Abstract
In this paper, we present a new modified inertial forward–backward algorithm for finding a common solution of the quasi-variational inclusion problem and the variational inequality problem in a q-uniformly smooth Banach space. The proposed algorithm is based on descent, splitting and inertial ideas. Under suitable assumptions, we prove that the sequence generated by the iterative algorithm converges strongly to the unique solution of the abovementioned problems. Numerical examples are also given to demonstrate our results.
1. Introduction
Many authors are now studying algorithms for reckoning a zero point for monotone operators in a Hilbert space. This is the problem of finding a point such that
where T is a monotone operator. The set of zero points of T is denoted by . Diverse problems such as convex minimization, monotone variational inequalities over convex sets, equilibrium problems etc. can be stated in the form of (1).
The proximal point algorithm proposed by Martinet [1,2] and generalized by Rockafellar [3,4],
is the classical method for solving (1). Here, is the resolvent operator of maximal monotone operator T, I is the identity mapping and is a regularization sequence. Meanwhile, Rockafellar [3] and Bruck and Reich [5] proved that the sequence generated by the proximal point algorithm (2) converges weakly to a point x satisfying .
Note that it is difficult to evaluate the resolvent operator, in general. One way is to decompose the given operator into the sum of two (or more) maximal monotone operators whose resolvents are easier to evaluate than the resolvents of the original ones. More precisely, define such that the resolvent (implicit, backward step) and the evaluation of B (explicit, forward step) are much easier to compute than the full resolvent . Then, we have to consider the following monotone inclusion problem: find such that
In order to solve the problem (3), the forward–backward splitting method [6,7,8,9,10,11] is usually employed. This is defined in the following manner: and
The forward–backward method has the advantage of being easier to compute than the backward–backward method, which ensures enhanced applicability to real-life problems. Iterations have lower computational cost and can be computed exactly. Of course, the problem decomposition is not the only consideration; the convergence rate is another (see [12]).
In 2001, Alvarez and Attouch [13] employed the heavy ball method studied in [14,15] for maximal monotone operators on the proximal point algorithm. This algorithm, called the inertial proximal point algorithm, has the following form:
They proved that if is non-decreasing and with then algorithm (5) converges weakly to a zero of B.
Recently, Lorenz and Pock [16] also proposed the following inertial forward–backward algorithm for monotone operators:
where is a positive real sequence. They proved that the algorithm involving the inertial term mentioned above has weak convergence.
However, strong convergence (norm convergence) is often much more desirable than weak convergence (see [17] and references therein). Very recently, in the spirit of the splitting forward–backward method and the hybrid steepest descent method, Liu et al. [12] proposed the following iterative scheme as a new strategy in a Hilbert space; please see Algorithm 1.
Suppose is strongly monotone and continuous operator, is a maximally monotone operator and is a cocoercive operator. Then, they have proved—under certain appropriate assumptions on the sequences , and —that the sequence defined by Algorithm 1 converges strongly to the unique element of some variational inequality.
The quasi-variational inclusion problem in the setting of Hilbert spaces has been extensively studied in the literature [18,19,20,21]. However, there is little work in the existing literature on this problem in the setting of Banach spaces. The main difficulties are due to the fact that the inner product structure of a Hilbert space fails to be true in a Banach space. This is the motivation of the present study.
Motivated and inspired by Alvarez and Attouch [13], Lorenz and Pock [16], Liu et al. [12] and Thong and Cholamjiak [19], we put forward the following questions:
- (1)
- Can the corresponding results in [12,13,16,19] in Hilbert spaces be extended to the framework of Banach spaces (e.g., for )?
- (2)
- Can we extend corresponding results in [12] from one strongly monotone operator to a finite family of strongly accretive operators?
- (3)
- Can we extend the corresponding results in [12] from one cocoercive operator to a finite family of inverse strongly accretive operators?
- (4)
- Can the restrictions imposed on the parameters in [12] be relaxed?
| Algorithm 1: The hybrid forward–backward algorithm. |
 |
The purpose of this work is to give affirmative answers to the questions mentioned above. We introduce a new modified inertial forward–backward algorithm for finding a common solution of the quasi-variational inclusion problem and the variational inequality problem in q-uniformly smooth Banach spaces. Then a numerical analysis is conducted.
