Abstract
The article brings a brief revision of the two-degree-of-freedom (2-DoF) internal model control (IMC) and the 2-DoF Smith-Predictor-based (SP) control of unstable systems. It shows that the first important reason for distinguishing between these approaches is the limitations of the control action. However, it also reminds that, in addition to the seemingly lucrative dynamics of transients, the proposed approaches can conceal a tricky behavior with a structural instability, which may manifest itself only after a longer period of time. Instead, as one of possible reliable alternatives, two-step IMC and filtered Smith predictor (FSP) design are applied to unstable first-order time-delayed (UFOTD) systems. Firstly, the 2-DoF P controller yielding a double real dominant closed loop pole is applied. Only then the 2-DoF IMC or FSP controllers are designed, providing slightly slower, but more robust transients. These remain stable even in the long run, while also showing increased robustness.
1. Introduction
First-order time-delayed (FOTD) systems with input , output , time delay , gain and pole
are the most commonly used models in control design [1]. Index “1” stands for first-order systems. Later on we will also deal with control of higher order systems with the integer index .
Notation (1) is especially suitable when dealing with stable, integrating and unstable systems at the same time, which affects only the parameter a. Namely, represents integrating processes, while represents unstable FOTD (UFOTD) systems, which are (mainly in connection with longer delays) an area of intensive research for several decades. This is, for example, well evidenced by the wide spectrum of control approaches based on model (1) ranging from traditional (one-degree-of-freedom, 1-DoF) PID [2], two-degrees-of-freedom (2-DoF) PI and PID [3,4,5] or different variations of the so called dead-time compensators (DTCs) [6,7,8,9,10,11,12]. The number of different approaches to time-delayed systems is constantly growing [13,14,15,16,17,18]. However, some of the existing approaches also employ debatable solutions, which require more consistent and rigorous use of reliable mathematical methods, rigorous definitions and procedures.
As an illustrative example of the inconsistent use of mathematics, we will firstly discuss an application of a filtered Smith predictor [19] to control the UFOTD systems (1). Thereby, to stress the differences among the considered plant and its model, where relevant, the overlined symbols will be used in the plant model (2):
After we show that when controlling UFOTD systems using SP, even a stabilised disturbance response does not guarantee the stability of transients; we show another way to use derived SP structures. In contrast to [20], where stability of the loop with disturbance reconstruction and compensation was guaranteed by the superior structure of the stabilising controller, we will now show the reversed approach. With the stabilising P controller, we first guarantee the stability of the controlled system. Then we can use the methodology of SP design for the case of stable systems.
The rest of the paper is structured as follows. Section 2 deals with typical features of the 2-DoF IMC and 2-DoF SP design, whereby the main ideas are illustrated for delay-free first order plants with . In Section 3, they are then also developed with regard to control of UFOTD systems with . The two-stage controller design for UFOTD systems, which first assumes system stabilisation using a 2-DoF P controller and in the second step applies the SP design for stable higher order systems, is analysed in Section 4. The main paper results are then illustrated in Section 5 by simulation and discussed in Section 6. Section 6 summarises the basic results of the article and outlines possible directions for their further development.
2. Setpoint Feedforward with Compensation of Output Disturbances by IMC
Next we will show how the control of UFOTD systems can be transformed into the control of stable systems of the jth order.
The basic idea of the internal model control (IMC) designed for the jth order system is a combination of setpoint feedforward control with reconstruction of the output disturbance by the parallel plant model and its compensation by means of a negative disturbance feedback applied to the reference setpoint signal w (Figure 1). By replacing simple negative feedback from with (typical for 1-DoF IMC) by a more complex disturbance feedforward , we get the so called 2-DoF IMC.
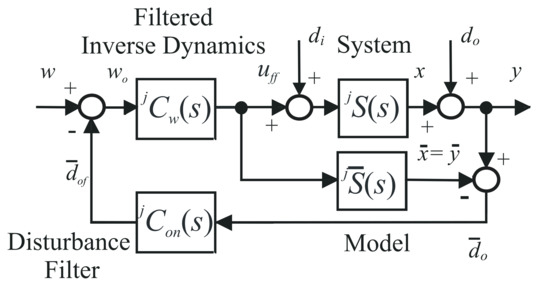
Figure 1.
2-DoF IMC design for the stabilised j-th order plant model.
Since the control of time-delayed unstable systems brings several problems, in the following, in order to simplify the explanation as in [20], we first deal with the control of simpler first-order systems without transport delay, i.e., with . Because this simplified analysis is limited to the control of 1st order systems, the index j will be omitted in the following subsections.
2.1. Two Ways of the Setpoint Feedforward Implementation for First-Order Delay-Free Plants
A practical application of the setpoint feedforward usually demands a low-pass filter combined with inversion of the delay-free part of the plant model expressed by the feedforward transfer function
In (3) represents a time constant of the resulting setpoint tracking transfer function
which is determining speed of the transients. Choice of in (4) should guarantee admissible and realisable amplitudes of the setpoint control signal .
The second way of accomplishing the setpoint feedforward uses a feedback from output of the plant model (see the gray area in Figure 2). To get a dynamics equivalent to (3) and (4), the 2-DoF pole-assignment proportional (P) control with the pole given by equations
will be used, yielding for the setpoint-to-control behavior (3)
where
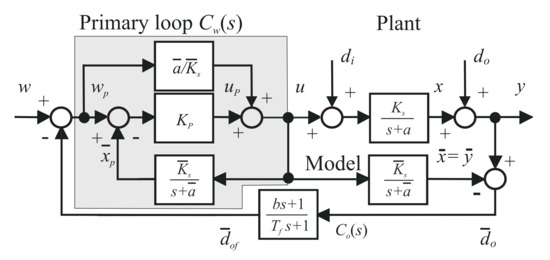
Figure 2.
2-DoF IMC control of the first-order plants (1) based on the model (2) with and a setpoint feedforward generated either by a single transfer function (TF-IMC) or by the primary loop (PL-IMC) with 2-DoF P control of the plant model ; both augmented by a disturbance feedforward considering in (9).
It means that this “primary loop” generates the feedforward . The loop with (5) and (7) will be stable for (), which corresponds to
Thereby, for stable and integrating plants with the stability condition (8) nominally holds for any . For unstable plants the product may not decrease below the value .
Both these implementation methods also apply to circuits augmenting the setpoint feedforward with reconstruction and compensation of output disturbances (Figure 2). Such control schemes have been broadly investigated within the internal model control (IMC) [21].
Definition 1
(TF-IMC and PL-IMC). The setpoint feedforward implemented with a single transfer function (TF) will be denoted as TF-IMC. The implementation with a primary loop (PL) will be denoted as PL-IMC.
Both TF-IMC and PL-IMC can be proposed as 1-DOF and 2-DoF structures. We will later show that in time-delayed systems, the PL-IMC will correspond to a structure also known as the Smith predictor.
Remark 1
(When and why TF-IMC, or PL-IMC?). Because these two options for generating the setpoint feedforward are crucial to understanding the dead time compensator denoted as Smith predictor (SP) [22], attention should be paid firstly to the question of when they differ and what their advantages are, from which the application areas then emerge. Furthermore, although the PL-IMC implementation represents a typical SP structure used for dead time compensation, [20] points out an unexpected and mostly unnoticed Property 1.
