3.1.1. Cable-Stayed Bridge Finite Element Model
A numerical FEM code named “BRITRANSYS” was written in ANSYS© (V 14.0) and contains two parts: (a) A detailed model based on the characteristics of the RPB with the possibility of including different types of damage like damage on deck and cables; (b) the transient solution/responses obtained while a force moves on different nodes along any section or the whole bridge deck (simulating a vehicle passing through the bridge), different speeds and weights for the “vehicle” can be considered and the dynamic responses (displacements and accelerations) can be obtained in any node of the model.
As for the FEM model, the ANSYS APDL© code was built as follows: The model geometry of the RPB was created in AutoCAD©, then became APDL© commands through an Excel© sheet in the form of keypoints coordinates; initial/final keypoints were defined for each line. The writing of commands for areas was made by using simple APDL© commands, mainly “*DO”.
Three different types of elements were used to build the model: BEAM188 for towers, main girders and transverse girders; SHELL181 for slab; and LINK180 for cables. Then the material properties were defined for each structural element as well as the cross-sectional properties.
BEAM188 is a 3-D two-node beam element suitable for analyzing slender to moderately stubby/thick beam structures. The element is based on Timoshenko beam theory which includes shear-deformation effects and it has six or seven DOFs at each node. SHELL181 is a four-node structural element with six DOFs at each node: Translations in the three directions, and rotations about the three axes. It is suitable for analyzing thin to moderately-thick shell structures. LINK180 is a 3-D spar/truss element that is useful in a variety of engineering applications. This element is a uniaxial tension–compression element with three DOFs at each node: Translations in the three nodal directions. Tension-only (cable) and compression-only (gap) options are supported. Plasticity, creep, rotation, large deflection and large strain capabilities are included and no bending of the element is considered.
Every cable in the bridge has specific values of area, mass and stress (related with tension). Stresses data were load to the software in a vector array with 112 spaces, the spaces were filled by loading data with the “*VREAD” command, this command takes the data previously stored in a “.txt” extension file. Then, area and mass values were assigned to each line that correspond to a cable. Previously, for meshing the structural elements, their attributes like cross-sectional area, material and element type were assigned to each different structural elements group. Once this was done, the whole model was meshed to be composed of 7365 elements and 8053 nodes. Finally, the restrictions and the initial state that define the initial stress of every cable were defined. To finish a base bridge model, the command “SOLVE” was set.
Likewise, in order to obtain the displacement/acceleration dynamic responses, a specific lane where the moving load passes and the corresponding longitudinal section of the bridge deck were defined, then the respective nodes one after the other (in straight line shape) were created and consecutively numbered. After that, the moving load simulating a vehicle was defined with a specific weight and speed and set on each node through the ANSYS
© transient solution. Finally, this part of the code defines the nodes and the responses to be obtained, then the corresponding data are saved in “.txt” format to be post-processed.
Figure 7 shows the healthy FEM model which was calibrated with experimental results obtained from the RPB monitoring.
On the other hand, a MATLAB© (R2017a) code called “MAT_BRITRANSYS” was developed in order to post-process the signals from the FEM model/simulations and follow the methodology (WEAM-Wavelet Energy Accumulation Method) for damage detection. This code loads two numerical simulations from the ANSYS© code (one healthy and one damaged in “.txt” format) for different measurement positions along the considered longitudinal bridge deck section (the same measurement positions for healthy and damaged cases), and provides: time-domain plots (waveforms), frequency-base plots (FFT’s), spectrograms and CWT 3-D colored diagrams; all for original, noisy (Gaussian noise added) and filtered (Savitzky-Golay filter used) signals. Even more, this code also post-processes the CWT diagrams and performs subtractions (damaged signals-healthy signals), removes the border effects (by means of signal extensions) to bring the border effects to “inexistent” parts of the considered bridge deck, calculates the total wavelet energy for all the respective bridge deck for each point of measurement, and makes an average of the total wavelet energy considering the different positions of the measurements. Then, a damage can be detected and its location identified by means of the accumulation of this energy. For analyzing the real data from the RPB, the same code was used with some modifications according to the quantity, position and type of sensors.
3.1.2. Results from Numerical Simulations
Two of the most dangerous faults that can lead to the collapse of the RPB (as in any cable-stayed bridge) are a damage on the deck and a damaged cable. Both cases are studied in this section considering the FEM model and applying the WEAM, as it was described in
Section 2.
