
Design and Experimental Research of a New Film-Picking Mulch Film Recovery Machine with Impurity Separation Function

 ,
,
Abstract
:1. Introduction
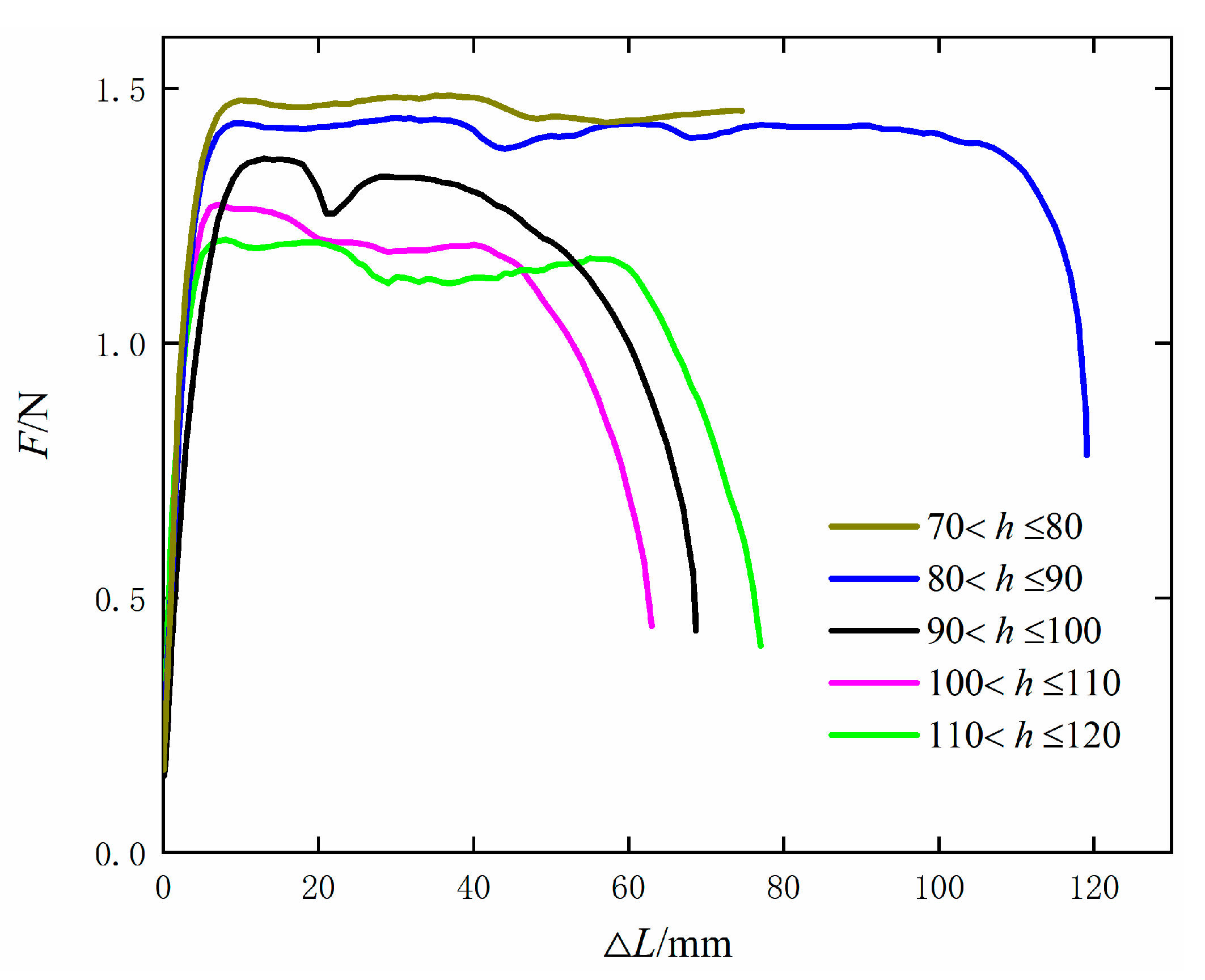
2. Experimental Method
- = the fracture elongation (%);
- = the marking distance at the point of tension fracture (mm);
- = the initial line mark distance (mm).
- E = the constant 10;
- R2 = the correlation coefficient of the polynomial fitting, which characterizes the degree of the linear correlation;
- x = the represents deformation extent, and y represents tensile force.
