
A Simple and Safe Strategy for Improving the Fuel Economy of a Fuel Cell Vehicle



Abstract
:1. Introduction
2. Fuel Cell Hybrid Power System
3. Energy Management and Optimization Unit
4. Performance Validation
4.1. Constant Load Cycle
4.2. Load Profile: Variable Load Cycle
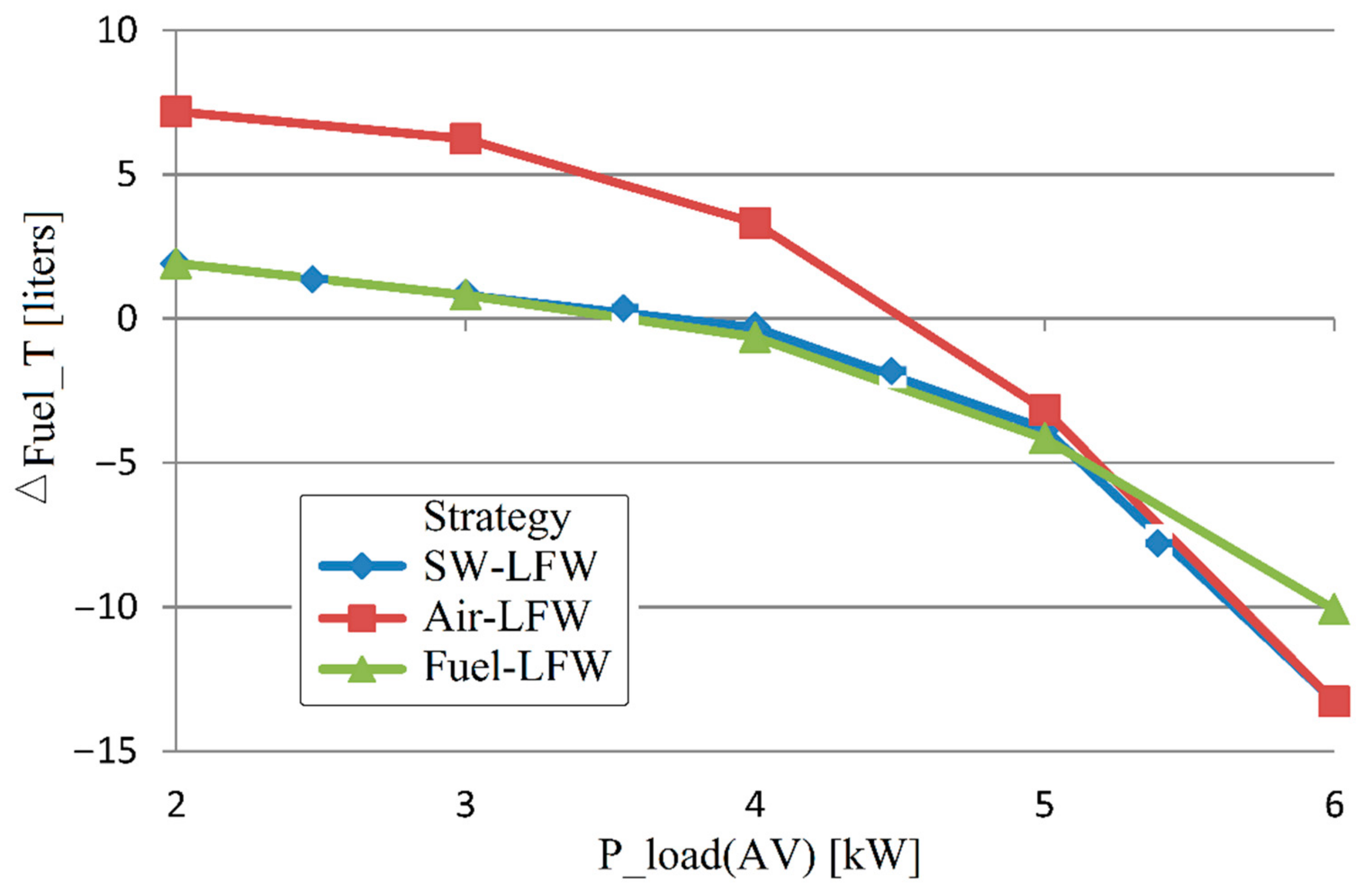
4.2.1. The First Variable Load Cycle with Different Power Pload(AV) Levels
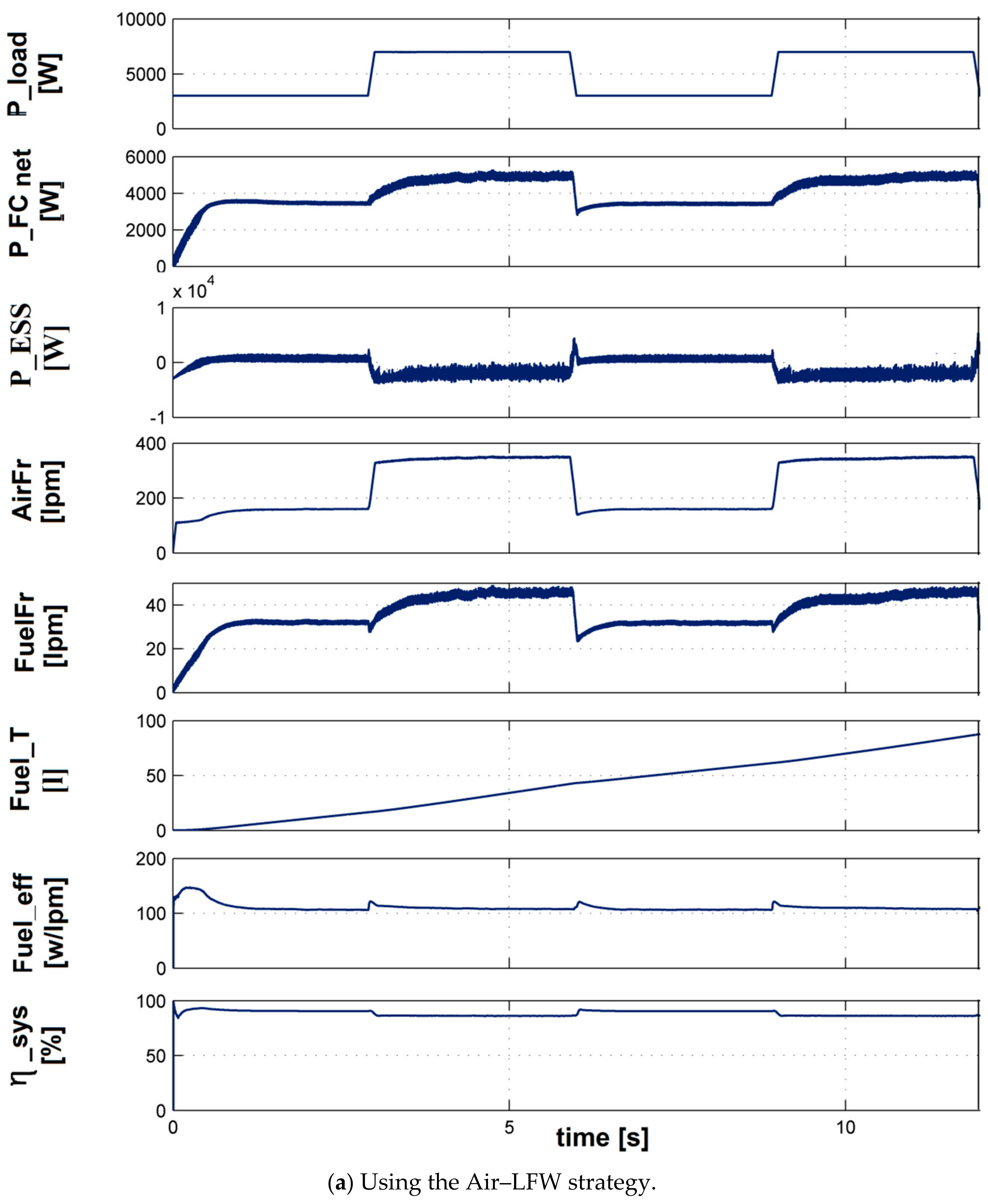
4.2.2. The Second Variable Load Cycle with 3/7 kW Load Pulses
4.2.3. The Third Load Profile (Symmetrical Stair Up and Down)
5. Discussion and Next Works
- Testing the relationship between fuel consumption and average load for different load demand profiles.