All the types of mother wavelets that can be selected with MATLAB© and different types of filters were implemented; the best results to identify damage were obtained with the Mexican hat mother wavelet and a Savitzky-Golay filter.
The first case studied was a damage on the deck, simulated by reducing by 30% the cross-sectional area (0.30 h, where h is the height of the deck) in 5% of the 203 m length bridge (bridge deck between pylons). The cross-section of the deck is rectangular with a height (h) = 0.20 m and a width (w) = 23.40 m. The damage was placed at 25%, 50% and 75% of the considered length of the bridge deck (one at time) and the measurement points were established at 25%, 50% and 75% of the considered length of the bridge deck (all at the same time for each case of healthy bridge and bridge with a single damage). It is important to mention that, under the deck (slab), the bridge has a very rigid structure composed by two main girders and 117 transverse girders; therefore, that reduction of 30% of the cross-sectional area impacts in a stiffness reduction of 22% on the damaged section.
As it has been notified [
8,
29], low vehicle speeds allow damage identification more accurately on long bridges. However, the selection of a vehicle with low speed crossing all the RPB would impact significantly in computing time. Thus, in the interest of reducing the computing time, a moving force representing a vehicle type T3S3 (nomenclature not related with the corresponding of cables and semi-harps) fully loaded (54,000 kgf) was selected to cross just the bridge deck between pylons; that is, L = 203 m (instead of 407.21 m) with a speed of 1 m/s and sampling frequency of 64 Hz. This configuration and selecting an adequate resolution for the CWT diagrams according to the range of scale allowed having an equilibrium between computing time and accuracy of results for damage identification. It should be noted that it does not matter if the vehicle starts its movement at the first node or later, the results for identifying damage are not affected as long as the vehicle passes at the damage location. The selected lane for the moving force was the right lane of the downstream side and the measurement points were located on the corresponding nodes of the right side of the deck (downstream side) where the moving force does not pass. It is important to notice that regardless the CWT provides pseudo frequency (scale)-time domain info, if the vehicle speed is known (as it happens in the numerical simulations) then the CWT diagrams are easier to analyze by including the length of the bridge deck (distance) instead of time, so that we can know the damage position on the bridge corresponding with the vehicle position.
In
Figure 8, the CWT diagrams for a healthy bridge deck and a damaged bridge deck at 25% of L obtained from the corresponding acceleration signals at the three locations are shown. As it can be observed in this figure, for this initial wide range of scale (from 1 to 500) there is a tiny clue of damage around 0.25 L, but it is not very evident because it is partially masked. In this range of scale, the WE is amplified mainly in the zone of the influence of the first natural frequency and secondly in the regions of the border effects (around 0% and 100% of L) and damage (around 25% of L), hindering a clear damage identification. Thus, comparing the damaged diagrams (
Figure 8b) with the corresponding ones of the healthy case (
Figure 8a) could seem very similar each other; however, the presence of damage is there but masked.
In order to increase the evidence of damage, the signals used for obtaining the diagrams shown in
Figure 8 were subtracted (damaged ones—healthy ones) and then the resultant signals were extended by using the MATLAB© command “wextend” (antisymmetric-padding) for eliminating the border effects. In
Figure 9, the subtracted and extended CWT diagram is shown just for one measurement in the interest of brevity. It can be observed that the border effects were taken out of the real bridge length considered; whereas the useful subtraction effect cannot be clearly distinguished yet because the scale range is not the convenient. Therefore, just the zone inside the yellow square must be considered, in this way the real bridge length is again analyzed (but now without border effects), whereas the scale from 250 to 500 allows to focus on the damage effect and the influence of the subtraction will be appreciated. Likewise, once the step related with the subtraction of signals was applied, the cases presented in every figure as “damaged bridge” correspond with the use of the subtracted signals.
Thus, the CWT diagrams for the three measurement positions considering the region of the yellow square are shown in
Figure 10b and the respective ones for the healthy bridge are shown in
Figure 10a. Comparing those figures, the presence of damage is clear with evident indicators of high wavelets’ coefficients (energy) around the damage location. It should be noted that damage identification is possible even if the measurements come far away from the damage position; however, the closer the measurement is to the position of the damage, the greater the energy, as it will be shown next.
