
Precise Trajectory Tracking Control of Ship Towing Systems via a Dynamical Tracking Target


Abstract
1. Introduction
- An appropriate passive steering angle is introduced to make the towed ship track well the trajectory of the tugboat.
- A dynamical tracking target, sliding mode control, and inverse dynamics adaptive control methods are introduced to design two robust torque controllers for the STS, so that the tugboat and the towed ship can move along the same target trajectory curve accurately under uncertainties.
2. System Modeling
- A1.
- The motion of the STS is in a horizontal plane. The ship roll, pitch, heave, and lateral drift motions are negligibly small.
- A2.
- The motion of the towed ship is achieved by the system coupling action.
- A3.
- The nonlinear force is ignored, since the STS commonly does not make large maneuvers.
- A4.
- The rudder cannot be controlled directly, and the motion of the towed ship is controlled indirectly by the coupling action of nonholonomic constraints.
- A5.
- The resistance force of the towline is ignored.
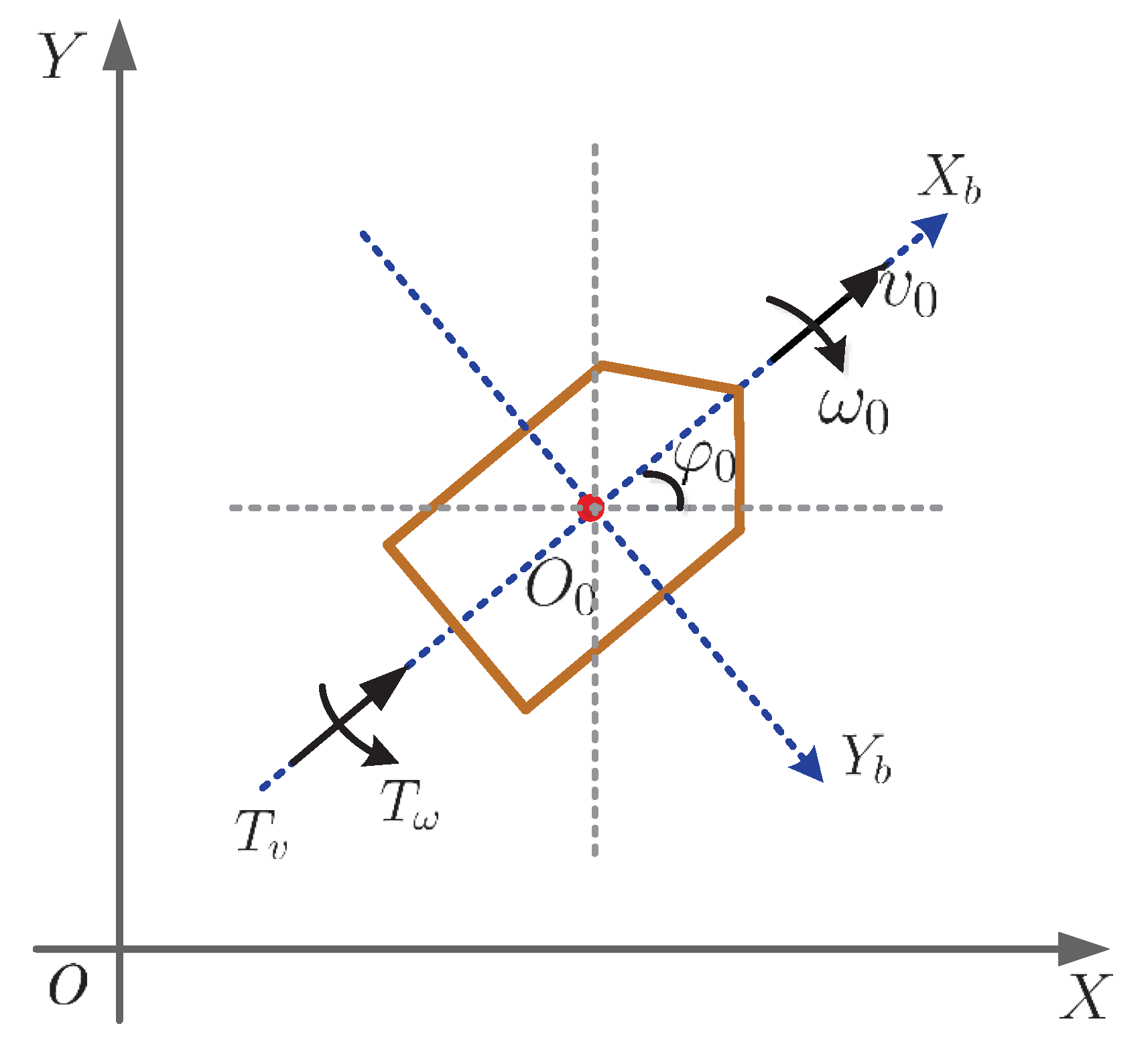
2.1. Kinematics Modeling
2.2. Dynamics Modeling of a Single Ship
2.3. Dynamics Modeling
3. Trajectory Tracking Control of the Ship Towing System
3.1. Dynamical Tracking Target
3.2. Control Design
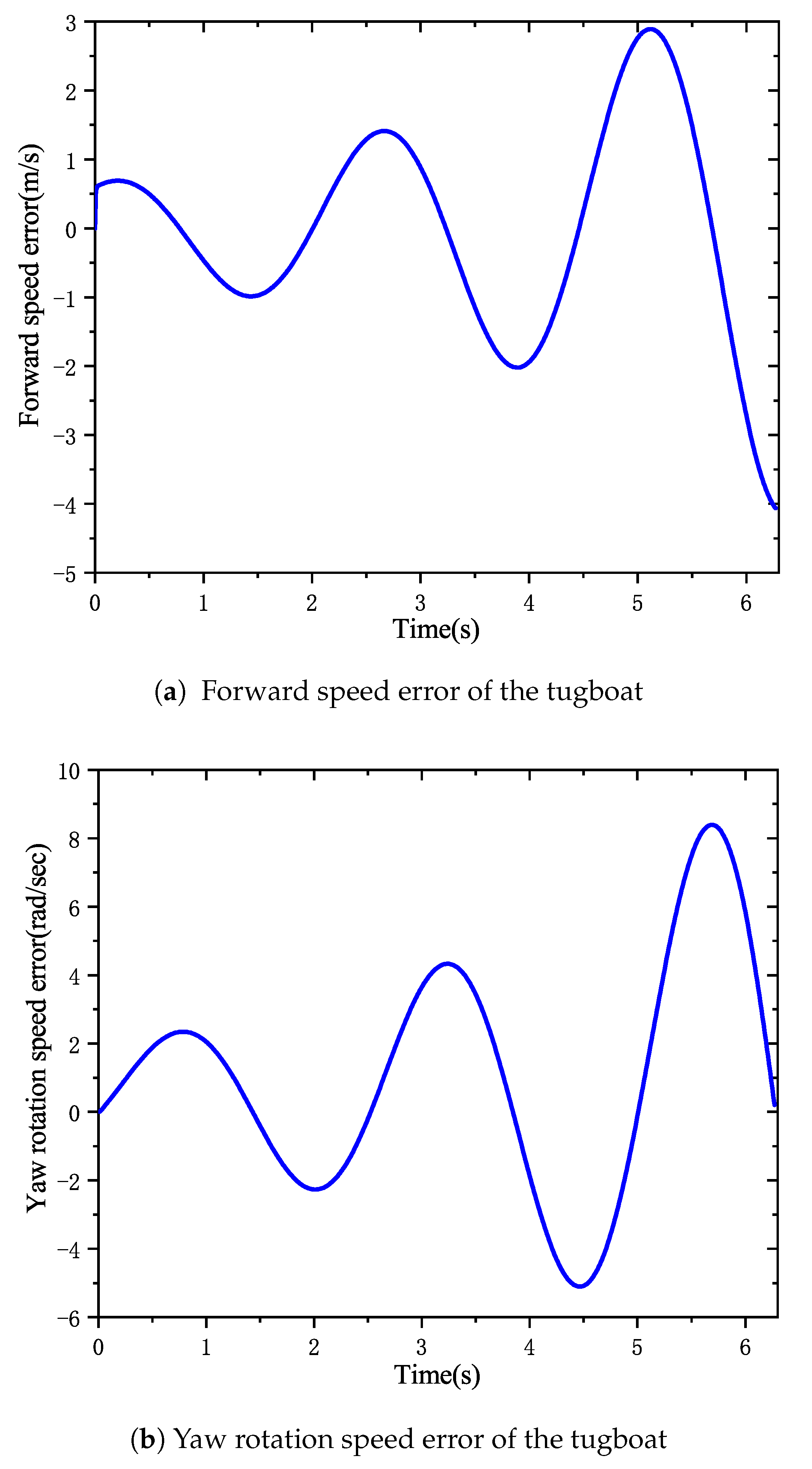
3.2.1. Forward Speed Control Subsystem
