
Long-Term Target Tracking of UAVs Based on Kernelized Correlation Filter

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
2.1. Target Tracking Methods
2.2. Target Tracking on UAVs
3. Tracker Based on KCF
3.1. KCF Tracker
3.2. KCFLabCPP Tracker
3.3. Model Update Strategy and Re-Detection Module
| Algorithm 1. Improved kcf algorithm |
| Input: Y: the newly arrived observation, Bold: the last target bounding box, Output: Bnew: the new target bounding box, |
|
4. Evaluation on Tracking Benchmark
4.1. Experimental Setup
4.2. Evaluation Method
4.3. Qualitative Evaluation
- (1)
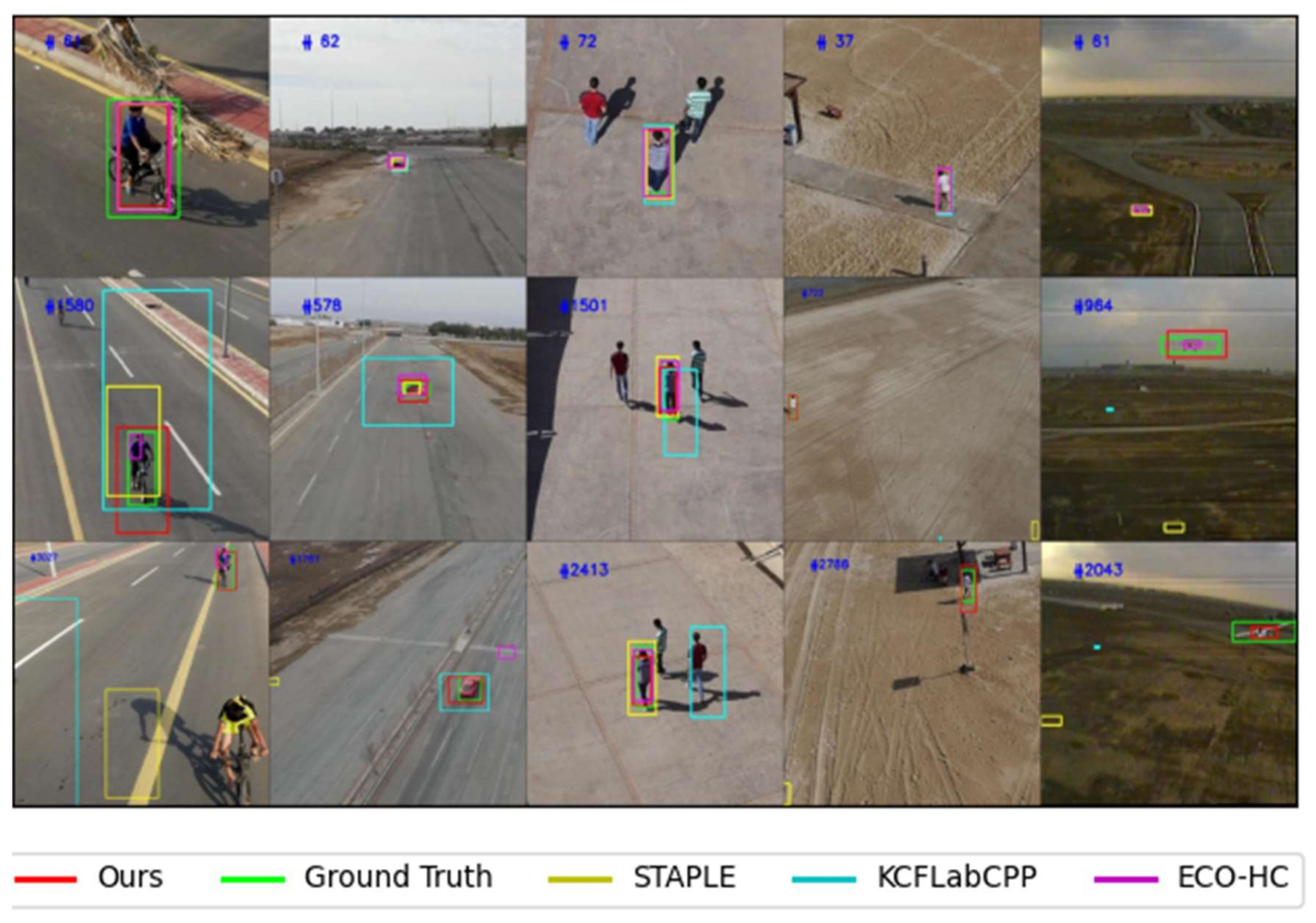
- bike1: In this sequence, the tracking target is a moving bicycle. The aspect ratio of the object and camera’s angle of view are constantly changing. Only our tracker and ECO-HC track the target correctly from beginning to end, and it can be seen from the image that the result of our tracker is closer to the ground truth. Since the tracking model of our tracker removes the tracking results with lower confidence when updating, the error accumulated by the model becomes less.