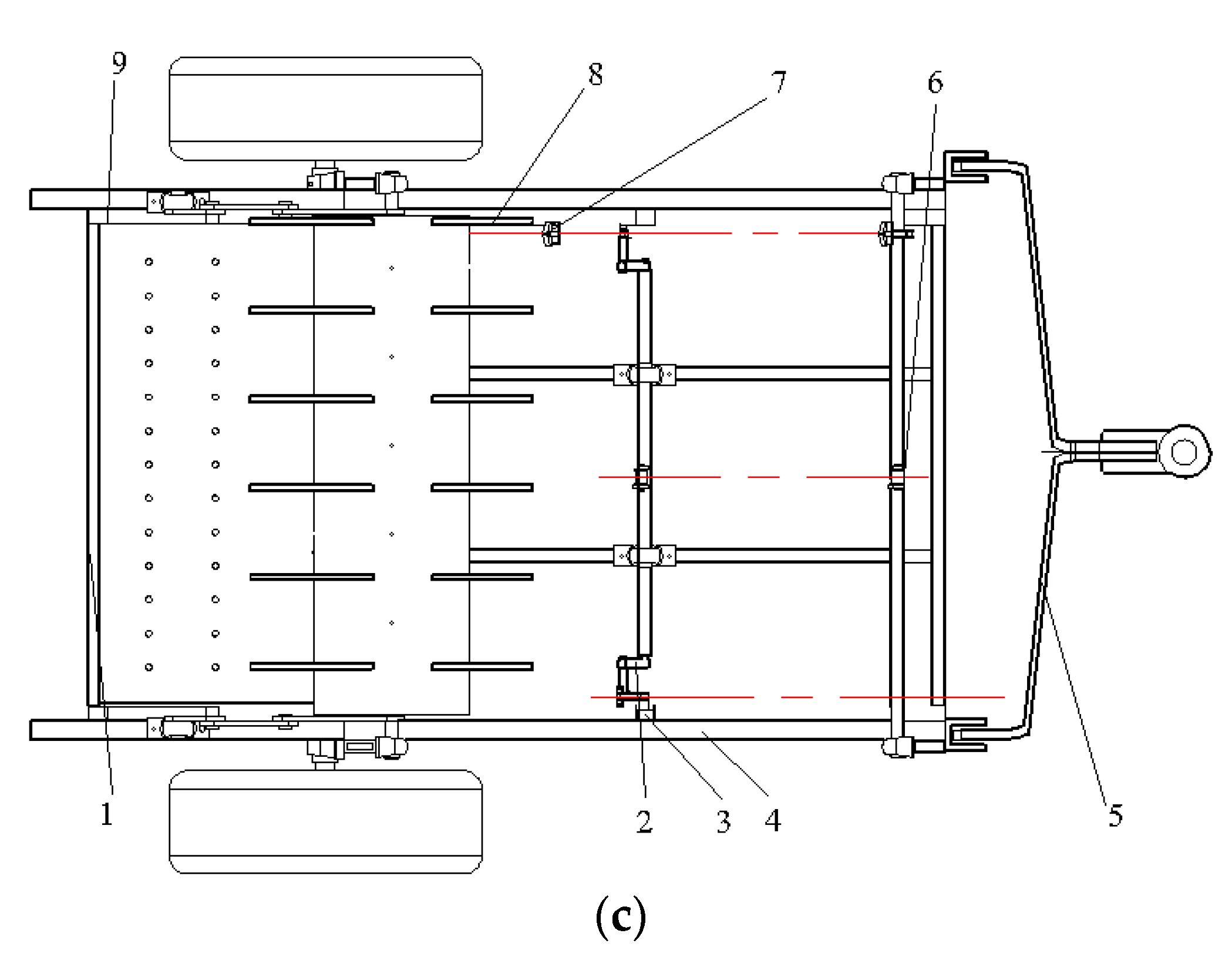
3. The Structure and Working Principle
3.1. The Design of the Film Picking Mechanism
3.2. The Design of Clamping Conveying Mechanism
- = the pulling force of film picking mechanism on residual film (N);
- = the pulling force of clamping finger on residual film (N);
- = the supporting force of clamping finger on residual film (N);
- = the supporting force of film picking mechanism on residual film (N);
- = the mass of the residual film (Kg);
- = the friction between residual film and impurities (N);
- = the acceleration of gravity (m/s2);
- = the friction coefficient between residual film and impurities;
- = angular separation between straightening direction and horizontal direction of the residual film.
- R = curvature radius of the film picking mechanism in a non-uniform circular motion (m);
- φ = the longitudinal included angle formed by gravity and the clamping finger.