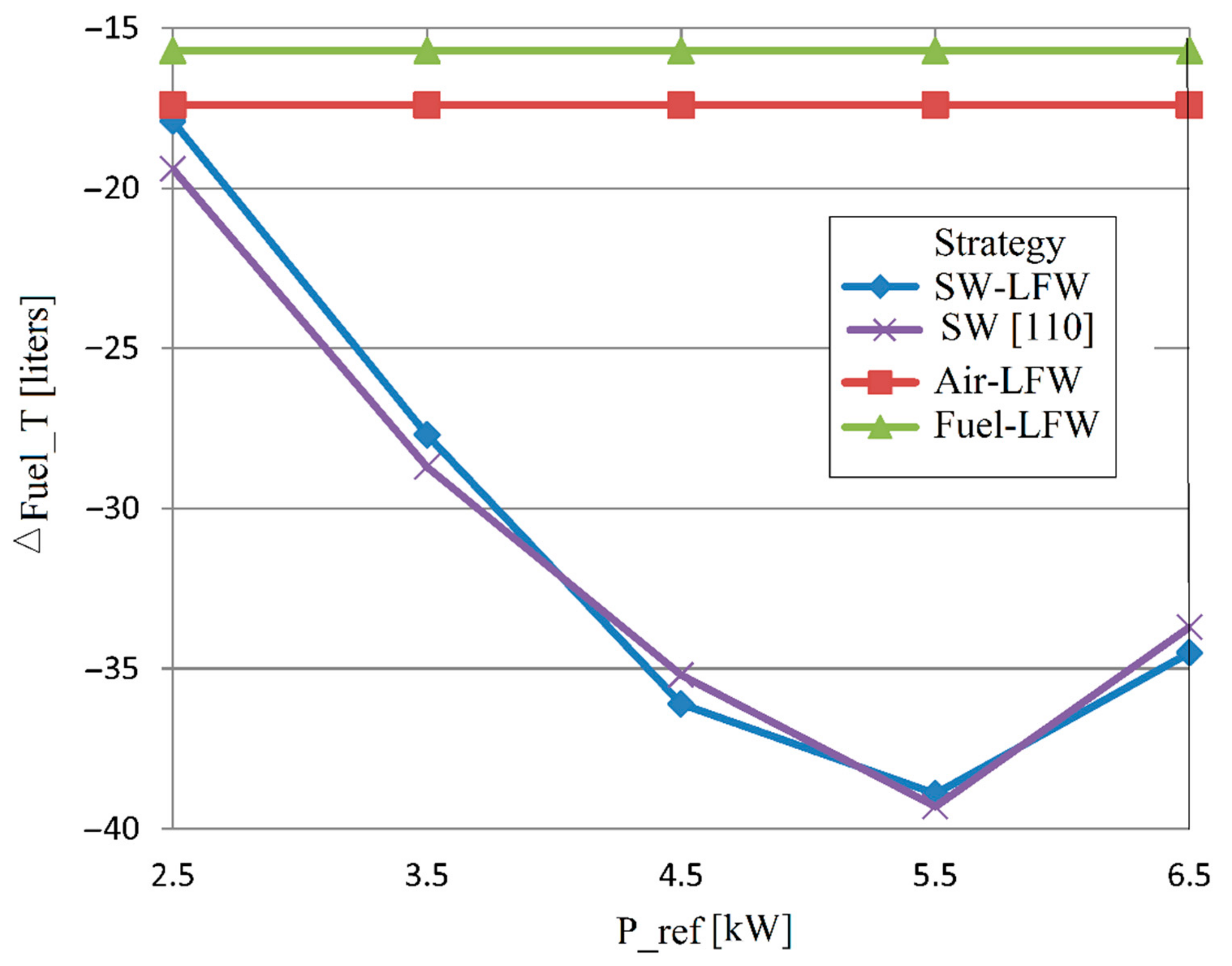
- Finding the best threshold between the high and low loading ranges. This value of Pref = 4.5 kW was obtained on the basis of the sensitivity investigation functions for both variable and constant loads. The load-following management switches to the fuel and air regulators, if the load is higher or lower than this threshold. This value and other values close to this are to be considered for further tests under a different load profile.
- Inclusion of a monitoring and energy management system for the battery. In this study, the system load demand was clearly sustained by the power supplied by the FC system and the battery storage device functions in a charge-sustained mode. Thus, the size of the battery might be reduced. Additionally, the battery’s life time increases by avoiding the charge–discharge cycles that appear in most strategies, based on SOC monitoring. An advanced energy management system [121,122] and a battery aging modeling [123,124] is to be included to evaluate the advantage of the LFW control over the battery life.
