
RUL Prediction of Switched Mode Power Supply Using a Kalman Filter Assisted Deep Neural Network




Abstract
:1. Introduction
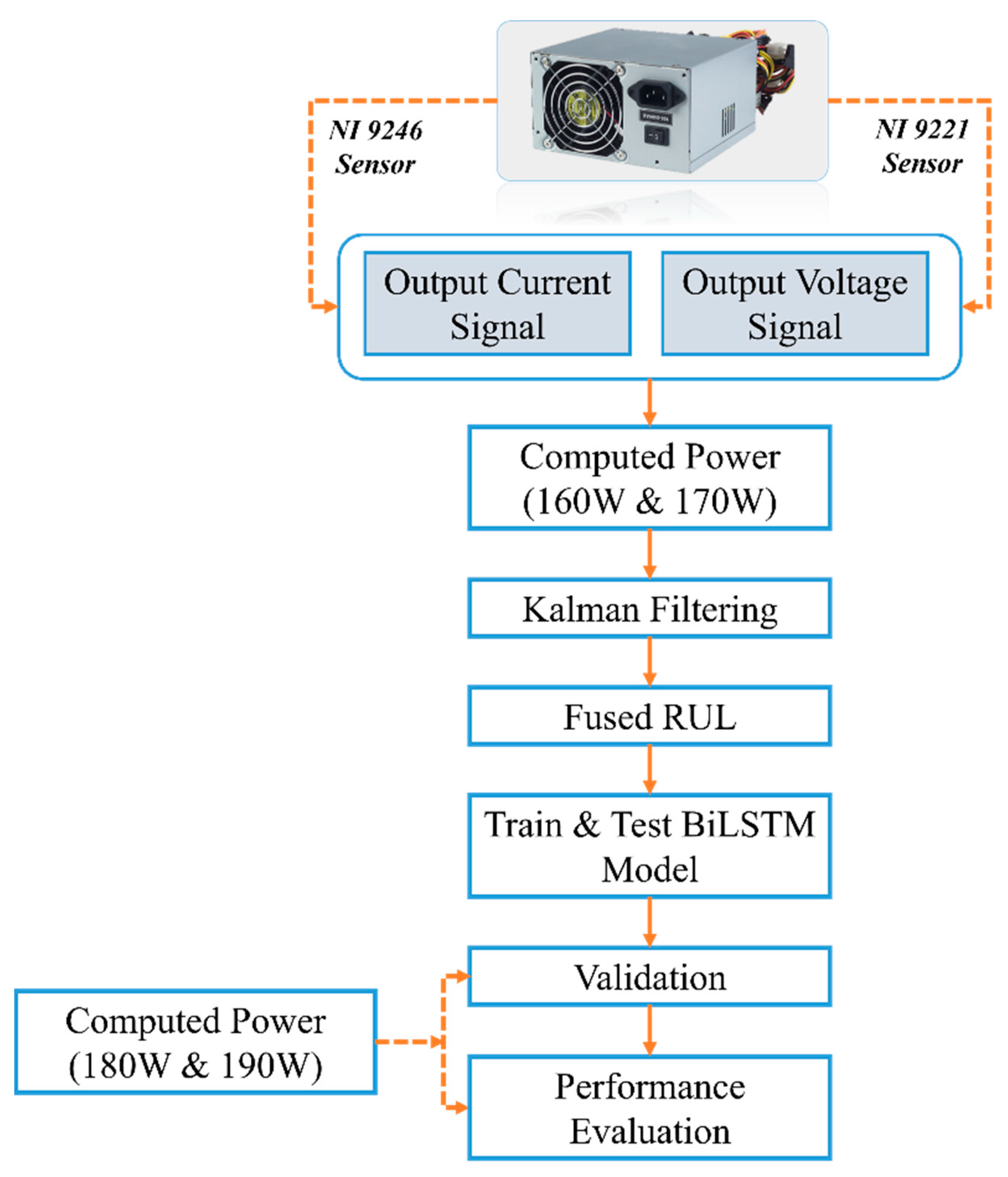
- Proposal of an integrated sensor condition monitoring framework that consists of voltage and current signals for a proper SMPS RUL prediction. An accelerated aging test was designed for the SMPS to analyze the degradation at various electrical loading;
