
Impacts of Human Robot Proxemics on Human Concentration-Training Games with Humanoid Robots




Abstract
:1. Introduction
1.1. Imitation Learning
1.2. HRI Imitation
2. Materials
2.1. Human Robot Interactive Game
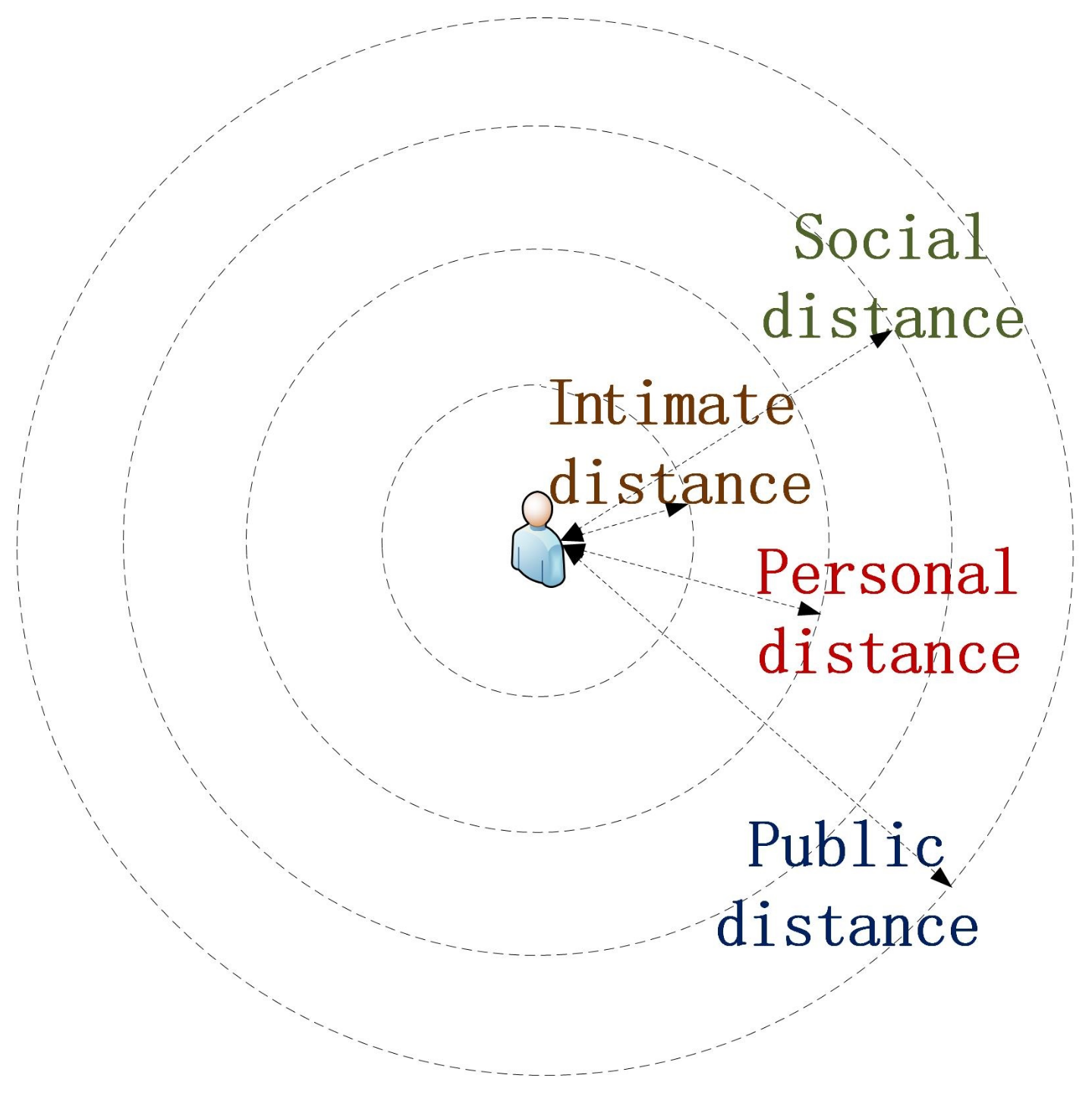
