Real-Time and Embedded Detection of Hand Gestures with an IMU-Based Glove †



Abstract
:1. Introduction
2. Related Work
3. System Design
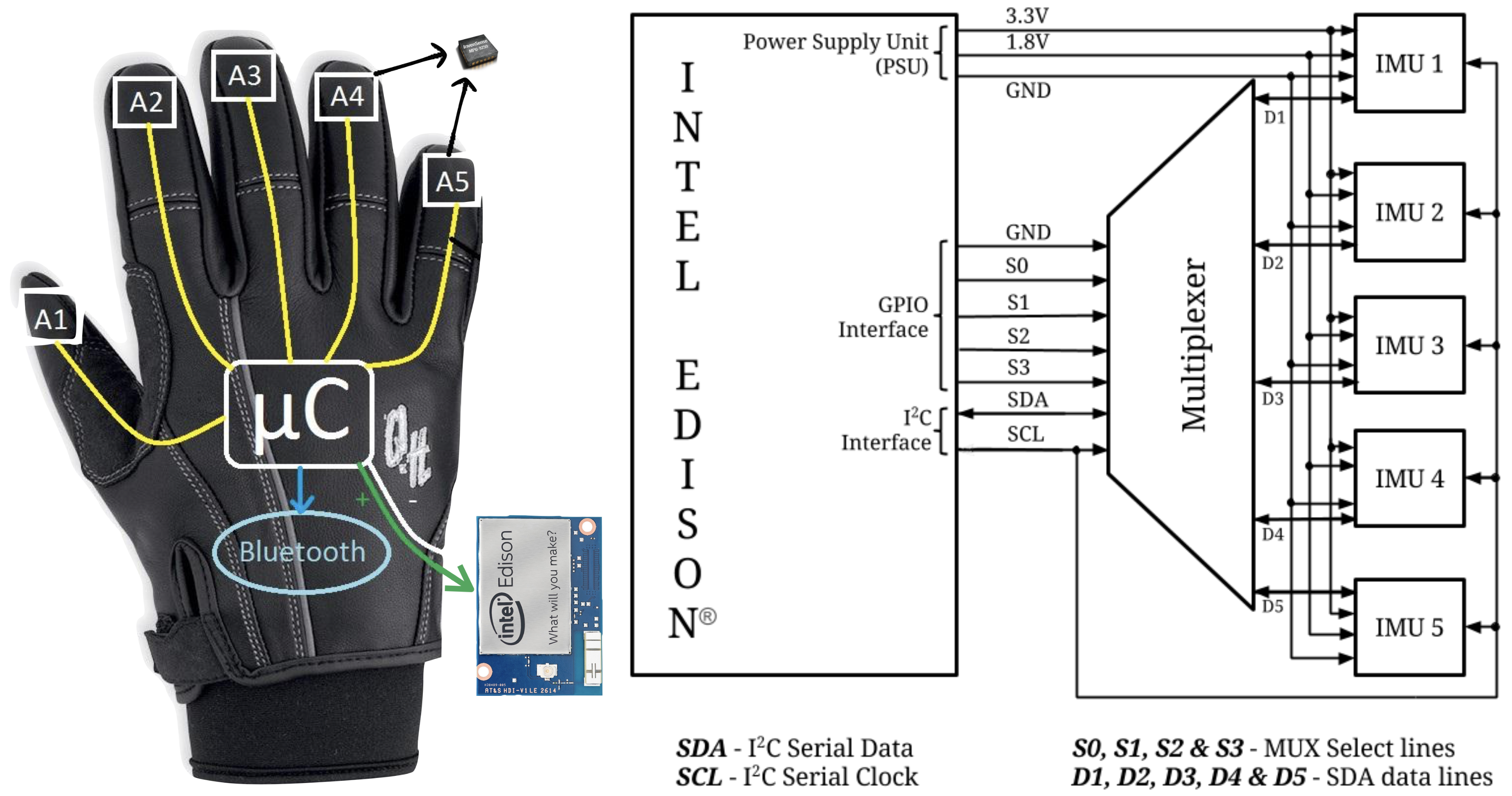