- Proposal of EKF based filtering for RUL prediction. Compared with other statistical tools, EKF can effectively describe the random structure of experimental measurements, with its selection coming from the ability to solve nonlinear estimation and its low computational cost;
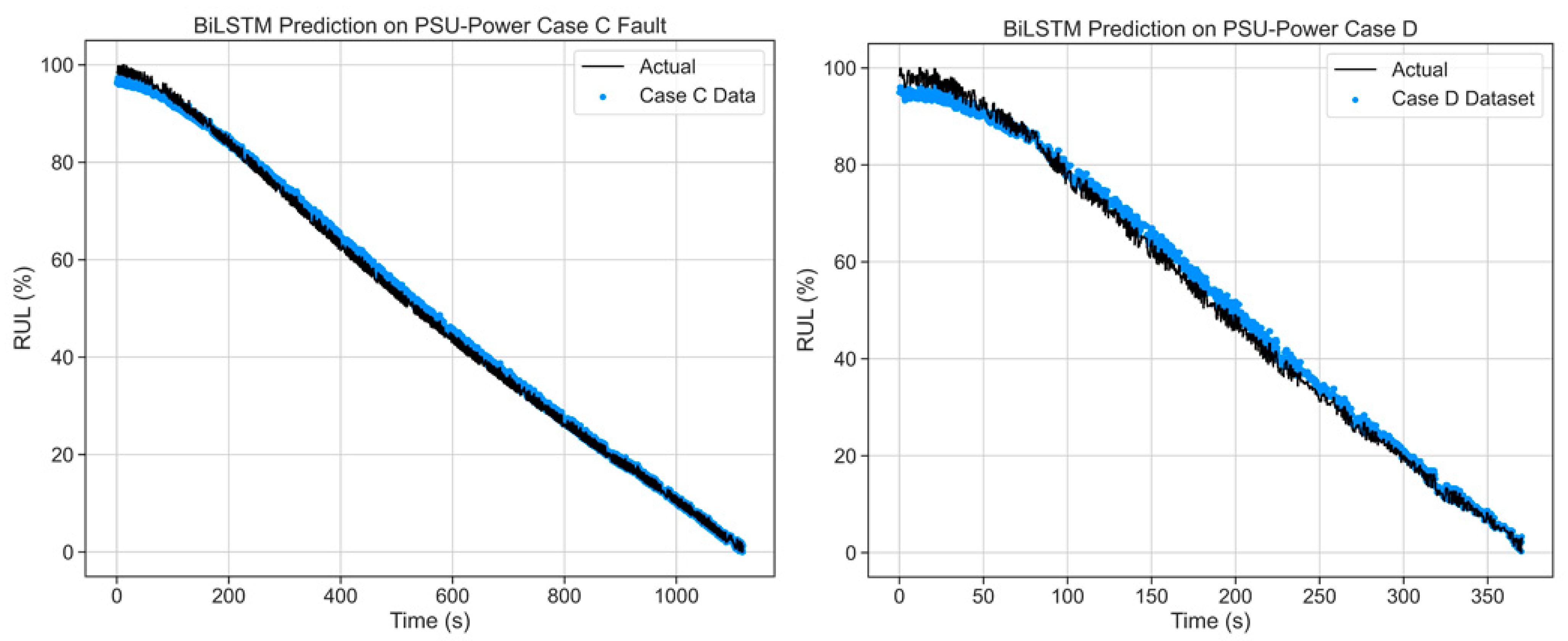
- Validation of the EKF-BiLSTM model which shows the accurate RUL prediction.