2.2. Human Robot Proxemics
2.3. Human Concentration Training
2.4. Hypotheses
3. Methods
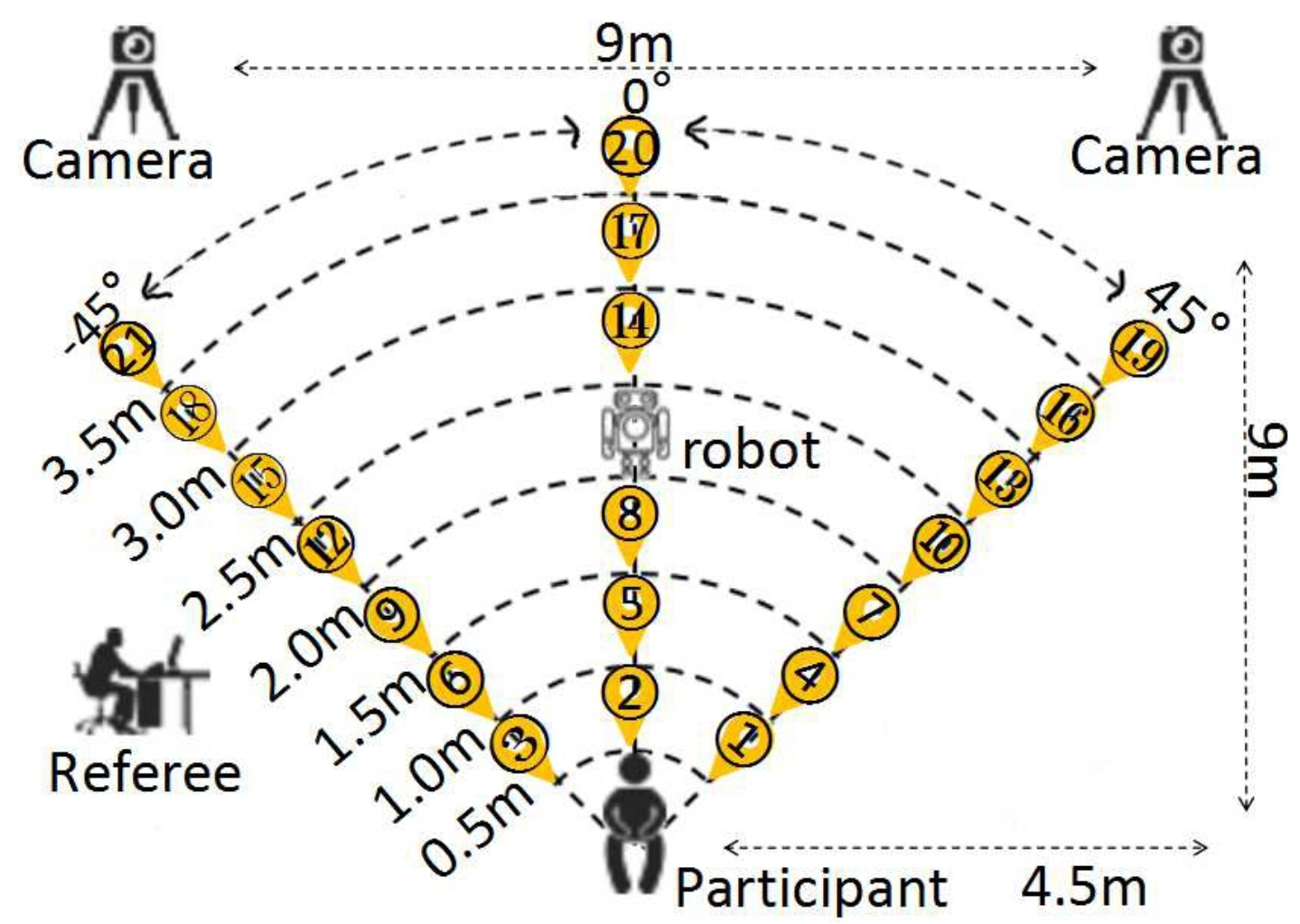
3.1. Experimental Conditions
3.2. Participation
3.3. Experimental Design
3.4. Experimental Procedure
3.5. Measurement
4. Results