The WE energy for a healthy and a damaged bridge deck was calculated for each point of the considered length by means of the area under the curve along the adjusted range of scale. The results for healthy and damaged cases are shown in
Figure 11, where it can be observed that the WE for the healthy cases is very low and flat with tiny WE accumulation at the measurement points and at the ends because of the remaining border effects. Whereas, for the damaged cases, no matter the measurement point, the WE accumulation is always around the damage location and its magnitude is much higher compared with the healthy cases. Even for the case of measurement at 0.75 L, the percentage of error for the damage localization is very acceptable (4.1%), while for the other two measurements it is smaller due to the closeness with damage (2.8% and 1.6% for measurement at 0.50 L and 0.25 L, respectively). The advantage of this method of detecting damage using just one point of measurement far away from damage is interesting.
In real cases, just one value of the total WE would be useful and; therefore, the average of the WE considering all the measurement points must be calculated. Moreover, it must be taken into account that the signals would contain significant percentages of noise, making the damage identification difficult and requiring a useful filter. Thus, in
Figure 12, the total WE for all the measurement positions and respective averages are presented for healthy and damaged cases considering the original, noisy and filtered signals. The original signals are signals generated with the FEM simulations and no noise was added and no filters were used (like the ones used for the previous diagrams exhibited); for the noisy signals, 15% of Gaussian noise was added; and for the filtered signals a Savitzky-Golay filter (order = 2; window length = 19) was implemented for the noisy signals. It can be observed in
Figure 12 that the percentage of error in damage identification for average noisy signal increased 2.6 times with respect to the original case (still acceptable considering the big percentage of noise added). Whereas, for the filtered case, the percentage of error was reduced 1.4 times with respect to the noisy case. In all the scenarios, damage detection and localization were possible and the percentage of error was less than 5.0%.
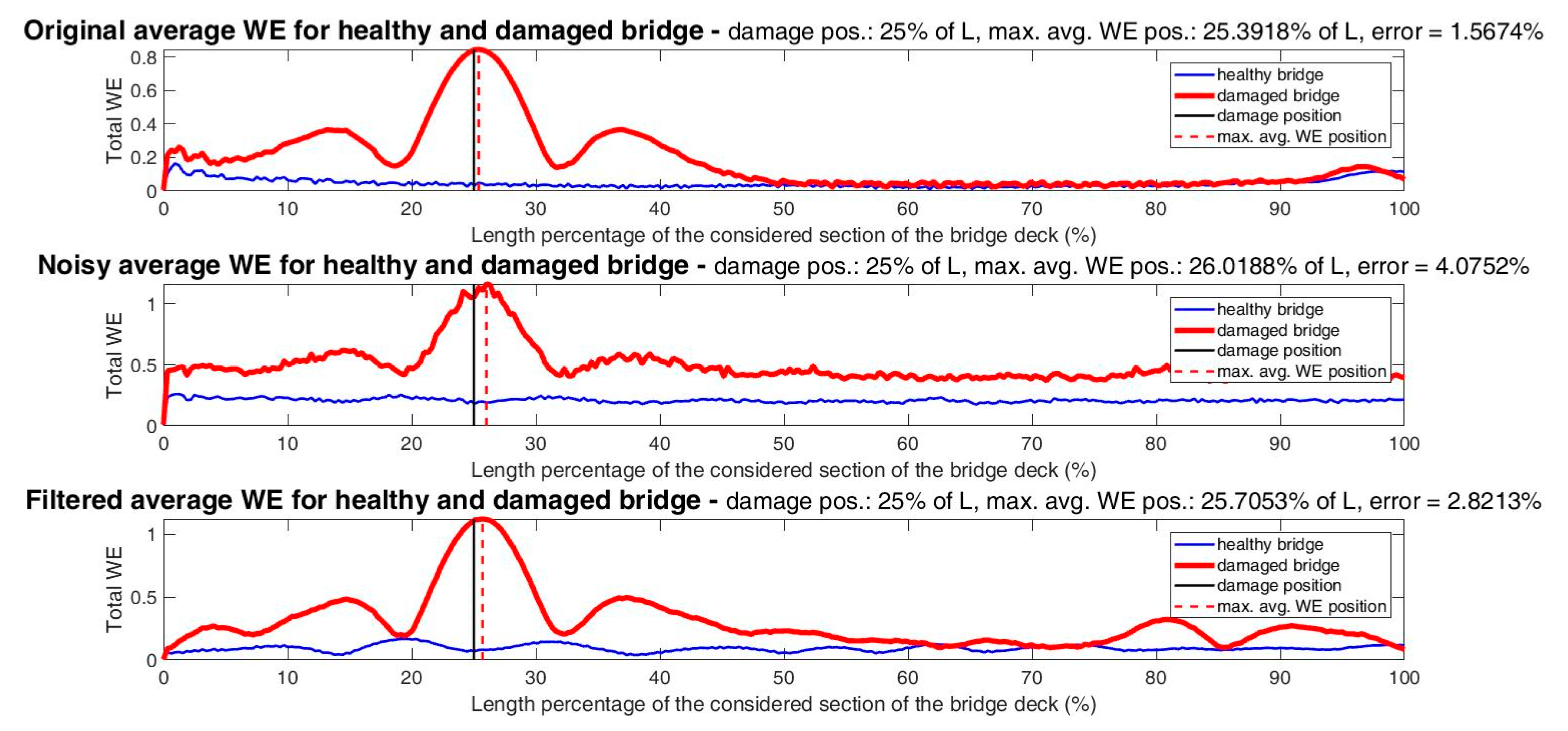
Lastly, for an easy visualization, in
Figure 13 just the average WE is shown for a healthy and a damaged bridge deck and for the three scenarios of signals (original, noisy and filtered), with the respective percentage of error. It is important to notice that if the considered vehicle speed is set to 2, 3, 4 and 5 m/s, the percentage of error for the damage location considering the original signals changes to 1.85%, 2.15%, 2.49% and 2.91%, respectively. Whereas, for the speed of 1 m/s, the corresponding percentage of error is 1.57%, as it can be observed in
Figure 13.
Likewise, the damage location was changed and set on the midspan between pylons (0.50 L) and at 0.75 L. The noisy and filtered CWT diagrams for the area of interest are shown in
Figure 14 for damage at 0.50 L and in
Figure 15 for damage at 0.75 L. Whereas, the total average WE energy from original, noisy and filtered signals are shown in