- Reducing the number of switches of the fueling regulators’ references in the event of a high dynamic load. The SW–LFW strategy used a 200 W hysteresis controller (see Figure 3) instead of a simple comparator, to switch the reference to the inputs of the fueling regulators ( and ). Different values of the hysteresis band for the hysteresis controller is to be tested, in combination with an appropriate filtering of the load power.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gielen, D.; Boshell, F.; Saygin, D.; Bazilian, M.D.; Wagner, N.; Gorini, R. The role of renewable energy in the global energy transformation. Energy Strategy Rev. 2019, 24, 38–50. [Google Scholar] [CrossRef]
- Hesselink, L.X.W.; Chappin, E.J.L. Adoption of energy efficient technologies by households—Barriers, policies and agent-based modelling studies. Renew Sustain. Energy Rev. 2019, 99, 29–41. [Google Scholar] [CrossRef]
- Wang, F.-C.; Hsiao, Y.-S.; Yang, Y.-Z. The Optimization of Hybrid Power Systems with Renewable Energy and Hydrogen Generation. Energies 2018, 11, 1948. [Google Scholar] [CrossRef] [Green Version]
- Bukar, A.L.; Tan, C.W. A review on stand-alone photovoltaic-wind energy system with fuel cell: System optimization and energy management strategy. J. Clean. Prod. 2019, 221, 73–88. [Google Scholar] [CrossRef]
- Sulaiman, N.; Hannan, M.; Mohamed, A.; Ker, P.; Majlan, E.; Daud, W.W. Optimization of energy management system for fuel-cell hybrid electric vehicles: Issues and recommendations. Appl. Energy 2018, 228, 2061–2079. [Google Scholar] [CrossRef]
- Sorrentino, M.; Cirillo, V.; Nappi, L. Development of flexible procedures for co-optimizing design and control of fuel cell hybrid vehicles. Energy Convers. Manag. 2019, 185, 537–551. [Google Scholar] [CrossRef]
- Bizon, N. Hybrid power sources (HPSs) for space applications: Analysis of PEMFC/Battery/SMES HPS under unknown load containing pulses. Renew. Sustain. Energy Rev. 2019, 105, 14–37. [Google Scholar] [CrossRef]
- Pan, Z.; An, L.; Wen, C. Recent advances in fuel cells based propulsion systems for unmanned aerial vehicles. Appl. Energy 2019, 240, 473–485. [Google Scholar] [CrossRef]
- Bizon, N. Real-time optimization strategy for fuel cell hybrid power sources with load-following control of the fuel or air flow. Energy Convers. Manag. 2018, 157, 13–27. [Google Scholar] [CrossRef]
- Olatomiwa, L.; Mekhilef, S.; Ismail, M.; Moghavvemi, M. Energy management strategies in hybrid renewable energy systems: A review. Renew. Sustain. Energy Rev. 2016, 62, 821–835. [Google Scholar] [CrossRef]
- Bizon, N. Optimal Operation of Fuel Cell/Wind Turbine Hybrid Power System under Turbulent Wind and Variable Load. Appl. Energy 2018, 212, 196–209. [Google Scholar] [CrossRef]
- Priya, K.; Sathishkumar, K.; Rajasekar, N. A comprehensive review on parameter estimation techniques for Proton Exchange Membrane fuel cell modelling. Renew. Sustain. Energy Rev. 2018, 93, 121–144. [Google Scholar] [CrossRef]
- Yue, M.; Jemei, S.; Gouriveau, R.; Zerhouni, N. Review on health-conscious energy management strategies for fuel cell hybrid electric vehicles: Degradation models and strategies. Int. J. Hydrogen Energy 2019, 44, 6844–6861. [Google Scholar] [CrossRef]
- Bizon, N. Effective mitigation of the load pulses by controlling the battery/SMES hybrid energy storage system. Appl. Energy 2018, 229, 459–473. [Google Scholar] [CrossRef]
- Dafalla, A.M.; Jiang, J. Stresses and their impacts on proton exchange membrane fuel cells: A review. Int. J. Hydrogen Energy 2018, 43, 2327–2348. [Google Scholar] [CrossRef]
- Chen, H.; Zhao, X.; Zhang, T.; Pei, P. The reactant starvation of the proton exchange membrane fuel cells for vehicular applications: A review. Energy Convers. Manag. 2019, 182, 282–298. [Google Scholar] [CrossRef]
- Luo, Y.; Jiao, K. Cold start of proton exchange membrane fuel cell. Prog. Energy Combust. Sci. 2018, 64, 29–61. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, P.; Chen, H.; Pei, P. A review of automotive proton exchange membrane fuel cell degradation under start-stop operating condition. Appl. Energy 2018, 223, 249–262. [Google Scholar] [CrossRef]
- Dijoux, E.; Steiner, N.Y.; Benne, M.; Péra, M.-C.; Pérez, B.G. A review of fault tolerant control strategies applied to proton exchange membrane fuel cell systems. J. Power Sources 2017, 359, 119–133. [Google Scholar] [CrossRef] [Green Version]
- Das, V.; Padmanaban, S.; Venkitusamy, K.; Selvamuthukumaran, R.; Blaabjerg, F.; Siano, P. Recent advances and challenges of fuel cell based power system architectures and control—A review. Renew. Sustain. Energy Rev. 2017, 73, 10–18. [Google Scholar] [CrossRef]
- Bizon, N. Load-following mode control of a standalone renewable/fuel cell hybrid power source. Energy Convers. Manag. 2014, 77, 763–772. [Google Scholar] [CrossRef]
- Daud, W.; Rosli, R.; Majlan, E.; Hamid, S.; Mohamed, R.; Husaini, T. PEM fuel cell system control: A review. Renew. Energy 2017, 113, 620–638. [Google Scholar] [CrossRef]
- Bizon, N.; Radut, M.; Oproescu, M. Energy control strategies for the Fuel Cell Hybrid Power Source under unknown load profile. Energy 2015, 86, 31–41. [Google Scholar] [CrossRef]
- Ahmadi, P.; Torabi, S.H.; Afsaneh, H.; Sadegheih, Y.; Ganjehsarabi, H.; Ashjaee, M. The effects of driving patterns and PEM fuel cell degradation on the lifecycle assessment of hydrogen fuel cell vehicles. Int. J. Hydrogen Energy 2020, 45, 3595–3608. [Google Scholar] [CrossRef]