- Fa = the air resistance (N);
- k = the resistance coefficient (N·s/m);
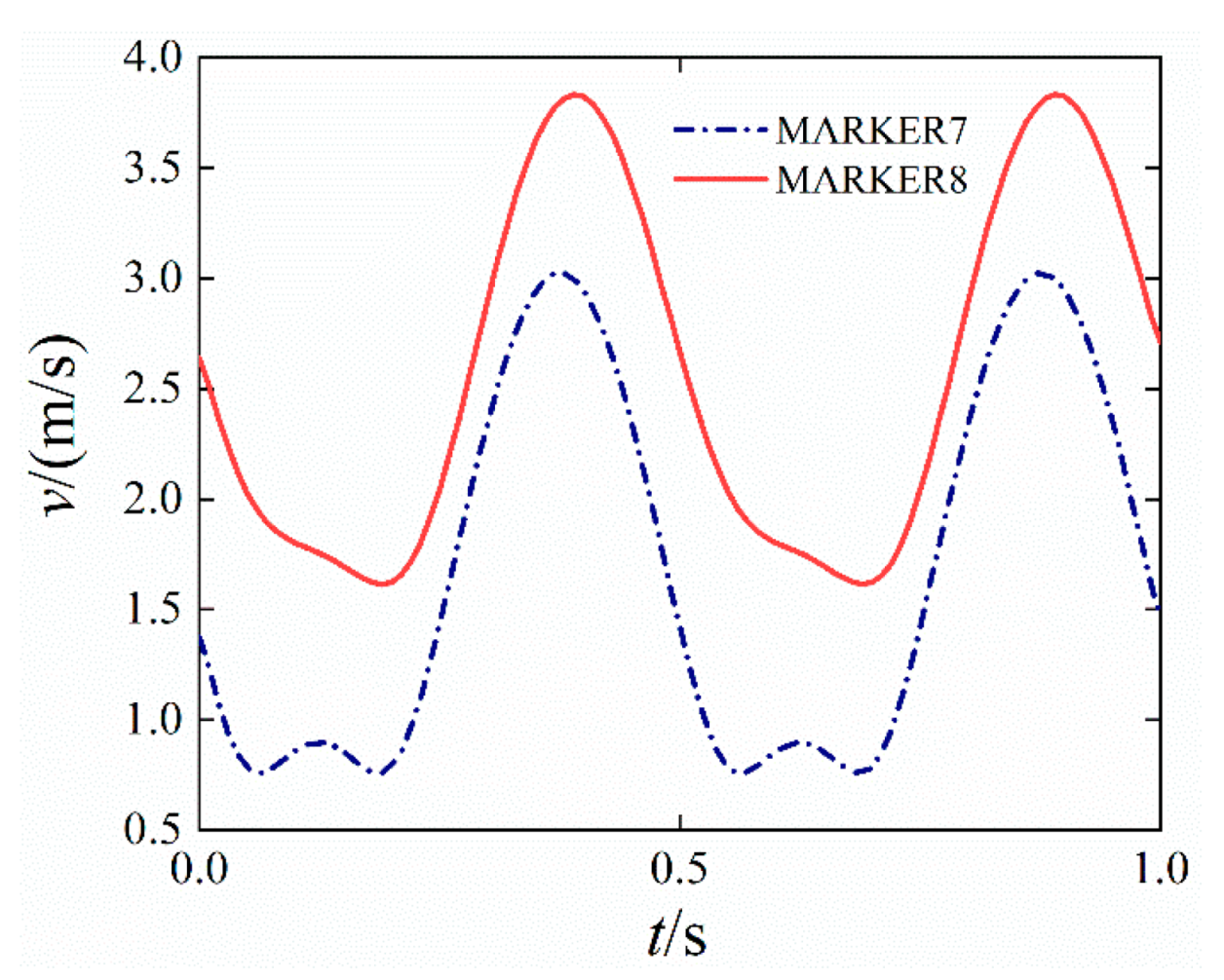
- v = the velocity of residual films (m/s).
- z1 = the tooth number of spindle sprocket wheels of the film picking machine;
- = spindle speed of the film picking mechanism (r/s).
- = the spindle’s rotational velocity of the film picking machine, r/s;
- = the tooth number of sprocket wheels.
- l = the proportional coefficient;
- η = the sinusoidal coefficient;
- ρ = the cosine coefficient.
- v2 = the initial velocity of films and impurities being projected (m/s);
- vx = the horizontal vector of the initial velocity (m/s);
- vy = the vertical vector of the initial velocity (m/s);
- t = the period time from films and impurities being projected to touching the stripping roller (s);
- ε = the damping coefficient.
- v3 = the velocity of the stripping roller (m/s);
- d = the pitch circle diameter of the sprocket wheel;
- z3 = the tooth number of the sprocket wheel on the film-stripping roll shaft.