- (2)
- car16: In this sequence, the tracking target is a moving car. The target is moving fast and its distance from the camera is always changing. In the end, only our tracker and KCFLabCPP can track the target correctly.
- (3)
- group1: The tracking target of this sequence is a walking person. There are similar objects around the target, and similar objects are interlaced with the target many times during the tracking process. Our tracker can still track the target correctly.
- (4)
- person14: The tracking target in this sequence is a running person. During the tracking process, the target was completely blocked by obstacles for a period of time. When the target reappears in the field of view, only our tracker successfully re-detected the target, and other trackers lost the target. This shows that the re-detection module of our tracker has successfully worked.
- (5)
- uav1: The tracking target of this sequence is a fast-moving UAV, and the video resolution is low. This is a great challenge for trackers. Although there is no tracker to track the target successfully from beginning to end, our tracker has highest evaluation score indicating our tracker’s ability to track low-resolution targets.
4.4. Quantitative Evaluation
5. Implementation on UAV Platform
5.1. System Architecture
5.2. Target Position Estimation
5.3. Flight Control
5.4. Outdoor Experiments
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- De Smedt, F.; Hulens, D.; Goedemé, T. On-board real-time tracking of pedestrians on a UAV. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Boston, MA, USA, 7–12 June 2015; pp. 1–8. [Google Scholar]
- Scherer, J.; Yahyanejad, S.; Hayat, S.; Yanmaz, E.; Andre, T.; Khan, A.; Vukadinovic, V.; Bettstetter, C.; Hellwagner, H.; Rinner, B. An autonomous multi-UAV system for search and rescue. In Proceedings of the First Workshop on Micro Aerial Vehicle Networks Systems, and Applications for Civilian Use, Florence, Italy, 18 May 2015; pp. 33–38. [Google Scholar]
- San, K.T.; Mun, S.J.; Choe, Y.H.; Chang, Y.S. UAV delivery monitoring system. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; p. 04011. [Google Scholar]
- Huang, Z.; Fu, C.; Li, Y.; Lin, F.; Lu, P. Learning aberrance repressed correlation filters for real-time uav tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 2891–2900. [Google Scholar]
- Fu, C.; Zhang, Y.; Duan, R.; Xie, Z. Robust scalable part-based visual tracking for UAV with background-aware correlation filter. In Proceedings of the 2018 IEEE International Conference on Robotics Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2245–2252. [Google Scholar]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor aerial vehicles: Modeling, estimation, and control of quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Carli, R.; Cavone, G.; Epicoco, N.; Di Ferdinando, M.; Scarabaggio, P.; Dotoli, M. Consensus-Based Algorithms for Controlling Swarms of Unmanned Aerial Vehicles. In Proceedings of the International Conference on Ad-Hoc Networks and Wireless, Bari, Italy, 19–21 October 2020; Springer: Cham, Switzerland, 2020; pp. 84–99. [Google Scholar]
- Hao, J.; Zhou, Y.; Zhang, G.; Lv, Q.; Wu, Q. A review of target tracking algorithm based on UAV. In Proceedings of the 2018 IEEE International Conference on Cyborg and Bionic Systems (CBS), Shenzhen, China, 25–27 October 2018; pp. 328–333. [Google Scholar]
- Chen, P.; Zhou, Y. The Review of target tracking for UAV. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019; pp. 1800–1805. [Google Scholar]
- Fu, C.; Li, B.; Ding, F.; Lin, F.; Lu, G. Correlation Filters for Unmanned Aerial Vehicle-Based Aerial Tracking: A Review and Experimental Evaluation. IEEE Geosci. Remote Sens. Mag. 2021, 2–387. [Google Scholar] [CrossRef]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the circulant structure of tracking-by-detection with kernels. In Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 702–715. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEEE Trans. Pattern Anal. Mach. Intel. 2014, 37, 583–596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Danelljan, M.; Häger, G.; Khan, F.; Felsberg, M. Accurate scale estimation for robust visual tracking. In Proceedings of the British Machine Vision Conference, Nottingham, 1–5 September 2014; Bmva Press: Durham, UK, 2014. [Google Scholar]
- Li, Y.; Zhu, J. A scale adaptive kernel correlation filter tracker with feature integration. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Cham, Switzerland, 2014; pp. 254–265. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Golodetz, S.; Miksik, O.; Torr, P.H. Staple: Complementary learners for real-time tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1401–1409. [Google Scholar]
- Possegger, H.; Mauthner, T.; Bischof, H. In defense of color-based model-free tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 2113–2120. [Google Scholar]