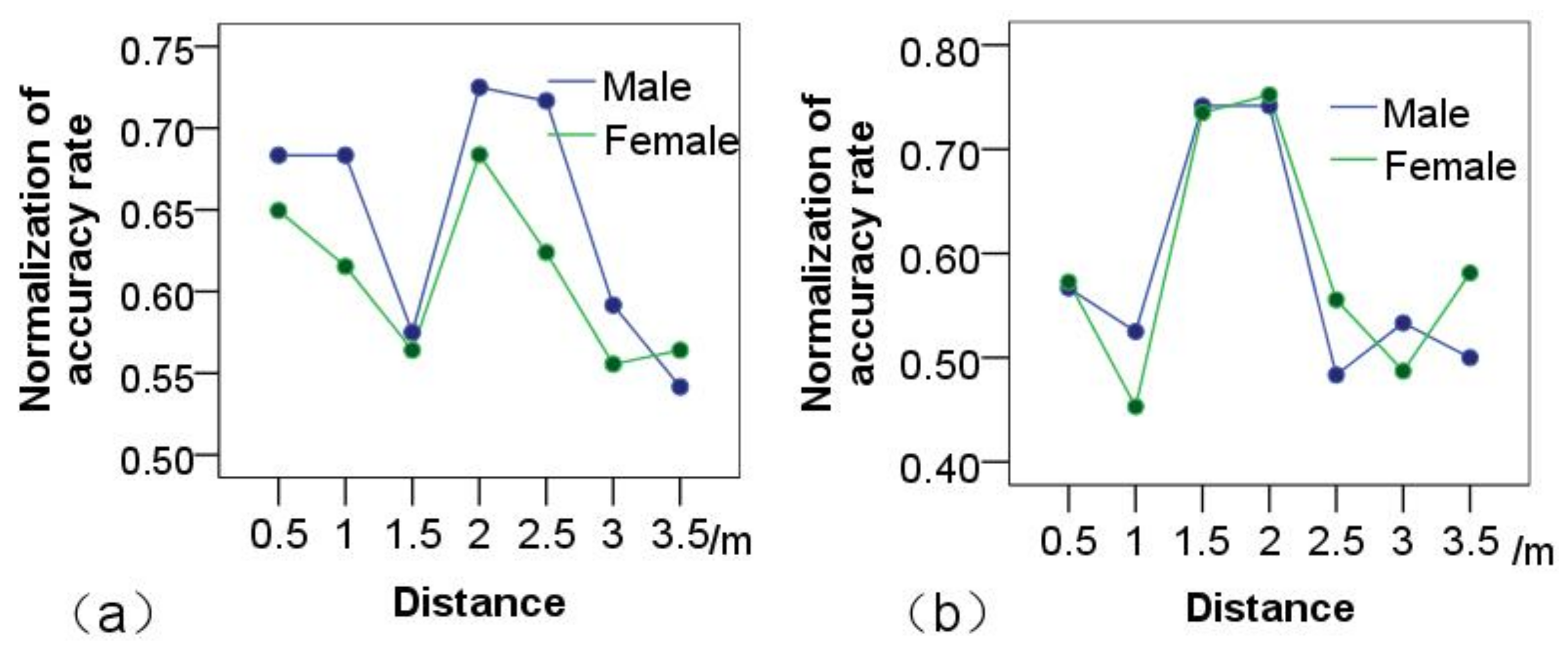
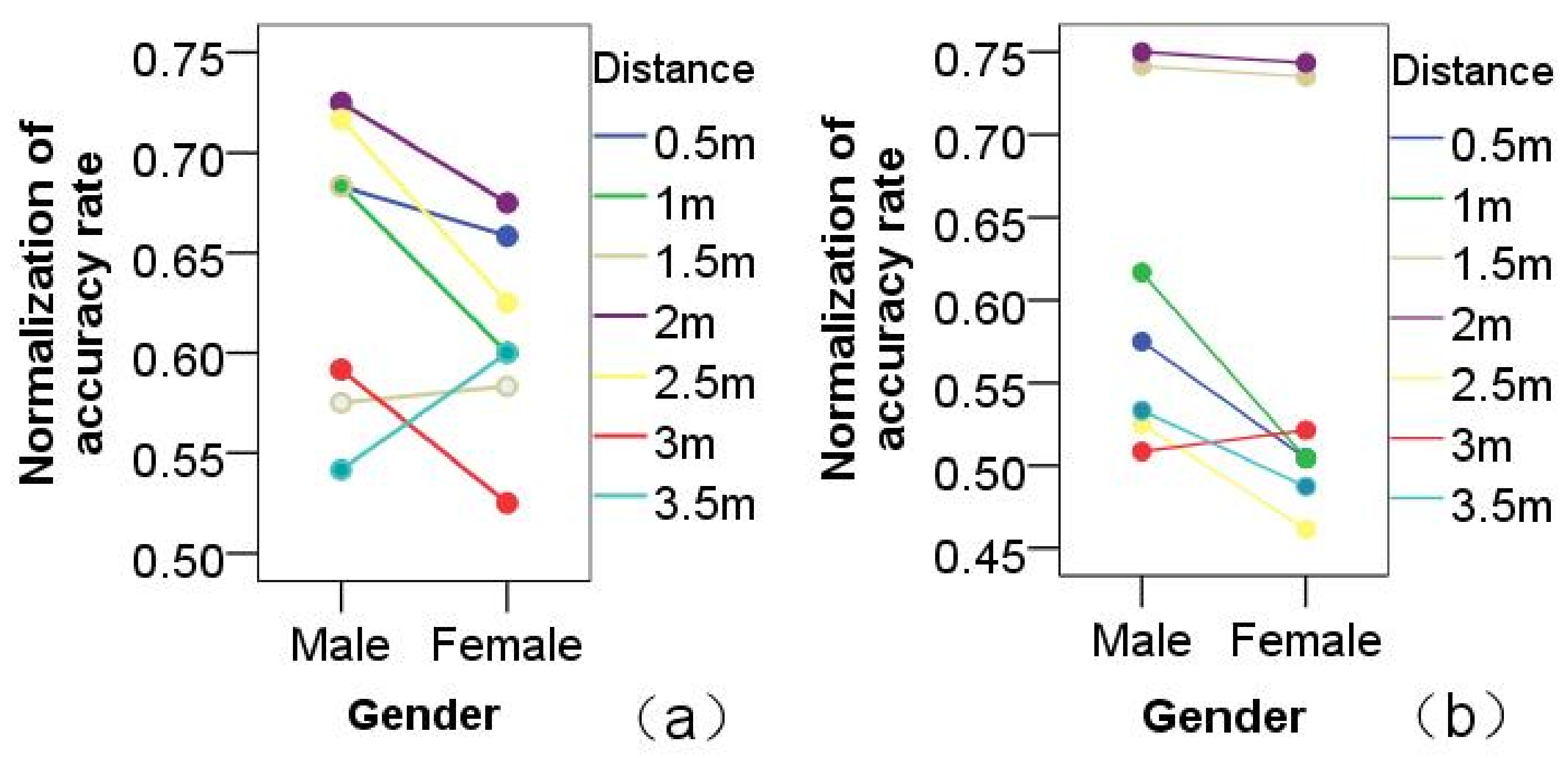
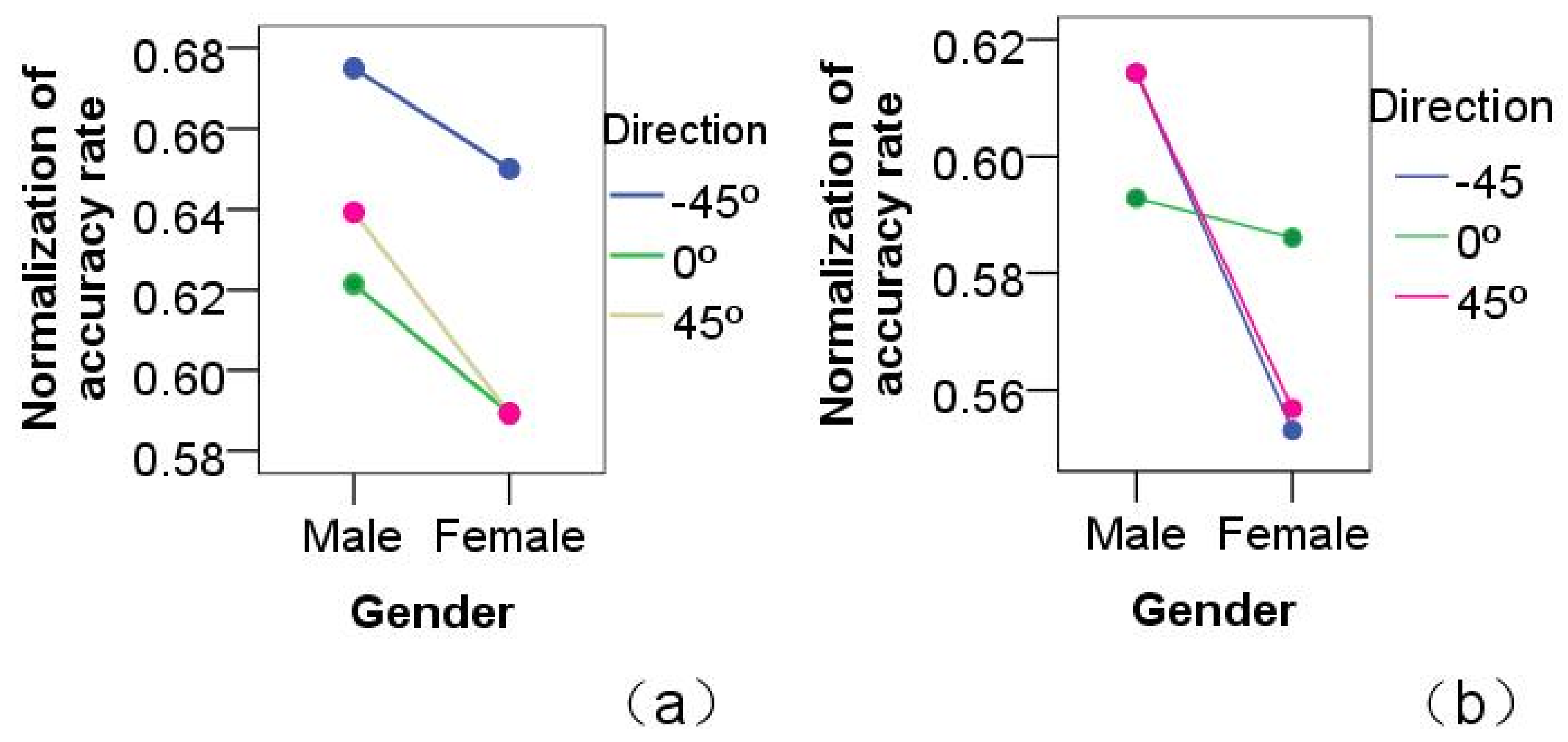
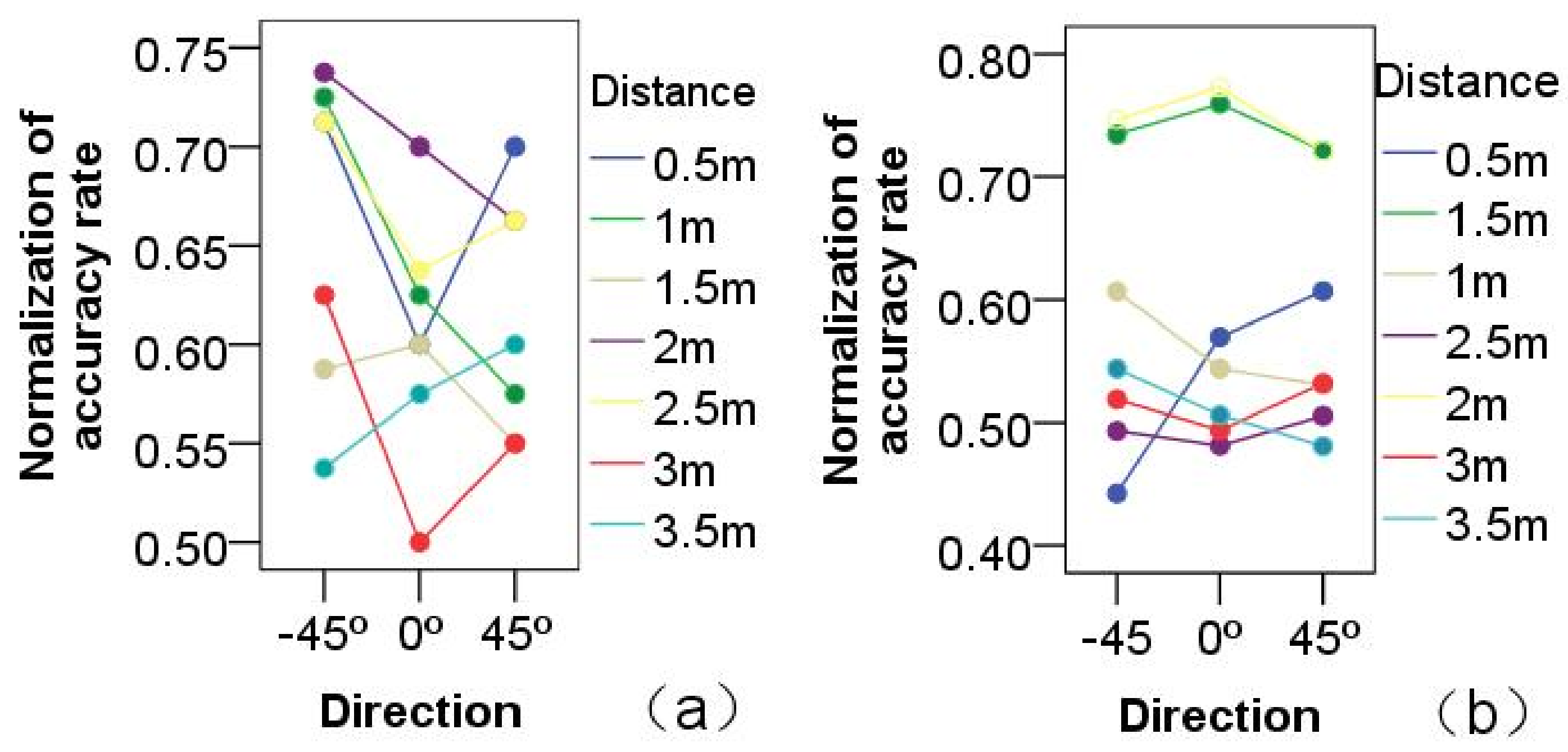
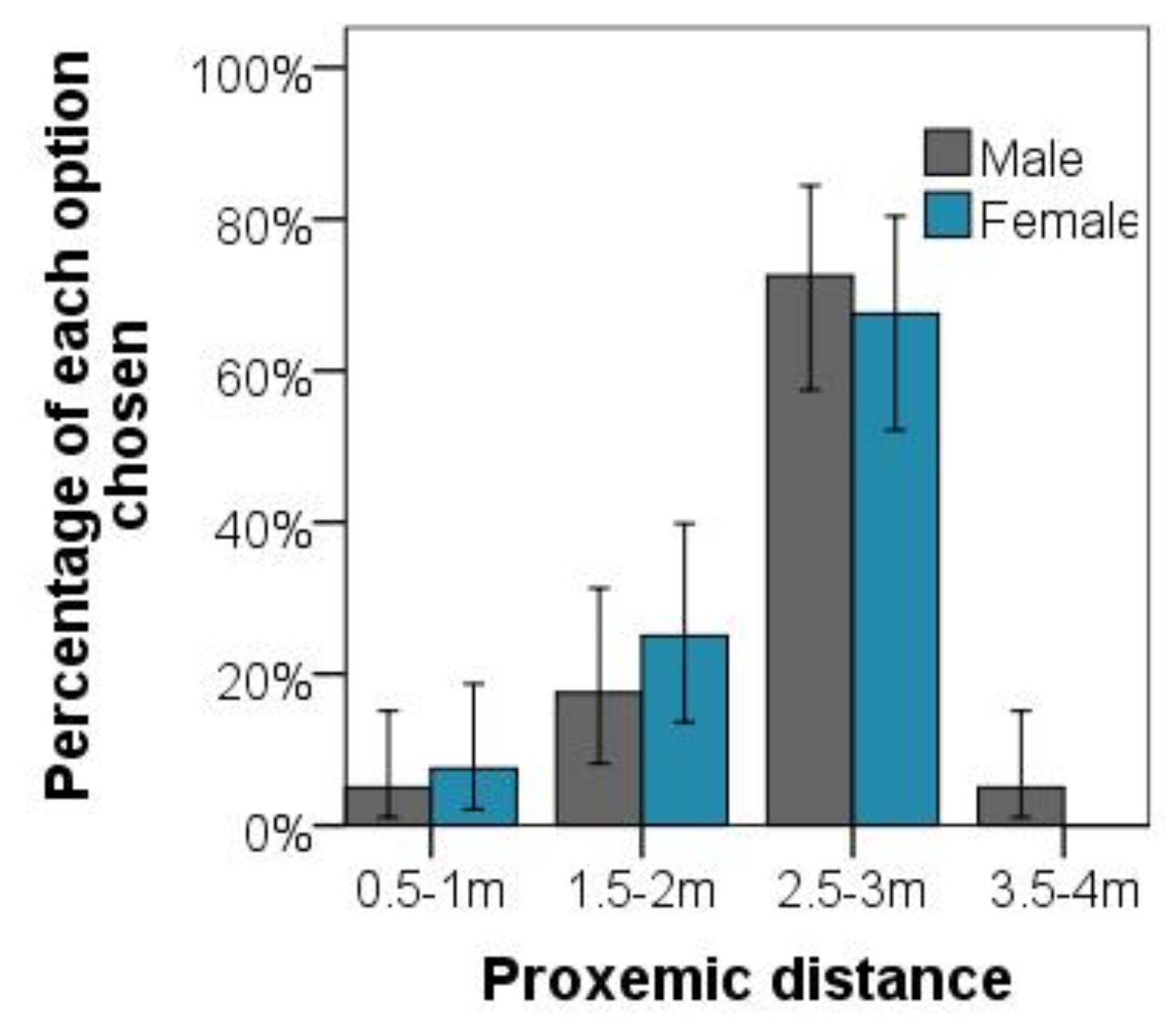
4.1. Proxemic Distance and Direction