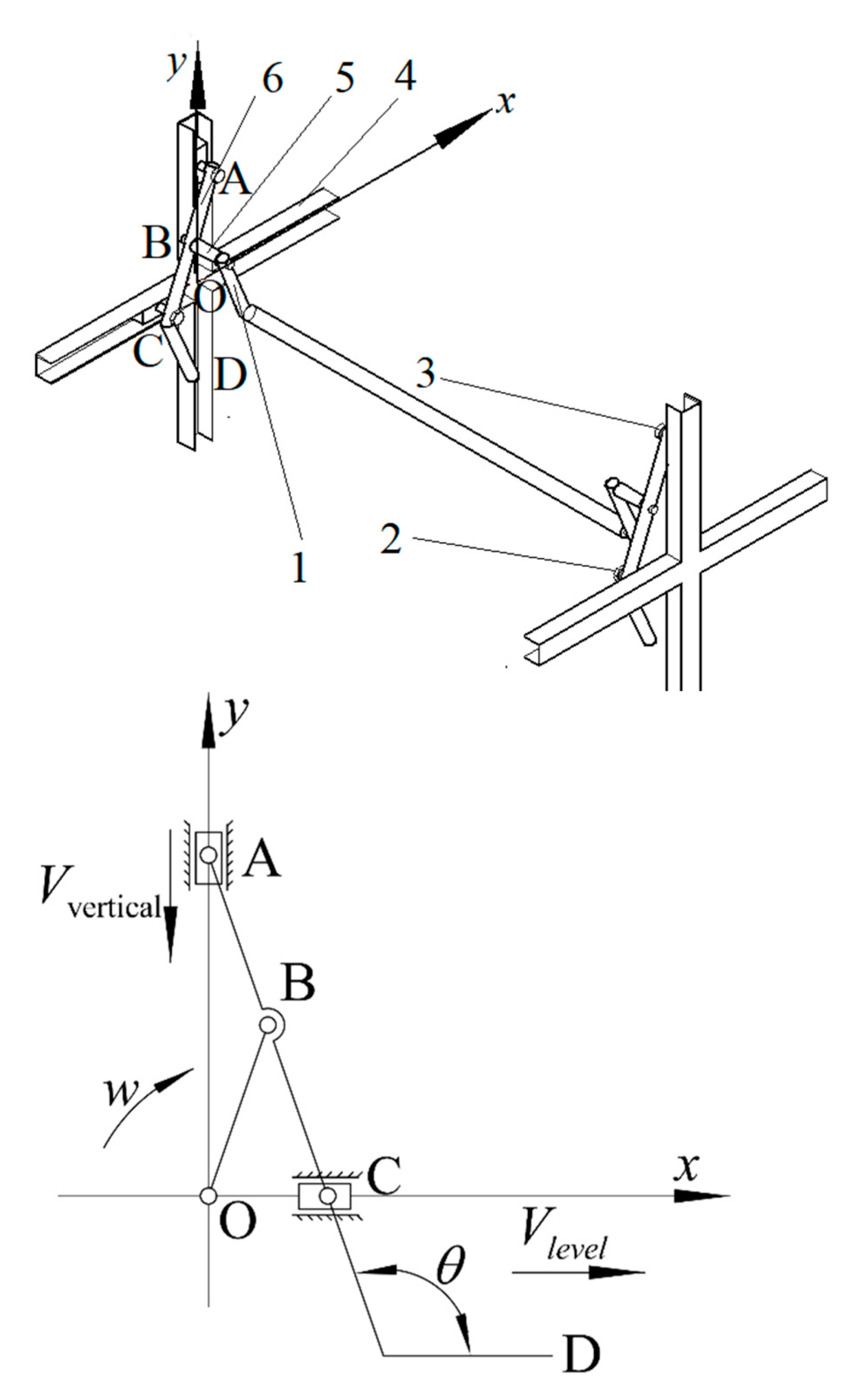
3.3. The Analysis of the Film-Picking Mechanism
3.3.1. The Analysis of the Film-Picking Mechanism
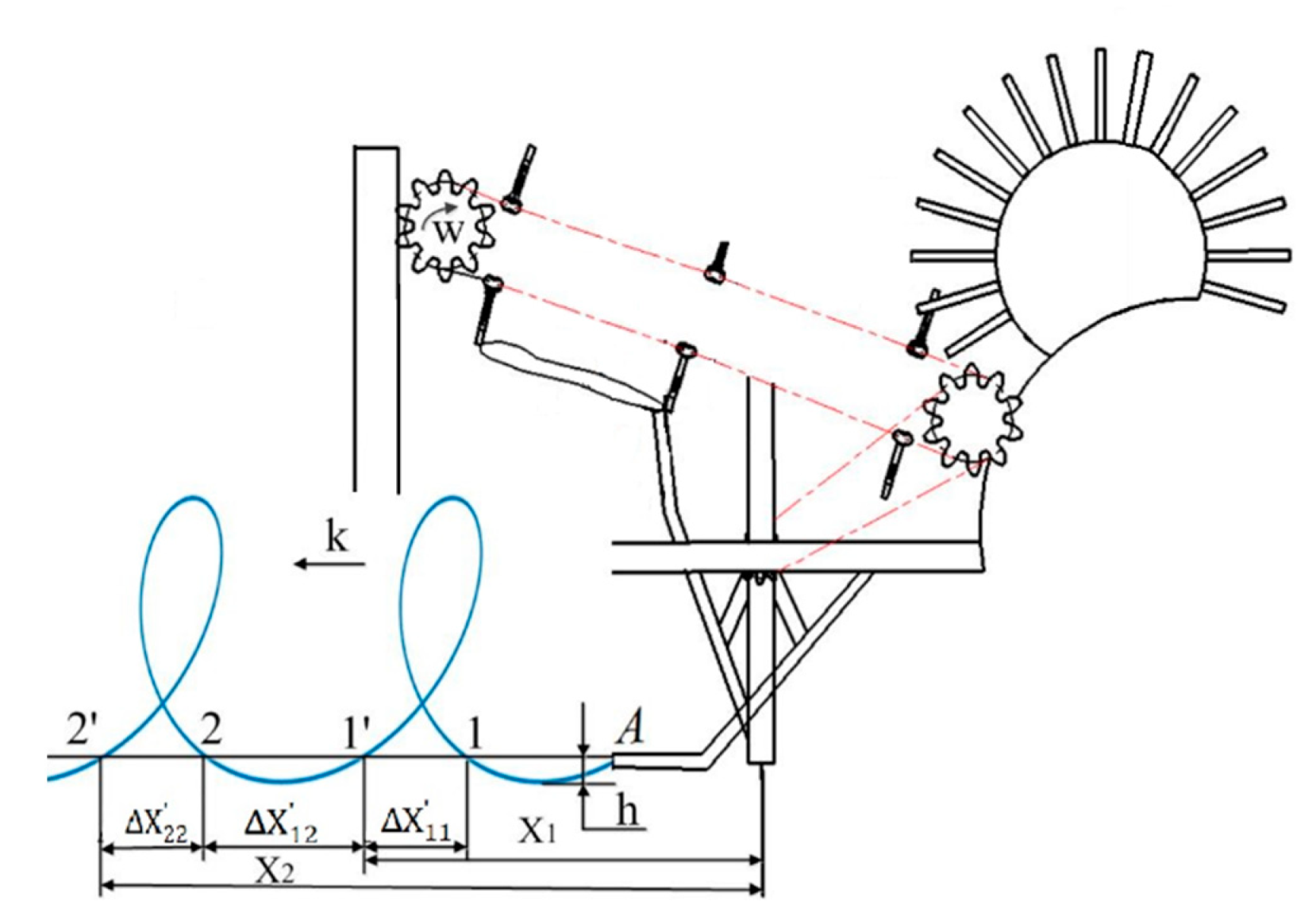
3.3.2. The Dynamic Simulation Analysis of the Film-Picking Process
4. Field Test
4.1. Test Conditions
4.2. Test Design and Methods
4.3. Test Indicators
- m = the flattening gross mass of residual films from the film collecting box (g);
- mc = the mass of residual films which fall in the testing area (g);
- me = the mass of residual films which winds in the film-picking machine and clamping conveyor (g);
- mf = the mass of residual films in the film collecting box (g);
- m0 = the per unit area mass of unused films (g);
- s0 = the unit area of unused films (m2);
- s1 = the flattening gross area of residual films from the film collecting box (m2).
4.4. The Analysis and Optimization of the Test Results
4.4.1. The Establishment and Significance Test of the Regression Equation
4.4.2. The Analysis of the Influencing Factors’ Influence on Performance Effect
- F = the value of the variance analysis on the regression model;
- = the weight coefficient of the regression term to F and is the weight coefficient of all factors.
4.5. The Analysis of All Interaction Factors to Response Index
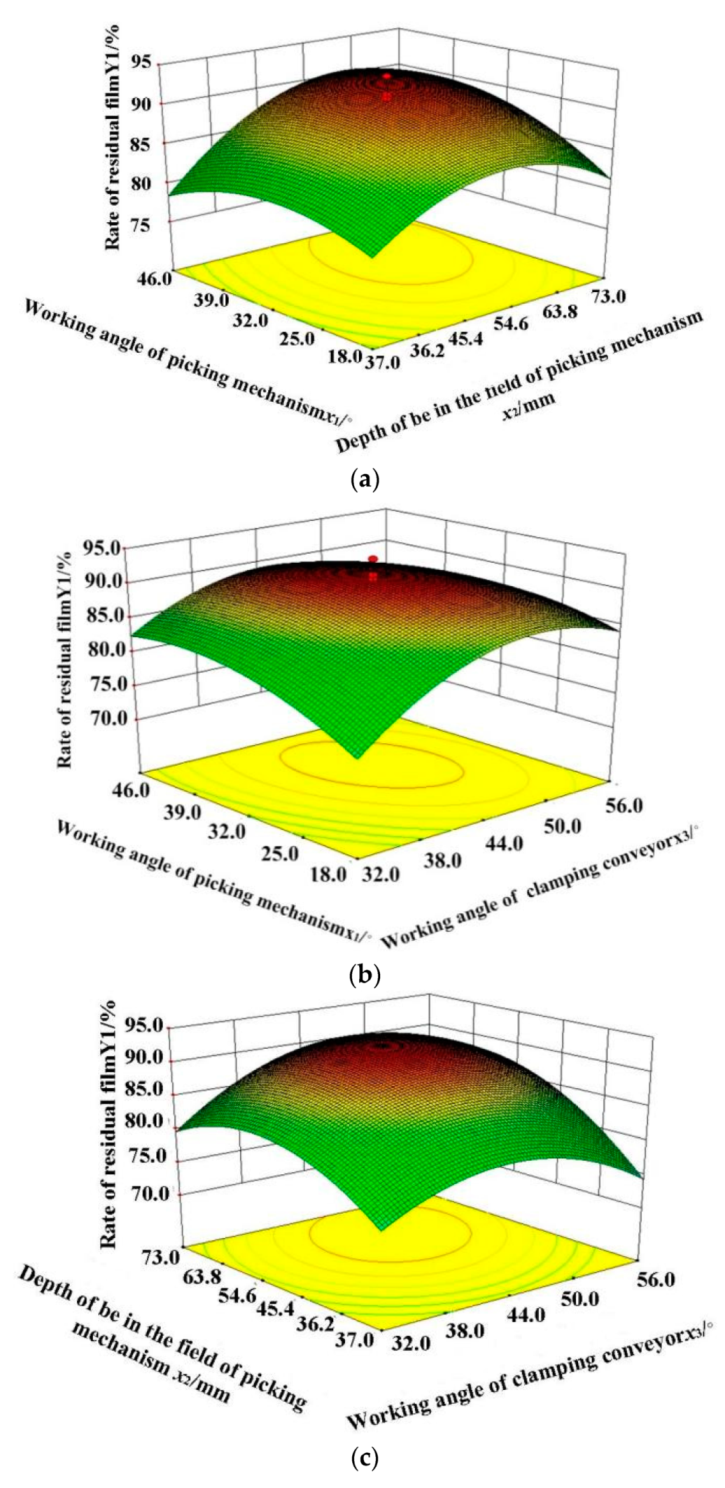
4.5.1. The Analysis of All Interaction Factors to the Residual Film Recovery Rate
4.5.2. The Analysis of All Interaction Factors to the Residual Film Release Rate
4.6. Parameter Optimization
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mahajan, G.; Sharda, R.; Kumar, A.; Singh, K.G. Effect of plastic mulch on economizing irrigation water and weed control in baby corn sown by different methods. Afr. J. Agric. Res. 2007, 2, 19–26. [Google Scholar]
- Jiang, X.J.; Liu, W.J.; Wang, E.H.; Zhou, T.Z.; Xin, P. Residual plastic mulch fragments effects on soil physical properties and water flow behavior in the minqin oasis, northwestern China. Soil Tillage Res. 2017, 166, 100–107. [Google Scholar] [CrossRef]
- Ning, S.R.; Zuo, Q.; Shi, J.C.; Wang, S.; Liu, Z.S. Water use efficiency and benefit for typical planting modes of drip-irrigated cotton under film in Xinjiang. Trans. Chin. Soc. Agric. Eng. 2013, 29, 90–99. [Google Scholar]
- Meng, H.W.; Li, J.J.; Wang, N.Y.; Kan, Z. The design of the comb-tooth drum type residual film recycling machine. J. Agric. Mech. Res. 2021, 34, 145–148. [Google Scholar]