- Wang, F.-C.; Lin, K.-M. Impacts of Load Profiles on the Optimization of Power Management of a Green Building Employing Fuel Cells. Energies 2018, 12, 57. [Google Scholar] [CrossRef] [Green Version]
- Zhao, D.; Xu, L.; Huangfu, Y.; Dou, M.; Liu, J. Semi-physical modeling and control of a centrifugal compressor for the air feeding of a PEM fuel cell. Energy Convers. Manag. 2017, 154, 380–386. [Google Scholar] [CrossRef]
- Han, J.; Yu, S. Ram air compensation analysis of fuel cell vehicle cooling system under driving modes. Appl. Therm. Eng. 2018, 142, 530–542. [Google Scholar] [CrossRef]
- Zhang, H.; Li, X.; Liu, X.; Yan, J. Enhancing fuel cell durability for fuel cell plug-in hybrid electric vehicles through strategic power management. Appl. Energy 2019, 241, 483–490. [Google Scholar] [CrossRef]
- Pukrushpan, J.T.; Stefanopoulou, A.G.; Peng, H. Control of fuel cell breathing. IEEE Control Syst. Mag. 2004, 24, 30–46. [Google Scholar]
- Ahn, J.-W.; Choe, S.-Y. Coolant controls of a PEM fuel cell system. J. Power Sources 2008, 179, 252–264. [Google Scholar] [CrossRef]
- Beirami, H.; Shabestari, A.Z.; Zerafat, M.M. Optimal PID plus fuzzy controller design for a PEM fuel cell air feed system using the self-adaptive differential evolution algorithm. Int. J. Hydrogen Energy 2015, 40, 9422–9434. [Google Scholar] [CrossRef]
- Liu, Z.; Li, L.; Ding, Y.; Deng, H.; Chen, W. Modeling and control of an air supply system for a heavy duty PEMFC engine. Int. J. Hydrogen Energy 2016, 41, 16230–16239. [Google Scholar] [CrossRef]
- Talj, R.; Ortega, R.; Astolfi, A. Passivity and robust PI control of the air supply system of a PEM fuel cell model. Automatica 2011, 47, 2554–2561. [Google Scholar] [CrossRef]
- Cano, M.H.; Mousli, M.I.A.; Kelouwani, S.; Agbossou, K.; Hammoudi, M.; Dubéc, Y. Improving a free air breathing proton exchange membrane fuel cell through the Maximum Efficiency Point Tracking method. J. Power Sources 2017, 345, 264–274. [Google Scholar] [CrossRef]
- Baroud, Z.; Benmiloud, M.; Benalia, A.; Ocampo-Martinez, C. Novel hybrid fuzzy-PID control scheme for air supply in PEM fuel-cell-based systems. Int. J. Hydrogen Energy 2017, 42, 10435–10447. [Google Scholar] [CrossRef] [Green Version]
- Hasikos, J.; Sarimveis, H.; Zervas, P.; Markatos, N. Operational optimization and real-time control of fuel-cell systems. J. Power Sources 2009, 193, 258–268. [Google Scholar] [CrossRef]
- Nejad, H.C.; Farshad, M.; Gholamalizadeh, E.; Askarian, B.; Akbarimajd, A. A novel intelligent-based method to control the output voltage of Proton Exchange Membrane Fuel Cell. Energy Convers. Manag. 2019, 185, 455–464. [Google Scholar] [CrossRef]
- Arce, A.; Alejandro, J.; Bordons, C.; Daniel, R. Real-time implementation of a constrained MPC for efficient airflow control in a PEM fuel cell. IEEE Trans. Ind. Electron. 2010, 57, 1892–1905. [Google Scholar] [CrossRef]
- Ziogou, C.; Papadopoulou, S.; Pistikopoulos, E.; Georgiadis, M.; Voutetakis, S. Model-Based Predictive Control of Integrated Fuel Cell Systems—From Design to Implementation. Adv. Energy Syst. Eng. 2016, 2017, 387–430. [Google Scholar] [CrossRef]
- Ziogou, C.; Papadopoulou, S.; Georgiadis, M.C.; Voutetakis, S. On-line nonlinear model predictive control of a PEM fuel cell system. J. Process. Control. 2013, 23, 483–492. [Google Scholar] [CrossRef]
- Barzegari, M.M.; Alizadeh, E.; Pahnabi, A.H. Grey-box modeling and model predictive control for cascade-type PEMFC. Energy 2017, 127, 611–622. [Google Scholar] [CrossRef]
- Ziogou, C.; Voutetakis, S.; Georgiadis, M.C.; Papadopoulou, S. Model predictive control (MPC) strategies for PEM fuel cell systems—A comparative experimental demonstration. Chem. Eng. Res. Des. 2018, 131, 656–670. [Google Scholar] [CrossRef]
- Laghrouche, S.; Harmouche, M.; Ahmed, F.S.; Chitour, Y. Control of PEMFC Air-Feed System Using Lyapunov-Based Robust and Adaptive Higher Order Sliding Mode Control. IEEE Trans. Control. Syst. Technol. 2014, 23, 1. [Google Scholar] [CrossRef] [Green Version]
- Pilloni, A.; Pisano, A.; Usai, E. Observer-Based Air Excess Ratio Control of a PEM Fuel Cell System via High-Order Sliding Mode. IEEE Trans. Ind. Electron. 2015, 62, 5236–5246. [Google Scholar] [CrossRef] [Green Version]
- Deng, H.; Li, Q.; Chen, W.; Zhang, G. High-Order Sliding Mode Observer Based OER Control for PEM Fuel Cell Air-Feed System. IEEE Trans. Energy Convers. 2017, 33, 232–244. [Google Scholar] [CrossRef]
- Sankar, K.; Jana, A.K. Nonlinear multivariable sliding mode control of a reversible PEM fuel cell integrated system. Energy Convers. Manag. 2018, 171, 541–565. [Google Scholar] [CrossRef]
- Deng, H.; Li, Q.; Cui, Y.; Zhu, Y.; Chen, W. Nonlinear controller design based on cascade adaptive sliding mode control for PEM fuel cell air supply systems. Int. J. Hydrogen Energy 2019, 44, 19357–19369. [Google Scholar] [CrossRef]
- Saadi, R.; Kraa, O.; Ayad, M.; Becherif, M.; Ghodbane, H.; Bahri, M.; Aboubou, A. Dual loop controllers using PI, sliding mode and flatness controls applied to low voltage converters for fuel cell applications. Int. J. Hydrogen Energy 2016, 41, 19154–19163. [Google Scholar] [CrossRef]