4.2. Perception of Students’ Emotional Expression
5. Conclusions
- Direction for imitation is less important for robot trainers than for human trainers, so in a classroom, a robot may be placed at any angle in front of the learner.
- Suitable distance is good for trusting a robot, which is vital for subjects’ willingness to play with the robot.
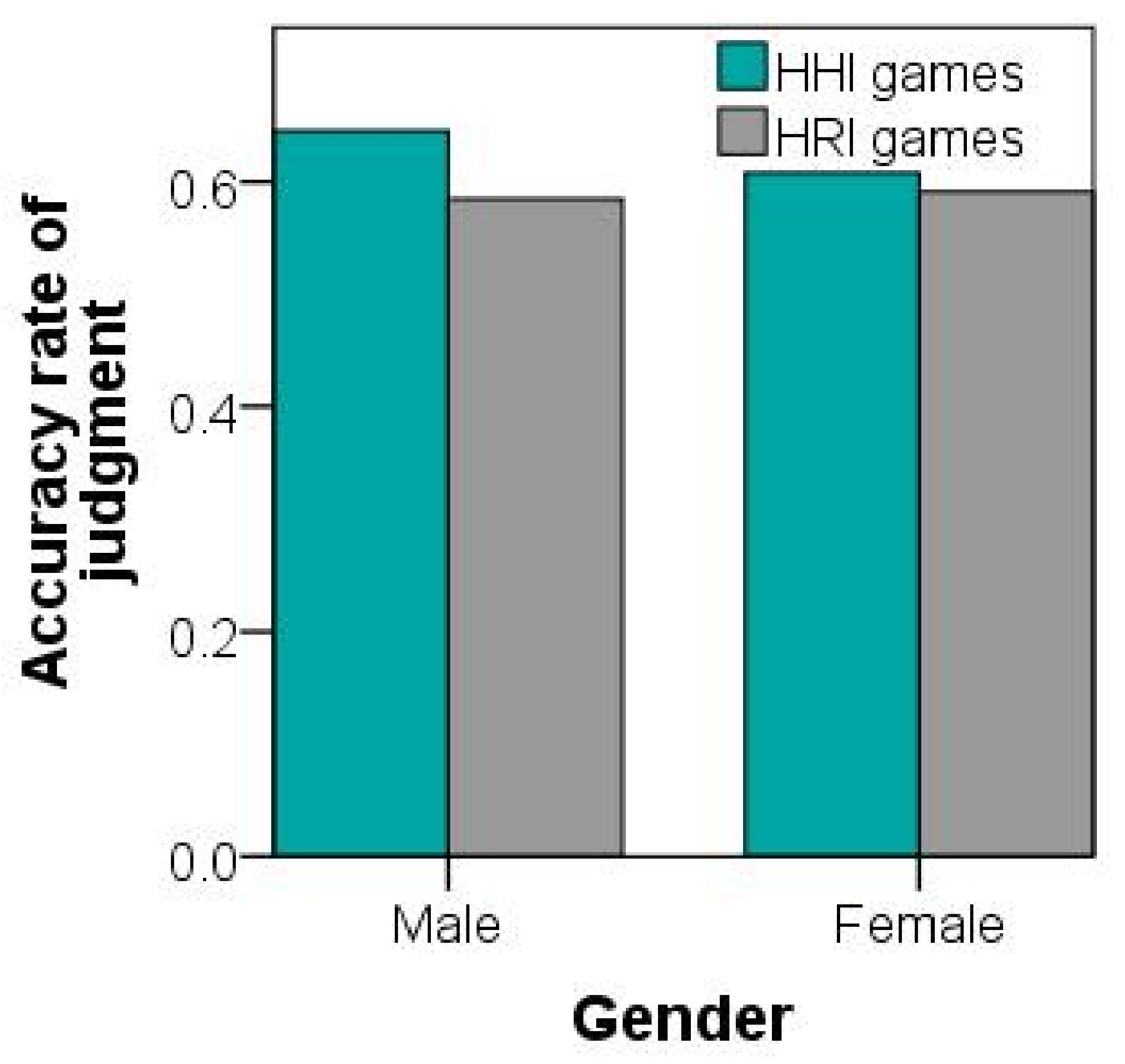
- The different physiological effects in humans collaborating with a robot partner and a human partner were comparatively analyzed.