- Niu, Q.; Chen, X.G.; Ji, C. Experiment and optimal design of a collection device for a residual plastic film baler. Front. Agric. Sci. Eng. 2015, 2, 347–354. [Google Scholar] [CrossRef] [Green Version]
- Parish Richard, L.; Bracy Regina, P. Removal and collection of plastic mulch. ASAE Annu. Int. Meet. 2000, 1, 2267–2274. [Google Scholar]
- Chrysler, R.W. Apparatus for Removing Plastic Film from Raised Plant Beds. U.S. Parent No. 4796711, 10 January 1989. [Google Scholar]
- Rocca, A.R. Plastic Mulch retriever for Use by e.g., Faarmer. Australia Patent No. WO20090776729-A1, 10 June 2014. [Google Scholar]
- Ma, S.; Zhang, X. Design and Experiment of Side of Used Plastic Film Collector Machine. Agric. Eng. 2012, 28, 73–75. [Google Scholar]
- Abdureyim, I.; Hamdulla, A.; Tursun, M. FEM Analysis and Optimization Design of a Plastic Film Cutting Machine Tool Rest Structure. Adv. Mater. Res. 2008, 33–37, 1393–1398. [Google Scholar] [CrossRef]
- Zhang, H.M.; Yan, L.M.; Chen, X.G. Simulation and test of film surface cleaning roller of residual film collector. Int. Agric. Eng. J. 2019, 28, 257–267. [Google Scholar]
- Yang, S.M.; Chen, X.G.; Yan, L.M. Performance of three different spades for residual plastic film recycling machine. Appl. Eng. Agric. 2020, 36, 187–195. [Google Scholar] [CrossRef]
- Van Der Meulen, E.S.; Nol, L.; Cammeraat, L.H. Effects of irrigation and plastic mulch on soil properties on semiarid abandoned fields. Soil Sci. Soc. 2006, 70, 930–939. [Google Scholar] [CrossRef] [Green Version]
- Horodytska, O.; Valdés, F.J.; Fullana, A. Centrifugal dewatering performance in plastic films recycling. Waste Manag. 2018, 80, 211–217. [Google Scholar] [CrossRef] [PubMed]
- Hou, S.L.; Zhang, S.M.; Kong, J.M.; Zhang, H.Y.; Na, M.J.; Dong, X.; Li, Y.Q.; Yang, X.L. Development of spring-tooth plastic film collecting machine. J. China Agric. Univ. 2004, 9, 18–22. [Google Scholar]
- Liu, Y.C.; Jian, J.M.; Chen, Y.D.; Hou, S.L. Study on the recycling machine of plastic film with shovel-excavation screening. Appl. Mech. Mater. 2013, 423–426, 2045–2048. [Google Scholar] [CrossRef]
- Briassoulis, D. Mechanical behaviour of biodegradable agricultural films under real field conditions. Polym. Degrad. Stab. 2006, 91, 1256–1272. [Google Scholar] [CrossRef]