- Derbeli, M.; Farhat, M.; Barambones, O.; Sbita, L. Control of PEM fuel cell power system using sliding mode and super-twisting algorithms. Int. J. Hydrogen Energy 2017, 42, 8833–8844. [Google Scholar] [CrossRef]
- Kunusch, C.; Puleston, P.F.; Mayosky, M.A.; Riera, J. Sliding Mode Strategy for PEM Fuel Cells Stacks Breathing Control Using a Super-Twisting Algorithm. IEEE Trans. Control. Syst. Technol. 2008, 17, 167–174. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Torres, D.; Riu, D.; Sename, O. Reduced-order Robust Control of a Fuel Cell Air Supply System. IFAC-PapersOnLine 2017, 50, 96–101. [Google Scholar] [CrossRef]
- Sun, J.; Kolmanovsky, I. Load governor for fuel cell oxygen starvation protection: A robust nonlinear reference governor approach. IEEE Trans. Contr. Syst. Technol. 2005, 13, 911–920. [Google Scholar]
- Han, J.; Yu, S.; Yi, S. Adaptive control for robust air flow management in an automotive fuel cell system. Appl. Energy 2017, 190, 73–83. [Google Scholar] [CrossRef]
- He, Y.; Xing, L.; Zhang, Y.; Zhang, J.; Cao, F.; Xing, Z. Development and experimental investigation of an oil-free twin-screw air compressor for fuel cell systems. Appl. Therm. Eng. 2018, 145, 755–762. [Google Scholar] [CrossRef]
- Li, Q.; Chen, W.; Liu, Z.; Guo, A.; Liu, S. Control of proton exchange membrane fuel cell system breathing based on maximum net power control strategy. J. Power Sources 2013, 241, 212–218. [Google Scholar] [CrossRef]
- Mane, S.; Mejari, M.; Kazi, F.; Singh, N. Improving Lifetime of Fuel Cell in Hybrid Energy Management System by Lure–Lyapunov-Based Control Formulation. IEEE Trans. Ind. Electron. 2017, 64, 6671–6679. [Google Scholar] [CrossRef]
- Ramos-Paja, C.A.; Spagnuolo, G.; Petrone, G.; Mamarelis, E. A perturbation strategy for fuel consumption minimization in polymer electrolyte membrane fuel cells: Analysis, Design and FPGA implementation. Appl. Energy 2014, 119, 21–32. [Google Scholar] [CrossRef]
- Bizon, N.; Lopez-Guede, J.M.; Kurt, E.; Thounthong, P.; Mazare, A.G.; Ionescu, L.M.; Iana, G. Hydrogen economy of the fuel cell hybrid power system optimized by air flow control to mitigate the effect of the uncertainty about available renewable power and load dynamics. Energy Convers. Manag. 2019, 179, 152–165. [Google Scholar] [CrossRef]
- Pukrushpan, J.T.; Stefanopoulou, A.G.; Peng, H. Control of Fuel Cell Power Systems; Springer International Publishing: New York, NY, USA, 2004. [Google Scholar]
- Zhong, D.; Lin, R.; Liu, D.; Cai, X. Structure optimization of anode parallel flow field for local starvation of proton exchange membrane fuel cell. J. Power Sources 2018, 403, 1–10. [Google Scholar] [CrossRef]
- Hong, L.; Chen, J.; Liu, Z.; Huang, L.; Wu, Z. A nonlinear control strategy for fuel delivery in PEM fuel cells considering nitrogen permeation. Int. J. Hydrogen Energy 2017, 42, 1565–1576. [Google Scholar] [CrossRef]
- Bao, C.; Ouyang, M.; Yi, B. Modeling and control of air stream and hydrogen flow with recirculation in a PEM fuel cell system—I. Control-oriented modeling. Int. J. Hydrogen Energy 2006, 31, 1879–1896. [Google Scholar] [CrossRef]
- Bao, C.; Ouyang, M.; Yi, B. Modeling and control of air stream and hydrogen flow with recirculation in a PEM fuel cell system—II. Linear and adaptive nonlinear control. Int. J. Hydrogen Energy 2006, 31, 1897–1913. [Google Scholar] [CrossRef]
- He, J.; Choe, S.-Y.; Hong, C.-O. Analysis and control of a hybrid fuel delivery system for a polymer electrolyte membrane fuel cell. J. Power Sources 2008, 185, 973–984. [Google Scholar] [CrossRef]
- He, J.; Ahn, J.; Choe, S.-Y. Analysis and control of a fuel delivery system considering a two-phase anode model of the polymer electrolyte membrane fuel cell stack. J. Power Sources 2011, 196, 4655–4670. [Google Scholar] [CrossRef]
- Thounthong, P.; Mungporn, P.; Pierfederici, S.; Guilbert, D.; Bizon, N. Adaptive Control of Fuel Cell Converter Based on a New Hamiltonian Energy Function for Stabilizing the DC Bus in DC Microgrid Applications. Mathematics 2020, 8, 2035. [Google Scholar] [CrossRef]
- Luna, J.; Ocampo-Martinez, C.; Serra, M. Nonlinear predictive control for the concentrations profile regulation under unknown reaction disturbances in a fuel cell anode gas channel. J. Power Sources 2015, 282, 129–139. [Google Scholar] [CrossRef] [Green Version]
- Park, G.; Gajic, Z. A Simple Sliding Mode Controller of a Fifth-Order Nonlinear PEM Fuel Cell Model. IEEE Trans. Energy Convers. 2013, 29, 65–71. [Google Scholar] [CrossRef]
- Matraji, I.; Laghrouche, S.; Jemei, S.; Wack, M. Robust control of the PEM fuel cell air-feed system via sub-optimal second order sliding mode. Appl. Energy 2013, 104, 945–957. [Google Scholar] [CrossRef]
- Baik, K.D.; Kim, M.S. Characterization of nitrogen gas crossover through the membrane in proton-exchange membrane fuel cells. Int. J. Hydrogen Energy 2011, 36, 732–739. [Google Scholar] [CrossRef]
- Steinberger, M.; Geiling, J.; Oechsner, R.; Frey, L. Anode recirculation and purge strategies for PEM fuel cell operation with diluted hydrogen feed gas. Appl. Energy 2018, 232, 572–582. [Google Scholar] [CrossRef]
- Chen, Y.-S.; Yang, C.-W.; Lee, J.-Y. Implementation and evaluation for anode purging of a fuel cell based on nitrogen concentration. Appl. Energy 2014, 113, 1519–1524. [Google Scholar] [CrossRef]