3.2.2. Yaw Rotation Speed Control Subsystem
4. Simulation Results
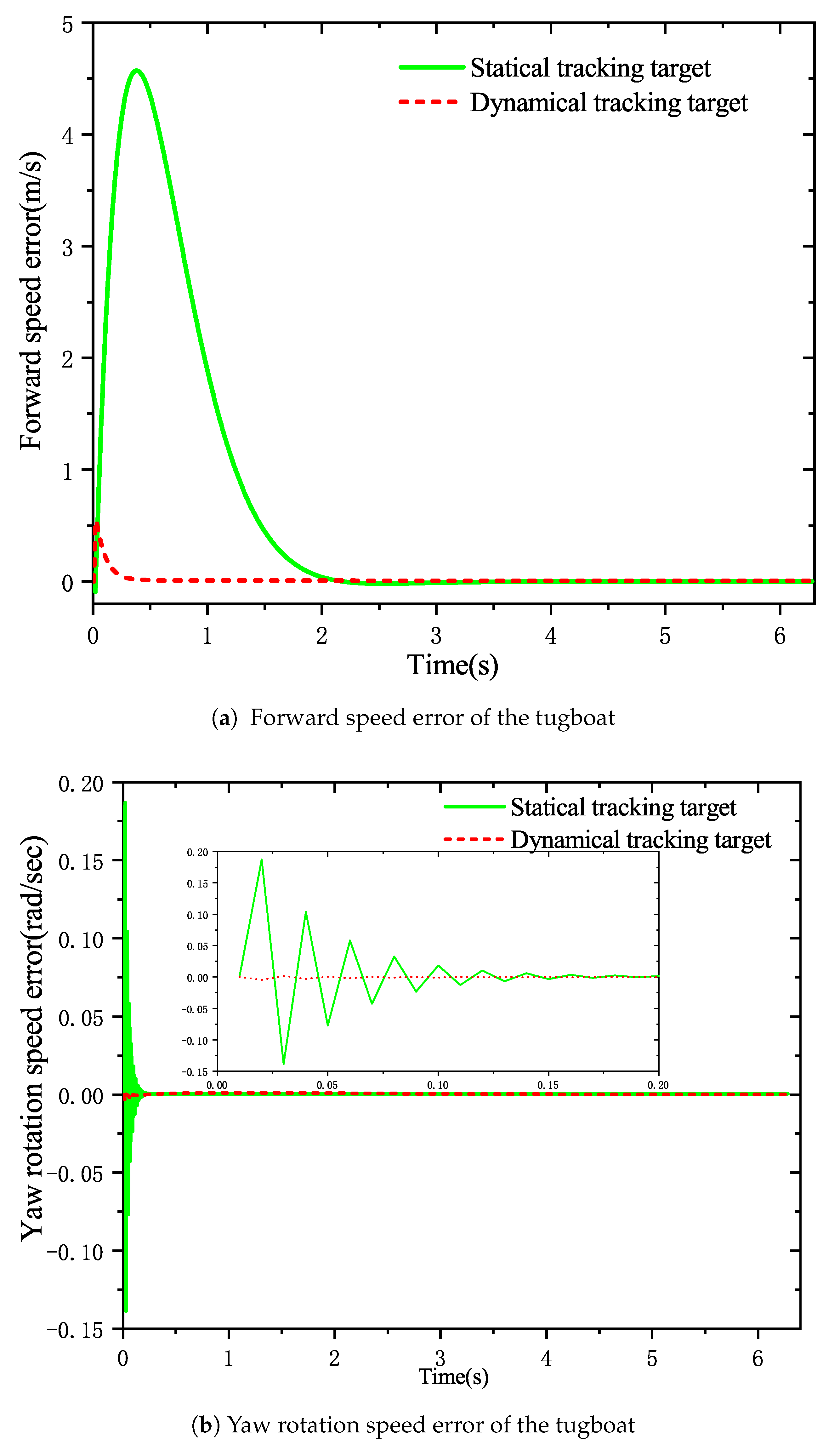
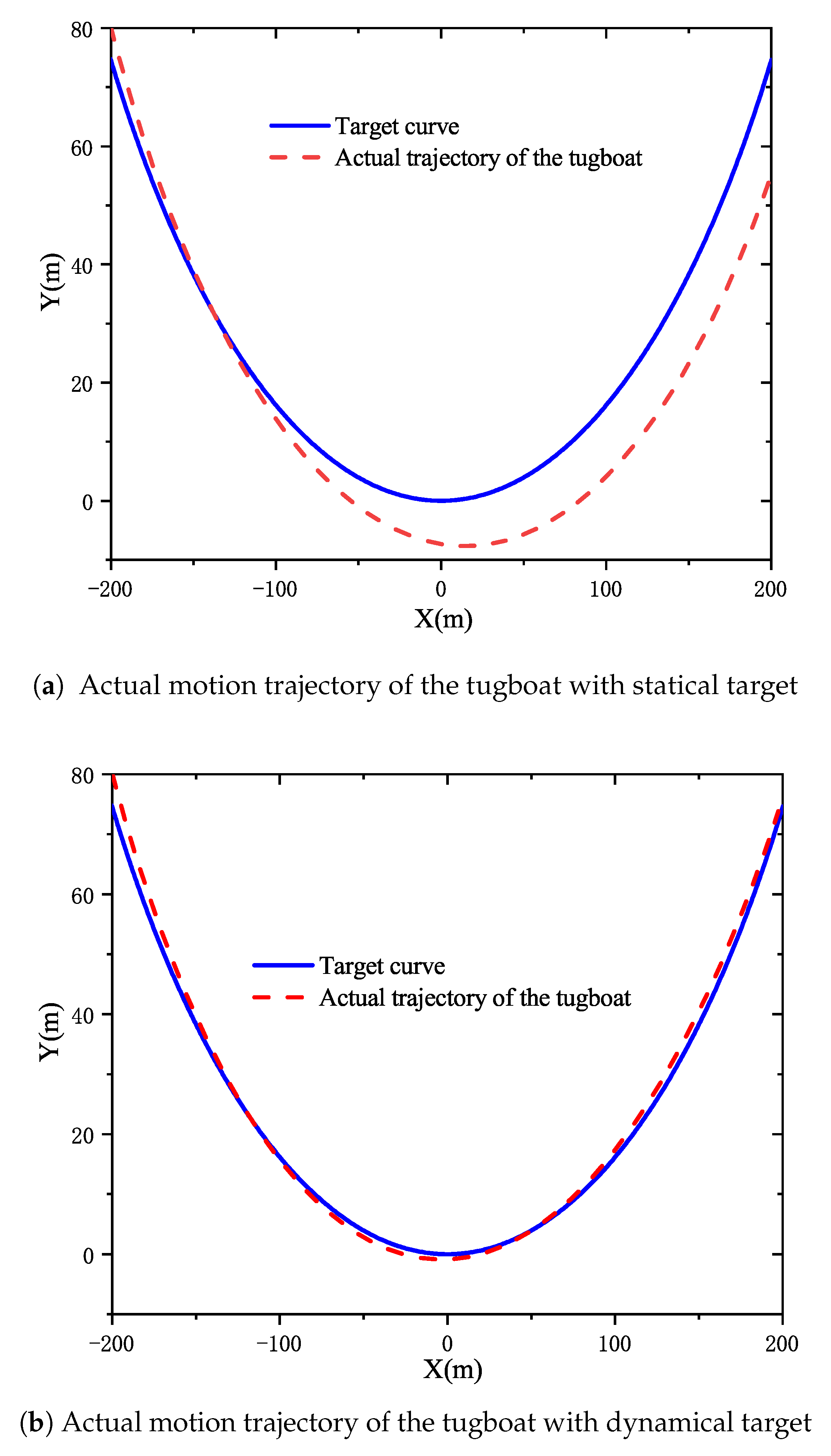
4.1. A Comparison between the Dynamical Target and Statical Target
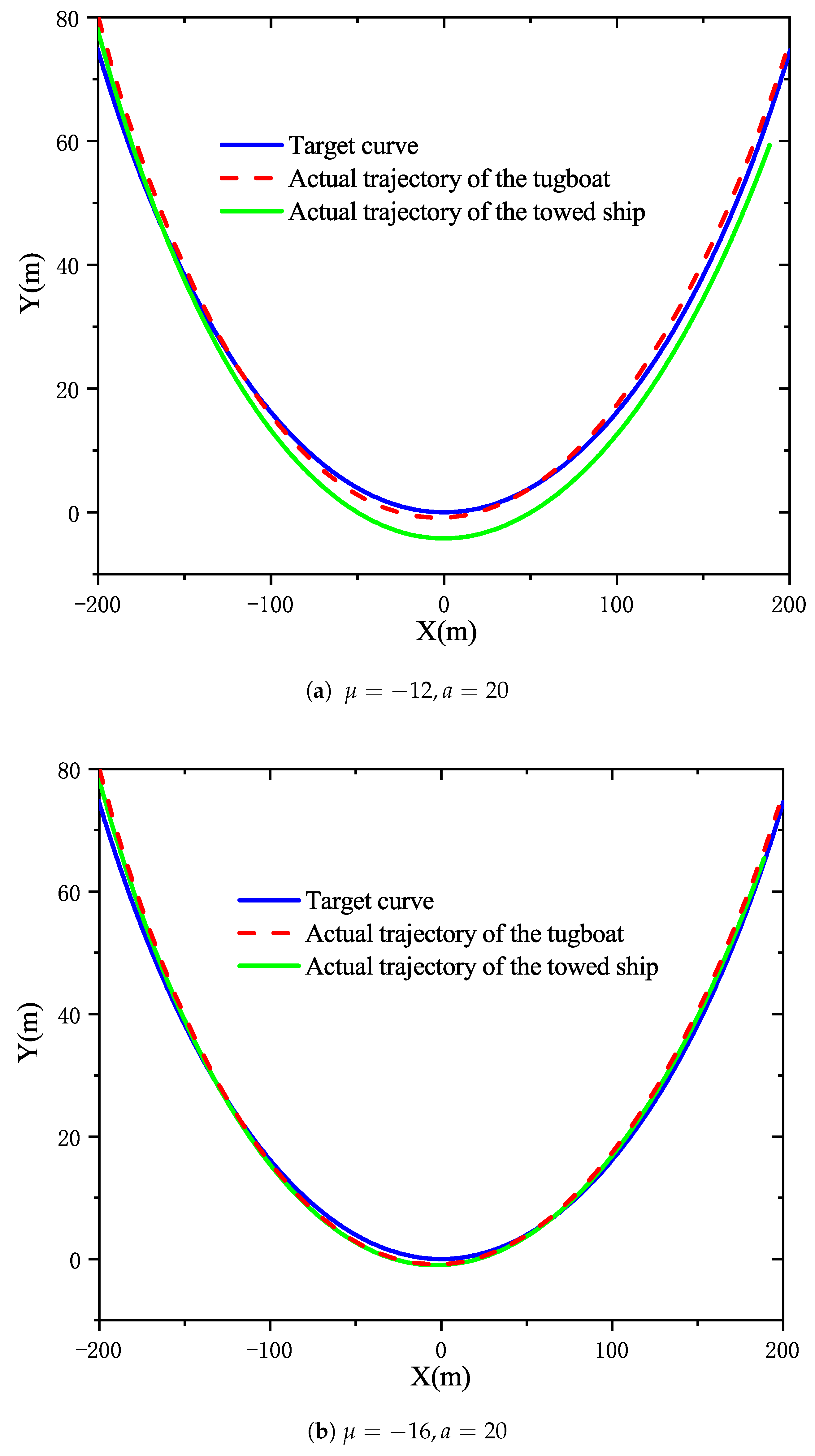
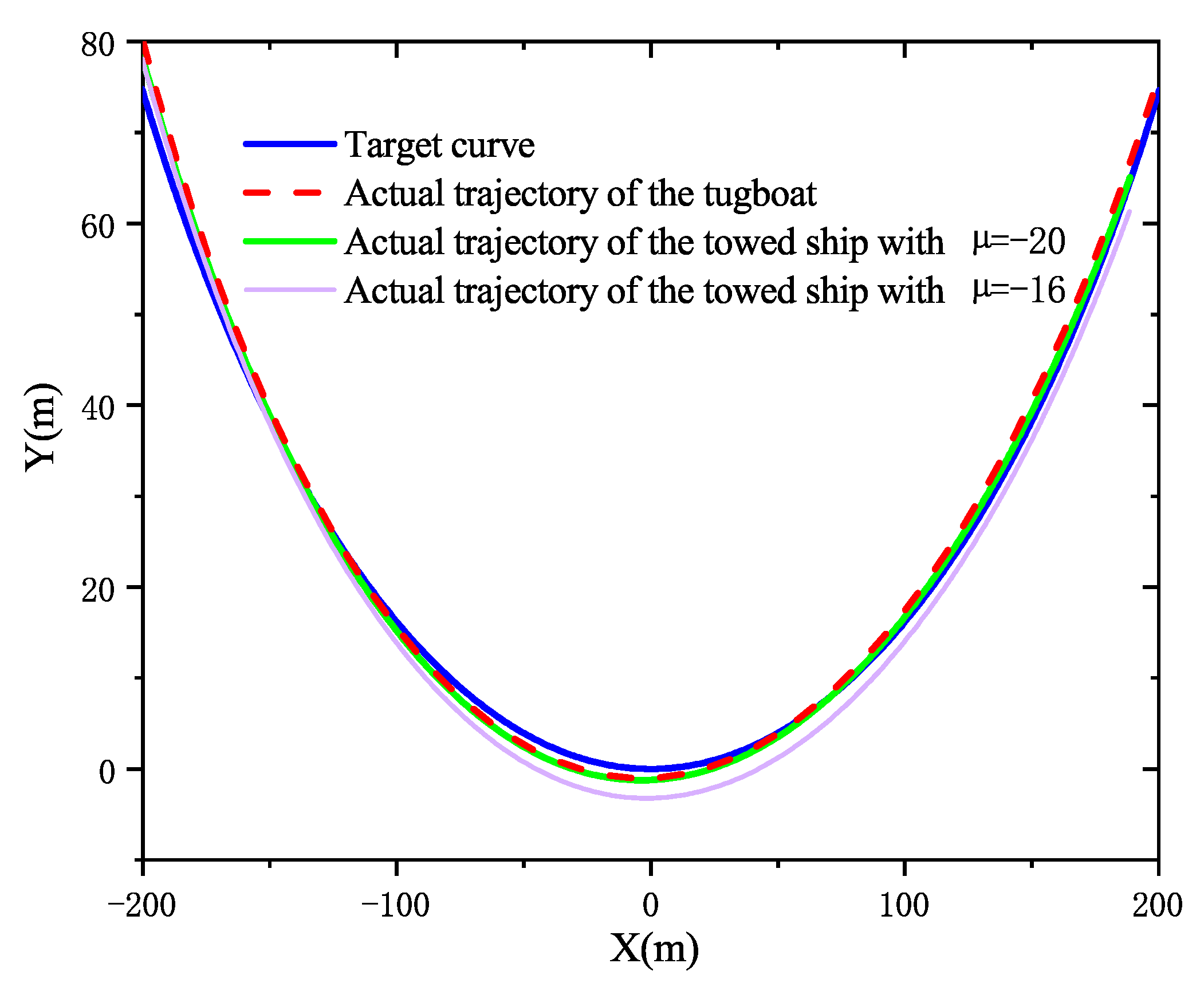
4.2. Actual Trajectories of the Towed Ship with Different Steering Coefficients
4.3. Robustness of the Proposed Controller
5. Conclusions
- The towed ship is able to move along the trajectory of the tugboat by introducing an appropriate passive steering angle. Then, the original motion control problem is transformed into the tugboat tracking the target trajectory curve.