2. Preliminaries
To make the article self-contained, some mathematical preliminaries are necessary. In this respect, let us denote by E and a real Banach space and the dual space of E respectively. We use to denote the set of fixed points of T and to denote the closed ball with center zero and radius r. Let C be a subset of E and be a real number. The (generalized) duality mapping is given by
for all . Here denotes the generalized duality pairing between E and . If , the corresponding duality mapping is called the normalized duality mapping and is denoted by J. It is well known that if E is smooth, then and J is single-valued, which is denoted by and j, respectively. Clearly, the relation holds.
Let C be a nonempty closed convex subset of a real Banach space E. Let be a single-valued nonlinear mapping and let be a multivalued mapping. The so-called quasi-variational inclusion problem consists of finding a such that
The variational inequality problem for consists of finding a point such that
. The set of solutions of the variational inequality problem is denoted by . If is a real Hilbert space, the variational inequality problem reduces to finding a point such that
We also have that, for , if and only if .
Definition 1.
Let E be a Banach space. Then, a function is called the modulus of convexity of E if
If , for all , then E is uniformly convex.
Definition 2.
The function is said to be the modulus of smoothness of E if
A Banach space E is called:
- (1)
- Uniformly smooth if as ;
- (2)
- q-Uniformly smooth if there exists a fixed constant such that , where .
It is known that a uniformly convex Banach space is reflexive and strictly convex.
Definition 3.
A mapping is said to be:
- (1)
- Nonexpansive if
- (2)
- r-Contractive if there exists such that
- (3)
- η-Strongly accretive if for all there exists and such that
- (4)
- μ-Inverse-strongly accretive if for all there exists and such that
Definition 4.
A set-valued mapping is said to be:
- (1)
- Accretive if for any there exists such that for all and
- (2)
- m-Accretive if T is accretive and for every (equivalently, for some) where I is the identity mapping.
Let be m-accretive. The mapping defined by
is called the resolvent operator associated with where is any positive number and I is the identity mapping. It is well known that is single-valued and nonexpansive.
Recall that if C and D are nonempty subsets of a Banach space E such that C is closed convex and then a mapping is sunny provided
for all and whenever . A mapping is called a retraction if for all . Furthermore, Q is a sunny nonexpansive retraction from C onto D if Q is a retraction from C onto D which is also sunny and nonexpansive. A subset D of C is called a sunny nonexpansive retraction of C if there exists a sunny nonexpansive retraction from C onto D.
The following lemmas collect some properties of sunny nonexpansive retractions.
Lemma 1.
([22,23]) Let C be a closed convex subset of a smooth Banach space E. Let D be a nonempty subset of C. Let be a retraction and let be the normalized duality mapping and generalized duality mapping on E, respectively. Then, the following are equivalent:
- (i)
- Q is sunny and nonexpansive;
- (ii)
- ;
- (iii)
- ;
- (iv)
- .
Lemma 2.
([24]) Let E be a Banach space and be a generalized duality mapping. Then, for any given , the following inequality holds:
Lemma 3.
([25,26]) Let C be a nonempty closed convex subset of a real q-uniformly smooth Banach space E. Let the mapping be a ι-Lipschitz and κ-strongly accretive operator with constants . Let and , where is the q-uniform smoothness coefficient of E (see [24]). Then, for , the mapping defined by is a contraction with a constant .
Lemma 4.
([26]) Assume that E is a real uniformly convex and q-uniformly smooth Banach space. Suppose that is an a-inverse-strongly accretive operator for some and is an m-accretive operator. Moreover, denote by
and by
Then, it holds for all that .
Lemma 5.
([9]) Assume that C is a nonempty closed subset of a real uniformly convex and q-uniformly smooth Banach space E. Suppose that is α-inverse-strongly accretive and A is m-accretive in E, with . Then, it holds that:
- (1)
- Given and
- (2)
- Given there exists a continuous, strictly increasing and convex function with such that for all
To develop the results in this article, some technical results are necessary, as stated in the three lemmas below.
Lemma 6.
