
Detection of Bubble Defects on Tire Surface Based on Line Laser and Machine Vision

Abstract
:1. Introduction
2. Image Preprocessing
2.1. Image Filtering
2.2. Morphological Processing
2.3. Extraction of the Center of the Laser Stripe
3. Bubble Defect Position Judgement
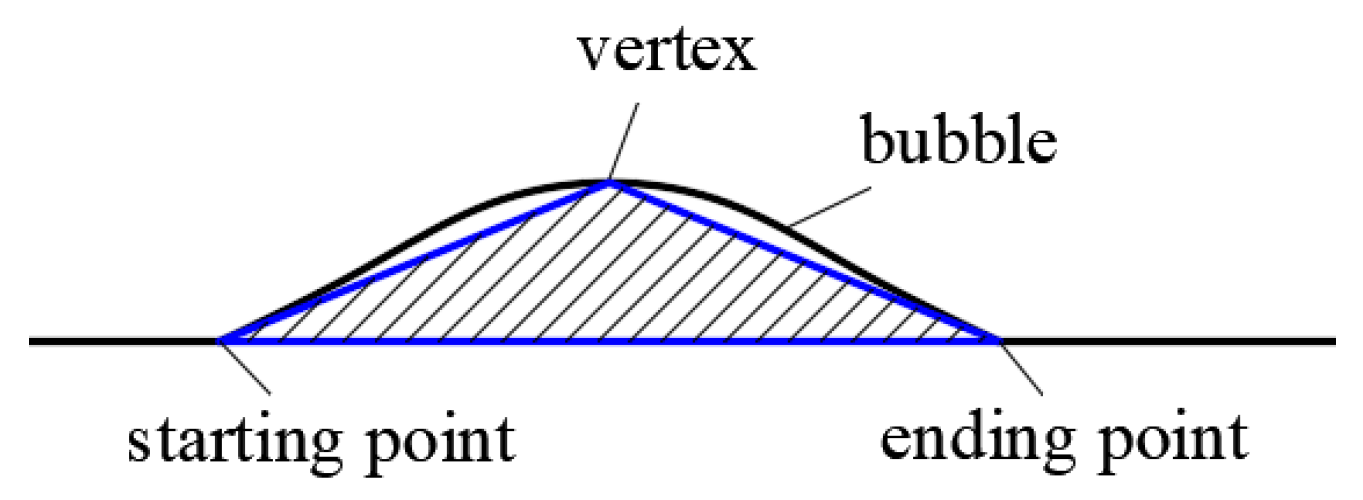
3.1. Single Bubble Defect
3.2. Real-Time Processing
3.3. Multiple Bubble Defects
4. Experimental Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Li, T.; Li, Q.L. Detection of Foreign Bodies and Bubble Defects in Tire Radiography Images Based on Total Variation and Edge Detection. Chin. Phys. Lett. 2013, 30, 084205. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, T.; Li, Q.L. Defect detection for tire laser shearography image using curvelet transform based edge detector. Opt. Laser Technol. 2013, 47, 64–71. [Google Scholar] [CrossRef]
- Zhang, Y.; Dimitri, L.; Li, Q.L. Automatic Detection of Defects in Tire Radiographic Images. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1378–1386. [Google Scholar] [CrossRef]
- Wu, X.J.; Tang, N.; Liu, B. A novel high precise laser 3D profile scanning method with flexible calibration. Opt. Lasers Eng. 2020, 132, 105938. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, B. A fast and precise three-dimensional measurement system based on multiple parallel line lasers. Chin. Phys. B 2021, 30, 024201. [Google Scholar] [CrossRef]
- Yao, L.S.; Liu, H.B. Design and Analysis of High-Accuracy Telecentric Surface Reconstruction System Based on Line Laser. Appl. Sci. 2021, 11, 488. [Google Scholar] [CrossRef]
- Yang, G.; Wang, Y. High resolution laser fringe pattern projection based on MEMS micro-vibration mirror scanning for 3D measurement. Opt. Laser Technol. 2021, 142, 107189. [Google Scholar] [CrossRef]
- Bleier, M.; Lucht, J. SCOUT3D—An Underw Ater Laser Scanning System for Mobile Mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 13–18. [Google Scholar] [CrossRef] [Green Version]
- Xue, Q.S.; Sun, Q.; Wang, F.P.; Bai, H.X.; Yang, B.; Li, Q. Underwater High-Precision 3D Reconstruction System Based on Rotating Scanning. Sensors 2021, 21, 1402. [Google Scholar] [CrossRef]
- Wei, L.; Lu, Y. Local high precision 3D measurement based on line laser measuring instrument. Young Sci. Forum 2018, 10710, 10710L. [Google Scholar]
- Lee, J.; Shin, H.; Lee, S. Developement of a Wide Area 3D Scanning System with a Rotating Line Laser. Sensors 2021, 21, 3885. [Google Scholar] [CrossRef] [PubMed]
- Suetsugu, M.; Kinoshita, K. Proposal of a Method for Obstacle Detection by the Use of Camera and Line Laser. In Proceedings of the 7th ACIS International Conference, Honolulu, HI, USA, 29–31 May 2019; pp. 1–6. [Google Scholar]
- Wang, X.B.; Li, A.J.; Ci, Q.P. The study on tire tread depth measurement method based on machine vision. Adv. Mech. Eng. 2019, 11, 168781401983782. [Google Scholar] [CrossRef]