- The target trajectory curve is converted into a dynamical tracking target by using the relative curvature of the target curve, which can fundamentally solve the problem of accurate tracking for the ship towing system.
- By combining dynamical tracking target, sliding mode control and inverse dynamic adaptive control, the torque controller has strong robustness. Even if the error speed subsystem is unstable affected by an uncertain factor, all bodies can still track the target trajectory curve accurately.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tao, J.; Du, L.; Dehmer, M.; Wen, Y.Q.; Xie, G.G.; Zhou, Q. Path following control for towing system of cylindrical drilling platform in presence of disturbances and uncertainties. ISA Trans. 2019, 95, 185–193. [Google Scholar] [CrossRef]
- Kishimoto, T.; Kijima, K. The manoeuvring characteristics on tug-towed ship systems. IFAC Proc. Vol. 2001, 34, 173–178. [Google Scholar] [CrossRef]
- Laumond, J.P.; Risler, J.J. Nonholonomic systems: Controllability and complexity. Theor. Comput. Sci. 1996, 157, 101–114. [Google Scholar] [CrossRef]
- Tao, J.; Henn, R.; Sharma, S.D. Dynamic behavior of a tow system under an autopilot on the tug. Int. Symp. Workshop Forces Act. Manoeuring Vessel 1998, 2, 16–18. [Google Scholar]
- Tao, J. Autonomous oscillations and bifurcations of a tug-tanker tow. Ship Technol. Res. 1997, 44, 4–12. [Google Scholar]
- Lee, M.L. Dynamic stability of nonlinear barge-towing system. Appl. Math. Model. 1989, 13, 693–701. [Google Scholar] [CrossRef]
- Wu, Y.Y.; Wu, Y.Q. Robust stabilization for nonholonomic systerms with state delay and nonline drifits. J. Control Theory Appl. 2011, 9, 256–260. [Google Scholar] [CrossRef]
- Zhang, D.S. Optimization Design of Ship Rudder Steering Stability Optimization Control System. Inst. Manag. Sci. Ind. Eng. 2019, 1, 535–538. [Google Scholar]
- Alessandretti, A.; Aguiar, A.P.; Jones, C.N. Trajectory-tracking and path-following controllers for constrained underactuated vehicles using Model Predictive Control. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; Volume 1, pp. 1371–1376. [Google Scholar]
- Abdelaal, M.; Fra¨nzle, M.; Hahn, A. Nonlinear model predictive control for tracking of underactuated vessels under input constraints. In Proceedings of the 2015 IEEE European Modelling Symposium (EMS), Madrid, Spain, 6–8 October 2015; Volume 1, pp. 6–8. [Google Scholar]
- Xu, H.; Ioannou, P.A. Robust adaptive control for a class of MIMO nonlinear systems with guaranteed error bounds. IEEE Trans. Autom. Control 2003, 48, 728–742. [Google Scholar]
- Jin, H.K.; Sung, J.Y. Adaptive Event-Triggered Control Strategy for Ensuring Predefined Three-Dimensional Tracking Performance of Uncertain Nonlinear Underactuated Underwater Vehicles. Mathematics 2021, 9, 137. [Google Scholar]
- Ashrafiuon, H.; Muske, K.R.; McNinch, L.C.; Soltan, R.A. Sliding-mode tracking control of surface vessels. IEEE Trans. Ind. Electron. 2008, 55, 4004–4012. [Google Scholar] [CrossRef]
- Lefeber, E.; Pettersen, K.Y.; Nijmeijer, H. Tracking control of an underactuated ship. IEEE Trans. Control Syst. Technol. 2003, 11, 52–61. [Google Scholar] [CrossRef]
- Sun, L. Dynamic Modeling, Trajectory Generation and Tracking for Towed Cable Systems. Ph.D. Thesis, Brigham Young University, Provo, UT, USA, 2012; pp. 1–137. [Google Scholar]
- Zhang, Q.; Ding, Z.; Zhang, M. Adaptive self-regulation PID control of course-keeping for ships. Pol. Marit. Res. 2020, 27, 39–45. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef]