Figure 16 for a healthy and a damaged bridge deck at 0.50 L and in
Figure 17 for a healthy and a damaged bridge deck at 0.75 L.
The CWT diagrams shown in
Figure 14 and
Figure 15 are overwhelming for damage identification at 0.50 L and 0.75 L, respectively. By using the noisy signals, the damage identification is evident because of the change of color representing higher wavelets’ coefficients. Whereas, by using the filtered signals, the CWT diagrams are clearer and the damage identification is even easier.
As for the total average WE, that WE is high for both cases of damaged bridge deck (at 0.50 L and 0.75 L) and low for the healthy corresponding cases (see
Figure 16 and
Figure 17). Moreover, the WE for the damaged signals is accumulated in the vicinity of the damage position and, in this way, the differences between the positions of the maximum values of the average WE and the values of the respective damage positions are very small, whereas, for the healthy cases, there are no remarkable accumulations.
Taking into account the case of damage at 50% of L (
Figure 16), the percentage of error for the damage identification by considering the maximum value of the WE accumulation was 0.31% for the original signal, then it increased three times for the noisy signal and, finally, it came back to the same original absolute value for the filtered signal (0.31%). For the original signal, damage was identified slightly to the right of the real position, whereas, for both the noisy and filtered signals, damage was identified slightly to the left of the real position.
On the other hand, considering the damage at 75% of L (
Figure 17), the absolute percentages of error for the damage identification were 0.10%, 0.73% and 0.31% for original, noisy and filtered signals, respectively. For the original signal, the damage was identified slightly to the left of the real position, whereas, for noisy and filtered signals, it was identified slightly to the right of the real position.
Thus, by using the acceleration signals and following sequential steps for consolidating the WEAM, damage was detected and located with high accuracy; no matter its position on the bridge deck, the condition of the signals (original, noisy or filtered), the quantity of the measurement points (single or average of multiple points) nor the location of the measurement points (on the damage, close or far away). It is important to mention that once the area of interest is determined on the CWT diagrams, damage identification becomes easy on the very same CWT diagrams and the total average WE diagrams will confirm the existence and location of damage. Furthermore, those WE diagrams help provide a value of the maximum WE to quantify how severe the damage is.
The same case of damage analyzed above by using the acceleration signals is henceforth studied with the corresponding displacement signals from the vibration of the bridge. In
Figure 18 the CWT diagrams from original displacement signals at three different positions are shown for a healthy and a damaged bridge deck at 25% of L. A huge initial scale range was used (from 1 to 10,000) in order to explore a clue of damage and again, at a glance, no clear indications of damage were found.