- Liu, E.K.; He, W.Q.; Yan, C.R. ‘White revolution’ to ‘white pollution’—Agricultural plastic film mulch in China. Environ. Res. Lett. 2014, 9, 091001. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Liu, H.B.; Hu, W.L. The status and distribution characteristics of residual mulching film in Xinjiang, China. J. Integr. Agric. 2016, 15, 2639–2646. [Google Scholar] [CrossRef] [Green Version]
- Sintim, H.Y.; Flury, M. Is Biodegradable Plastic Mulch the Solution to Agriculture’s Plastic Problem? Environ. Sci. Technol. 2017, 51, 1068–1069. [Google Scholar] [CrossRef]
- Pietro, P. Innovative material and improved technical design for a sustainable exploitation of agricultural plastic film. J. Macromol. Sci. 2014, 53, 1000–1011. [Google Scholar]
- Briassoulis, D.; Babou, E.; Hiskakis, M.; Scarascia, G.; Picuno, P.; Guarde, D.; Dejean, C. Review, mapping and analysis of the agricultural plastic waste generation and consolidation in Europe. Waste Manag. Res. 2013, 31, 1262–1278. [Google Scholar] [CrossRef]
- Bos, U.; Makishi, C.; Fischer, M. Life cycle assessment of common used agricultural plastic products in the EU. Acta Hortic. 2008, 801, 341–350. [Google Scholar] [CrossRef]
- Gao, H.H.; Yan, C.R.; Liu, Q.; Ding, W.L.; Chen, B.Q.; Li, Z. Effects of plasticmulching and plastic residue on agricultural production: A meta-analysis. Sci. Total Environ. 2019, 651, 484–492. [Google Scholar] [CrossRef] [PubMed]
- Xie, J.H.; Zhang, F.X.; Chen, X.G.; Han, Y.J.; Tang, W. Design and parameter optimization of arc tooth and rolling bundle type plastic film residue collector. Trans. Chin. Soc. Agric. Eng. 2019, 35, 26–37. [Google Scholar]
- Luo, P.; Yuan, P.P.; Jin, W.; Yan, J.S.; Bai, S.X.; Zhang, C.S.; Zhang, X.J. Design of chain-sieve type residual film recovery machine in plough layer and optimization of its working parameters. Trans. Chin. Soc. Agric. Eng. 2018, 34, 11–22. [Google Scholar]
- Wang, Z.C.; Li, X.Y.; Shi, L.W.; Yang, W.H.; Qin, Y.M. Estimating the Water Characteristic Curve for Soil Containing Residual Plastic Film Based on an Improved Pore-size Distribution. Geoderma 2020, 370, 11–15. [Google Scholar] [CrossRef]
- Zhang, X.J.; Liu, J.Q.; Shi, Z.L.; Jin, W.; Yan, J.S.; Yu, M.J. Design and parameter optimization of reverse membrane and soil separation device for residual film recovery machine. Trans. Chin. Soc. Chin. Soc. Agric. Eng. 2019, 35, 46–55. [Google Scholar]