([27]) Let be a sequence of nonnegative numbers satisfying the property:
where satisfy the restrictions:
- (i)
- ;
- (ii)
- ;
- (iii)
- .
Then, .
Lemma 7.
([28]) Let . Then, the following inequality holds for arbitrary positive real numbers :
Lemma 8.
([29]) Let be a sequence of real numbers such that there exists a subsequence of such that for all . Then there exists a nondecreasing sequence such that and the following properties are satisfied for all (sufficiently large) numbers :
In fact, .
We make complete these preliminaries with two results on classes of accretive operators.
Lemma 9.
([30])
Let C be a nonempty closed convex subset of a real smooth Banach space E. Let be some positive integer, A be m-accretive in E with , be -inverse-strongly accretive with and . Let be a real number sequence in with . Then is β-inverse-strongly accretive, and
Lemma 10.
Let C be a nonempty closed convex subset of a real smooth Banach space E. Let be some positive integer, be -strongly accretive with . Let be a real number sequence in with . Then, the mapping is κ-strongly accretive.
Proof.
Let . It follows that
Consequently, the mapping is -strongly accretive. □
Now, we are ready to state and prove our results.
3. Main Results
In this section we present an algorithm for solving quasi-variational inclusion problems and variational inequality problems in Banach spaces. We assume that:
- (A1)
- E is a uniformly convex and q-uniformly smooth Banach space, and A is m-accretive;
- (A2)
- is -inverse-strongly accretive with constants for each , and ;
- (A3)
- is -Lipschitzian and -strongly accretive with constants for each , and ;
- (A4)
- and .
The proposed algorithm is of the form:
Theorem 1.
Assume that , , , and are real number sequences in [0, 1] satisfying:
- (i)
- ;
- (ii)
- ;
- (iii)
- ;
- (iv)
- , .
Then generated by Algorithm 2 converges strongly to a point , which is also the unique solution of the variational inequalty problem
Remark 1.
We note that condition (iii) can be easily implemented since the value of is known before choosing . Indeed, the parameter can be chosen such that
where and is a positive sequence such that .
We now prove Theorem 1.
Proof.
We first prove that the sequence is bounded. Writing , one can then deduce from Lemma 9 that B is β-inverse-strongly accretive. Additionally, letting , we infer from Lemma 10 and Assumption (A3) that is ι-Lipschitzian and κ-strongly accretive. Taking any , we infer from Algorithm 2, Lemma 5 (2) and (i) that
which implies
and
From the definition of , we deduce
Invoking (iii), there exists a positive constant such that
| Algorithm 2: The modified hybrid forward–backward algorithm. |
 |
From (13) and (14), Lemma 3, Assumption (A4) and (ii), one obtains
where . This implies that sequence is bounded. At the same time, by putting together (13) and (14), one concludes that and are bounded. According to Lemma 2, we obtain
where . By combining (11) with (16), one immediately concludes that
Next, we show that converges by considering two possible cases.
Case 1. Suppose that there exists such that the sequence is monotonically decreasing; thus, exists. Using (i), (ii), (iii) and letting n tend to infinity in (19), one finds that
It follows from (ii), (iii), (20) and the properties of (see Lemma 5 (2)) that
We deduce from Lemma 4 and (22) that
Notice that
It follows from (ii), (iii) and the definitions of and that
and
Denote . Then, it immediately holds that
In view of Lemma 5 (1) and (28), there exists such that for all and
Setting and taking a real number , we find by Lemma 3 that is contractive with a constant . Let satisfy . By Lemma 1, Lemma 9 and Xu’s theorem (4.1) [31], we obtain that converges strongly to a point , which is also the unique solution of variational inequality problem
Apply Lemma 4 to obtain that is the unique solution of variational inequality problem (10).
Next we show that
which is equivalent to
Using Lemma 2, we deduce that
where . This implies
It follows that
where is a constant such that for all and . Taking the lim sup as in (31) and noting the fact that the two limits are interchangeable because the duality map J is norm-to-norm uniformly continuous on bounded sets, we obtain (30).