3.1. Hardware Design
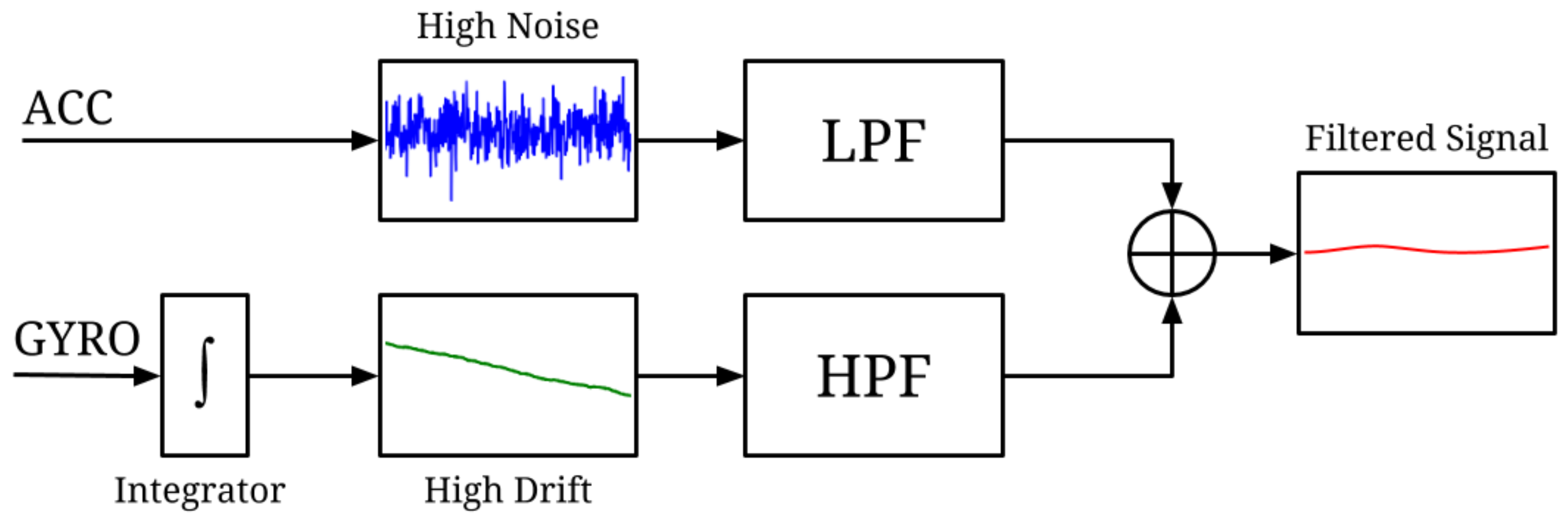
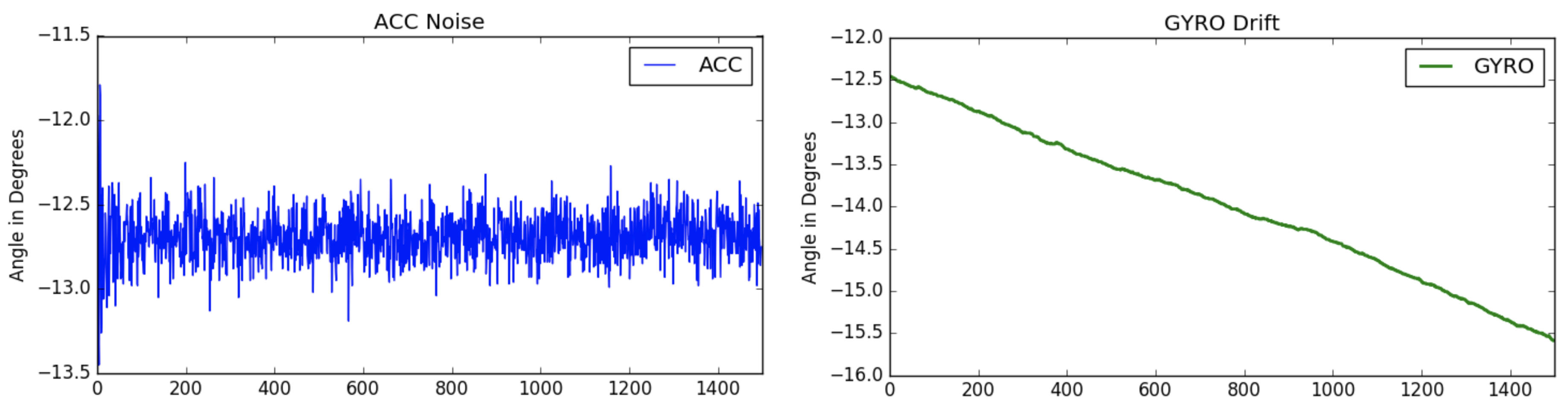
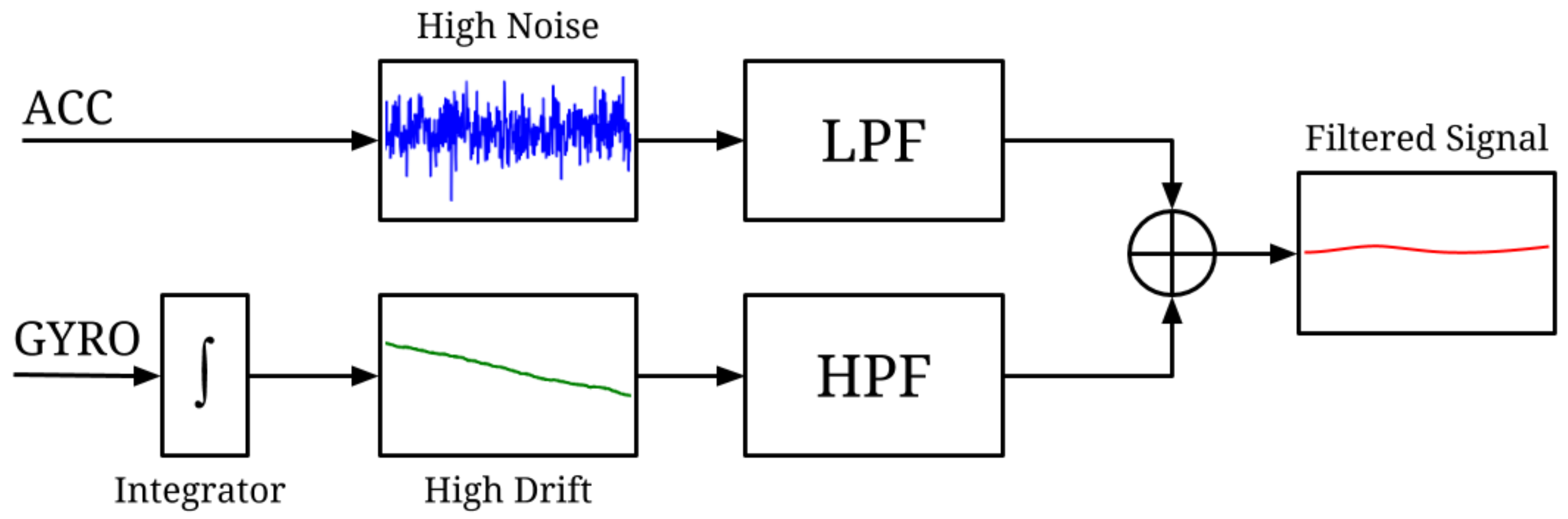
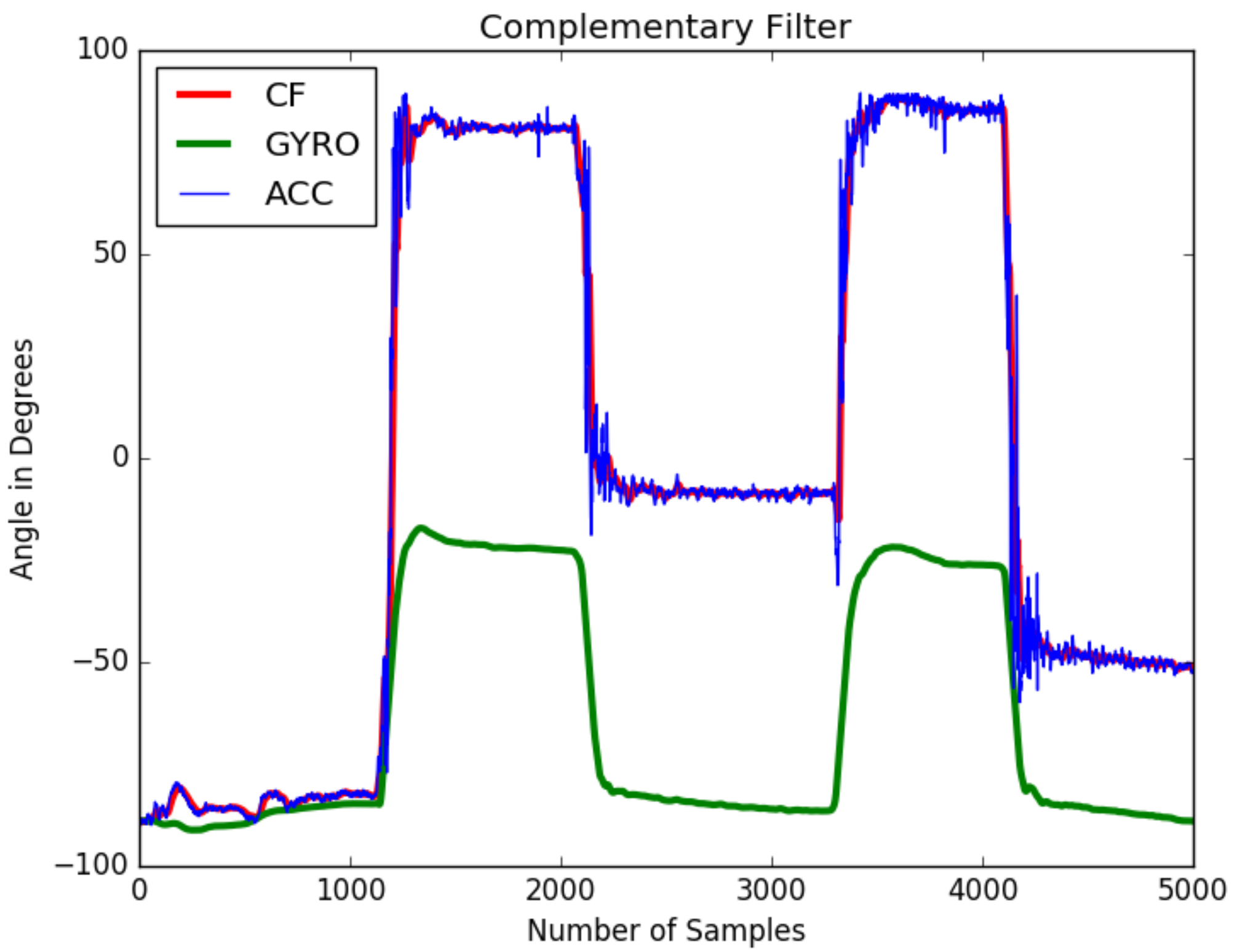