- Naqshband, S.; Hurther, D.; Giri, S.; Bradley, R.W.; Kostaschuk, R.A.; Venditti, J.G.; Hoitink, A.J.F. The Influence of Slipface Angle on Fluvial Dune Growth. Journal of Geophy. J. Geophys. Res. Earth Surf. 2021, 126, e2020JF005959. [Google Scholar] [CrossRef]
- Xin, S.; Zhang, H.; Zhou, W.E.; Jiao, Y.F. Feasibility study of asphalt pavement pothole properties measurement using 3D line laser technology. Int. J. Transp. Sci. Technol. 2020, 10, 83–92. [Google Scholar]
- Liu, Y.; Dai, Y.C.; Shen, X.Y.; Li, D.S. Sealing Test of Gas Valve Cover of Gas Meter Based on Line Laser Triangulation Method. Am. J. Opt. Photonics 2020, 8, 74–80. [Google Scholar] [CrossRef]
- Liu, Y.L.; Li, G.C.; Zhou, H.G.; Xie, Z.C.; Feng, F.; Ge, W. On-machine measurement method for the geometric error of shafts with a large ratio of length to diameter. Measurement 2021, 176, 109194. [Google Scholar] [CrossRef]
- Ghorai, S.; Mukherjee, A.; Gangadaran, M. Automatic Defect Detection on Hot-Rolled Flat Steel Products. IEEE Trans. Instrum. Meas. 2013, 62, 612–621. [Google Scholar] [CrossRef]
- Chen, D.; Lv, G.L.; Guo, S.F.; Zuo, R.; Liu, Y.J.; Zhang, K.X.; Su, Z.Q.; Feng, W. Subsurface defect detection using phase evolution of line laser-generated Rayleigh waves. Opt. Laser Techonol. 2020, 131, 106410. [Google Scholar] [CrossRef]
- Giefer, L.A.; Arango, J.D.; Faghihabdolahi, M.; Freitag, M. Orientation detection of fruits by means of convolutional neutral networks and line laser projection for the automation of fruit packing systems. Procedia CIRP 2020, 88, 533–538. [Google Scholar] [CrossRef]
- Han, B.Y.; Talu, M.F. Fabric defect detection systems and methods—A systematic literature review. Opt.—Int. J. Light Electron Opt. 2016, 127, 11960–11973. [Google Scholar]
- Cai, Z.; Jin, C.; Xu, J. Measurement of Potato Volume With Laser Triangulation and Three-Dimensional Reconstruction. IEEE Access 2020, 8, 176565–176574. [Google Scholar] [CrossRef]
- Zl, A.; Xza, B.; Jh, A.; Kang, L.A. Visual detection method based on line lasers for the detection of longitudinal tears in conveyor belts. Measurement 2021, 183, 109800. [Google Scholar]
- Zou, Y.B.; Li, J.C.; Chen, X.Z. Seam tracking investigation via striped line laser sensor. Ind. Robot 2017, 44, 01–14. [Google Scholar] [CrossRef]
- Hwang, S.; An, Y.K.; Yang, J.; Sohn, H. Remote Inspection of Internal Delamination in Wind Turbine Blades using Continuous Line Laser Scanning Thermography. Int. J. Precis. Eng. Manuf.—Green Technol. 2020, 7, 699–712. [Google Scholar] [CrossRef]
- Ostu, N. A threshold selection method from gray-histogram. IEEE Trans. Syst. Man Cybern. 1917, 9, 62–66. [Google Scholar]
- Steger, C. An Unbiased Detector of Curvilinear Structures. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 113–125. [Google Scholar] [CrossRef] [Green Version]