Property 1
(Application area of PL-IMC). As shown in [20], attractiveness of PL-IMC feedforward implementation is not tied to the transport delay itself but to the limitations of the control signal. Taking into account the control saturation block using feedback allows faster transients that correspond to the use of TF-IMC
Property 2
(PL-IMC still includes parallel unstable blocks). Implementation according to Figure 2 illustrates the possibility of a simple replacement of the primary loop (considering control of the delay-free plant model with ) by a feedforward transfer function . In this way it is further possible to spare the parallel plant model used in reconstruction by replacing the signal by the signal of the model output used in the primary loop for feedforward generation. However, even after such simplification, the control action u is still used to stabilise two unstable systems (the plant and its delay-free model embedded in the (stabilised) primary loop). Since a single control action u cannot stabilise two unstable, even if identical, systems (with possibly diverging states), the structure must be internally unstable. Use of is not able to eliminate this problem and the only possibility is to eliminate the unstable model (and with it also the reconstructed output disturbance ) from the structure.
Property 3
(Elimination of the plant pole from the input disturbance response). Some useful properties may be achieved by elimination of the plant pole from the input disturbance response by the feedback controller (e.g., in control of systems with a slow open-loop response), which does not influence dynamics in the feedforward path [19,20]. However, use of such a (9) is still not enough to guarantee stability of unstable plant control.
To accomplish the Property 3, the output disturbance feedforward may be taken in a form of a filtered PD control
Theorem 1
(Tuning of the disturbance feedforward ). To eliminate the plant pole from the input disturbance response of an FOTD plant, the parameter β of the disturbance feedforward (9) has to be chosen as
or
Proof.
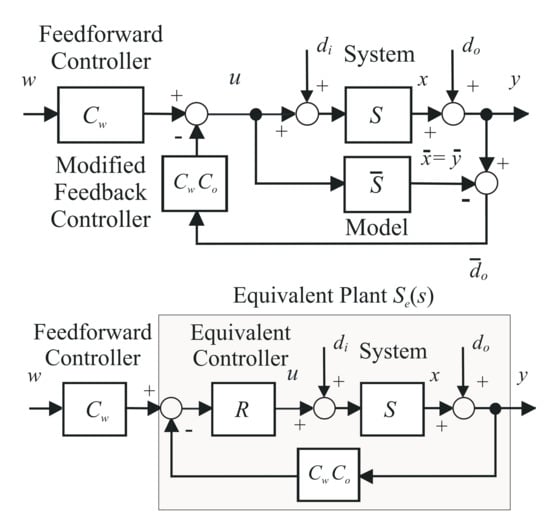
For the sake of simplicity, let . With the simplified denotation, the loop from Figure 1 will first be split into feedforward and the rest denoted as equivalent plant (Figure 3 above). In simplifying its structure it is possible to introduce an equivalent controller
Figure 3.
Interpretation of the disturbance feedforward impact in 2-DoF IMC transformed to a feedforward control of an equivalent plant . Modification of Figure 1 by moving block before summation point (above); replacement of internal feedback with blocks and by controller R (below).
In the nominal case with , in (13) is determined to cancel the plant pole from the disturbance response transfer function
For and it may be guaranteed by (14) fulfilling
which yields (10) and the disturbance responses (16)
Obviously, the plant pole disappeared from the denominator of .
For integrating systems with , (11) has to guarantee a double zero of at . □
However, as may be shown by sufficiently long simulation (similarly as in [20]), the transients will still be unstable. For integrating systems with , there exists one significant reason for not using the output disturbances reconstruction: the output disturbance are unobservable. In such a case, the controller design has to be completely modified—the unobservable disturbance estimate signal has to disappear from the controller structure. Next, we will clarify the whole problem also for .
2.2. 2-DoF PL-IMC: Impact of the Stabilising Feedback on the Loop Behavior
To summarise, with respect to Property 1, to control stable first order plants with long time constants we have to use PL-IMC with the tuning (10) and (11). However, as we will show below, in the case of unstable systems, this is still not enough to achieve stable transients. Similarly as in disturbance-observer-based control (see e.g., [20,23]), the disturbance feedforward makes the controlled plant to behave as the nominal model . For stable systems, it may be used to optimise performance of the feedforward control against the model uncertainty and external disturbances. The problem, however, is that unstable systems cannot be controlled using open-loop setpoint feedforward, even if we know their model relatively accurately.
To show the lingering reasons for instability, the 2-DoF IMC structure from Figure 1 will firstly be transformed into a series combination of the feedforward controller and of an equivalent plant (Figure 3 above). This may yet be simplified by introducing an equivalent controller (12) (Figure 3 below), which yields the equivalent plant dynamics
Theorem 2
Proof.
The proof is nearly a repetition of the proof of Theorem 1 in [20] and deals just with the limit values of in (17).
For relatively low frequencies, if , , and . This means that the input disturbances at low frequencies have no effect on the process output. At the same time, the feedforward term (designed for model ) cancels the unstable plant pole. Therefore, the setpoint tracking seems to be achieved accurately. However, such a control structure cannot remain stable for a long time. Indeed, the control term with the unstable cannot guarantee stability. Any mismatch between the actual and the modelled plant or the process disturbance would trigger closed loop instability.
The mentioned mismatch is particularly pronounced at higher frequencies when, for , . Then both as well as . Now, since , the unstable plant pole cannot be completely eliminated by the term . This leads to a divergence of the plant output and to instability of the control loop. □
Remark 2
(Asymmetry of disturbance compensation in stable and unstable systems). As an addendum to Remark 4 in [20], it is again to note that the asymmetry in disturbance compensation of stable and unstable plants, which has been formulated for the case of input disturbance compensation, applies universally also to structures based primarily on output disturbances. It leads to conflicting requirements, when with regard to the stability of the state it is not possible to impose the dynamics of an unstable model but with respect to the aptness of the model we get the best short term results with unstable model close to controlled dynamics . It also led to the mistake that the stability of disturbance responses was considered to be sufficient for the stability of the system state, but this is not the case.
2.3. Cascade SL-IMC Design Based on Stabilised Plants
As we have just shown, even 2DOF IMC does not eliminate the disadvantage of 1DOF IMC, namely the impossibility of direct use for integral and unstable systems ().
Another application of 2-DoF P control is encountered in the case of cascaded structure according to Figure 4. It avoids disadvantages of 2DOF IMC and brings a whole new functionality to the structure. For , stabilisation of the first order system (1) by 2-DoF P control (5) with the time constant (7) gives nominally the transfer function of the stabilised loop (SL) (4).
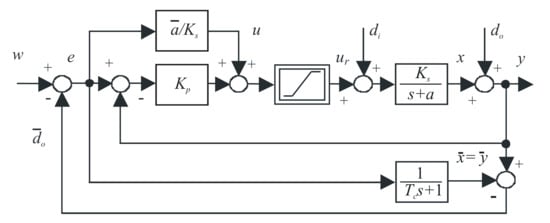
Figure 4.
Cascade SL-IMC with the first order plant stabilisation by 2-DoF P control ().