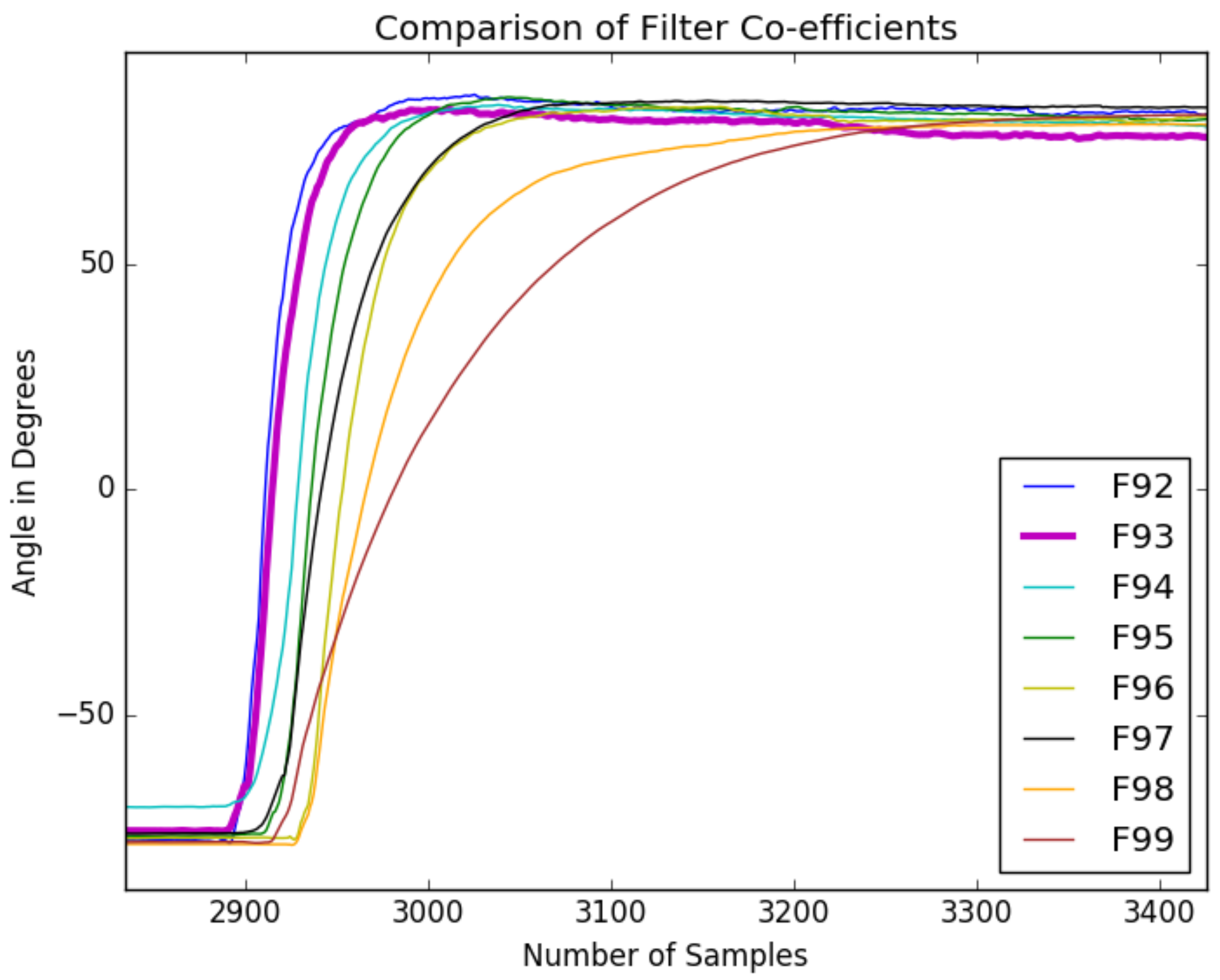
3.2. Sensor Fusion Approach
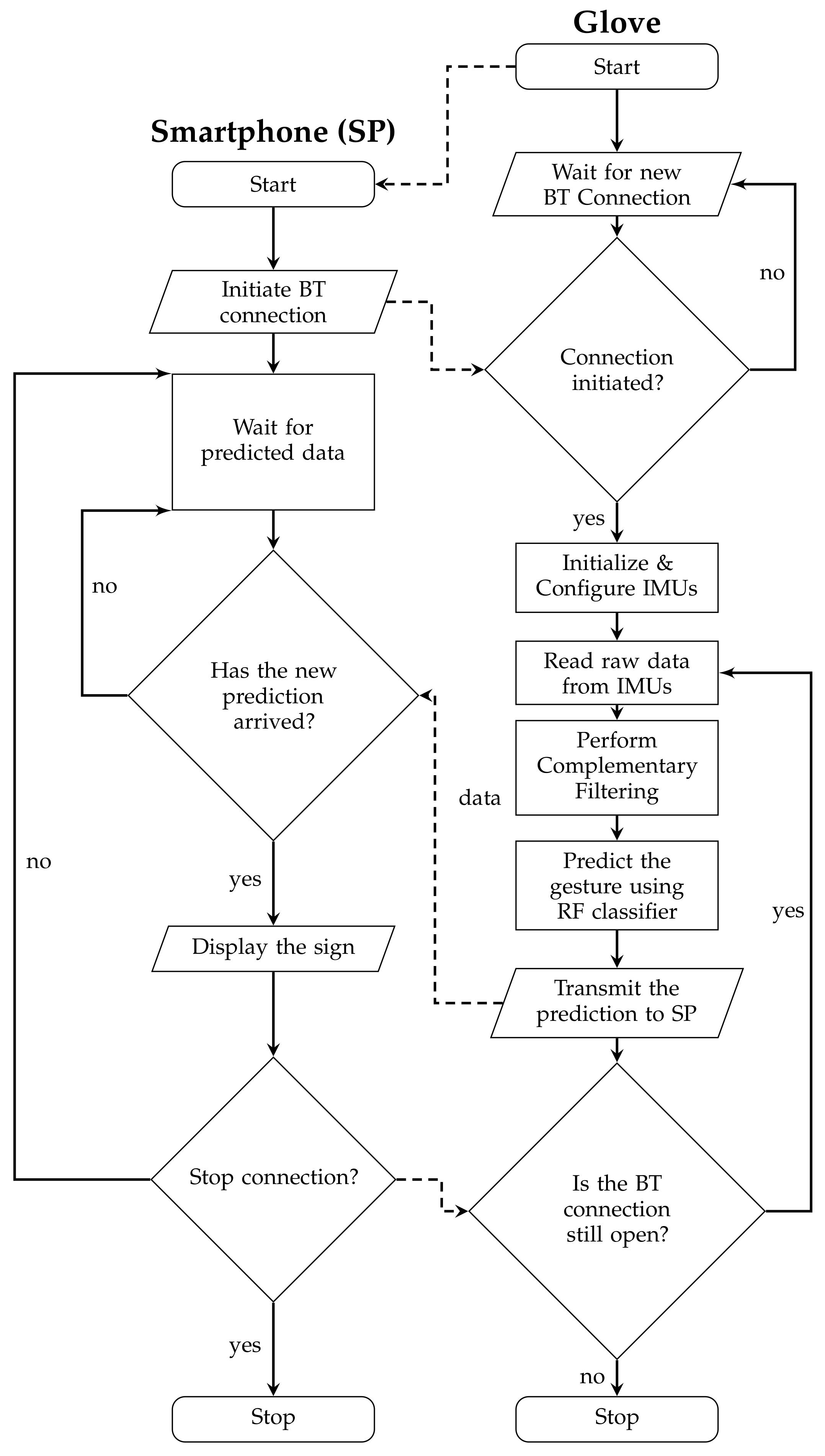
3.3. Data Communication and Interface Design
- Step 1:
- The glove acts as a server and waits for a Bluetooth-enabled device to initialize the program. Thereafter, the smartphone can connect to the glove and will wait for the first set of predicted data.