After performing the signals’ subtractions and extensions, as well as using the useful range of scale (from 250 to 500), the previous diagrams now look like those in
Figure 19. In the new figure it is possible to see that there are no border effects. Moreover, the energy for the healthy cases (
Figure 19a) is accumulated around the measurement point, as expected, but that energy is low, as it can be observed in
Figure 20a.
On the other hand, for the damaged case, all the energy is accumulated around the damaged location no matter the measurement point. Additionally, out of the zone of damage the energy is practically zero, which was achieved by means of the signals’ subtraction, which is why the shape of the energy expansion looks almost identical for all the cases of damage with different measurement positions (
Figure 19b). However, the energy is higher as long as the measurement point is closer to damage, as it can be seen in
Figure 20b.
Part of the energy accumulated in the zone of damage is lost during the subtraction, but the advantage is that no energy will be displayed in the zone of the measurement when damage is not there and the plots will look clearer. Whereas the disadvantage of lost energy because of the subtraction and the far measurements can be compensated with the average of the WE.
Now, in the interest of brevity, just the filtered displacement signals were used to calculate the total average WE diagrams, because this is the most realistic scenario to deal with. That is, the signals will always contain noise and a filter has to be used to reduce that noise. Thus, in
Figure 21, the corresponding total average WE diagrams for healthy and damaged bridge deck at 0.25 L, 0.50 L and 0.75 from filtered displacement signals are shown. In
Figure 21 the difference of WE between healthy and damaged cases is evident; therefore, the existence and location of damage was confirmed and the percentage of error was again very low (no more than 1.60%).
In order to quantify the severity of damage and the sensitivity of this method, four different magnitudes of this type of damage on the bridge deck, additionally to the one studied above, were simulated at 25% of L, for a total of five cases, that is: 0.10 h, 0.20 h, 0.30 h, 0.40 h, and 0.50 h of height reduction. The total average WE’s for all these cases are shown in
Figure 22. The signals used for those plots were the acceleration signals after being added with 15% of noise and then filtered. This was in order to analyze the most common signals available in real SHM (acceleration) and their condition (noisy and then filtered). The tiny differences of the healthy WE’s for the different diagrams of
Figure 22, even when the original healthy signals are obviously the same, are due to the randomness of the added noise. The code was configured to analyze one healthy case and one damaged case at the same time. Consequently, the healthy case was run for each case of damage and the noise was not the same, thus the filtered WE’s were not identical.
Additionally, in
Figure 23 it is possible to see the healthy average WE and all the damaged average WE’s together in the same plot, for an easier visualization of the impact of the magnitude of damage in the WE and the sensitivity of this method.
In
Table 1, a summary of the results shown in
Figure 22 and
Figure 23 is presented. In the table, as expected, it is clear the tendency about the increment of damaged WE and ratio of maximum average damaged WE/maximum average healthy WE as the severity of damage increases; as well as the increment of the damage localization accuracy as the magnitude of damage increases. Nevertheless, the highest percentage of error in those cases presented in
Table 1 (5.33%) is still very acceptable considering the low magnitude of damage (0.10 h), high percentage of noise (15%) and the kind of signal used (acceleration instead of displacement).
The experimental validation of the quantification of damage will be performed by using a lab model in future works, since in the real bridge is not possible. Cracks of different severity will be induced on the deck of the lab model in order to correlate the different WE curves with the corresponding level of damage.
Finally, in regards to the numerical part of this article, for the other type of damage (damaged cable) just three cases were analyzed: healthy bridge, bridge with damaged cable T1S5, and bridge with damaged cable T10S7. For all those cases, the total length of the bridge had to be considered (407.21 m) and again three points of measurement were established, this time at 0.33 L, 0.50 L and 0.66 L instead of 0.25 L, 0.50 L and 0.75 L. This was because the first point and the last one would have been located practically on the pylons and it was not convenient, then the best distribution to keep just three measurement points was two points at 1 L/3 and 2 L/3 and one additional at the mid-span (1 L/2).
The case of damaged cable T1S5 corresponds with the real case analyzed in the next section, where cable 1 of the semi-harp 5 collapsed and whose failure was described previously. The anchor of this cable on the deck (according to the lateral view of
Figure 3 from left to right) is found at 0.77 L, and there was no numerical point of measurement at this location (the nearest one at 0.66 L which represents 42 m of distance). The tension of this cable was reduced by 40%.