2. Motivation and Literature Review
3. Theoretical Overview
3.1. Extended Kalman Filter
3.2. Short-Time Fourier Transform (STFT)
3.3. Explanation of LSTM and BiLSTM
3.4. Proposed BiLSTM Model
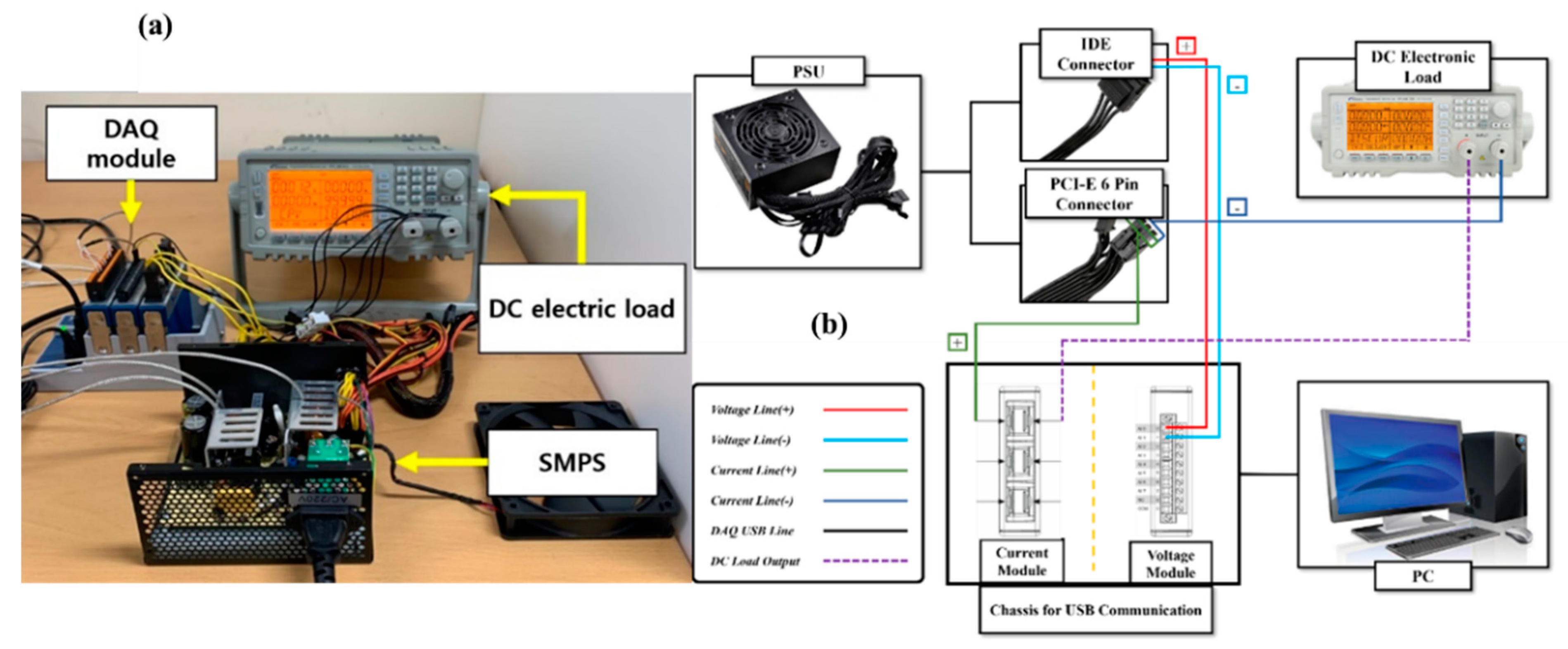
4. Experimental Test Bench
Data Acquisition and Fault Classification
5. Results and Discussion
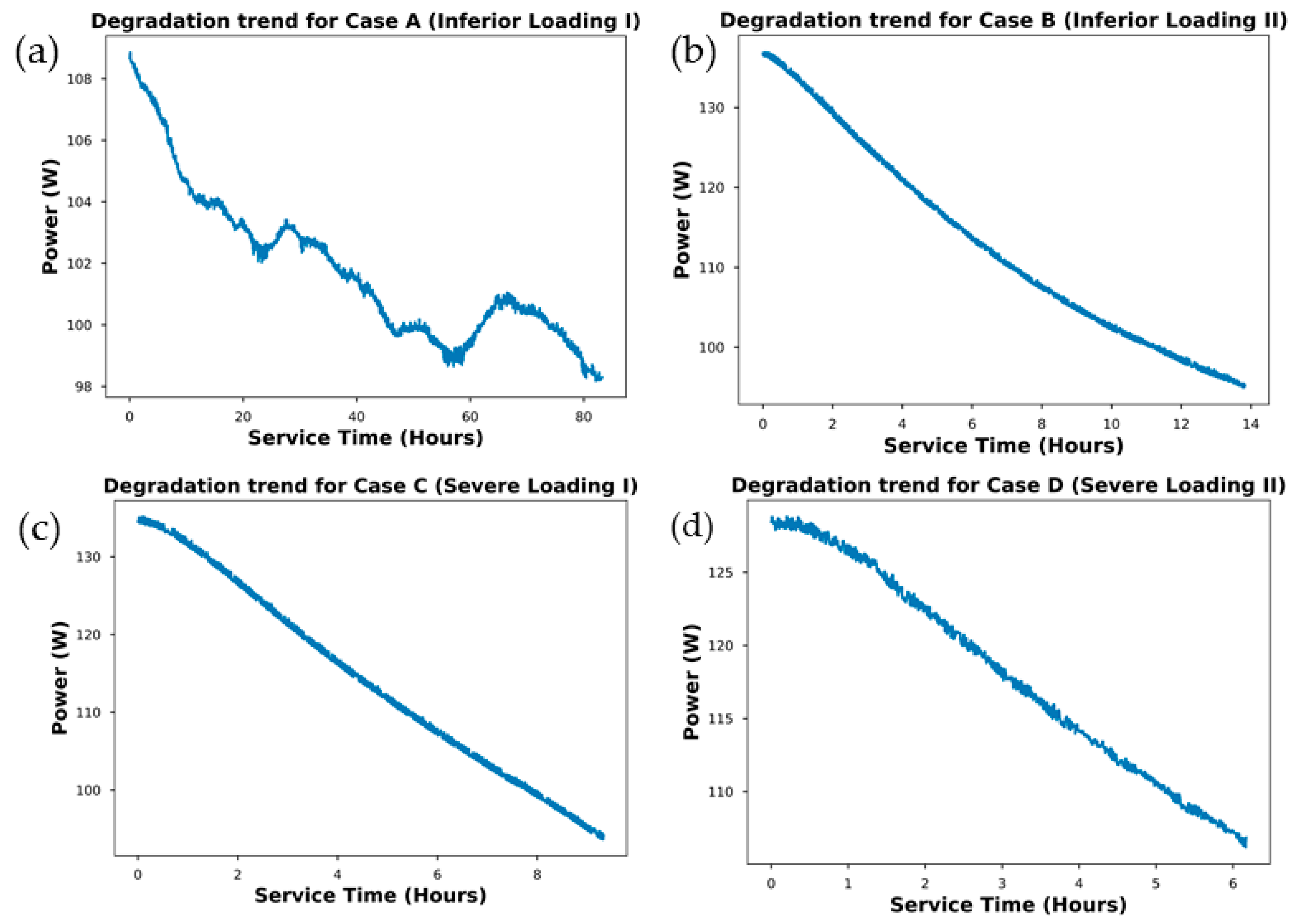
5.1. Degradation Data
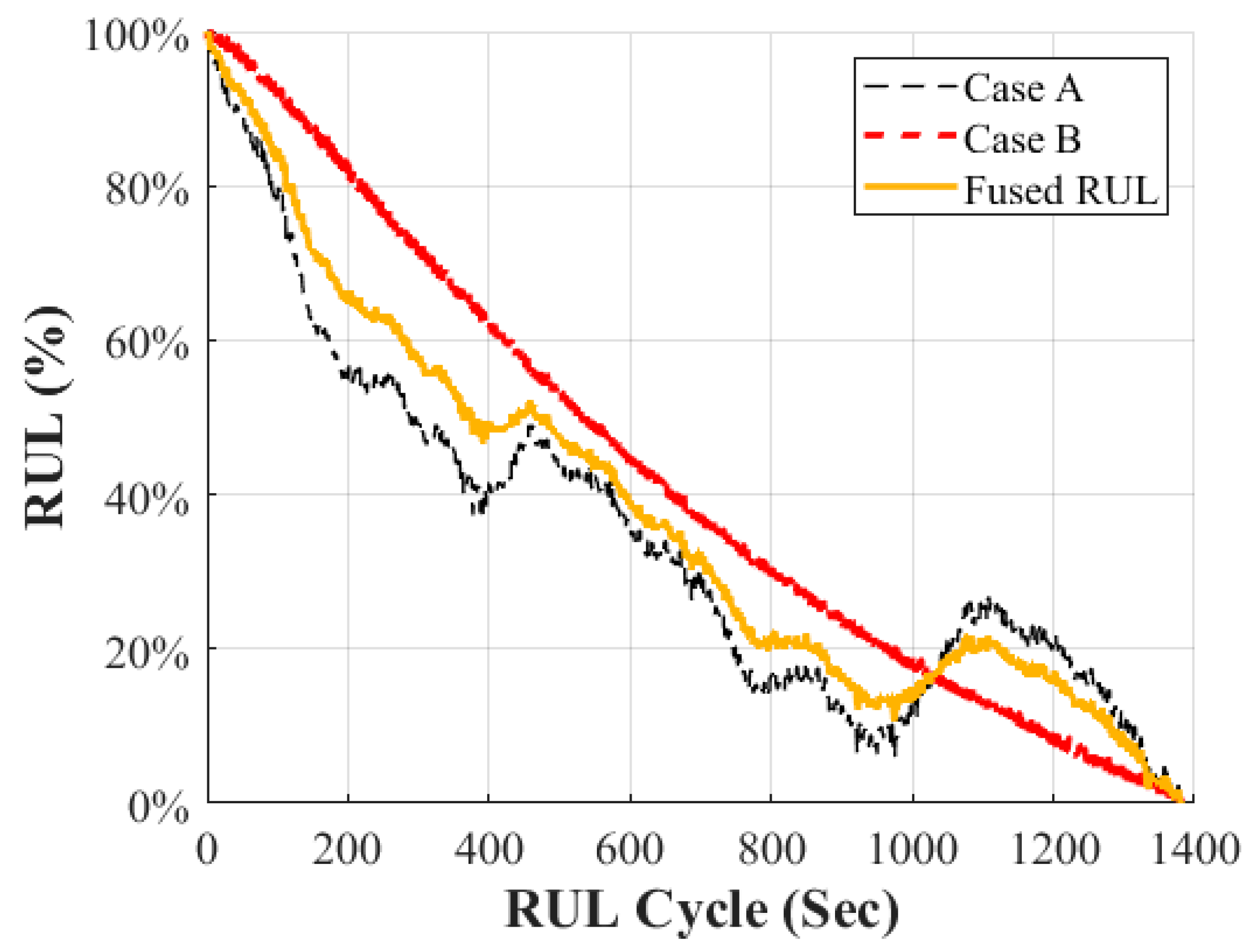
5.2. RUL Estimation
5.3. Performance Evaluation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kareem, A.B.; Akpudo, U.E.; Hur, J.-W. An Integrated Cost-Aware Dual Monitoring Framework for SMPS Switching Device Diagnosis. Electronics 2021, 10, 2487. [Google Scholar] [CrossRef]
- Wang, C.; Ji, T.; Mao, F.; Wang, Z.; Li, Z. Prognostics and Health Management System for Electric Vehicles with a Hierarchy Fusion Framework: Concepts, Architectures, and Methods. Adv. Civ. Eng. 2021, 2021, 6685900. [Google Scholar] [CrossRef]
- Jigyasu, R.; Shrivastava, V.; Singh, S. Smart classifier based prognostics and health management of induction motor. Mater. Today Proc. 2021, 43, 355–361. [Google Scholar] [CrossRef]
- Alam Shifat, T.; Jang-Wook, H. Remaining Useful Life Estimation of BLDC Motor Considering Voltage Degradation and Attention-Based Neural Network. IEEE Access 2020, 8, 168414–168428. [Google Scholar] [CrossRef]
- Zhong, J.; Wang, D.; Guo, J.; Cabrera, D.; Li, C. Theoretical Investigations on Kurtosis and Entropy and Their Improvements for System Health Monitoring. IEEE Trans. Instrum. Meas. 2021, 70, 3503710. [Google Scholar] [CrossRef]
- Long, J.; Sun, Z.; Li, C.; Hong, Y.; Bai, Y.; Zhang, S. A Novel Sparse Echo Autoencoder Network for Data-Driven Fault Diagnosis of Delta 3-D Printers. IEEE Trans. Instrum. Meas. 2019, 69, 683–692. [Google Scholar] [CrossRef]
- Zhao, X.; Kim, J.; Warns, K.; Wang, X.; Ramuhalli, P.; Cetiner, S.; Kang, H.G.; Golay, M. Prognostics and Health Management in Nuclear Power Plants: An Updated Method-Centric Review with Special Focus on Data-Driven Methods. Front. Energy Res. 2021, 9, 696785. [Google Scholar] [CrossRef]