Definition 2
SL-IMC not only has a simple structure (simpler than 2DoF-IMC in Figure 2), a simple derivation and descriptive relationships (the setpoint response (4) and the disturbance response (18)), but it also avoids the disturbance feedforward (9) with a derivative action. This is all while eliminating instability in the control of unstable systems and enabling measurement of acting disturbances. Although SL-IMC is based on the reconstruction and compensation of output disturbance, it can also be used for the reconstruction of input disturbance. It may easily be calculated that in a steady state with and , the value of input disturbance must fulfil the condition , which yields an estimate
3. Model Based Feedforward Control Design for UFOTD Plants
Let us now again consider UFOTD system (1) with . After specifying the closed loop transfer functions , the necessary control algorithms can be designed, either in the form of the proportional-integrative-derivative (PID) controllers [2] or various dead-time compensators (DTCs). By DTC, the solution with an explicit model of the plant including the transport delay in the control structure are taken into account [19]. Due to problems related to dead-time modelling by analogue circuitry, the first DTCs appeared relatively late, just in the second half of the 1950s [22,24].
One of the DTCs, known as Smith predictor (SP), significantly influenced developments of DTCs to date. Its broader use was conditioned mainly by the development of discrete models, which are far more appropriate for delayed systems. In this paper, in order to simplify the derivations, the continuous-time domain, with sampling period significantly smaller compared to the process dominant time constants, will be used.
In early publications such as [25,26,27,28] the unstable plant has been stabilised by a controller placed between the control error and the process input. In contrast to this, SP and its later appearing modifications, as filtered Smith predictor (FSP), do not consider plant stabilisation. Instead, they introduced the disturbance response stabilisation via the disturbance rejection channels but without paying attention to the plant state stabilisation.
In order to bring everything to the right level and to be specific, SP will be interpreted here according to the following definitions.
Definition 3
(Smith Predictor (SP)). Traditional SP represents a PL-IMC implementation of feedforward control extended by an output disturbance reconstruction and compensation.
The given definition brings severe structural restrictions. Since the proposed SP structure represents a series combination of a feedforward controller (producing a filtered plant dynamics inversion) and the considered plant model (1), with respect to Theorem 2, SP is only suitable for controlling stable systems. Many works proclaim that in the form of 2-DoF PL-IMC structure and after being augmented by a suitable stabilisation filter to the reconstructed disturbance (denoted as in Figure 2, or in Figure 5 [19]), unstable poles of the system can be eliminated from the transfer function of the input disturbance. (Such a 2-DoF PL-IMC structure is denoted as a (conceptual) filtered Smith predictor (FSP).) However, a stable response to disturbances does not stabilise the state of unstable controlled systems.
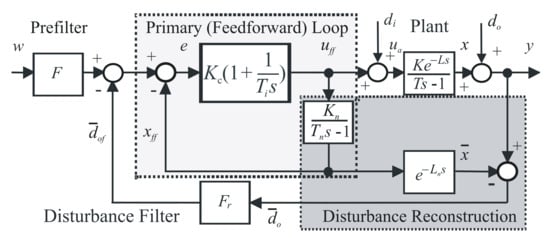
Figure 5.
FSP structure for analysis according to [19] with PI controller in the setpoint feedforward loop, prefilter F and output disturbance feedforward filter from the reconstructed output disturbance for UFOTD.
Since the correct understanding of the SP role is crucial for understanding remaining of this paper, we may start with noting its different interpretations from references. They are denoting its role as elimination of the dead-time from the closed loop characteristic polynomial [29,30] or prediction of the actual system output from its time-delayed measurement [29,31]. Here one asks how far they may be generalised to cover more general context, for example, control of UFOTD plants.
In the following, we will show that SP is only one of the modifications of the disturbance observer, which in the low frequency range modifies the controlled system to the dynamics selected by the nominal model [23]. Then, it is impossible for the closed loop including the unstable model mode to remain stable. The unsuitability of the conceptual FSPs for unstable systems stems entirely from the characteristics of the disturbance observers expressed by the following hypothesis.
Theorem 3
(Role of the SP). Suppose that, according to Definition 3, SP represents a setpoint feedforward with output disturbance reconstruction and compensation. Then, as all the disturbance observer based solutions [23], it has the task of forcing the controlled system to the dynamics given by the selected (nominal) model even in the presence of uncertainties and acting disturbances. Its feedback keeps the total disturbance related to the output (or input) of the selected model at zero at least in the low frequency region. However, if it tries to maintain the nominal dynamics of an unstable model, it must result in the instability of the whole circuit.
Based on long-standing interpretations, it could be argued that the original SP does not act like this. It only “controls” the undelayed part of the process by using an appropriate controller (as, e.g., the PI controller in Figure 5). However, the role of this controller is very often interpreted incorrectly. For example, when considering the opinion-forming textbook in the field of PID control [32], the feedforward control and the Smith predictor are discussed in two completely independent chapters, without mentioning existence of some relationships. In other words, these two problems are not generally known as related each other. In numerous works on FSP (as, e.g., [19,33]) you will not find the term “feedforward”. Thus, the SP interpretation expressed in above Theorem and Definition 3 denoting SP as “setpoint feedforward+output disturbance rejection” may for numerous readers represent a new information which deserves a deeper attention. Correct interpretation is especially important in the case of unstable systems.
By forcing the controlled system to the dynamics given by the selected (nominal) model even in the presence of uncertainties and acting disturbances, under ideal conditions and for limited periods of time, the transfer functions based conceptual FSP design may give excellent results. Nevertheless, it is certain that the functionality of the loop will be degraded due to the unstable mode.In this respect, the FSP application to control of unstable FOTDs (UFOTDs) can be considered as faulty design, similar to the one in the Chernobyl power plant.
3.1. Example: Concentration Control of an Unstable Reactor by FSP
Main drawbacks of the FSP structure for application, presented in [19], will be illustrated on a model of the unstable chemical reactor, according to Figure 5. The dynamics of some chemical reactors with non-ideal mixing has been approximated by the following UFOTD transfer function (see [19])
The primary loop controller for generating the setpoint feedforward control signal (Figure 5) was
Use of PI controller in the primary loop made the task complex. It required introducing a prefilter to cancel the zero of , appearing also in the primary loop transfer function, by the prefilter denominator
and the disturbance feedforward filter was the following
Since not all the parameters of simulations were specified in the initial work [19], we tried to estimate them from the given time responses ( step amplitude was specified as and initial output value was simply set to ). Thereby, for the setpoint and disturbance feedforward filters (22) and (23), the time constants equal to the nominal dead time value , have been chosen.
The transients in Figure 6 fully demonstrate the consequences of the Theorem 2, when the apparently perfect transients are ultimately devalued by internal instability caused by an unbounded increase in the reconstructed disturbance and the unstable plant mode. The primary loop with the controller (21) and delay-free plant model (20) may be namely replaced by the IMC-like feedforward controller with the transfer function
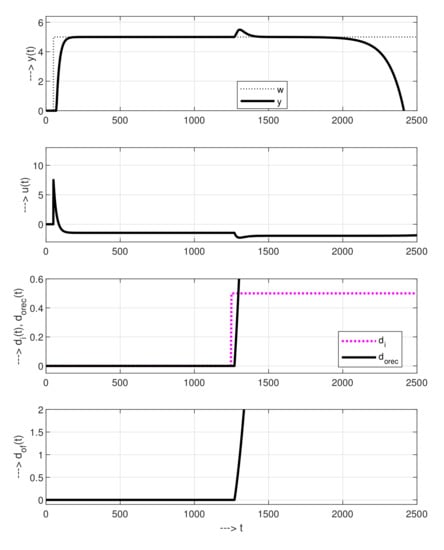
Figure 6.