As for the damaged cable T10S7, this cable is number 10 of semi-harp 7 and is anchored at 0.42 L (practically between the first and second numerical measurement points with around 32 m of distance) and its tension was reduced by 50%. The purpose of this latest case was to analyze other locations of damaged cable and the magnitude of lost tension.
Since the considered current length of the bridge is twice the previous length taken into account for analyzing damage on the deck, in order to reduce the computing time and avoid a crash up of any of the two codes used with either ANSYS© or MATLAB©, the sampling frequency was halved (32 Hz). The moving force represented again a vehicle type T3S3 fully loaded (54,000 kgf); however, now to cross the whole bridge (L = 407.21 m) with a speed of 2 m/s. The selected lane was the right lane of the upstream side and the measurements were established on the nodes of the right side of the deck (upstream side) where the moving force does not pass. Higher vehicle speeds were simulated with excellent results for detecting and locating damage with good accuracy, but just the lowest speeds were included in this article in the interest of brevity.
As it was explained before, by the time the fault of the T1S5 occurred, the instrumentation was not planned for acquiring useful data for being used with this WEAM and, unfortunately, the acceleration sensors were not placed on the deck. Thus, considering the available instrumentation when the cable broke, the strain measurements of the deck would be the most useful ones and; therefore, for these numerical simulations, just the displacement signals were used.
In
Figure 24, the original CWT diagrams are shown for the healthy case and bridge with damaged cable at 0.77 L, before and after the signals subtraction, just to show that, even when the convenient range of scale had not been selected yet, the subtraction was very useful to start providing a clue of the damage location. In
Figure 25, the original CWT diagrams without border effects and for the area of interest are shown for the three cases (healthy, damaged cable at 0.77 L and damaged cable at 0.42 L), and the perspective to observe the magnitude of the coefficients for the damaged cable T1S5 is shown in
Figure 26. Lastly, in
Figure 27, the corresponding total filtered average WE’s can be observed.
In
Figure 24, small differences between the healthy bridge case and the bridge with damaged cable at 0.77 L before the signals subtraction are observed for the original wide range of scale (1 to 10,000). However, after the signals subtraction, the corresponding CWT diagrams show evident inclinations of the highest coefficients toward the damage location for the same range of scale; this helped to provide a clue of the damage location and define the range of scale to calculate the WE.
The detection and localization of the damaged cables were possible by using the same range of scale defined as the most convenient for damage on the deck (250 to 500). However, in order to use a wider range of scale where the highest coefficients have influence around the damage locations, the convenient range of scale for these cases of damaged cables was defined from 250 to 1500 and the corresponding CWT diagrams for the area of interest are exposed in
Figure 25, the evidences of damage are clear. Additionally, in
Figure 26 the magnitude of the coefficients around 1000 can be appreciated for the case of damaged cable T1S5, which is useful to compare with the real case and numerical damage on deck.
Finally, in
Figure 27, the total filtered average WE for each case of damaged cable compared with the healthy case are presented. For the damaged cable T1S5 (at 0.77 L), the percentage of error in the damage location was 2.20%. On the other hand, the maximum WE of the damaged curve was approximately 2.5 times the maximum WE of the healthy case and the same magnitude higher (2.5), with respect to the second bigger ridge of the same damaged curve. That is, the ridge of maximum WE accumulation indicating the damage location at 0.77 L is high enough to be distinguished to the second highest ridge of the same curve and the first highest ridge of the healthy curve. For the case of damaged cable at 0.42 L, the maximum WE increased 1.6 times with respect to the corresponding value for damaged cable at 0.77 L, which can be due to the more critical position of this cable and greater loss of tension percentage. The percentage of error for its damage location was also very acceptable (4.47%) considering that the signals were added with noise and then filtered.
The significant increments of the WE for the cases presented in
Figure 27, in relation to the cases of damaged deck shown previously, are attributed to the damage nature and the consideration of a wider range of scale.
Thus, in this section it was demonstrated that, if the WEAM is applied as it was explained in
Section 2, detection and location of different types of damage in a vehicular bridge is possible with high precision and by using just a few sensors. Moreover, this method also allows distinguishing among different severities of damage.


 ,
, 




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}