- Prisacaru, A.; Gromala, P.J.; Han, B.; Zhang, G. Degradation Estimation and Prediction of Electronic Packages using Data Driven Approach. IEEE Trans. Ind. Electron. 2021, 69, 2996–3006. [Google Scholar] [CrossRef]
- Abuelnaga, A.; Narimani, M.; Bahman, A.S. Power electronic converter reliability and prognosis review focusing on power switch module failures. J. Power Electron. 2021, 21, 865–880. [Google Scholar] [CrossRef]
- Meng, L.; Pecht, M.; Liu, J.; Wang, Y.; Cheng, K. Health Monitoring of IGBTs with a Rule-Based Sub-safety Recognition Model Using Neural Networks. J. Progn. Health Manag. 2020, 1, 64–85. [Google Scholar] [CrossRef]
- Li, D.; Li, X. Study of Degradation in Switching Mode Power Supply Based on the Theory of PoF. In Proceedings of the 2012 International Conference on Computer Science and Service System, Nanjing, China, 11–13 August 2012; pp. 1976–1980. [Google Scholar]
- Xiaozhi, L.; Peihong, L.; Yinghua, Y. Remaining Useful Life Prognostics Based on Deep Combined Temporal Bidirectional Convolutional Network. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 4604–4609. [Google Scholar] [CrossRef]
- Barraza, J.F.; Droguett, E.L.; Martins, M.R. Towards Interpretable Deep Learning: A Feature Selection Framework for Prognostics and Health Management Using Deep Neural Networks. Sensors 2021, 21, 5888. [Google Scholar] [CrossRef] [PubMed]
- Huang, W.; Khorasgani, H.; Gupta, C.; Farahat, A.; Zheng, S. Remaining Useful Life Estimation for Systems with Abrupt Failures. In Proceedings of the PHM Society Conference, Utrecht, The Netherlands, 3–6 July 2018; Volume 10. [Google Scholar] [CrossRef]
- Orsagh, R.; Brown, D.; Roemer, M.; Dabnev, T.; Hess, A. Prognostic health management for avionics system power supplies. In Proceedings of the 2005 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2005; pp. 3585–3591. [Google Scholar] [CrossRef] [Green Version]