- Piffard, M.; Gerard, M.; Bideaux, E.; Da Fonseca, R.; Massioni, P. Control by state observer of PEMFC anodic purges in dead-end operating mode. IFAC-PapersOnLine 2015, 48, 237–243. [Google Scholar] [CrossRef]
- Rabbani, A.; Rokni, M. Effect of nitrogen crossover on purging strategy in PEM fuel cell systems. Appl. Energy 2013, 111, 1061–1070. [Google Scholar] [CrossRef] [Green Version]
- Mahoney, F.M. Reduction-Oxidation Tolerant Electrodes for Solid Oxide Fuel Cells. U.S. Patent 20,100,159,356, 24 June 2010. [Google Scholar]
- Ahluwalia, R.; Wang, X. Buildup of nitrogen in direct hydrogen polymer-electrolyte fuel cell stacks. J. Power Sources 2007, 171, 63–71. [Google Scholar] [CrossRef]
- Pan, T.; Shen, J.; Sun, L.; Lee, K.Y. Thermodynamic modelling and intelligent control of fuel cell anode purge. Appl. Therm. Eng. 2019, 154, 196–207. [Google Scholar] [CrossRef]
- Koski, P.; Perez, L.C.; Ihonen, J. Comparing Anode Gas Recirculation with Hydrogen Purge and Bleed in a Novel PEMFC Laboratory Test Cell Configuration. Fuel Cells 2015, 15, 494–504. [Google Scholar] [CrossRef]
- Promislow, K.; St-Pierre, J.; Wetton, B. A simple, analytic model of polymer electrolyte membrane fuel cell anode recirculation at operating power including nitrogen crossover. J. Power Sources 2011, 196, 10050–10056. [Google Scholar] [CrossRef]
- Taghiabadi, M.M.; Zhiani, M. Degradation analysis of dead-ended anode PEM fuel cell at the low and high thermal and pressure conditions. Int. J. Hydrogen Energy 2019, 44, 4985–4995. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, X.; Guo, L.; Liu, H. Overall and local effects of operating conditions in PEM fuel cells with dead-ended anode. Int. J. Hydrogen Energy 2017, 42, 4690–4698. [Google Scholar] [CrossRef] [Green Version]
- Pérez, L.C.; Rajala, T.; Ihonen, J.; Koski, P.; Sousa, J.M.; Mendes, A. Development of a methodology to optimize the air bleed in PEMFC systems operating with low quality hydrogen. Int. J. Hydrogen Energy 2013, 38, 16286–16299. [Google Scholar] [CrossRef]
- Mahjoubi, C.; Olivier, J.-C.; Skander-Mustapha, S.; Machmoum, M.; Slama-Belkhodja, I. An improved thermal control of open cathode proton exchange membrane fuel cell. Int. J. Hydrogen Energy 2019, 44, 11332–11345. [Google Scholar] [CrossRef]
- Strahl, S.; Costa-Castelló, R. Temperature control of open-cathode PEM fuel cells. IFAC-PapersOnLine 2017, 50, 11088–11093. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.; Qin, Y.; Yin, Y.; Zhang, J.; Li, X. Humidification strategy for polymer electrolyte membrane fuel cells—A review. Appl. Energy 2018, 230, 643–662. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, J.; Chen, S.; Huang, L.; Shao, Z. Modeling and Control of Cathode Air Humidity for PEM Fuel Cell Systems. IFAC-PapersOnLine 2017, 50, 4751–4756. [Google Scholar] [CrossRef]
- Bizon, N.; Thounthong, P. Real-time strategies to optimize the fueling of the fuel cell hybrid power source: A review of issues, challenges and a new approach. Renew. Sustain. Energy Rev. 2018, 91, 1089–1102. [Google Scholar] [CrossRef]
- Ou, K.; Yuan, W.-W.; Choi, M.; Yang, S.; Kim, Y.-B. Performance increase for an open-cathode PEM fuel cell with humidity and temperature control. Int. J. Hydrogen Energy 2017, 42, 29852–29862. [Google Scholar] [CrossRef]
- Ahn, J.-W.; He, J.; Choe, S.-Y. Design of Air, Water, Temperature and Hydrogen Controls for a PEM Fuel Cell System. In Proceedings of the ASME 2011 9th International Conference on Fuel Cell Science, Engineering and Technology, Washington, DC, USA, 7–10 August 2011; pp. 711–718. Available online: https://asmedigitalcollection.asme.org/FUELCELL/proceedings-abstract/FUELCELL2011/54693/711/357956 (accessed on 9 February 2021).
- Bizon, N. Energy optimization of fuel cell system by using global extremum seeking algorithm. Appl. Energy 2017, 206, 458–474. [Google Scholar] [CrossRef]
- Sorlei, I.-S.; Bizon, N.; Thounthong, P.; Varlam, M.; Carcadea, E.; Culcer, M.; Iliescu, M.; Raceanu, M. Fuel Cell Electric Vehicles—A Brief Review of Current Topologies and Energy Management Strategies. Energies 2021, 14, 252. [Google Scholar] [CrossRef]
- Bizon, N.; Mazare, A.G.; Ionescu, L.M.; Enescu, F.M. Optimization of the proton exchange membrane fuel cell hybrid power system for residential buildings. Energy Convers. Manag. 2018, 163, 22–37. [Google Scholar] [CrossRef]
- Bizon, N. Nonlinear control of fuel cell hybrid power sources: Part II—Current control. Appl. Energy 2011, 88, 2574–2591. [Google Scholar] [CrossRef]
- Kaya, K.; Hames, Y. Two new control strategies: For hydrogen fuel saving and extend the life cycle in the hydrogen fuel cell vehicles. Int. J. Hydrogen Energy 2019, 44, 18967–18980. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, Z.; Chen, Z. Rule-based energy management strategy of a lithium-ion battery, supercapacitor and PEM fuel cell system. Energy Procedia 2019, 158, 2555–2560. [Google Scholar] [CrossRef]
- Li, G.; Zhang, J.; He, H. Battery SOC constraint comparison for predictive energy management of plug-in hybrid electric bus. Appl. Energy 2017, 194, 578–587. [Google Scholar] [CrossRef]
- Torreglosa, J.P.; Garcia, P.; Fernandez, L.M.; Jurado, F. Predictive Control for the Energy Management of a Fuel-Cell–Battery–Supercapacitor Tramway. IEEE Trans. Ind. Inform. 2014, 10, 276–285. [Google Scholar] [CrossRef]