- Step 2:
- After the connection prompt, the glove starts to initialize and configure the IMUs.
- Step 3:
- Once the sensors are set, the raw data (ACC & GYRO) for each finger is read in cyclic manner.
- Step 4:
- The sampling time to fetch the readings from each IMU is measured precisely and the CF is performed.
- Step 5:
- The sensor-fused data from the above step is fed to RF classifier to predict the gesture from the obtained readings.
- Step 6:
- The corresponding sign of the predicted gesture is transmitted to the smartphone via Bluetooth.
- Step 7:
- Smartphone displays the currently received sign if it is not same as the previous one.
- Step 8:
- This cycle is repeated indefinitely until the connection is terminated by the smartphone.
4. Evaluation
4.1. Experiment Scope and Goals
4.2. Data Collection and Experiment Design
4.3. Classification Algorithms, Parameters, and Performance
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mummadi, C.K.; Leo, F.P.P.; Verma, K.D.; Kasireddy, S.; Scholl, P.M.; Laerhoven, K.V. Real-time Embedded Recognition of Sign Language Alphabet Fingerspelling in an IMU-Based Glove. In Proceedings of the 4th international Workshop on Sensor-based Activity Recognition and Interaction—iWOAR, Rostock, Germany, 21–22 September 2017. [Google Scholar]
- Dipietro, L.; Sabatini, A.M.; Dario, P. A survey of glove-based systems and their applications. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2008, 38, 461–482. [Google Scholar] [CrossRef]
- Sturman, D.J.; Zeltzer, D. A survey of glove-based input. IEEE Comput. Graph. Appl. 1994, 14, 30–39. [Google Scholar] [CrossRef]
- Zimmerman, T.G.; Lanier, J.; Blanchard, C.; Bryson, S.; Harvill, Y. A Hand Gesture Interface Device. In Proceedings of the SIGCHI/GI Conference on Human Factors in Computing Systems and Graphics Interface, Toronto, CA, USA, 5–9 April 1987; pp. 189–192. [Google Scholar]
- Cabrera, M.E.; Bogado, J.M.; Fermin, L.; Acuna, R.; Ralev, D. Glove-based gesture recognition system. In Proceedings of the 15th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Baltimore, MD, USA, 23–26 July 2012; pp. 747–753. [Google Scholar]
- Vutinuntakasame, S.E.A. An assistive body sensor network glove for speech-and hearing-impaired disabilities. In Proceedings of the IEEE 2011 International Conference on Body Sensor Networks (BSN), Dallas, TX, USA, 23–25 May 2011; pp. 7–12. [Google Scholar]
- Tanyawiwat, N.; Thiemjarus, S. Design of an assistive communication glove using combined sensory channels. In Proceedings of the 2012 Ninth International IEEE Conference on Wearable and Implantable Body Sensor Networks (BSN), London, UK, 9–12 May 2012; pp. 34–39. [Google Scholar]
- Hein, A.; Kirste, T. A Hybrid Approach for Recognizing ADLs and Care Activities Using Inertial Sensors and RFID. In Proceedings of the 5th International on Conference Universal Access in Human-Computer Interaction, Intelligent and Ubiquitous Interaction Environments (UAHCI ’09), San Diego, CA, USA, 19–24 July 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 178–188. [Google Scholar]
- Zinnen, A.; van Laerhoven, K.; Schiele, B. Toward Recognition of Short and Non-repetitive Activities from Wearable Sensors. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2007; pp. 142–158. [Google Scholar]