- Kwon, W.S.; Choi, S.K.; Ban, C.H.; Bang, S.B.; Kim, C.M.; Choe, G.H. A study on the effect of arc fault on switched-mode power supply. In Proceedings of the 8th International Conference on Power Electronics-ECCE Asia, Jeju, Korea, 30 May–3 June 2011. [Google Scholar]
- Al Mohamad, A.; Ghaleb, H.; Vicenç, P. A hybrid system-level prognostics approach with online RUL forecasting for electronics-rich systems with unknown degradation behaviours. Microelectron. Reliab. 2020, 111, 113676. [Google Scholar] [CrossRef]
- Al Mohamad, A.; Ghaleb, H.; Vicenç, P. A Model-Based Prognostics Approach for RUL Forecasting of a Degraded DC-DC Converter. In Proceedings of the 2019 4th Conference on Control and Fault Tolerant Systems (SysTol), Casablanca, Morocco, 18–20 September 2019; pp. 312–318. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, L.; Peng, Y.; Liu, D. An Electro-Mechanical Actuator Motor Voltage Estimation Method with a Feature-Aided Kalman Filter. Sensors 2018, 18, 4190. [Google Scholar] [CrossRef] [Green Version]
- Yazdkhasti, S.; Sasiadek, J. Multi-Sensor Fusion Based on Adaptive Kalman Filtering. In Advances in Aerospace Guidance, Navigation and Control; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Assa, A.; Janabi-Sharifi, F. A Kalman Filter-Based Framework for Enhanced Sensor Fusion. IEEE Sens. J. 2015, 15, 3281–3292. [Google Scholar] [CrossRef]
- Al-Khatib, E.; Jaradat, M.; Abdel-Hafez, M.; Roigari, M. Multiple sensor fusion for mobile robot localization and navigation using the Extended Kalman Filter. In Proceedings of the 2015 10th International Symposium on Mechatronics and its Applications (ISMA), Sharjah, United Arab Emirates, 8–10 December 2015. [Google Scholar] [CrossRef]
- Singleton, R.K.; Strangas, E.G.; Aviyente, S. Extended Kalman Filtering for Remaining-Useful-Life Estimation of Bearings. IEEE Trans. Ind. Electron. 2015, 62, 1781–1790. [Google Scholar] [CrossRef]