- Li, Q.; Wang, T.; Dai, C.; Chen, W.; Ma, L. Power Management Strategy Based on Adaptive Droop Control for a Fuel Cell-Battery-Supercapacitor Hybrid Tramway. IEEE Trans. Veh. Technol. 2017, 67, 5658–5670. [Google Scholar] [CrossRef]
- Ameur, K.; Hadjaissa, A.; Cheikh, M.S.A.; Cheknane, A.; Essounbouli, N. Fuzzy energy management of hybrid renewable power system with the aim to extend component lifetime. Int. J. Energy Res. 2017, 41, 1867–1879. [Google Scholar] [CrossRef]
- Ahmadi, S.; Bathaee, S.; Hosseinpour, A.H. Improving fuel economy and performance of a fuel-cell hybrid electric vehicle (fuel-cell, battery, and ultra-capacitor) using optimized energy management strategy. Energy Convers. Manag. 2018, 160, 74–84. [Google Scholar] [CrossRef]
- Zhou, D.; Al-Durra, A.; Gao, F.; Ravey, A.; Matraji, I.; Simões, M.G. Online energy management strategy of fuel cell hybrid electric vehicles based on data fusion approach. J. Power Sources 2017, 366, 278–291. [Google Scholar] [CrossRef]
- Bizon, N.; Thounthong, P. Fuel economy using the global optimization of the Fuel Cell Hybrid Power Systems. Energy Convers. Manag. 2018, 173, 665–678. [Google Scholar] [CrossRef]
- Fares, D.; Chedid, R.; Panik, F.; Karaki, S.; Jabr, R. Dynamic programming technique for optimizing fuel cell hybrid vehicles. Int. J. Hydrogen Energy 2015, 40, 7777–7790. [Google Scholar] [CrossRef]
- Onori, S.; Tribioli, L. Adaptive Pontryagin’s Minimum Principle supervisory controller design for the plug-in hybrid GM Chevrolet Volt. Appl. Energy 2015, 147, 224–234. [Google Scholar] [CrossRef]
- Bizon, N.; Hoarcă, I.C. Hydrogen saving through optimized control of both fueling flows of the Fuel Cell Hybrid Power System under a variable load demand and an unknown renewable power profile. Energy Convers. Manag. 2019, 184, 1–14. [Google Scholar] [CrossRef]
- Ramos-Paja, C.A.; Bordons, C.; Romero, A.; Giral, R.; Martinez-Salamero, L. Minimum Fuel Consumption Strategy for PEM Fuel Cells. IEEE Trans. Ind. Electron. 2008, 56, 685–696. [Google Scholar] [CrossRef]
- Ou, K.; Yuan, W.-W.; Choi, M.; Yang, S.; Jung, S.; Kim, Y.-B. Optimized power management based on adaptive-PMP algorithm for a stationary PEM fuel cell/battery hybrid system. Int. J. Hydrogen Energy 2018, 43, 15433–15444. [Google Scholar] [CrossRef]
- Bizon, N. Real-time optimization strategies of Fuel Cell Hybrid Power Systems based on Load-following control: A new strategy, and a comparative study of topologies and fuel economy obtained. Appl. Energy 2019, 241, 444–460. [Google Scholar] [CrossRef]
- Wang, Y.-X.; Kai, O.; Kim, Y.-B. Power source protection method for hybrid polymer electrolyte membrane fuel cell/lithiumion battery system. Renew. Energy 2017, 111, 381–391. [Google Scholar] [CrossRef]
- Bizon, N. Fuel saving strategy using real-time switching of the fueling regulators in the proton exchange membrane fuel cell system. Appl. Energy 2019, 252, 113449. [Google Scholar] [CrossRef]
- Bizon, N.; Culcer, M.; Oproescu, M.; Iana, G.; Laurentiu, I.; Mazare, A.; Iliescu, M. Real-time strategy to optimize the airflow rate of fuel cell hybrid power source under variable load cycle. In Proceedings of the 2017 International Conference on Applied Electronics, Pilsen, Czech Republic, 5–7 September 2017. [Google Scholar]
- Bizon, N. Sensitivity analysis of the fuel economy strategy for a fuel cell hybrid power system using fuel optimization and load-following based on air control. Energy Convers. Manag. 2019, 199, 111946. [Google Scholar] [CrossRef]
- Bizon, N.; Stan, V.A.; Cormos, A.C. Stan Optimization of the Fuel Cell Renewable Hybrid Power System using the Control Mode of the Required Load Power on the DC Bus. Energies 2019, 12, 1889. [Google Scholar] [CrossRef] [Green Version]
- Bizon, N.; Mazare, A.G.; Ionescu, L.M.; Thounthong, P.; Kurt, E.; Oproescu, M.; Serban, G.; Lita, I. Better Fuel Economy by Optimizing Airflow of the Fuel Cell Hybrid Power Systems Using Fuel Flow-Based Load-Following Control. Energies 2019, 12, 2792. [Google Scholar] [CrossRef] [Green Version]
- Bizon, N. Efficient fuel economy strategies for the Fuel Cell Hybrid Power Systems under variable renewable/load power profile. Appl. Energy 2019, 251, 113400. [Google Scholar] [CrossRef]
- Bizon, N. Sensitivity analysis of the fuel economy strategy based on load-following control of the fuel cell hybrid power system. Energy Convers. Manag. 2019, 199, 111946. [Google Scholar] [CrossRef]
- SimPowerSystems; Hydro-Québec and the MathWorks, Inc.: Natick, MA, USA, 2010; Available online: http://www.hydroquebec.com/innovation/en/pdf/2010G080-04A-SPS.pdf (accessed on 9 February 2021).
- Ettihir, K.; Boulon, L.; Agbossou, K. Optimization-based energy management strategy for a fuel cell/battery hybrid power system. Appl. Energy 2016, 163, 142–153. [Google Scholar] [CrossRef]
- Bizon, N.; Kurt, E. Performance analysis of the tracking of the global extreme on multimodal patterns using the Asymptotic Perturbed Extremum Seeking Control scheme. Int. J. Hydrogen Energy 2017, 42, 17645–17654. [Google Scholar] [CrossRef]
- Bizon, N.; Thounthong, P.; Raducu, M.; Constantinescu, L.M. Designing and modelling of the asymptotic perturbed extremum seeking control scheme for tracking the global extreme. Int. J. Hydrogen Energy 2017, 42, 17632–17644. [Google Scholar] [CrossRef]