- Danelljan, M.; Hager, G.; Shahbaz Khan, F.; Felsberg, M. Learning spatially regularized correlation filters for visual tracking. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 4310–4318. [Google Scholar]
- Danelljan, M.; Hager, G.; Shahbaz Khan, F.; Felsberg, M. Adaptive decontamination of the training set: A unified formulation for discriminative visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1430–1438. [Google Scholar]
- Danelljan, M.; Robinson, A.; Khan, F.S.; Felsberg, M. Beyond correlation filters: Learning continuous convolution operators for visual tracking. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; Springer: Cham, Switzerland, 2016; pp. 472–488. [Google Scholar]
- Dai, K.; Wang, D.; Lu, H.; Sun, C.; Li, J. Visual tracking via adaptive spatially-regularized correlation filters. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 4670–4679. [Google Scholar]
- Danelljan, M.; Bhat, G.; Shahbaz Khan, F.; Sun, C.; Li, J. Eco: Efficient convolution operators for tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6638–6646. [Google Scholar]
- Pestana, J.; Sanchez-Lopez, J.L.; Saripalli, S.; Campoy, P. Computer vision based general object following for gps-denied multirotor unmanned vehicles. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 1886–1891. [Google Scholar]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-learning-detection. IEEE Trans. Pattern Anal. Mach. Intel. 2011, 34, 1409–1422. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, C.; Yang, X.; Zhang, C.; Yang, M.H. Long-term correlation tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 5388–5396. [Google Scholar]
- Mueller, M.; Sharma, G.; Smith, N.; Ghanem, B. Persistent aerial tracking system for uavs. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016; pp. 1562–1569. [Google Scholar]
- Hare, S.; Golodetz, S.; Saffari, A.; Vineet, V.; Cheng, M.M. Struck: Structured output tracking with kernels. IEEE Trans. Pattern Anal. Mach. Intel. 2015, 38, 2096–2109. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, H.; Lin, L.; Zheng, Z.; Guan, Y.; Liu, Z. An autonomous vision-based target tracking system for rotorcraft unmanned aerial vehicles. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1732–1738. [Google Scholar]
- Ma, Y.; Pei, P.; Xiang, C.; Yao, S.; Gao, Y. KCF based 3D Object Tracking via RGB-D Camera of a Quadrotor. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 939–944. [Google Scholar]
- Li, R.; Pang, M.; Zhao, C.; Zhou, G.; Fang, L. Monocular long-term target following on uavs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 29–37. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.H. Online object tracking: A benchmark. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 2411–2418. [Google Scholar]
- Li, C.; Liu, X.; Su, X.; Zhang, B. Robust kernelized correlation filter with scale adaption for real-time single object tracking. J. Real-Time Image Process. 2018, 15, 583–596. [Google Scholar] [CrossRef]
- Hadfield, S.J.; Lebeda, K.; Bowden, R. The visual object tracking VOT2014 challenge results. In Proceedings of the European Conference on Computer Vision (ECCV) Visual Object Tracking Challenge Workshop, University of Surrey, Zurich, Switzerland, 6–7, 12 September 2014. [Google Scholar]
- Lukežič, A.; Zajc, L.Č.; Vojíř, T.; Matas, J.; Kristan, M. Now you see me: Evaluating performance in long-term visual tracking. arXiv 2018, arXiv:1804.07056. [Google Scholar]
- Briechle, K.; Hanebeck, U.D. Template matching using fast normalized cross correlation. In Proceedings of the Optical Pattern Recognition XII. Int. Soc. Opt. Photonics 2001, 4387, 95–102. [Google Scholar]
- Mueller, M.; Smith, N.; Ghanem, B. A benchmark and simulator for uav tracking. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; Springer: Cham, Switzerland, 2016; pp. 445–461. [Google Scholar]
- Nebehay, G.; Pflugfelder, R. Clustering of static-adaptive correspondences for deformable object tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 2784–2791. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Tang, W.; Ding, Z. Long-Term Target Tracking of UAVs Based on Kernelized Correlation Filter. Mathematics 2021, 9, 3006. https://doi.org/10.3390/math9233006
Yang J, Tang W, Ding Z. Long-Term Target Tracking of UAVs Based on Kernelized Correlation Filter. Mathematics. 2021; 9(23):3006. https://doi.org/10.3390/math9233006
Chicago/Turabian StyleYang, Junqiang, Wenbing Tang, and Zuohua Ding. 2021. "Long-Term Target Tracking of UAVs Based on Kernelized Correlation Filter" Mathematics 9, no. 23: 3006. https://doi.org/10.3390/math9233006
APA StyleYang, J., Tang, W., & Ding, Z. (2021). Long-Term Target Tracking of UAVs Based on Kernelized Correlation Filter. Mathematics, 9(23), 3006. https://doi.org/10.3390/math9233006