Transient responses corresponding to the FSP controller from Figure 5 according to [19] and demonstrating internal instability due to unbounded reconstructed disturbance signals and .
Multiplication with the prefilter (22) then yields the effective feedforward
representing a filtered inversion of the delay-free plant model (20).
The loop may further be simplified by introducing equivalent controller
which then yields the input disturbance response
Thereby, the parameter of is designed so as to remove the unstable plant pole from the input disturbance transfer function (28). Such a plant pole independent response (29) corresponds to
All this relatively complex setting, in which the unexplained constant appears in the article, is a tax for unnecessary use of the PI controller in the primary loop. This will be compounded by problems typically occurring mainly in controlled integrative and unstable systems associated with the limitation of the action variable and the need to compensate for the windup effect [34,35].
3.2. FSP: Structure for Analysis Versus Structure for Implementation
Thus, as already mentioned, FSP [10,19,36,37] represent one of numerous modifications of the SP introduced originally in [22]. For more than half a century the mainstream SP interpretation has been proclaimed as an enhancement of the PI control by removing the transport delay from the characteristic closed-loop quasipolynomial. Only some alternative works [35,38,39,40,41,42] mentioned that the primary SP loop is used for generating the setpoint feedforward by inversion of the plant dynamics. In this respect the integral action of the PI control is unnecessary (even harmful) and for the first-order plants it has been proposed to be replaced by 2-DoF P controller. This has unified and simplified SP primary loop setup for all stable, unstable and integrating systems and eliminated the problem of excessive integration in the control of constrained systems. The above conclusions were adopted by some works [33,43,44,45,46] after the original paper. However, except for the last contribution, the mentioned works did not cite the original work and they forgot to provide a detailed justification for this change in their work. Moreover, the mentioned works did not explain the advantages of the proposed schemes over the PI controller in the main control loop.
However, in control of UFOTD plants numerous publications still present much more serious defects than the PI in the feedforward generation.
As demonstrated by Figure 6, the stable disturbance response is not a sufficient but only a necessary condition for the loop stability. From this point of view, Theorem 3 also plays an important role in the case of unstable systems. Therefore, initially, shapes of the transients at the plant input and output in Figure 6 may seem to show very nice dynamics and fully confirm results of [19]. However, due to Theorem 2, the choice of an unstable nominal model cannot ensure the long-term stability of the circuit, even if the response to disturbances is stable. It is leading to an unconstrained grow of reconstructed disturbance signals and output instability (as demonstrated in Figure 6 for by an output decrease). Unstable plant modes are necessarily initiated, even in a circuit without external disturbances, by imperfections of numerical integration and a plant-model mismatch. Hence, regardless of the simulation parameters and the chosen integration methods, the close-loop response would eventually become unstable.
In each case, the above transients fully confirm that application of the FSP “for analysis” structure to UFOTD systems, according to [19], represents a conceptual mistake. At the same time, however, it shows the limits of achievable performance, which we would like to address together with long-term stability and robustness.
Aware of the stability problem, but without a proper explanation of the necessary details, the authors then introduce the term FSP “implementation structure” in [19]. The essence of the implemented modifications (see Figure 7 below) can be described as the elimination of unbounded and in the case of integrative plants also unobservable reconstructed disturbance signals. This is achieved by including the inner loop of the circuit according to Figure 7 above in the equivalent controller in Figure 7 below. The slightly different structure given in [19] is (without further explanation) also suitable for circuits with a limited action variable. However, in view of these differences, it should be noted that if we define SP as a setpoint feedforward extended by disturbance reconstruction and compensation, the modified structure contains neither setpoint feedforward nor disturbance reconstruction and compensation. Based on this, the name FSP can be considered misleading and it would be far more appropriate to call it “SP inspired solution” [42]. In the following, we will therefore focus on solutions that achieve the internal stability while ensuring the original functionality of the SP. It will still be possible to distinguish a feedforward setpoint and have a reconstructed input disturbance signal available.
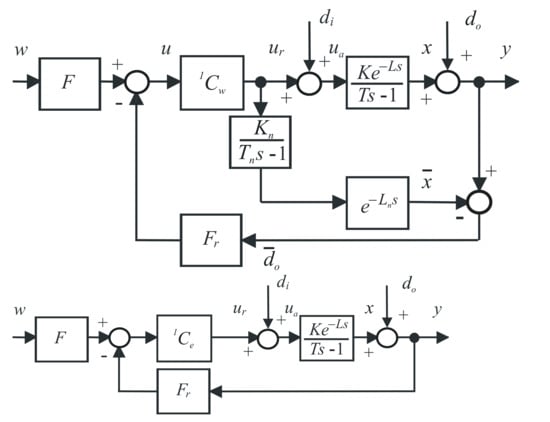
Figure 7.
IMC-like structure of the internally unstable FSP controller scheme “for analysis” from Figure 5, with feedforward controller (24), prefilter (22) and disturbance feedforward filter (23) of the reconstructed output disturbance for UFOTD according to [19] (above) and the structure “for implementation” after eliminating the unbounded reconstructed disturbance and introducing an equivalent controller (26) corresponding to the feedforward with the internal feedback blocks and the nominal plant model (20) (below).
4. Main Results: Two-Step FSP Design by Stabilisation of UFOTD Plants
Remark 3.
Let us first briefly recall that it makes sense to distinguish between the TF-IMC and PL-IMC control only if we want to take into account situations with unrestricted, resp. with limited control signal. Thereby, PL-IMC control is the equivalent of SP for stable time-delayed systems. Only SL-IMC may be directly applied to integral and unstable systems. Therefore, we further develop this structure for the case of UFOTD systems.
The unsuitability of unstable nominal dynamics in the design of the SP is far from new. In such a case, e.g., dePaor [47] preferred to choose a stable model, although the large plant-model mismatch led to a deterioration of the control performance and significantly limited dynamic properties of the circuit.
Other possible solutions include preliminary stabilisation of the controlled system, which allows the application of SP or other design methods (see e.g., [47,48,49,50,51,52,53] and the references therein) or an additional design of a superior stabilisation solution for FSP (as in [20]), which may then be applied directly to an unstable system. Below we address the first of these options yielding broadly applicable analytical controller tuning.
4.1. UFOTD Plant Stabilisation by 2-DoF P Control
In order to simplify further derivations with both stable and unstable processes, the original FOTD systems described by (1) will be used in combination with the 2-DoF proportional (P) control with the gain (Figure 8). In the nominal case with , and , it leads to the following closed loop transfer functions:
Figure 8.
Stabilisation of UFOTD plant model by 2-DoF P controller.
All these transfer functions (30) have the characteristic quasipolynomial with infinitely many roots:
As the limit case of the controller gains not yet exhibiting oscillations, (31) has to include a double real dominant pole [20]:
If are dominant poles, the remaining roots of (32), which are left and sufficiently far from in the complex plane, may be neglected. Thereby, as a double pole, has to fulfil equations and written as:
From (34)
substituted into (33) follows that the double dominant pole and the corresponding dominant primary loop time constant are:
The closed-loop system is stable, when the dominant pole (35) fulfils
In other words, with respect to (37), the unstable processes with cannot be stabilised by P control. For , the value of increases compared to the integrative plants with , which makes it especially difficult to eliminate disturbances, when for
It follows from (38) that for , the transient rate in the stabilisation loop decreases.
