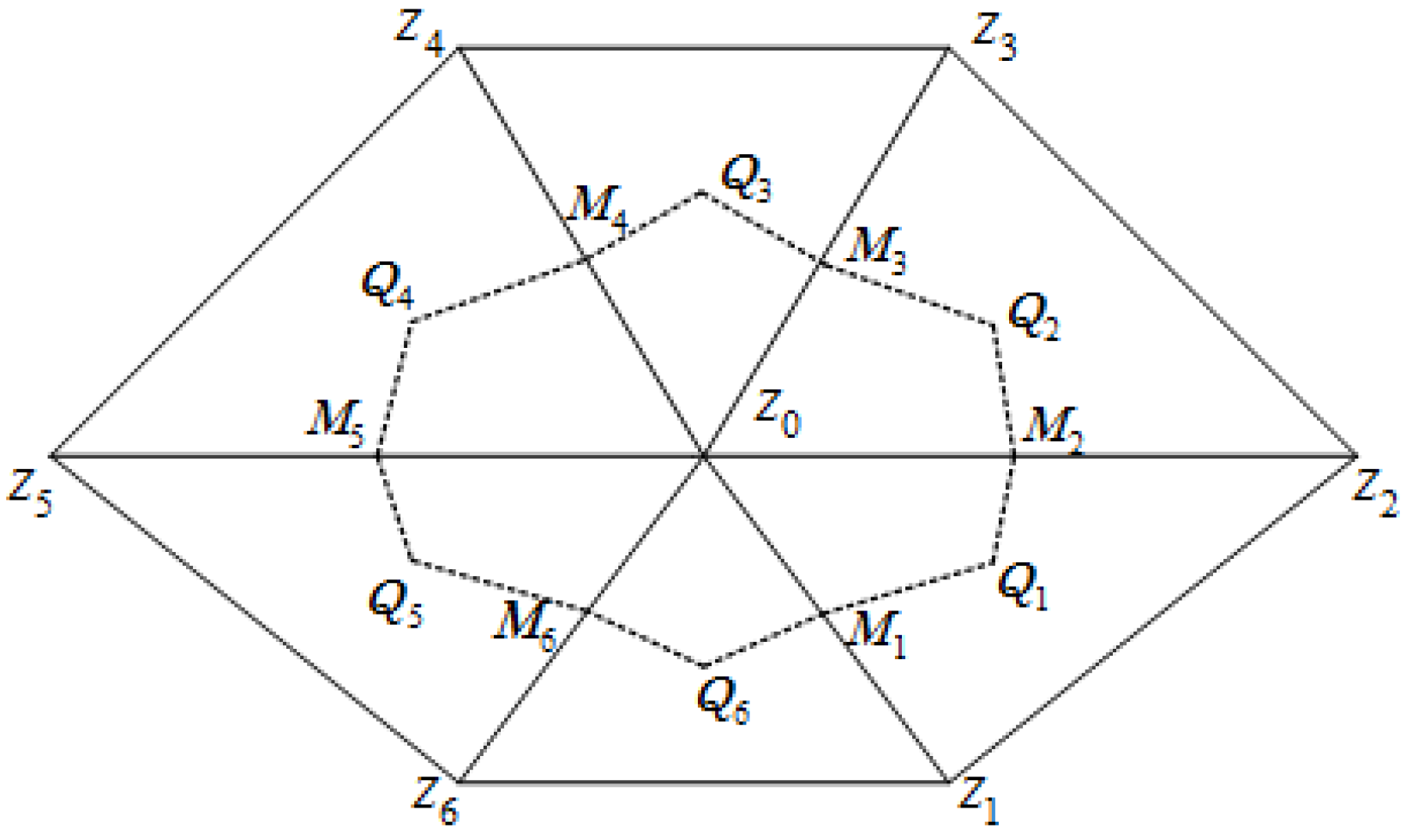
Next, based on the primal partition
, we construct a dual partition
. With
as an interior node, let
be its adjacent nodes (as shown in
Figure 1,
). Let
denote the midpoints of
and let
be the barycenters of the triangle
with
. We construct the control volume
by joining successively
. With
as the nodes of control volume
, let
be the set of all dual nodes. Then, we construct the dual partition
through the union of all control volumes
.