- Students of different genders responded to HRI and HHI games differently, which indicated that female students had more interest in playing the imitation game with a humanoid robot than male students did.
- Students felt that playing with people was similar to playing with humanoid robots.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gross, H.M.; Boehme, H.; Schroeter, C.; Mueller, S.; Koenig, A.; Einhorn, E.; Martin, C.; Merten, M.; Bley, A. TOOMAS: Interactive Shopping Guide Robots in Everyday Use—Final Implementation and Experiences from Long-Term Field Trials. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2005–2012. [Google Scholar]
- Broadbent, E.; Kuo, I.H.; Lee, Y.; Rabindran, J.; Kerse, N.; Stafford, R.; Macdonald, B. Attitudes and Reactions to a Healthcare Robot. Telemed. J. E-Health Off. J. Am. Telemed. Assoc. 2010, 16, 608–613. [Google Scholar] [CrossRef] [PubMed]
- Hyun, E.; Yoon, H.; Son, S. Relationships between User Experiences and Children’s Perceptions of the Education Robot. In Proceedings of the 5th ACM/IEEE International Conference on Human-Robot Interaction, Osaka, Japan, 2–5 March 2010; pp. 199–200. [Google Scholar]
- De Jong, M.; Zhang, K.; Roth, A.M.; Rhodes, T.; Schmucker, R.; Zhou, C.; Ferreira, S.; Cartucho, J.; Veloso, M.M. Towards a Robust Interactive and Learning Social Robot. In Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent Systems, AAMAS 2018, Stockholm, Sweden, 10–15 July 2018; André, E., Koenig, S., Dastani, M., Sukthankar, G., Eds.; pp. 883–891. [Google Scholar]
- Ayerbe, M.; Gonzalez, D.; Jimenez, F.; Guerrero, E.; Correal, A. AIO robot: A EDI modular robotic dramatization platform. In Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR), Hong Kong, China, 10–12 July 2017; pp. 262–268. [Google Scholar] [CrossRef]
- Kaptein, F.; Broekens, J.; Hindriks, K.V.; Neerincx, M.A. Personalised self-explanation by robots: The role of goals versus beliefs in robot-action explanation for children and adults. In Proceedings of the 26th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN 2017, Lisbon, Portugal, 28 August–1 September 2017; pp. 676–682. [Google Scholar] [CrossRef]
- Pacchierotti, E.; Christensen, H.; Jensfelt, P. Human-robot embodied interaction in hallway settings: A pilot user study. In Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication, Nashville, TN, USA, 13–15 August 2005; Volume 2005, pp. 164–171. [Google Scholar] [CrossRef]
- Stéphane, R.; Salesse, R.; Ludovic, M.; Del-Monte, J.; Schmidt, R.; Varlet, M.; Bardy, B.; Boulenger, J.P.; Capdevielle, D. Social priming enhances interpersonal synchronization and feeling of connectedness towards schizophrenia patients. Sci. Rep. 2015, 5, 8156. [Google Scholar] [CrossRef] [Green Version]
- Jensen, W.; Hansen, S.; Knoche, H. Knowing You, Seeing Me: Investigating User Preferences in Drone-Human Acknowledgement. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–12. [Google Scholar] [CrossRef]
- Rizzolatti, G.; Craighero, L. The Mirror-Neuron System. Annu. Rev. Neurosci. 2004, 27, 169–192. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Butler, J.; Agah, A. Psychological Effects of Behavior Patterns of a Mobile Personal Robot. Auton. Robot. 2001, 10, 185–202. [Google Scholar] [CrossRef]
- Maurtua, I.; Fernandez, I.; Kildal, J.; Susperregi, L.; Tellaeche, A.; Ibarguren, A. Enhancing safe human-robot collaboration through natural multimodal communication. In Proceedings of the 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA), Berlin, Germany, 6–9 September 2016; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Song, B.; Gao, M. A Decentralized Context-aware Cross-domain Authorization Scheme for Pervasive Computing. In Proceedings of the 8th International Conference on Networks, Communication and Computing, ICNCC 2019, Luoyang, China, 13–15 December 2019; pp. 28–31. [Google Scholar] [CrossRef]
- Bethel, C.; Salomon, K.; Murphy, R.; Burke, J. Survey of Psychophysiology Measurements Applied to Human-Robot Interaction. In Proceedings of the RO-MAN 2007—The 16th IEEE International Symposium on Robot and Human Interactive Communication, Jeju, Korea, 26–29 August 2007; pp. 732–737. [Google Scholar] [CrossRef]
- Kim, Y.; Mutlu, B. How social distance shapes human–robot interaction. Int. J. Hum. Comput. Stud. 2014, 72, 783–795. [Google Scholar] [CrossRef]
- van den Brule, R.; Dotsch, R.; Bijlstra, G.; Wigboldus, D.; Haselager, P. Do Robot Performance and Behavioral Style affect Human Trust?: A Multi-Method Approach. Int. J. Soc. Robot. 2014, 6, 519–531. [Google Scholar] [CrossRef]
- De Santis, A.; Siciliano, B.; Luca, A.; Bicchi, A. An atlas of physical human-robot interaction. Mech. Mach. Theory 2008, 43, 253–270. [Google Scholar] [CrossRef] [Green Version]