- Yan, H.; Qin, Y.; Xiang, S.; Wang, Y.; Chen, H. Long-term gear life prediction based on ordered neurons LSTM neural networks. Measurement 2020, 165, 108205. [Google Scholar] [CrossRef]
- Guo, Q.; Shi, J.; Wang, S.; Zhang, C. Deep Degradation Feature Extraction and RUL Estimation for Switching Power Unit. In Proceedings of the Prognostics and System Health Management Conference (PHM-Qingdao), Qingdao, China, 25–27 October 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Mohammed, A.; Faisal, K. Reliability Analysis and Performance Degradation of a Boost Converter. IEEE Trans. Ind. Appl. 2013, 50, 5592–5597. [Google Scholar] [CrossRef]
- Zhang, H.; Kang, R.; Luo, M.; Pecht, M. Precursor parameter identification for power supply prognostics and health management. In Proceedings of the 8th International Conference on Reliability, Maintainability and Safety, Chengdu, China, 20–24 July 2009; pp. 883–887. [Google Scholar] [CrossRef]
- Ye, X.; Chen, C.; Wang, Y.; Zhou, Y.; Vachtsevanos, G. Health-assessment methodology research for SMPS based on simulation. In Proceedings of the 2015 Annual Reliability and Maintainability Symposium (RAMS), Palm Harbor, FL, USA, 26–29 January 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Zhao, M.; Zhang, D.; Zhou, Z.; Li, T.; Wang, Z. Novel method for failure prognostics of power MOSFET. In Proceedings of the IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications (CIVEMSA), Shenzhen, China, 12–14 June 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Li, H.; Ye, X.; Chen, C.; Vachtsevanos, G. A Framework for Model-Based Diagnostics and Prognostics of Switched-Mode Power Supplies. In Proceedings of the Annual Conference of the PHM Society, Fort Worth, TX, USA, 29 September–2 October 2014; Volume 6. [Google Scholar] [CrossRef]
- Mancuso, A.; Compare, M.; Salo, A.; Zio, E. Optimal Prognostics and Health Management-driven inspection and maintenance strategies for industrial systems. Reliab. Eng. Syst. Saf. 2021, 210, 107536. [Google Scholar] [CrossRef]