- Ding, X.D. Laser Vision on Line Measurement and Quality Evaluation of Weld Surface Forming; Guangdong University of Technology: Guangzhou, China, 2018. [Google Scholar]
- Guo, Q.; Zhang, C.M.; Liu, H. Defect Detection in Tire X-Ray Images Using Weighted Texture Dissimilarity. J. Sens. 2016, 2016, 488–499. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, Z.G. Application of a cascading filter implemented using morphological filtering and time-frequency peak filtering for seismic signal enhancement. Geophys. Prospect. 2020, 68, 1727–1741. [Google Scholar] [CrossRef]
- Zhao, R.M.; An, L.; Song, D.; Li, M.; Qiao, L.; Liu, N. Detection of chlorophyll fluorescence parameters of potato leaves based on continuous wavelet transform and spectral analysis. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2021, 259, 119768. [Google Scholar] [CrossRef]
- Xiang, Y.; Zhang, C.; Guo, Q. A dictionary-based method for tire defect detection. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hulunbuir, China, 28–30 July 2014; pp. 519–523. [Google Scholar]
- Wang, R.; Guo, Q.; Lu, S. Tire Defect Detection Using Fully Convolutional Network. IEEE Access 2019, 7, 43502–43510. [Google Scholar] [CrossRef]
- Yang, Z.; Sun, Y.; Liu, S.; Jia, J. 3DSSD: Point-based 3D Single Stage Object Detector. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–18 June 2020; pp. 11040–11048. [Google Scholar]
- Shi, S.; Wang, X.; Li, H. Pointrcnn: 3d object proposal generation and detection from point cloud. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 770–779. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Accuracy of Single Bubble/% | Accuracy of Two Bubbles/% | Number of Samples |
|---|---|---|---|
| Weighted average method [29] | 88.5 | 85.5 | 200 |
| Morphological filtering method [30] | 89.5 | 88.0 | 200 |
| Wavelet method [31] | 91.0 | 89.5 | 200 |
| Dictionary method [32] | 87.5 | 84.5 | 200 |
| CNN method [33] | 77.5 | 77.0 | 200 |
| 3DSSD [34] | 74.5 | 73.5 | 200 |
| PointRCNN [35] | 75.5 | 74.0 | 200 |
| Our method | 93.0 | 91.5 | 200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Jiang, Y.; Deng, F.; Mu, Y.; Zhong, Y.; Jiao, D. Detection of Bubble Defects on Tire Surface Based on Line Laser and Machine Vision. Processes 2022, 10, 255. https://doi.org/10.3390/pr10020255
Yang H, Jiang Y, Deng F, Mu Y, Zhong Y, Jiao D. Detection of Bubble Defects on Tire Surface Based on Line Laser and Machine Vision. Processes. 2022; 10(2):255. https://doi.org/10.3390/pr10020255
Chicago/Turabian StyleYang, Hualin, Yuanzheng Jiang, Fang Deng, Yusong Mu, Yan Zhong, and Dongmei Jiao. 2022. "Detection of Bubble Defects on Tire Surface Based on Line Laser and Machine Vision" Processes 10, no. 2: 255. https://doi.org/10.3390/pr10020255