- Kuroda, T.; Tabata, Y.; Goto, A.; Ikuta, H.; Murakami, M. Consumer price data-glove for sign language recognition. In Proceedings of the 5th International Conference on Disability, Virtual Reality and Associated Technologies (ICDVRAT 2004), Oxford, UK, 20–22 September 2004; pp. 253–258. [Google Scholar]
- Khambaty, Y.; Quintana, R.; Shadaram, M.; Nehal, S.; Virk, M.A.; Ahmed, W.; Ahmedani, G. Cost effective portable system for sign language gesture recognition. In Proceedings of the IEEE International Conference on System of Systems Engineering (SoSE ’08), Singapore, 2–4 June 2008; pp. 1–6. [Google Scholar]
- Huang, Y.; Monekosso, D.; Wang, H.; Augusto, J.C. A concept grounding approach for glove-based gesture recognition. In Proceedings of the 7th IEEE International Conference on Intelligent Environments (IE), Nottingham, UK, 25–28 July 2011; pp. 358–361. [Google Scholar]
- Huang, Y.; Monekosso, D.; Wang, H. Clustering ensembles based on multi-classifier fusion. In Proceedings of the 2010 IEEE International Conference on Intelligent Computing and Intelligent Systems (ICIS), Xiamen, China, 29–31 October 2010; Volume 3, pp. 393–397. [Google Scholar]
- Jeong, E.; Lee, J.; Kim, D. Finger-gesture recognition glove using velostat (ICCAS 2011). In Proceedings of the 2011 11th IEEE International Conference on Control, Automation and Systems (ICCAS), Gyeonggi-do, South Korea, 26–29 October 2011; pp. 206–210. [Google Scholar]
- Park, Y.; Lee, J.; Bae, J. Development of a finger motion measurement system using linear potentiometers. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 125–130. [Google Scholar]
- Kadam, K.; Ganu, R.; Bhosekar, A.; Joshi, S. American Sign Language Interpreter. In Proceedings of the 2012 IEEE Fourth International Conference on Technology for Education, Hyderabad, India, 18–20 July 2012; pp. 157–159. [Google Scholar]
- Perng, J.K.; Fisher, B.D.; Hollar, S.; Pister, K.S.J. Acceleration Sensing Glove (ASG). In Proceedings of the Third International Symposium on Wearable Computers (ISWC 1999), San Francisco, CA, USA, 18–19 October 1999; pp. 178–180. [Google Scholar]
- Wu, J.; Gao, W.; Song, Y.; Liu, W.; Pang, B. A simple sign language recognition system based on data glove. In Proceedings of the 1998 Fourth IEEE International Conference on Signal Processing Proceedings (ICSP’98), Beijing, China, 12–16 October 1998; Volume 2, pp. 1257–1260. [Google Scholar]
- Hrabia, C.E.; Wolf, K.; Wilhelm, M. Whole hand modeling using 8 wearable sensors: Biomechanics for hand pose prediction. In Proceedings of the 4th Augmented Human International Conference, New York, NY, USA, 7–8 March 2013; pp. 21–28. [Google Scholar]
- Tubaiz, N.; Shanableh, T.; Assaleh, K. Glove-based continuous Arabic sign language recognition in user-dependent mode. IEEE Trans. Hum. Mach. Syst. 2015, 45, 526–533. [Google Scholar] [CrossRef]
- Kim, J.; Wagner, J.; Rehm, M.; André, E. Bi-channel sensor fusion for automatic sign language recognition. In Proceedings of the 2008 8th IEEE International Conference on Automatic Face & Gesture Recognition, Amsterdam, The Netherlands, 17–19 September 2008; pp. 1–6. [Google Scholar]
- Brashear, H.; Starner, T.; Lukowicz, P.; Junker, H. Using Multiple Sensors for Mobile Sign Language Recognition; ISWC 2003; IEEE Press: New York, NY, USA, 2003. [Google Scholar]