- Fossen, T.I.; Breivik, M.; Skjetne, R. Line-of-sight path following of underactuated marine craft. IFAC Proc. Vol. 2003, 36, 211–216. [Google Scholar] [CrossRef]
- Paliotta, C.; Lefeber, E.; Pettersen, K.Y.; Pinto, J.; Costa, M. Trajectory tracking and path following for underactuated marine vehicles. IEEE Trans. Control Syst. Technol. 2018, 27, 1423–1437. [Google Scholar] [CrossRef]
- Zhang, G.Q.; Zhang, X.K.; Zheng, Y.F. Adaptive neural path-following control for underactuated ships in fields of marine practice. Ocean Eng. 2015, 104, 558–567. [Google Scholar] [CrossRef]
- Zhou, Y.S.; Wang, Z.H.; Chung, K.K. Turning motion control design of a two-wheeled inverted pendulum by using planar curve theory and dynamical tracking target. J. Optim. Theory Appl. 2019, 181, 634–652. [Google Scholar] [CrossRef]
- Benedict, K.; Kirchhoff, M.; Fischer, S.; Gluch, M.; Klaes, S.; Baldauf, M. Application of Fast Time Simulation Technologies for enhanced Ship Manoeuvring Operation. IFAC Proc. Vol. 2010, 43, 79–84. [Google Scholar] [CrossRef]
- Bernitsas, M.M.; Kekridis, N.S. Simulation and stability of ship towing. Int. Shipbuild. Prog. 1985, 32, 112–123. [Google Scholar] [CrossRef]
- Bernitsas, M.M.; Kekridis, N.S. Nonlinear stability analysis of ship towed by elastic rope. J. Ship Res. 1986, 30, 136–146. [Google Scholar] [CrossRef]
- Zhou, Y.S.; Wang, Z.H. Robust motion control of a two-wheeled inverted pendulum with an input delay based on optimal integral sliding mode manifold. Nonlinear Dyn. 2016, 85, 2065–2074. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| , | Torques provided by the propeller and rudder of the tugboat |
| , | Yaw angles of the tugboat and the towed ship |
| , | Yaw rotation speeds of the tugboat and the towed ship, and |
| , | The coordinates of the midpoint of the tugboat |
| , | The coordinates of the midpoint of the towed ship |
| Angular difference of yaw angles between the tugboat and the towed ship, and | |
| , | Forward speeds of the tugboat and the towed ship |
| The forward speed of the stern midpoint of the tugboat | |
| The forward speed of the bow midpoint of the towed ship | |
| Steering angle of the towed ship, and | |
| Steering coefficient of the steering angle | |
| a | Length of the rigid towline |
| Masses of the tugboat and the towed ship | |
| Additional lateral masses of the tugboat and the towed ship | |
| Moment of inertia of the tugboat and the towed ship about Z-axis through the center point | |
| Additional moments of inertia of the tugboat and the towed ship about Z-axis through the center point |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, O.; Zhou, Y. Precise Trajectory Tracking Control of Ship Towing Systems via a Dynamical Tracking Target. Mathematics 2021, 9, 974. https://doi.org/10.3390/math9090974
Li O, Zhou Y. Precise Trajectory Tracking Control of Ship Towing Systems via a Dynamical Tracking Target. Mathematics. 2021; 9(9):974. https://doi.org/10.3390/math9090974
Chicago/Turabian StyleLi, Ouxue, and Yusheng Zhou. 2021. "Precise Trajectory Tracking Control of Ship Towing Systems via a Dynamical Tracking Target" Mathematics 9, no. 9: 974. https://doi.org/10.3390/math9090974
APA StyleLi, O., & Zhou, Y. (2021). Precise Trajectory Tracking Control of Ship Towing Systems via a Dynamical Tracking Target. Mathematics, 9(9), 974. https://doi.org/10.3390/math9090974