Remark 4
(Impact and reconstruction of disturbances acting under P control). The following facts are important for disturbance reconstruction and compensation:
- From the disturbance transfer functions and (30) follows that the acting constant disturbances have non-zero effect on the output variable in steady states. Thus, an appropriate disturbance reconstruction and compensation have to be considered;
- In the 2-DoF PL-IMC implementation with 2-DoF P control according to Figure 2 applied to stabilise the plant, in steady states, the reconstructed input disturbance signal required to eliminate the input disturbance (see the derivation of (19)) may be calculated from the reconstructed filtered output disturbance according to
4.2. 1-DoF and 2-DoF SL-IMC Design Based on the TF-IMC with 2nd-Order SL Approximation
Since for the transfer function of the stabilised loop does not depend on the pole of the system, the scheme according to Figure 4 suffices to be considered with 1-DoF. Since the closed loop in Figure 8 with a stabilising P controller (36) and the FOTD plant (1) has a double real dominant pole depending on the possibly unstable plant pole, it opens up space for the design of 1-DoF and 2-DoF SL-IMC structures.
In the nominal case, SL may be approximated by a second-order transfer function (with the order appearing as the left upper index) denoted as
This can be used in an IMC design according to Figure 1, which will yield a generalisation of SL-IMC controller according to Figure 4 for FOTD systems.
Nominally, (40) has a unit steady-state gain
and a stable double real dominant pole . Thus, when neglecting all “faster” closed loop poles of in (32), it may be approximated by a stable second-order time delayed (SOTD) model
satisfying (41). Then, under condition (37), the 1-DoF SL-IMC design, or its modification to 2-DoF SL-IMC (see Figure 1 and Figure 3) may be safely applied.
If required (e.g., with respect to control constraints), the feedforward transfer function
may be generated by the primary loop of a PL-IMC based on a 2-DoF PD controller and the plant model (42) (Such a design will be illustrated in the next section).
In 2-DoF SL-IMC, the disturbance feedforward filter will be chosen in form of the filtered proportional-derivative-accelerative (PDA) controller with unity gain:
In the 1-DoF design, simply apply and in (44). (As an intermediate stage between 1-DoF and 2-DoF IMC, cancelling no or two plant model poles, it would also make sense to consider an intermediate stage with just one plant-model-pole cancelled. Because we expect such a suggestion to lead to properties between the two limit cases, we will omit it for simplicity.)
The inner positive feedback loop may then be replaced by an equivalent feedforward controller (Figure 9)
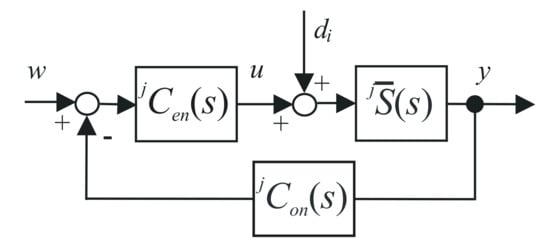
Figure 9.
Equivalent scheme of the 2-DoF IMC control for the stabilised jth order plant model.
In the simplest case with and the minimum feasible value yielding proper (44), the proposed design yields an input disturbance response
Thereby, and will be determined to cancel the stable double pole from the disturbance response, which for requires to fulfil equations
In this way it is possible to speed up transients. From (47), the corresponding solutions are
4.3. PD Controller for SL-IMC Design Based on the PL with 2nd Order SL Approximation
In Definition 1 and Remark 1, we have already pointed to the possibility of implementing TF-, or PL-IMC using setpoint feedforward based on a single transfer function or primary loop. We will further develop these possibilities in generalising the SL-IMC loop according to Definition 2 and Figure 4 with an UFOTD system and a stabilising 2-DoF P controller.
When using the second-order transfer function (42) as the stabilising loop approximation (as in (43) or in Figure 10), due to the neglected loop dynamics corresponding to , a non-zero reconstructed disturbance signal appeared also in situations without external disturbances (see Figure 11).
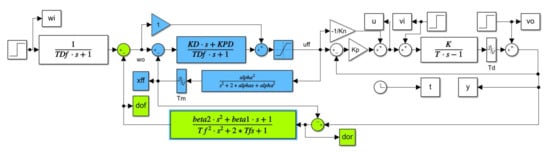
Figure 10.
2-DoF PL-IMC with PD controller (49) for 2nd order model of SL (42) (blue) approximating the UFOTD plant (1) stabilised by 2DoF P controller (white background) designed to yield a double real dominant pole; the disturbance reconstruction & disturbance feedforward (44) designed for the 2nd order SL approximation (42) (green); setpoint prefilter with the time constant used to reduce the PD controller output kicks after setpoint step changes.
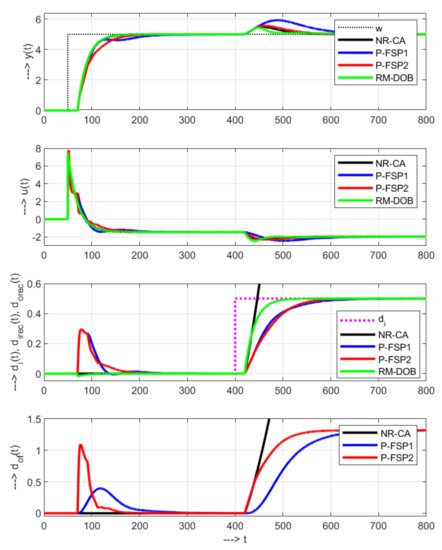
Figure 11.
Transient responses of the plant (20) for a setpoint step at and an input disturbance step at , nominal plant parameters , , , : with the 2-DoF FSP according to [19], 1-DoF and 2-DoF SL-IMC controllers (denoted as P-FSP1 and P-FSP2) for unstable plant stabilised by 2-DoF P control derived by a two-step design from Section 4.2 and Section 4.3 and the controller with setpoint and disturbance reference models and disturbance observer from [20]; and , .
For both the TF- and PL-IMC 2-DoF SP implementations, the settings (48) of remain the same.
The stabilising loop approximation by (42) will also be used to set the parameters of the primary loop PD controller, which inverts the dynamics of the stabilised loop. When firstly neglecting the PD implementation filter, required by the derivative action, i.e., for
combined with the delay-free part of the system model (42) , we get for (49) the following primary loop characteristic polynomial (42)
Due to the dead-time value neglected in PD tuning, such a simplified tuning (52) is expected to give usable results when
Similar specifications as (53) can be applied to the disturbance feedforward filter , as well.
In order to get a proper PD controller transfer function, it is necessary to use an appropriate filter. For example, Figure 10 uses the series filter specified with the time constant chosen as . A prefilter with the same time constant may also be used to decrease derivative kicks of after steps of the setpoint w.