- Desai, M.; Kaniarasu, P.; Medvedev, M.; Steinfeld, A. Impact of robot failures and feedback on real-time trust. In Proceedings of the 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, 3–6 March 2013. [Google Scholar] [CrossRef] [Green Version]
- Burgoon, J.; Bonito, J.; Bengtsson, B.; Cederberg, C.; Lundeberg, M.; Allspach, L. Interactivity in human-computer interaction: A study of credibility, understanding, and influence. Comput. Hum. Behav. 2000, 16, 553–574. [Google Scholar] [CrossRef]
- Wainer, J.; Dautenhahn, K.; Robins, B.; Amirabdollahian, F. A Pilot Study with a Novel Setup for Collaborative Play of the Humanoid Robot KASPAR with Children with Autism. Int. J. Soc. Robot. 2014, 6, 45–65. [Google Scholar] [CrossRef] [Green Version]
- Jerčić, P.; Wen, W.; Hagelbäck, J.; Sundstedt, V. The Effect of Emotions and Social Behavior on Performance in a Collaborative Serious Game Between Humans and Autonomous Robots. Int. J. Soc. Robot. 2017, 10, 115–129. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Liu, T.; Shi, J.; Wang, X.; Yin, Z.; Zhao, C. Aspect level sentiment classification with unbiased attention and target enhanced representations. In Proceedings of the 35th Annual ACM Symposium on Applied Computing, Brno, Czech Republic, 30 March–3 April 2020; pp. 843–850. [Google Scholar] [CrossRef] [Green Version]
- Robinette, P.; Li, W.; Allen, R.; Howard, A.; Wagner, A. Overtrust of Robots in Emergency Evacuation Scenarios. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016. [Google Scholar] [CrossRef]
- Lin, Y.; Min, H.; Zhou, H.; Pei, F. A Human-Robot-Environment Interactive Reasoning Mechanism for Object Sorting Robot. IEEE Trans. Cogn. Dev. Syst. 2017. [Google Scholar] [CrossRef]
- Robins, B.; Dautenhahn, K. Tactile Interactions with a Humanoid Robot: Novel Play Scenario Implementations with Children with Autism. Int. J. Soc. Robot. 2014, 6, 397–415. [Google Scholar] [CrossRef] [Green Version]
- Chin, K.Y.; Hong, Z.W.; Chen, Y.L. Impact of Using an Educational Robot-Based Learning System on Students’ Motivation in Elementary Education. IEEE Trans. Learn. Technol. 2014, 7, 333–345. [Google Scholar] [CrossRef]
- Yilmazyildiz, S.; Read, R.; Belpeame, T.; Verhelst, W. Review of Semantic-Free Utterances in Social Human–Robot Interaction. Int. J. Hum. Comput. Interact. 2016, 32, 63–85. [Google Scholar] [CrossRef]
- Zaga, C.; Lohse, M.; Truong, K.P.; Evers, V. The Effect of a Robot’s Social Character on Children’s Task Engagement: Peer Versus Tutor. In Social Robotics; Tapus, A., André, E., Martin, J.C., Ferland, F., Ammi, M., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 704–713. [Google Scholar]
- Williams, T.; Briggs, P.; Scheutz, M. Covert Robot-Robot Communication: Human Perceptions and Implications for Human-Robot Interaction. J. Hum. Robot Interact. 2015, 4, 24–49. [Google Scholar] [CrossRef] [Green Version]
- Ross Mead, A.A.; Matarić, M.J. Representations of Proxemic Behavior for Human-Machine Interaction; Workshop, NordiCHI: Copenhagen, Denmark, 2012. [Google Scholar]
- Feil-Seifer, D.; Mataric, M. Automated Detection and Classification of Positive vs. Negative Robot Interactions with Children with Autism Using Distance-Based Features. In Proceedings of the 6th International Conference on Human-Robot Interaction, Lausanne, Switzerland, 8–11 March 2011; Association for Computing Machinery: New York, NY, USA, 2011; pp. 323–330. [Google Scholar] [CrossRef] [Green Version]
- Van Oosterhout, T.; Visser, A.O.T. A Visual Method for Robot Proxemics Measurements. In Proceedings of Metrics for Human-Robot Interaction, a Workshop at ACM/IEEE HRI 2008; University of Hertfordshire: Hatfield, UK, 2008; pp. 61–68. [Google Scholar]
- Bravo Sanchez, F.; Correal, A.; Guerrero, E. Interactive Drama With Robots for Teaching Non-Technical Subjects. J. Hum. Robot. Interact. 2017, 6, 48. [Google Scholar] [CrossRef]
- Brown, L.; Howard, A. Engaging children in math education using a socially interactive humanoid robot. IEEE-RAS Int. Conf. Humanoid Robot. 2015, 2015, 183–188. [Google Scholar] [CrossRef]
- Bouker, J.; Scarlatos, A. Investigating the impact on fluid intelligence by playing N-Back games with a kinesthetic modality. In Proceedings of the 2013 10th International Conference and Expo on Emerging Technologies for a Smarter World (CEWIT), Melville, NY, USA, 21–22 October 2013; pp. 1–3. [Google Scholar] [CrossRef]
- Silva, M.P.; do Nascimento Silva, V.; Chaimowicz, L. Dynamic Difficulty Adjustment through an Adaptive AI. In Proceedings of the 14th Brazilian Symposium on Computer Games and Digital Entertainment, SBGames 2015, Piauí, Brazil, 11–13 November 2015; Rodrigues, M.A.F., de Carvalho, F.G., de Vasconcellos, M.S., Eds.; IEEE Computer Society: Piscataway, NJ, USA, 2015; pp. 173–182. [Google Scholar] [CrossRef]