- Oz, C.; Leu, M.C. Linguistic properties based on American Sign Language isolated word recognition with artificial neural networks using a sensory glove and motion tracker. Neurocomputing 2007, 70, 2891–2901. [Google Scholar] [CrossRef]
- Georgi, M.; Amma, C.; Schultz, T. Recognizing Hand and Finger Gestures with IMU Based Motion and EMG Based Muscle Activity Sensing. In Proceedings of the International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2015), Lisbon, Portugal, 12–15 January 2015; SCITEPRESS—Science and Technology Publications, Lda: Setúbal, Portugal, 2015; Volume 4, pp. 99–108. [Google Scholar]
- Gong, J.; Yang, X.D.; Irani, P. WristWhirl: One-handed Continuous Smartwatch Input Using Wrist Gestures. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology (UIST ’16), Tokyo, Japan, 16–19 October 2016; pp. 861–872. [Google Scholar]
- Gui, P.; Tang, L.; Mukhopadhyay, S. MEMS Based IMU for Tilting Measurement: Comparison of Complementary and Kalman Filter Based Data Fusion. In Proceedings of the 2015 10th IEEE Conference on Industrial Electronics and Applications (ICIEA 2015), Auckland, New Zealand, 15–17 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2004–2009. [Google Scholar]
- Hammerla, N.Y.; Ploetz, T. Let’s (Not) Stick Together: Pairwise Similarity Biases Cross-validation in Activity Recognition. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp ’15), Osaka, Japan, 7–11 September 2015; pp. 1041–1051. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classifier | Parameters | Training Time (Seconds/Fold ) | Testing Time (Seconds/Sample) | Accuracy (%) | F1 Score (%) |
|---|---|---|---|---|---|
| Naive Bayes | - | 2.2 | 0.002 | 89.1 | 87 |
| No.of layers | |||||
| MLP | 2 layers with 50–50 units and final layer with 10 classes | 3144.8 | 0.16 | 90.9 | 89.7 |
| 2 layers with 100–50 units and final layer with 10 classes | 3630 | 0.19 | 91.8 | 90.3 | |
| 2 layers with 150–50 units and final layer with 10 classes | 3860 | 0.23 | 92.2 | 91.1 | |
| No. of sub-trees | |||||
| RF | 5 | 20 | 0.12 | 90.3 | 89.0 |
| 10 | 50 | 0.13 | 92.3 | 91.3 | |
| 15 | 105 | 0.14 | 92.95 | 91.98 | |
| A | B | C | D | E | F | G | H | I | K | L | M | N | O | Q | R | S | T | U | V | W | X | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 986.63 | 0 | 0.02 | 0 | 0 | 0.54 | 0 | 0 | 12.25 | 0.56 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| B | 0 | 900.46 | 16.86 | 22.35 | 56.68 | 0.32 | 0 | 0 | 0.05 | 0 | 0 | 0.09 | 0 | 0 | 0.42 | 0 | 0.02 | 0.19 | 0 | 1.25 | 0 | 1.32 |
| C | 0.02 | 1.58 | 978.89 | 0.79 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.04 | 1.05 | 0.14 | 0 | 17.49 | 0 | 0 |
| D | 0 | 9.51 | 1.79 | 953.98 | 34.32 | 0.32 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.02 | 0.07 | 0 | 0 | 0 | 0 |
| E | 0 | 33.21 | 0.11 | 36.7 | 928.79 | 0.88 | 0 | 0.02 | 0 | 0.26 | 0 | 0.04 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| F | 12.84 | 13.56 | 0.05 | 0.21 | 0.79 | 754.32 | 0.51 | 0 | 13.67 | 0 | 0.05 | 0 | 0 | 0 | 1.54 | 11.07 | 3.33 | 183.19 | 0 | 3.44 | 0.04 | 1.39 |
| G | 0.02 | 0.07 | 0 | 0.11 | 0 | 0.37 | 998.67 | 0.35 | 0.04 | 0 | 0.05 | 0 | 0 | 0 | 0 | 0 | 0 | 0.26 | 0.05 | 0 | 0 | 0.02 |
| H | 0 | 0.05 | 0 | 0 | 1.49 | 0 | 0.74 | 893.67 | 3.93 | 0 | 0 | 94.3 | 3.56 | 0 | 2.26 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| I | 35.33 | 0.16 | 0 | 0 | 0.21 | 4.05 | 0 | 0.61 | 956.21 | 0.02 | 0 | 0 | 0.04 | 0 | 0.05 | 0 | 0 | 3.32 | 0 | 0 | 0 | 0 |