5. Simulation: Nominal Dynamics and the Robustness Evaluation
Transient responses corresponding to 2-DoF FSP according to [19] from the rxample in Section 3.1 and to modified SL-IMC controllers from Section 4.2 and Section 4.3 with nominal tuning are in Figure 11. Thereby, the transients 1-2 correspond to 1-DoF and 2-DoF IMC according to Figure 1 for SL approximated by 2nd order transfer functions (42). In comparison with the controller based on disturbance observer (DOB) and a stabilising master controller with the setpoint and disturbance reference models (RMs) from [20] they are rather slow. Its feedforward tuning corresponds to (5) with , the stabilising controller to (36) and the DOB filter time constant is .
Imperfect approximation of the stabilised loop SL is demonstrated by non-zero disturbance reconstructed during the setpoint steps, when no external disturbances are active. The decreased speed of these transient responses is demonstrated by the Integral of Absolute Error (IAE) values in Figure 12 calculated according to
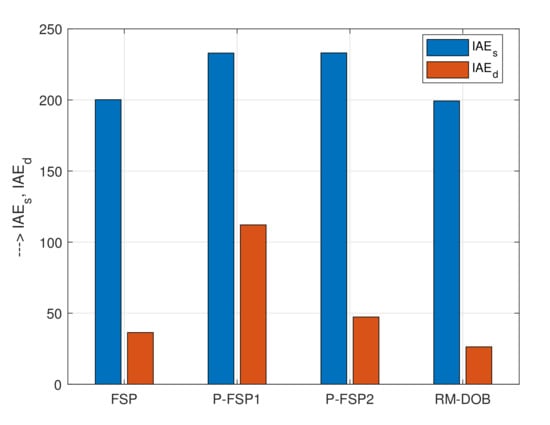
Figure 12.
values corresponding to transients in Figure 11.
However, the seemingly “perfect” responses of the 2DOF SP do not guarantee stability and, in turn, the modifications used in the so called Filtered Smith predictor eliminate the reconstructed disturbance signal from the circuit (which would be diverging to infinity). Although the simplified design of the IMC controller with stabilisation of the controlled UFOTD system gives the transients close to the optimal responses, the question arises whether it will still not work better in the case of unstable systems with observers derived directly for input disturbance reconstruction [20].
However, a different situation arises when dealing with perturbed models (Figure 13), when for the IAE values corresponding to the stabilised model and 2DOF SP (Figure 14) roughly correspond to the use of (unstable) FSP. However, to get stable responses, for the DOB-RM controller, the setting of the parameter had to be reduced to .
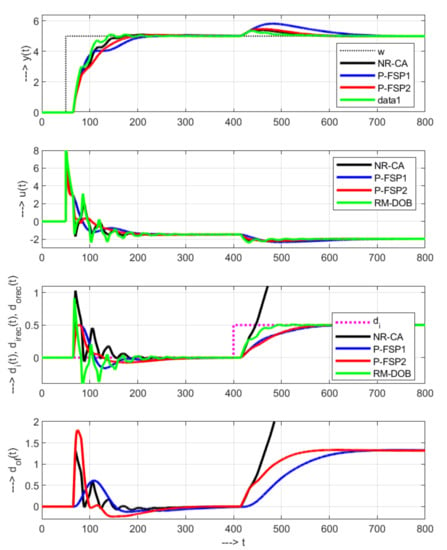
Figure 13.
Transient responses of the plant (20) for a setpoint step at and an input disturbance step at , nominal plant parameters , , , : with the 2-DoF FSP according to [19], 1-DoF and 2-DoF SL-IMC controllers (denoted as P-FSP1 and P-FSP2) for unstable plant stabilised by 2-DoF P control derived by a two-step design from Section 4.2 and Section 4.3 and the controller with setpoint and disturbance reference models and disturbance observer from [20] with the modified tuning ; and , .
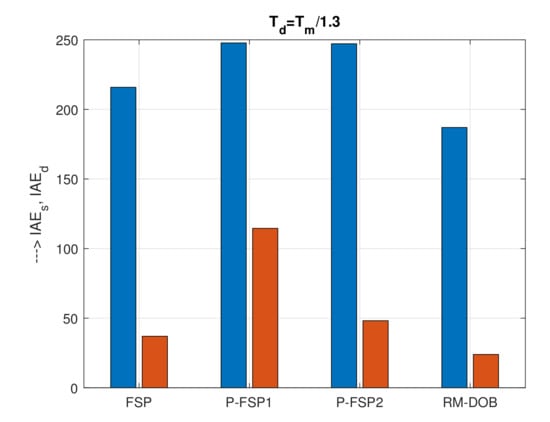
Figure 14.
values corresponding to transients in Figure 13.
More importantly, the shapes corresponding to the stabilised systems are much smoother, which plays an important role in terms of equipment wear, excess energy consumption, acoustic noise produced, mechanical vibrations, unwanted heat, etc. To quantify them, we will use the modifications of total variation (TV) introduced by Skogestad [2]. The deviation from the monotonicity, which is current in setpoint steps, is evaluated with the help of
When evaluating deviations from pulses composed of two monotone sections, which are current in the course of the control action and the reactions of the output variable to the disturbance steps, we get by a double application of performance measures
A point with the value (local extreme) divides the two considered monotone sections of y between the initial and final values and . Evaluation results in Figure 15 confirm very high sensitivity of the original FSP control (questioned e.g., in [54]) but also very high sensitivity of the RM-DOB solution from [20] and the possibility of its substantial reduction by stabilising the system (due to the several orders of magnitude higher excessive effort of FSP and RM-DOB setpoint responses, a logarithmic representation had to be used).
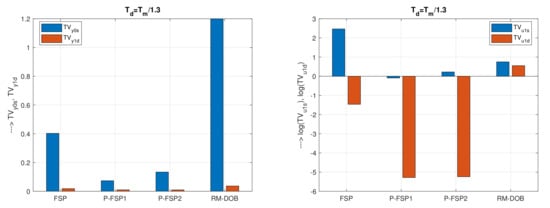
Figure 15.
The shape related and values corresponding to transients in Figure 13.
6. Discussion
Based on the thorough application of Theorem 1 from [23], it was possible to uncover and interpret the hidden asymmetry of FSP properties when applied to the control of unstable and stable processes and point out the need for modification of the unstable case. At the same time, we avoided the commonly used solution, which eliminates the unbounded signal of output disturbance reconstruction by connecting two inner loops of the 2-DoF SP (equivalent to PL-IMC), while losing one of the basic functional advantages of SP—the possibility of offering information on the acting disturbances.
Two modifications of solutions of different complexity, based on the stabilisation of an unstable system by the 2-DoF P controller, allow different approximations to the unstable dynamics of FSP, i.e., the possibility of achieving practically the same transient speed while substantially increasing their robustness. Solutions based on second-order stabilising loop approximations are typically with a monotonic response to setpoint steps.
7. Conclusions
The paper revealed the unusual behaviour of the filtered Smith predictor applied to the control of unstable FOTD systems and it points out that such a solution is inappropriate without additional corrections.
As one of possible alternatives, the paper designed, verified and applied the 1-DoF or 2-DoF IMC design to a circuit with the UFOTD plant stabilised by a 2-DoF P controller tuned by the double real dominant pole method. Although the proposed controllers lead to a partial reduction in the dynamics of the nominal solution, they also yield improved robustness of the perturbed systems. Therefore, given the persistent reservations of the scientific community about the robustness of FSP [54], it will be interesting to analyse the proposed solutions in more detail. At this point, however, there is again the need to look for new innovative solutions. The traditional robustness analysis based on sensitivity functions does not always confirm the intuitively expected and experimentally verified results [55]. One of the basic problems in the control of unstable systems is the fact that the necessary values of sensitivity functions [56] can far exceed the textbook recommendations valid for stable systems. Alternative approaches to robustness analysis can again be based on deviations from ideal transient shapes [57]. In any case, a deeper analysis of the robustness problems of the controllers proposed in this paper will require separate work.