Then, we define the trial function space
and test function space
as follows:
With a node
z, let
be the standard nodal linear basis function, and
be the characteristic function of the control volume
. It is obvious that
and
, We define the piecewise linear interpolation operator
and the piecewise constant interpolation operator
as follows:
From Reference [
30], we can see that
and
have the following approximation property
Now, integrating (
8) over each control volume
, and applying the Green formula, we can get
where
means the outer-normal direction on
. Let
be the discrete solution of
u, make use of the operator
to rewrite (
13) as the following variational formulation:
where the bilinear form
, following References [
30,
31], can be rewritten as follows:
Let
be the discrete solution of
u at
. We establish a fully discrete Crank–Nicolson FVE scheme to seek
such that
And we can rewrite the Crank–Nicolson FVE scheme (
16) as the following equivalent formulation:
Remark 1. In the construction of the dual partition , we can also choose as the circumcenter of the triangular element, as shown in Figure 3.2.2 in Reference [30]. Based on this circumcenter dual partition, we can also construct the Crank–Nicolson FVE scheme, and obtain the same theoretical analysis. Remark 2. When the barycenter dual partition is selected, there is no essential difference between the structured and unstructured primal partition in the proposed Crank–Nicolson FVE scheme. However, when the circumcenter dual partition is selected and the space domain Ω is rectangular, based on the structured primal partition, the proposed scheme will become more simple, and is similar to the finite difference scheme.
Remark 3. Making use of Lemmas 1 and 2 in Section 3, we can easily have that the coefficient matrices of linear equations generated by (17) and (18) are invertible. Then, there exists a unique discrete solution for the Crank–Nicolson FVE scheme (16). 5. Numerical Examples
In this section, we will give some numerical results to examine the feasibility and effectiveness of the proposed Crank–Nicolson FVE scheme.
Example 1. We consider the following time fractional Sobolev equation:where , and . We choose the source function as follows:Thus, we can obtain the corresponding exact solution In the actual numerical calculation, in order to reduce the influence of numerical integration on the calculation accuracy as much as possible, we use the composite fifth-order Gauss quadrature formula in triangular domain to calculate some definite integral of space variable, including the calculation of the error
. In
Table 1, for the fixed space step
, we choose different fractional parameters
and time step
, and get the corresponding error results. From these results, it is easy to see that the time convergence rates in
-norm are close to
on the whole, which is a little higher when
and a little lower when
. In
Table 2, we select the same fractional parameters
and different meshes with
and time step
, and get the space convergence rates, which are close to 2. These numerical results are consistent with the theoretical analysis.
Furthermore, we give the error results at different time points
. In
Table 3 and
Table 4, we take the fractional parameter
, respectively, fix the time step
, and list the error results in
-norm at each time point with different space step
. From these error results, it is easy to see that the errors in
-norm are gradually increasing as time goes on. For the fractional parameter
, we also calculate corresponding error results, which are similar to the numerical behaviors in the cases
, so we will not repeat them.
Example 2. We consider the time domain , space domain , initial function , coefficients and as in Example 1. In this example, we choose the source function as follows:Then, the exact solution in this example is as follows: In this example, we also choose some different fractional parameters
and mesh sizes to carry out numerical experiments, and obtain the corresponding error results in
Table 5,
Table 6,
Table 7 and
Table 8. In
Table 5, we fix the space step
, take different time steps and fractional parameters as in Example 1, obtain the corresponding error results, and the time convergence rates in
-norm are close to
on the whole, which is a little higher when
and a little lower when
. In
Table 6, we take the mesh sizes and fractional parameters as in Example 1, and find that the space convergence rates in
-norm are also close to 2, which is consistent with the theoretical analysis. In
Table 7 and
Table 8, we give the error results at different points
with fractional parameters
, which have the same error behaviors as Example 1. Based on the above error results and analysis, we can easily see that the constructed Crank–Nicolson FVE scheme for the time fractional Sobolev equations is feasible and effective.
Remark 4. Based on the -formula, we can also construct a backward Euler FVE scheme, which is to find such thatNext, we compare the numerical results of the Crank–Nicolson FVE scheme (16) and backward Euler FVE scheme (63), and also consider Examples 1 and 2. In Table 9, we select the same mesh sizes as in Table 1 of Example 1, and obtain the error results, in which the time convergence rates of the backward Euler FVE scheme are significantly lower than when . As can be seen from Table 5 and Table 10, there are similar error behaviors in the calculation of the two schemes in Example 2. It can be seen from the comparison results that the Crank–Nicolson FVE scheme is better than the backward FVE scheme. 


{kind=link}