| K | 0.86 | 0 | 0 | 0.04 | 0 | 0.05 | 0 | 0 | 0.19 | 993.35 | 0.04 | 0 | 0 | 0 | 0.02 | 5.35 | 0 | 0.05 | 0 | 0.04 | 0.02 | 0 |
| L | 0.09 | 0 | 0 | 0.04 | 0.02 | 0.04 | 0 | 0 | 1.09 | 0.23 | 791.82 | 0 | 0 | 0 | 0 | 0 | 0 | 0.02 | 206.54 | 0.09 | 0 | 0.04 |
| M | 0 | 0 | 0 | 0 | 1.28 | 0 | 0 | 23.16 | 0.04 | 0.02 | 0.72 | 932.30 | 38.56 | 0 | 3.75 | 0.02 | 0 | 0 | 0.16 | 0 | 0 | 0 |
| N | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2.54 | 0 | 0 | 0 | 34.6 | 961.51 | 0.07 | 1.28 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| O | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.02 | 0 | 0.02 | 0 | 0.16 | 1.23 | 996.33 | 2.25 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Q | 0 | 4.7 | 0.02 | 0 | 0 | 0.07 | 0 | 0.84 | 11.32 | 0 | 0 | 10.84 | 8.65 | 1.07 | 962.33 | 0.12 | 0 | 0.02 | 0 | 0.02 | 0 | 0 |
| R | 2.74 | 0.18 | 0 | 0 | 0 | 64.82 | 0.12 | 0 | 0 | 19.53 | 0.12 | 0 | 0 | 0 | 0.05 | 897.40 | 0.89 | 13.82 | 0.02 | 0 | 0.3 | 0 |
| S | 0 | 0.51 | 43.86 | 0 | 0 | 0.47 | 0 | 0 | 0 | 1.67 | 0 | 0.65 | 0.02 | 0 | 0.11 | 13.35 | 933.93 | 1.98 | 0 | 0 | 3.46 | 0 |
| T | 0 | 10.19 | 0.16 | 0.23 | 0 | 163.46 | 3.91 | 0 | 25.82 | 5.96 | 0.02 | 0 | 0 | 0 | 0.04 | 21.26 | 11.86 | 752.79 | 0.02 | 0 | 3.02 | 1.26 |
| U | 0 | 0 | 0 | 0 | 0 | 0.67 | 0 | 0 | 0.12 | 0.19 | 236.28 | 0 | 0 | 0 | 0.02 | 0.18 | 0 | 0.68 | 761.77 | 0.09 | 0 | 0 |
| V | 0 | 1.58 | 5.89 | 0 | 0 | 0.07 | 0 | 0 | 0 | 0.04 | 0.58 | 0.02 | 0 | 0 | 0 | 0.04 | 0 | 0 | 0.58 | 987.46 | 3.75 | 0 |
| W | 0.04 | 0.14 | 1.25 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.07 | 0.07 | 0.05 | 0 | 0.86 | 994.65 | 2.88 |
| X | 0 | 4.63 | 0 | 0 | 0 | 0.58 | 0 | 0 | 0.02 | 0 | 0 | 0 | 0 | 0 | 0 | 0.05 | 0 | 0 | 0 | 0 | 1 | 993.72 |
| A | B | C | D | E | F | G | H | I | K | L | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| acc | 98.6 | 90.0 | 97.8 | 95.3 | 92.8 | 75.4 | 99.8 | 89.3 | 95.6 | 99.3 | 79.1 |
| 0.0632 | 0.2526 | 0.0875 | 0.1703 | 0.1712 | 0.3156 | 0.0026 | 0.2070 | 0.1390 | 0.0241 | 0.3162 | |
| M | N | O | Q | R | S | T | U | V | W | X | |
| acc | 93.2 | 96.1 | 99.6 | 96.2 | 89.7 | 93.3 | 75.2 | 76.1 | 98.7 | 99.4 | 99.3 |
| 0.1019 | 0.1043 | 0.0102 | 0.1463 | 0.2677 | 0.1972 | 0.3674 | 0.3304 | 0.0502 | 0.0200 | 0.0326 |
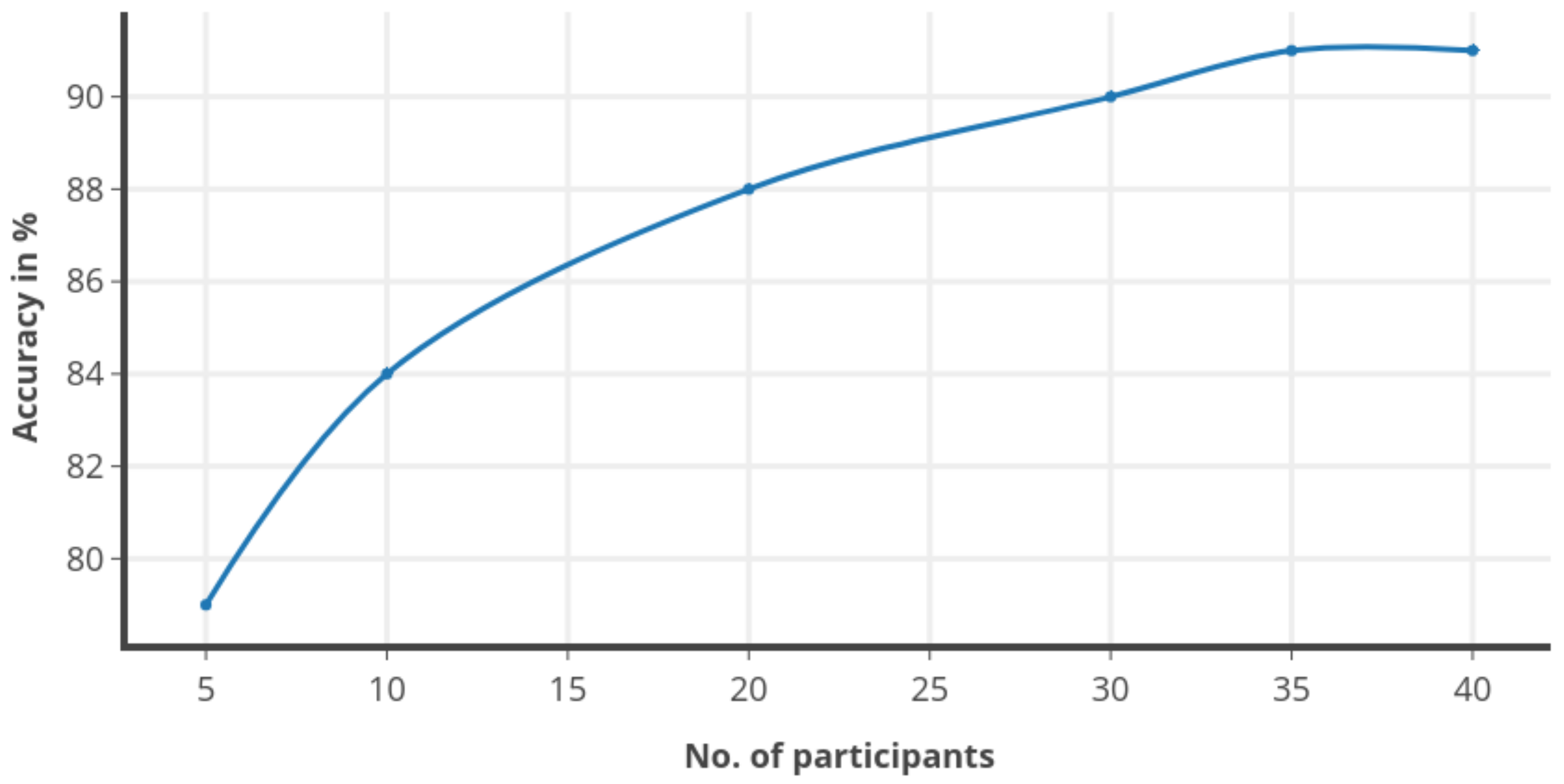
| No. of Participants | Accuracy in % | No. of Participants | Accuracy in % | ||
|---|---|---|---|---|---|
| 5 | 79 | 0.02 | 30 | 90 | 0.0055 |
| 10 | 84 | 0.0141 | 35 | 91 | 0.0025 |
| 20 | 88 | 0.011 | 40 | 91 | 0.0024 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mummadi, C.K.; Leo, F.P.P.; Verma, K.D.; Kasireddy, S.; Scholl, P.M.; Kempfle, J.; Laerhoven, K.V. Real-Time and Embedded Detection of Hand Gestures with an IMU-Based Glove. Informatics 2018, 5, 28. https://doi.org/10.3390/informatics5020028
Mummadi CK, Leo FPP, Verma KD, Kasireddy S, Scholl PM, Kempfle J, Laerhoven KV. Real-Time and Embedded Detection of Hand Gestures with an IMU-Based Glove. Informatics. 2018; 5(2):28. https://doi.org/10.3390/informatics5020028
Chicago/Turabian StyleMummadi, Chaithanya Kumar, Frederic Philips Peter Leo, Keshav Deep Verma, Shivaji Kasireddy, Philipp M. Scholl, Jochen Kempfle, and Kristof Van Laerhoven. 2018. "Real-Time and Embedded Detection of Hand Gestures with an IMU-Based Glove" Informatics 5, no. 2: 28. https://doi.org/10.3390/informatics5020028