Another interesting issue, which remains for future research, is the evaluation of the noise effects. In the future work it will be necessary to evaluate the influence of the order of filters used and a low-pass filter in the stabilising loop with P controller or even with higher order stabilising controllers.
Author Contributions
Writing—original draft preparation, M.H. Simulations, P.B. and M.H. Editing, D.V. and M.H. Project administration, P.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the grants APVV SK-IL-RD-18-0008 Platoon Modelling and Control for mixed autonomous and conventional vehicles: a laboratory experimental analysis, VEGA 1/0745/19 Control and modelling of mechatronic systems in emobility and P2-0001 financed by the Slovenian Research Agency.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
Supported by Slovenská e-akadémia, n. o.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| 1-DoF | One Degree of Freedom |
| 2-DoF | Two Degree of Freedom |
| DTC | Dead Time Compensator |
| FOTD | First Order Time Delayed |
| FSP | Filtered Smith Predictor |
| IMC | Internal Model Control |
| PID | Proportional-Integrative-Derivative |
| PL | Primary Loop |
| SL | Stabilised Loop |
| SP | Smith Predictor |
| TF | Transfer Function |
| UFOTD | Unstable First Order Time Delayed |
References
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules, 3rd ed.; Imperial College Press: London, UK, 2009. [Google Scholar]
- Skogestad, S. Simple analytic rules for model reduction and PID controller tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef]
- Vítečková, M.; Víteček, A. 2DOF PID controller tuning for integrating plants. In Proceedings of the 2016 17th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 29 May–1 June 2016; pp. 793–797. [Google Scholar]
- Sladka, K.; Viteckova, M. 2DOF PI Controller Tuning for Integrating Plants with the Setting of Setpoint Weight. In Proceedings of the 2019 20th International Carpathian Control Conference (ICCC), Krakow-Wieliczka, Poland, 26–29 May 2019; pp. 1–4. [Google Scholar]
- Rodríguez, C.; Aranda-Escolástico, E.; Guzmán, J.L.; Berenguel, M.; Hägglund, T. Revisiting the simplified IMC tuning rules for low-order controllers: Novel 2DoF feedback controller. IET Control Theory Appl. 2020, 14, 1700–1710. [Google Scholar] [CrossRef]
- Vrečko, D.; Vrančič, D.; Jurčič, D.; Strmčnik, S. A new modified Smith predictor: The concept, design and tuning. ISA Trans. 2001, 40, 111–121. [Google Scholar] [CrossRef]
- Zhong, Q.; Normey-Rico, J. Control of integral processes with dead-time. Part 1: Disturbance observer-based 2DOF control scheme. IEE Proc. Control Theory Appl. 2002, 149, 285–290. [Google Scholar] [CrossRef]
- Zhong, Q.; Mirkin, L. Control of integral processes with dead-time. Part 2: Quantitative analysis. IEE Proc. Control Theory Appl. 2002, 149, 291–296. [Google Scholar] [CrossRef]
- Zhong, Q. Control of integral processes with dead-time. Part 3: Dead-beat disturbance response. IEEE Trans. AC 2003, 48, 153–159. [Google Scholar] [CrossRef]
- Normey-Rico, J.; Camacho, E. Dead-time compensators: A survey. Control Eng. Pract. 2008, 16, 407–428. [Google Scholar] [CrossRef]
- Torrico, B.; Normey-Rico, J. 2 DOF discrete dead-time compensators for stable and integrative processes with dead-time. J. Process Control 2005, 15, 341–352. [Google Scholar] [CrossRef]
- Santos, T.L.; Botura, P.E.; Normey-Rico, J.E. Dealing with noise in unstable dead-time process control. J. Process Control 2010, 20, 840–847. [Google Scholar] [CrossRef]
- Richard, J.P. Time-delay systems: An overview of some recent advances and open problems. Automatica 2003, 39, 1667–1694. [Google Scholar] [CrossRef]
- O’Dwyer, A. An Overview of Tuning Rules for the PI and PID Continuous-Time Control of Time-Delayed Single-Input, Single-Output (SISO) Processes. In PID Control in the Third Millennium. Lessons Learned and New Approaches; Vilanova, R., Visioli, A., Eds.; Springer: Berlin, Germany, 2012. [Google Scholar]
- Chen, S.; Xue, W.; Zhong, S.; Huang, Y. On comparison of modified ADRCs for nonlinear uncertain systems with time delay. Sci. China Inf. Sci. 2018, 61, 70223. [Google Scholar] [CrossRef]
- Zhao, S.; Gao, Z. Modified active disturbance rejection control for time-delay systems. ISA Trans. 2014, 53, 882–888. [Google Scholar] [CrossRef]
- Pekař, L. On Simple Algebraic Control Design and Possible Controller Tuning for Linear Systems with Delays. Int. J. Mech. 2018, 12, 178–191. [Google Scholar]
- Pekař, L.; Gao, Q. Spectrum Analysis of LTI Continuous-Time Systems With Constant Delays: A Literature Overview of Some Recent Results. IEEE Access 2018, 6, 35457–35491. [Google Scholar] [CrossRef]
- Normey-Rico, J.; Camacho, E. Unified approach for robust dead-time compensator design. J. Process Control 2009, 19, 38–47. [Google Scholar] [CrossRef]
- Huba, M.; Bisták, P.; Vrančić, D.; Zakova, K. Asymmetries in the Disturbance Compensation Methods for the Stable and Unstable First Order Plants. Symmetry 2020, 12, 1595. [Google Scholar] [CrossRef]
- Morari, M.; Zafiriou, E. Robust Process Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Smith, O. Closser control of loops with dead time. Chem. Eng. Prog. 1957, 53, 217–219. [Google Scholar]
- Schrijver, E.; van Dijk, J. Disturbance Observers for Rigid Mechanical Systems: Equivalence, Stability, and Design. ASME J. Dyn. Sys. Meas. Control 2002, 124, 539–548. [Google Scholar] [CrossRef]
- Reswick, J.B. Disturbance-Response Feedback - a new control concept. Trans. ASME 1956, 1, 153–162. [Google Scholar]
- Huba, M.; Kuľha, P. Saturating Control for the Dominant First Order Plants. In Proceedings of the IFAC Workshop “Motion Control“, Munich, Germany, 9–11 October 1995; pp. 197–204. [Google Scholar]
- Huba, M.; Kuľha, P.; Žákova, K. Observer-Based Control of Unstable Process with Dead Time. In Proceedings of the 10th Conference Process Control ’95, Tatranské Matliare, Slovakia, 4–7 June 1995; Volume 1, pp. 35–38. [Google Scholar]
- Huba, M.; Bisták, P.; Skachová, Z.; Žáková, K. P- and PD-Controllers for I1 and I2 Models with Dead Time. In Proceedings of the 6th IEEE Mediterranean Conference, Theory and Practice of Control and Systems, Alghero, Sardinia, Italy, 9–11 June 1998; Volume 11, pp. 514–519. [Google Scholar]