- Wu, J.; Wei, Z.; Li, W.; Wang, Y.; Li, Y.; Sauer, D. Battery Thermal- and Health-Constrained Energy Management for Hybrid Electric Bus based on Soft Actor-Critic DRL Algorithm. IEEE Trans. Ind. Inform. 2021, 1. [Google Scholar] [CrossRef]
- Wu, J.; Wei, Z.; Liu, K.; Quan, Z.; Li, Y. Battery-Involved Energy Management for Hybrid Electric Bus Based on Expert-Assistance Deep Deterministic Policy Gradient Algorithm. IEEE Trans. Veh. Technol. 2020, 69, 12786–12796. [Google Scholar] [CrossRef]
- Wei, Z.; He, H.; Pou, J.; Tsui, K.-L.; Quan, Z.; Li, Y. Signal-Disturbance Interfacing Elimination for Unbiased Model Parameter Identification of Lithium-Ion Battery. IEEE Trans. Ind. Inform. 2020, 1. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, J.; He, H.; Ding, G.; Cui, H.; Liu, L. Future smart battery and management: Advanced sensing from external to embedded multi-dimensional measurement. J. Power Sources 2021, 489, 229462. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pload | FuelT(sFF) | FuelT(SW) | ∆FuelT(SW) | ∆FuelT(Air) | ∆FuelT(Fuel) |
|---|---|---|---|---|---|
| [kW] | [L] | [L] | [L] | [L] | [L] |
| 2 | 34.02 | 33.56 | −0.46 | 11.26 | −0.46 |
| 3 | 56.3 | 55.08 | −1.22 | 4.14 | −1.22 |
| 4 | 74.88 | 72.6 | −2.28 | 2.08 | −2.28 |
| 5 | 98.6 | 93 | −5.6 | −0.08 | −5.6 |
| 6 | 125.58 | 123.3 | −2.28 | −2.28 | −7.66 |
| 7 | 158.34 | 146.18 | −12.16 | −12.16 | −13.56 |
| 8 | 176 | 147.52 | −28.48 | −28.48 | −22.92 |
| Pload | FuelT(sFF) | FuelT(SW) | ∆FuelT(SW) | ∆FuelT(Air) | ∆FuelT(Fuel) |
|---|---|---|---|---|---|
| [kW] | [L] | [L] | [L] | [L] | [L] |
| 2 | 34.02 | 33.376 | −0.644 | 12.14 | −0.644 |
| 3 | 56.3 | 52.424 | −3.876 | 5.548 | −3.876 |
| 4 | 74.88 | 69.704 | −5.176 | 1.2 | −5.176 |
| 5 | 98.6 | 89.84 | −8.76 | −6.44 | −8.76 |
| 6 | 125.58 | 111.44 | −14.14 | −14.14 | −12.54 |
| 7 | 158.34 | 129.92 | −28.42 | −28.42 | −24.26 |
| 8 | 176 | 144.92 | −31.08 | −31.08 | −26 |
| Pload | FuelT(sFF) | FuelT(SW) | ∆FuelT(SW) | ∆FuelT(Air) | ∆FuelT(Fuel) |
|---|---|---|---|---|---|
| [kW] | [L] | [L] | [L] | [L] | [L] |
| 2 | 34.02 | 33.92 | −0.1 | 7.628 | −0.1 |
| 3 | 56.3 | 52.6 | −3.7 | 2.764 | −3.7 |
| 4 | 74.88 | 69.616 | −5.264 | 0.288 | −5.264 |
| 5 | 98.6 | 89.84 | −8.76 | −5.8 | −8.76 |
| 6 | 125.58 | 112.56 | −13.02 | −13.02 | −13.98 |
| 7 | 158.34 | 133.52 | −24.82 | −24.82 | −20.74 |
| 8 | 176 | 146.2 | −29.8 | −29.8 | −25 |
| Pload(AV) | FuelT(sFF) | FuelT(SW) | ∆FuelT(SW) | ∆FuelT(Air) | ∆FuelT(Fuel) |
|---|---|---|---|---|---|
| [kW] | [L] | [L] | [L] | [L] | [L] |
| 2 | 34.14 | 36.06 | 1.92 | 7.18 | 1.92 |
| 3 | 53.92 | 54.74 | 0.82 | 6.24 | 0.82 |
| 4 | 75.8 | 75.49 | −0.31 | 3.32 | −0.64 |
| 5 | 100.62 | 96.8 | −3.82 | −3.16 | −4.16 |
| 6 | 130.2 | 116.92 | −13.28 | −13.28 | −10.08 |
| Pload(pulse) | FuelT(sFF) | FuelT(SW) | ∆FuelT(SW) | ∆FuelT(Air) | ∆FuelT(Fuel) |
|---|---|---|---|---|---|
| [kW] | [L] | [L] | [L] | [L] | [L] |
| 3/7 kW | 105.9 | 78.91 | −26.99 | −18.15 | −11.32 |
| Pref | FuelT(sFF) | FuelT(SW) | ∆FuelT(SW) | ∆FuelT(Air) | ∆FuelT(Fuel) | ∆FuelT(SW) [110] |
|---|---|---|---|---|---|---|
| [kW] | [L] | [L] | [L] | [L] | [L] | [l] |
| 2.5 | 286.5 | 268.6 | −17.9 | −17.4 | −15.7 | −19.4 |
| 3.5 | 286.5 | 258.8 | −27.7 | −17.4 | −15.7 | −28.7 |
| 4.5 | 286.5 | 250.4 | −36.1 | −17.4 | −15.7 | −35.2 |
| 5.5 | 286.5 | 247.6 | −38.9 | −17.4 | −15.7 | −39.3 |
| 6.5 | 286.5 | 252 | −34.5 | −17.4 | −15.7 | −33.7 |
| Strategy | Fuel-LFW | Air-LFW | SW-LFW | SW [110] | Pload [kW] | |
|---|---|---|---|---|---|---|
| Parameter [unit] | ||||||
| [%] | 1.89 | −35.68 | 1.89 | 1.65 | 2 | |
| 6.88 | −9.85 | 6.88 | 3.55 | 3 | ||
| 6.91 | −1.60 | 6.91 | 5.02 | 4 | ||
| 8.88 | 6.53 | 8.88 | 11.58 | 5 | ||
| 9.99 | 11.26 | 11.26 | 14.19 | 6 | ||
| 15.32 | 17.95 | 17.95 | 19.10 | 7 | ||
| 14.77 | 17.66 | 17.66 | 27.11 | 8 | ||
| [%] | 8.08 | 0.78 | 8.93 | 10.28 | ||
| Strategy | Fuel-LFW | Air-LFW | SW-LFW | SW [110] | Pload(AV) [kW] | |
|---|---|---|---|---|---|---|
| Parameter [unit] | ||||||
| [%] | −5.62 | −21.03 | −5.62 | 0.29 | 2 | |
| −1.52 | −11.57 | −1.52 | 1.93 | 3 | ||
| 0.84 | −4.38 | 0.41 | 4.09 | 4 | ||
| 4.13 | 3.14 | 3.80 | 11.33 | 5 | ||
| 7.74 | 10.20 | 10.20 | 32.67 | 6 | ||
| [%] | 0.93 | −3.94 | 1.21 | 8.39 | ||
| Strategy | Fuel-LFW | Air-LFW | SW-LFW | SW [110] | Pload(AV) [kW] | |
|---|---|---|---|---|---|---|
| Parameter [unit] | ||||||
| [%] | 10.69 | 17.14 | 25.49 | 25.87 | 5 | |
| Strategy | Fuel-LFW | Air-LFW | SW-LFW | SW [110] | Pload(AV) [kW] | |
|---|---|---|---|---|---|---|
| Parameter [unit] | ||||||
| [%] | 5.48 | 6.07 | 12.60 | 12.29 | 5 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bizon, N.; Thounthong, P. A Simple and Safe Strategy for Improving the Fuel Economy of a Fuel Cell Vehicle. Mathematics 2021, 9, 604. https://doi.org/10.3390/math9060604
Bizon N, Thounthong P. A Simple and Safe Strategy for Improving the Fuel Economy of a Fuel Cell Vehicle. Mathematics. 2021; 9(6):604. https://doi.org/10.3390/math9060604
Chicago/Turabian StyleBizon, Nicu, and Phatiphat Thounthong. 2021. "A Simple and Safe Strategy for Improving the Fuel Economy of a Fuel Cell Vehicle" Mathematics 9, no. 6: 604. https://doi.org/10.3390/math9060604
APA StyleBizon, N., & Thounthong, P. (2021). A Simple and Safe Strategy for Improving the Fuel Economy of a Fuel Cell Vehicle. Mathematics, 9(6), 604. https://doi.org/10.3390/math9060604