- Zhai, H.Z.; Jian, J.M.; Hou, S.L.; San, Y.L.; Gao, M.Q. The design and test of collecting device and film purge device joint work of residual film recovery machine based on Solidworks & Adam. IOP Conf. Ser. Mater. Sci. Eng. 2018, 324, 012029. [Google Scholar]
- Duan, W.X.; Wang, J.K.; Li, T.; Gong, H.H.; Niu, H.L.; Luo, W.; Bi, X.S. Design and test of clamping finger-chain type device for recycling agricultural plastic film. Trans. Chin. Soc. Agric. Eng. 2016, 32, 35–42. [Google Scholar]
- Zhang, M.J.; Jian, J.M.; Wang, F.L.; Li, W.; San, Y.L.; Guo, W.S.; Hou, S.L.; Xue, D.Q. Design and experimental study on belt-tooth type collector for potato film residues. IOP Conf. Ser. Earth Environ. Sci. 2019, 252, 042092. [Google Scholar] [CrossRef]
- Pan, F.; Hu, B.; Luo, X.; Guo, M.; He, H. Design and testing of a shearing and breaking device for mulch film and cotton stalk mixtures. Trans. Asabe 2021, 64, 545–555. [Google Scholar] [CrossRef]
- Wang, K.J.; Hu, B.; Luo, X.; Chen, X.G.; Zheng, X.; Yan, L.M.; Gou, H.X. Design and experiment of monomer profiling raking-film mechanism of residue plastic film collector. Trans. Chin. Soc. Chin. Soc. Agric. Eng. 2017, 33, 12–20. [Google Scholar]
- You, Z.Y.; Hu, Z.C.; Wu, H.C.; Zhang, Y.P.; Yan, J.C.; Yan, W.; Zhou, X.X. Design and test of 1MCDS-100A shovel-screen residual film recovery machine. Trans. Chin. Soc. Agric. Eng. 2017, 33, 10–18. [Google Scholar]
- Guo, W.S.; Jian, J.M.; San, Y.L.; Li, G.; Gao, M.Q.; Hou, S.L. Design and experimental optimization of 4CML-1000 type chain rake film recycling machine. Trans. Chin. Soc. Agric. Mach. 2018, 49, 66–73. [Google Scholar]
- Lv, Z.Q.; Zhang, L.; Zhang, G.L.; Liu, S.F. Design and test of chain guide rail-type plastic film collector. Trans. Chin. Soc. Agric. Eng. 2015, 31, 48–54. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Tensile Test Specimen | |
|---|---|---|
| Horizontal Stretch | Longitudinal Stretch | |
| Tensile Rate (mm/min) | 500 | 500 |
| Initial Line Mark Distance (mm) | 100 | 100 |
| Specimen Width (mm) | 10 | 10 |
| Items | Design Values |
|---|---|
| The Size of the Specimen/mm×mm×mm | 1300 × 1250 × 780 |
| Traction Mode | Traction |
| Auxiliary Power/kw | 30~66 |
| Operating Speed/km·h−1 | ≥3.5 |