It follows from Lemma 2, Lemma 3 and (13) that
Noticing Lemma 7, we infer
So doing, Lemma 6 asserts that . Coming back to (25)–(27), one concludes that , and converge strongly to .
Case 2. Assume that is not monotonically decreasing. Then, there exists a subsequence of such that
From Lemma 8, there exists a nondecreasing sequence such that
Repeating the argument for (24), we deduce
A calculation similar to the proof in Case 1 guarantees that
Because the duality map is norm-to-norm uniformly continuous on bounded sets, we obtain that from (11), Lemmas 2 and 3,
From (11), Lemmas 2 and 3, one obtains
From (35) and Lemma 7, we derive
Hence,
It thus follows from (36) that
From the above, one can conclude that the sequences generated by Algorithm 2 converge strongly to a point , which is also the unique solution of the variational inequality problem (1). This completes the proof. □
Remark 2.
Theorem 1 extends, improves and develops corresponding results in [12,13,16,19] in the following respects:
- The results in this paper improve and extend corresponding results in [12,13,16,19] in Hilbert spaces to more general q-uniformly smooth Banach spaces.
- The results in this paper extend corresponding results in [12] from one strongly monotone operator to a finite family of strongly accretive operators.
- The results in this paper extend corresponding results in [12] from one cocoercive operator to a finite family of inverse-strongly accretive operators.
- We omit the condition , which is very necessary in Theorem 1 of Liu et al. [12].
- The proof of our Theorem 1 is very different from the proof of Theorem 1 of Liu et al. [12].
The following result can be obtained from Theorem 1 immediately.
Corollary 1.
Let in Theorem 1. Then, generated by Algorithm 2 converges strongly to a point , which is also the unique solution of the variational inequality problem
4. Application to Constrained Convex Minimization Problems
In this section, we shall apply our main results to an approximate constrained convex minimization problem. Let E be the real Euclidean n-space and be a nonempty closed convex subset of H. We consider the following constrained convex minimization problem:
where is a real-valued convex function and assumes that the problem (42) is consistent (i.e., its solution set is nonempty). Let D denote its solution set. For the minimization problem (42), if is differentiable, then we have the following lemma.
Lemma 11.
([32]) (Optimality condition) A necessary condition of optimality for a point to be a solution of the minimization problem (42) is that z solves the variational inequality
Equivalently, solves the fixed point equation
for every constant . If, in addition, φ is convex, then the optimality condition (43) is also sufficient.
Theorem 2.
Let E be the real Euclidean n-space . Assume that φ is differentiable and the gradient is ι-Lipschitzian and κ-strongly monotone with constants . Let A be m-accretive and be -inverse-strongly accretive with constants for each , and . Assume and . Let be a sequence generated by
| Algorithm 3: The modified hybrid forward–backward algorithm. |
 |
Assume that , , and are real number sequences in [0, 1] satisfying:
- (i)
- ;
- (ii)
- ;
- (iii)
- ;
- (iv)
- .
Then, generated by Algorithm 2 converges strongly to a point , which is also the unique solution of the minimization problem (42).
5. Numerical Examples
The purpose of this section is to give a numerical example supporting Theorem 1.
Example 3.
Let with the inner product defined by for all and the standard norm . Let be defined as for all . Let be defined as for each . Let be defined as for each . It is easy to check that and A is maximal monotone. Additionally, it is easy to check that is -inverse-strongly accretive for each and is 1-Lipschitzian and 1-strongly monotone for each . Let us choose , , , and for each . Then , , , and δ satisfy all the conditions of Theorem 1. Therefore Algorithm 2 becomes
In this example, we compare the efficiency of Algorithm 2 with Algorithm 1 and the efficiency of Algorithm 2 with (6). It is easily seen that Algorithm 2 is more general while Algorithm 1 and (6) are its special cases. As a matter of fact, if and for all , then Algorithm 2 is reduced to Algorithm 1. Furthermore, if , then Algorithm 2 collapses to (6).
In Algorithm 1, let , , , , and A be same as those in Example 3. Let be defined by and , respectively. As shown in Table 1 and Figure 1, it is trivial to see that Algorithm 2 clearly converges much more quickly than Algorithm 1.

Table 1.
Comparison results 1.