- Shifat, T.A.; Hur, J.W. ANN assisted multi sensor information fusion for BLDC motor fault diagnosis. IEEE Access 2021, 9, 9429–9441. [Google Scholar] [CrossRef]
- Wu, J.; Cui, X.; Zhang, H.; Lin, M. Health Prognosis with Optimized Feature Selection for Lithium-Ion Battery in Electric Vehicle Applications. IEEE Trans. Power Electron. 2021, 36, 12646–12655. [Google Scholar] [CrossRef]
- Manaswi, N.K. RNN and LSTM. In Deep Learning with Applications Using Python; Apress: Berkeley, CA, USA, 2018. [Google Scholar] [CrossRef]
- Foo, G.H.B.; Zhang, X.; Vilathgamuwa, D.M. A Sensor Fault Detection and Isolation Method in Interior Permanent-Magnet Synchronous Motor Drives Based on an Extended Kalman Filter. IEEE Trans. Ind. Electron. 2013, 60, 3485–3495. [Google Scholar] [CrossRef]
- Li, Q.; Li, R.; Ji, K.; Dai, W. Kalman Filter, and Its Application. In Proceedings of the 8th International Conference on Intelligent Networks and Intelligent Systems (ICINIS), Tianjin, China, 1–3 November 2015; pp. 74–77. [Google Scholar] [CrossRef]
- Ma, R.; Xie, R.; Xu, L.; Huangfu, Y.; Li, Y. A Hybrid Prognostic Method for PEMFC with Aging Parameter Prediction. IEEE Trans. Transp. Electrif. 2021, 7, 2318–2331. [Google Scholar] [CrossRef]
- Ojeda-Aguirre, N.A.; Garcia-Perez, A.; Romero-Troncoso, R.J.; Morinigo-Sotelo, D.; Duque-Perez, O.; Camarena-Martinez, D. Reassigned Short Time Fourier Transform and K-means Method for Diagnosis of Broken Rotor Bar Detection in VSD-fed Induction Motors. Adv. Electr. Comput. Eng. 2019, 19, 61–68. [Google Scholar] [CrossRef]
- Siami-Namini, S.; Tavakoli, N.; Namin, A.S. The Performance of LSTM and BiLSTM in Forecasting Time Series. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 3285–3292. [Google Scholar] [CrossRef]
- Nitish, S. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Shifat, T.A.; Yasmin, R.; Hur, J.-W. A Data Driven RUL Estimation Framework of Electric Motor Using Deep Electrical Feature Learning from Current Harmonics and Apparent Power. Energies 2021, 14, 3156. [Google Scholar] [CrossRef]