- Huba, M.; Bisták., P.; Skachová, Z.; Žáková, K. Predictive Antiwindup PI and PID-Controllers Based on I1 and I2 Models with Dead Time. In Proceedings of the 6th IEEE Mediterranean Conference, Theory and Practice of Control and Systems, Alghero, Sardinia, Italy, 9–11 June 1998; Volume 11, pp. 532–535. [Google Scholar]
- Garcia, P.; Albertos, P. A new dead-time compensator to control stable and integrating processes with long dead-time. Automatica 2008, 44, 1062–1071. [Google Scholar] [CrossRef]
- Albertos, P.; García, P. Robust control design for long time-delay systems. J. Process Control 2009, 19, 1640–1648. [Google Scholar] [CrossRef]
- Sanz, R.; García, P.; Albertos, P. A generalized smith predictor for unstable time-delay SISO systems. ISA Trans. 2018, 72, 197–204. [Google Scholar] [CrossRef]
- Åström, K.J.; Hägglund, T. Advanced PID Control; ISA: Research Triangle Park, NC, USA, 2006. [Google Scholar]
- Torrico, B.C.; Cavalcante, M.U.; Braga, A.P.S.; Normey-Rico, J.E.; Albuquerque, A.A.M. Simple Tuning Rules for Dead-Time Compensation of Stable, Integrative, and Unstable First-Order Dead-Time Processes. Ind. Eng. Chem. Res. 2013, 52, 11646–11654. [Google Scholar] [CrossRef]
- Zhang, M.; Jiang, C. Problem and its solution for actuator saturation of integrating process with dead time. ISA Trans. 2008, 47, 80–84. [Google Scholar] [CrossRef] [PubMed]
- Huba, M.; Ťapák, P. Experimenting with Modified Smith Predictors Using B&R Automation Studio Target for Simulink. IFAC Proc. Vol. 2012, 45, 366–371. [Google Scholar]
- Normey-Rico, J.; Bordons, C.; Camacho, E. Improving the robustness of dead-time compensating PI controllers. Control Eng. Pract. 1997, 5, 801–810. [Google Scholar] [CrossRef]
- Normey-Rico, J.; Camacho, E. Control of Dead-Time Processes; Springer: London, UK, 2007. [Google Scholar]
- Huba, M.; Halas, M. New Filtered Smith Predictors for FOPDT Plants. Part 1. First Order Disturbance Filter. In ERK 2010—Devetnajsta Mednarodna Elektrotehniska in Racunalniska Konferenca; IEEE: Portoroz, Slovenija, 2010; pp. 339–342. [Google Scholar]
- Huba, M.; Halas, M. New Filtered Smith Predictors for FOPDT Plants. Part 2. Second Order Disturbance Filters. In ERK 2010—Devetnajsta mednarodna Elektrotehniska in racunalniska konferenca; IEEE: Portoroz, Slovenija, 2010; pp. 343–345. [Google Scholar]
- Huba, M. Modified Filtered Smith Predictors for FOPDT Plants. In Preprints of the Workshop “Selected Topics on Constrained and Nonlinear Control“; Huba, M., Skogestad, S., Fikar, M., Hovd, M., Johansen, T., Roháľ-Ilkiv, B., Eds.; STU Bratislava—NTNU Trondheim: Bratislava, Slovakia, 2011; pp. 185–191. [Google Scholar]
- Huba, M.; Ťapák, P. Experimenting with the Modified Filtered Smith Predictors for FOPDT Plants. In World Congress; Bittanti, S., Cenedese, A., Zampieri, S., Eds.; IFAC-PapersOnLine: Milano, Italy, 2011; Volume 18, pp. 2452–2457. [Google Scholar]
- Huba, M.; Bélai, I. Limits of a Simplified Controller Design Based on IPDT models. ProcIMechE Part I J. Syst. Control Eng. 2018, 232, 728–741. [Google Scholar] [CrossRef]
- Torrico, B.C.; Correia, W.B.; Nogueira, F.G. Simplified dead-time compensator for multiple delay SISO systems. ISA Trans. 2016, 60, 254–261. [Google Scholar] [CrossRef]
- Torrico, B.C.; de Almeida Filho, M.P.; Lima, T.A.; do N. Forte, M.D.; Sá, R.C.; Nogueira, F.G. Tuning of a dead-time compensator focusing on industrial processes. ISA Trans. 2018, 83, 189–198. [Google Scholar] [CrossRef]
- Torrico, B.C.; de Almeida Filho, M.P.; Lima, T.A.; Santos, T.L.; Nogueira, F.G. New simple approach for enhanced rejection of unknown disturbances in LTI systems with input delay. ISA Trans. 2019, 94, 316–325. [Google Scholar] [CrossRef]
- Rodrigues, R.S.; Sombra, A.; Torrico, B.; Pereira, R.; de Almeida Filho, M.; Nogueira, F.G. Tuning rules for unstable dead-time processes. Eur. J. Control 2020. in Press. [Google Scholar] [CrossRef]
- DePaor, A. A modified Smith predictor and controller for unstable processes with time delay. Int. J. Control 1985, 41, 1025–1036. [Google Scholar]
- DePaor, A.; O’Malley, M. Controller of Ziegler-Nichols type for unstable process with time delay. Int. J. Control 1989, 49, 1273–1284. [Google Scholar] [CrossRef]
- Majhi, S.; Atherton, D.P. A new Smith predictor and controller for unstable and integrating processes with time delay. In Proceedings of the IEEE Conference on Control and Decision, Tampa, FL, USA, 18 December 1998; pp. 1341–1345. [Google Scholar]
- Liu, T.; Cai, Y.; Gu, D.; Zhang, W. New modified Smith predictor scheme for integrating and unstable processes with time delay. IEE Proc. 2005, 152, 238–246. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, W.; Gu, D. Analytical design of two-degree-of-freedom control scheme for open-loop unstable processes with delay. J. Process Control 2005, 15, 559–572. [Google Scholar] [CrossRef]
- Lu, X.; Yang, Y.; Wang, Q.; Zheng, W. A double two-degree-of-freedom control scheme for improved control of unstable delay processes. J. Process Control 2005, 15, 605–614. [Google Scholar] [CrossRef]
- Vrancic, D.; Huba, M. Design of feedback control for unstable processes with time delay. In Proceedings of the 18th International Conference Process Control, Tatranská Lomnica, Slovakia, 14–17 June 2011; pp. 100–105. [Google Scholar]
- Sigurd Skogestad, C.G. Should we forget the Smith Predictor? IFAC-PapersOnLine 2018, 51, 769–774. [Google Scholar] [CrossRef]
- Huba, M.; Vrančić, D.; Bisták, P. PID Control with Higher Order Derivative Degrees for IPDT Plant Models. IEEE Access 2021, 9, 2478–2495. [Google Scholar] [CrossRef]
- Boskovic, M.C.; Sekara, T.B.; Rapaic, M.R. Novel tuning rules for PIDC and PID load frequency controllers considering robustness and sensitivity to measurement noise. Int. J. Electr. Power Energy Syst. 2020, 114, 105416. [Google Scholar] [CrossRef]
- Huba, M. Performance measures, performance limits and optimal PI control for the IPDT plant. J. Process Control 2013, 23, 500–515. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).