- Araujo, V.; Mendez, D.; Gonzalez, A. A Novel Approach to Working Memory Training Based on Robotics and AI. Information 2019, 10, 350. [Google Scholar] [CrossRef] [Green Version]
- Mead, R.; Atrash, A.; Mataric, M.J. Automated Proxemic Feature Extraction and Behavior Recognition: Applications in Human-Robot Interaction. I. J. Soc. Robot. 2013, 5, 367–378. [Google Scholar] [CrossRef]
- Wood, L.J.; Robins, B.; Lakatos, G.; Syrdal, D.S.; Zaraki, A.; Dautenhahn, K. Developing a protocol and experimental setup for using a humanoid robot to assist children with autism to develop visual perspective taking skills. Paladyn 2019, 10, 167–179. [Google Scholar] [CrossRef]
- Frank, M.R.; Autor, D.; Bessen, J.E.; Brynjolfsson, E.; Cebrian, M.; Deming, D.J.; Feldman, M.; Groh, M.; Lobo, J.; Moro, E.; et al. Toward understanding the impact of artificial intelligence on labor. Proc. Natl. Acad. Sci. USA 2019, 116, 6531–6539. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vázquez, M.; Carter, E.J.; McDorman, B.; Forlizzi, J.; Steinfeld, A.; Hudson, S.E. Towards Robot Autonomy in Group Conversations: Understanding the Effects of Body Orientation and Gaze. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, HRI 2017, Vienna, Austria, 6–9 March 2017; Mutlu, B., Tscheligi, M., Weiss, A., Young, J.E., Eds.; ACM: New York, NY, USA, 2017; pp. 42–52. [Google Scholar] [CrossRef]
- De Graaf, M.M.A.; Malle, B.F. People’s Explanations of Robot Behavior Subtly Reveal Mental State Inferences. In Proceedings of the 14th ACM/IEEE International Conference on Human-Robot Interaction, HRI 2019, Daegu, Korea, 11–14 March 2019; pp. 239–248. [Google Scholar] [CrossRef]
- Torabi, F.; Warnell, G.; Stone, P. Adversarial Imitation Learning from State-Only Demonstrations. In Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems, Montreal, QC, Canada, 13–17 May 2019; International Foundation for Autonomous Agents and Multiagent Systems: Richland, SC, USA, 2019; pp. 2229–2231. [Google Scholar]
- Berinsky, A.J.; Huber, G.A.; Lenz, G.S. Evaluating Online Labor Markets for Experimental Research: Amazon.com’s Mechanical Turk. Political Anal. 2012, 20, 351–368. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.; Steed, A. A Comparison of Avatar-, Video-, and Robot-Mediated Interaction on Users’ Trust in Expertise. Front. Robot. AI 2016, 3, 12. [Google Scholar] [CrossRef] [Green Version]
- Takayama, L.; Pantofaru, C. Influences on Proxemic Behaviors in Human-Robot Interaction. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 5495–5502. [Google Scholar]
- Mead, R.; Mataric, M.J. A Probabilistic Framework for Autonomous Proxemic Control in Situated and Mobile Human-Robot Interaction. In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction; Association for Computing Machinery: New York, NY, USA, 2012; pp. 193–194. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Responsive Category | Emotional Expression | 0.5 m | 1 m | 1.5 m | 2 m | 2.5 m | 3 m | 3.5 m |
|---|---|---|---|---|---|---|---|---|
| Smile | 200 | 147 | 88 | 94 | 126 | 111 | 134 | |
| Win | Laugh | 41 | 79 | 116 | 139 | 108 | 86 | 77 |
| Winning gesture | 2 | 5 | 5 | 9 | 8 | 5 | 0 | |
| Total positive features | 243 | 231 | 209 | 242 | 242 | 202 | 211 | |
| Frown | 114 | 86 | 87 | 51 | 63 | 87 | 96 | |
| Loss | Closing eyes | 5 | 44 | 62 | 55 | 52 | 66 | 55 |
| Head down | 0 | 0 | 2 | 1 | 2 | 4 | 2 | |
| Total negative features | 119 | 130 | 151 | 107 | 117 | 157 | 153 |
| Responsive Category | Emotional Expression | 0.5 m | 1 m | 1.5 m | 2 m | 2.5 m | 3 m | 3.5 m |
|---|---|---|---|---|---|---|---|---|
| Smile | 135 | 124 | 150 | 171 | 89 | 99 | 123 | |
| Win | Laugh | 54 | 72 | 105 | 94 | 83 | 85 | 59 |
| Winning gesture | 6 | 6 | 8 | 4 | 5 | 0 | 3 | |
| Total positive features | 195 | 202 | 263 | 269 | 177 | 184 | 185 | |
| Frown brown | 117 | 105 | 36 | 24 | 116 | 114 | 126 | |
| Loss | Closing eyes | 39 | 49 | 57 | 63 | 62 | 57 | 45 |
| Head down | 6 | 2 | 2 | 2 | 4 | 3 | 3 | |
| Total negative features | 162 | 156 | 95 | 89 | 182 | 174 | 174 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Liu, Y.; Gao, X.-Z. Impacts of Human Robot Proxemics on Human Concentration-Training Games with Humanoid Robots. Healthcare 2021, 9, 894. https://doi.org/10.3390/healthcare9070894
Liu L, Liu Y, Gao X-Z. Impacts of Human Robot Proxemics on Human Concentration-Training Games with Humanoid Robots. Healthcare. 2021; 9(7):894. https://doi.org/10.3390/healthcare9070894
Chicago/Turabian StyleLiu, Li, Yangguang Liu, and Xiao-Zhi Gao. 2021. "Impacts of Human Robot Proxemics on Human Concentration-Training Games with Humanoid Robots" Healthcare 9, no. 7: 894. https://doi.org/10.3390/healthcare9070894