- Deng, Y.; Du, S.; Jia, S.; Zhao, C.; Xie, Z. Prognostic study of ball screws by ensemble data-driven particle filters. J. Manuf. Syst. 2020, 56, 359–372. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Optimizer | Adam |
| Loss function | RMSE |
| Hidden layer Neurons | 100 |
| Drop out | 0.2 |
| Epochs | 100 |
| Activation | ReLU |
| Batch Size | 1000 |
| Learning rate | 0.001 |
| Label | Electric Loading (Watt) |
|---|---|
| Case A (inferior Loading I) | 160 |
| Case B (Inferior Loading II) | 170 |
| Case C (Severe Loading I) | 180 |
| Case D (Severe Loading II) | 190 |
| Parameter | Measurement |
|---|---|
| SMPS model | AEGIS 500 |
| DC electric load model | PPL-8612C3 |
| DAQ module (Current) | NI 9246 |
| DAQ module (Voltage) | NI 9228 |
| Sampling rate (Current) | 1 kHZ |
| Sampling rate (Voltage) | 1 kHZ |
| Data Size | Performance Metrics | |||||
|---|---|---|---|---|---|---|
| MAE | RMSE | |||||
| Case C | Case D | Case C | Case D | Case C | Case D | |
| 25% | 0.02 | 0.03 | 0.03 | 0.03 | 0.01 | 0.01 |
| 50% | 0.02 | 0.02 | 0.02 | 0.03 | 0.01 | 0.01 |
| 70% | 0.02 | 0.03 | 0.02 | 0.03 | 0.01 | 0.02 |
| 100% | 0.02 | 0.02 | 0.02 | 0.02 | 0.06 | 0.03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, J.E.; Shifat, T.A.; Kareem, A.B.; Hur, J.-W. RUL Prediction of Switched Mode Power Supply Using a Kalman Filter Assisted Deep Neural Network. Processes 2022, 10, 55. https://doi.org/10.3390/pr10010055
Kwon JE, Shifat TA, Kareem AB, Hur J-W. RUL Prediction of Switched Mode Power Supply Using a Kalman Filter Assisted Deep Neural Network. Processes. 2022; 10(1):55. https://doi.org/10.3390/pr10010055
Chicago/Turabian StyleKwon, Jae Eon, Tanvir Alam Shifat, Akeem Bayo Kareem, and Jang-Wook Hur. 2022. "RUL Prediction of Switched Mode Power Supply Using a Kalman Filter Assisted Deep Neural Network" Processes 10, no. 1: 55. https://doi.org/10.3390/pr10010055