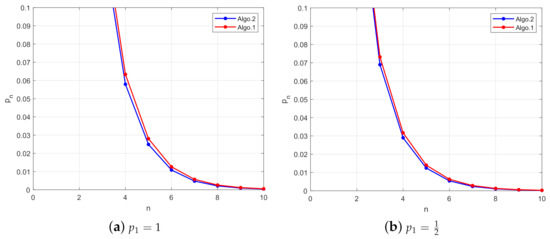
Figure 1.
Comparison results 2.
In addition, if we set , then Algorithm 1 is reduced to (6). As shown in Table 2 and Figure 2, Algorithm 2 still converges more quickly than (6).
Table 2.
Comparison results 2.
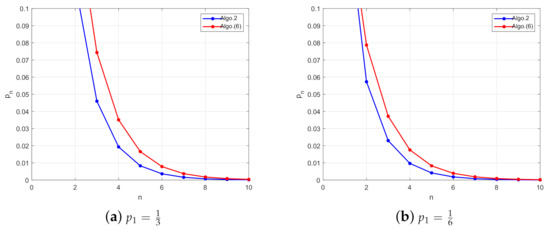
Figure 2.
Comparison results 2.
6. Conclusions
In this paper, we study a new modified inertial forward–backward algorithm for finding a common solution of the quasi-variational inclusion problem and the variational inequality problem in a q-uniformly smooth Banach space. Under suitable assumptions, we established a strong convergence theorem for approximating the unique solution of the abovementioned problems. Some applications and numerical experiments of the established results are given to further illustrate the applicability of our results. In our future work, we plan to extend our results to more general Banach spaces.
Author Contributions
Conceptualization, Y.S. and M.P.; funding acquisition and supervision, M.P.; writing—original draft preparation, Y.S.; writing—review and editing and software, Y.S. and M.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Key Scientific Research Project for Colleges and Universities in Henan Province (grant number 20A110038).
Data Availability Statement
All data in this research are available at request.
Acknowledgments
The authors would like to thank the reviewers and the editor for their valuable comments, which have helped us to significanly improve the original manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Martinet, B. Regularisation d’inéquations variationelles par approximations successives. Rev. Fr. Informat. Rech. Oper. 1970, 4, 154–158. [Google Scholar]
- Martinet, B. Détermination approchée d’un point fixe d’une application pseudo-contractante. Cas L’Application Prox’ C.R. Acad. Sci Paris Sér. A Math. 1972, 274, 163–165. [Google Scholar]
- Rockafellar, R.T. Monotone operators and the proximal point algorithm. SIAM J. Control Optim. 1976, 14, 877–898. [Google Scholar] [CrossRef]
- Rockafellar, R.T. Augmented Lagrangians and applications of the proximal point algorithm in convex programming. Math. Oper. Res. 1976, 1, 97–116. [Google Scholar] [CrossRef]
- Bruck, R.E.; Reich, S. Nonexpansive projections and resolvents of accretive operators in Banach spaces. Houst. J. Math. 1977, 3, 459–470. [Google Scholar]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: New York, NY, USA, 2011. [Google Scholar]
- Cholamjiak, P. A generalized forward-backward splitting method for solving quasi inclusion problems in Banach spaces. Numer. Algor. 1994, 8, 221–239. [Google Scholar] [CrossRef]
- Combettes, P.L.; Wajs, V.R. Signal recovery by proximal forward-backward splitting. Multiscale Model. Simul. 2005, 4, 1168–1200. [Google Scholar] [CrossRef]
- López, G.; Martín-Márquez, V.; Wang, F.H.; Xu, H.K. Forward-Backward splitting methods for accretive operators in Banach spaces. Abstr. Appl. Anal. 2012, 2012, 109236. [Google Scholar] [CrossRef]
- Dadashi, V.; Postolache, M. Forward-backward splitting algorithm for fixed point problems and zeros of the sum of monotone operators. Arab. J. Math. 2020, 9, 89–99. [Google Scholar] [CrossRef]
- Tseng, P. A modified forward-backward splitting method for maximal monotone mappings. SIAM J. Control Optim. 2000, 38, 431–446. [Google Scholar] [CrossRef]
- Liu, L.; Qin, X.; Yao, J.C. A hybrid forward-backward algorithm and its optimization application. Mathematics 2020, 8, 447. [Google Scholar] [CrossRef]
- Alvarez, F.; Attouch, H. An inertial proximal method for monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Polyak, B.T. Introduction to Optimization; Optimization Software: New York, NY, USA, 1987. [Google Scholar]
- Polyak, B.T. Some methods of speeding up the convergence of iterarive metheods. Zh. Vychisl. Mat. Mat. Fiz. 1964, 4, 1–17. [Google Scholar]
- Lorenz, D.A.; Pock, T. An inertial forward-backward algorithm for monotone inclusions. J. Math. Imaging Vis. 2015, 51, 311–325. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. A weak-to-strong convergence principle for Fejér-monotone methods in Hilbert spaces. Math. Oper. Res. 2001, 26, 248–264. [Google Scholar] [CrossRef]
- Yao, Y.; Cho, Y.J.; Liou, Y.C. Algorithms of common solutions for variational inclusions, mixed equilibrium problems and fixed point problems. Eur. J. Oper. Res. 2011, 212, 242–250. [Google Scholar] [CrossRef]
- Thong, D.V.; Cholamjiak, P. Strong convergence of a forward-backward splitting method with a new step size for solving monotone inclusions. Comput. Appl. Math. 2019, 38, 1–16. [Google Scholar] [CrossRef]
- Yao, Z.; Wu, Y.K.; Wen, C.F. Strong convergence analysis of iterative algorithms for solving variational inclusions and fixed-point problems of pseudocontractive operators. J. Math. 2021, 2021, 1–7. [Google Scholar] [CrossRef]
- Tan, B.; Qin, X.; Yao, J.C. Strong convergence of self-adaptive inertial algorithms for solving split variational inclusion problems with applications. J. Sci. Comput. 2021, 87, 1–34. [Google Scholar] [CrossRef]
- Reich, S. Asymptotic behavior of contractions in Banach spaces. J. Math. Anal. Appl. 1973, 44, 57–70. [Google Scholar] [CrossRef]
- Song, Y.L.; Ceng, L.C. A general iteration scheme for variational inequality problem and common fixed point problems of nonexpansive mappings in q-uniformly smooth Banach spaces. J. Glob. Optim. 2013, 57, 1327–1348. [Google Scholar] [CrossRef]
- Xu, H.K. Inequalities in Banach spaces with applications. Nonlinear Anal. 1991, 16, 1127–1138. [Google Scholar] [CrossRef]
- Pongsakorn, S.; Poom, K. Iterative methods for variational inequality problems and fixed point problems of a countable family of strict pseudo-contractions in a q-uniformly smooth Banach space. Fixed Point Theory Appl. 2012, 2012. [Google Scholar] [CrossRef]
- Song, Y.L.; Ceng, L.C. Convergence theorems for accretive operators with nonlinear mappings in Banach spaces. Abstr. Appl. Anal. 2014, 12, 1–12. [Google Scholar] [CrossRef]
- Xu, H.K. Iterative algorithm for nonlinear operators. J. Lond. Math. Soc. 2002, 2, 1–17. [Google Scholar] [CrossRef]
- Mitrinović, D.S. Analytic Inequalities; Springer: New York, NY, USA, 1970. [Google Scholar]
- Maingé, P.E. The viscosity approximation process for quasi-nonexpansive mappings in Hilbert spaces. Comput. Math. Appl. 2010, 59, 74–79. [Google Scholar] [CrossRef]
- Song, Y.L.; Ceng, L.C. Strong convergence of a general iterative algorithm for a finite family of accretive operators in Banach spaces. Fixed Point Theory Appl. 2015, 2015, 90. [Google Scholar] [CrossRef]
- Xu, H.K. Viscosity approximation methods for nonexpansive mappings. J. Math. Anal. Appl. 2004, 298, 279–291. [Google Scholar] [CrossRef]
- Meng, S.; Xu, H.K. Remarks on the gradient-projection algorithm. J. Nonlinear Anal. Optim. 2010, 1, 35–43. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).