| Recovery Rate/% | ≥85 |
| Test Level | The Test Factors | ||
|---|---|---|---|
| The Working Angle of the Film-Picking Mechanism x1/° | Depth Into the Soil of the Film-Picking Mechanism x2/mm | The Working Angle of the Clamping Conveyor Mechanism x3/° | |
| −1.682 | 8.452 | 24.724 | 23.816 |
| −1 | 18 | 37 | 32 |
| 0 | 32 | 55 | 44 |
| 1 | 46 | 73 | 56 |
| 1.682 | 55.548 | 85.276 | 64.184 |
| No. | Test Factors | Response Index | ||||
|---|---|---|---|---|---|---|
| The Working Angle of Film Picking Mechanism x1/° | Depth of Pick-up Mechanism into the Soil x2/mm | The Working Angle of Clamping Conveyor x3/° | Recovery Rate D/% | Damage Rate E/% | Release Rate N/% | |
| 1 | −1 | −1 | −1 | 86.90 | 30.02 | 87.48 |
| 2 | 1 | −1 | −1 | 86.08 | 29.32 | 89.00 |
| 3 | −1 | 1 | −1 | 83.16 | 31.6 | 89.64 |
| 4 | 1 | 1 | −1 | 84.69 | 30.27 | 89.44 |
| 5 | −1 | −1 | 1 | 87.05 | 31.25 | 86.10 |
| 6 | 1 | −1 | 1 | 88.95 | 29.66 | 85.79 |
| 7 | −1 | 1 | 1 | 84.35 | 31.95 | 88.11 |
| 8 | 1 | 1 | 1 | 85.87 | 30.88 | 87.65 |
| 9 | −1.682 | 0 | 0 | 85.60 | 30.75 | 88.05 |
| 10 | 1.682 | 0 | 0 | 90.96 | 28.36 | 85.08 |
| 11 | 0 | −1.682 | 0 | 86.90 | 30.02 | 87.48 |
| 12 | 0 | 1.682 | 0 | 84.64 | 31.97 | 87.79 |
| 13 | 0 | 0 | −1.682 | 83.91 | 30.89 | 89.60 |
| 14 | 0 | 0 | 1.682 | 86.85 | 31.50 | 86.05 |
| 15 | 0 | 0 | 0 | 92.04 | 27.88 | 84.48 |
| 16 | 0 | 0 | 0 | 92.21 | 28.06 | 84.13 |
| 17 | 0 | 0 | 0 | 86.90 | 30.02 | 87.48 |
| 18 | 0 | 0 | 0 | 92.68 | 28.17 | 83.55 |
| 19 | 0 | 0 | 0 | 93.18 | 27.57 | 82.75 |
| 20 | 0 | 0 | 0 | 92.31 | 27.85 | 84.24 |
| Source of Variance | Recovery Rate D/% | Damage Rate E/% | Release Rate N/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sum of Squares | Degree of Freedom | F Value | p Value | Sum of Squares | Degree of Freedom | F Value | p Value | Sum of Squares | Degree of Freedom | F Value | p Value | |
| Model | 1305.1 | 9 | 25.3 | <0.0001 ** | 776.5 | 9 | 28.3 | <0.0001 ** | 425.48 | 9 | 7.2 | 0.002 ** |
| x1 | 39.2 | 1 | 6.8 | 0.02 * | 5.2 | 1 | 1.7 | 0.21 | 15.41 | 1 | 2.35 | 0.15 |
| x2 | 141.7 | 1 | 24.7 | 0.0006 ** | 478.47 | 1 | 156.9 | <0.0001 ** | 100.49 | 1 | 15.29 | 0.002 ** |
| x3 | 83.9 | 1 | 14.6 | 0.003 ** | 4.4 | 1 | 1.4 | 0.2551 | 50.52 | 1 | 7.69 | 0.01 * |
| x1x2 | 37.4 | 1 | 6.5 | 0.0286 * | 1.9 | 1 | 0.6 | 0.4480 | 21.78 | 1 | 3.31 | 0.09 |
| x1x3 | 27.7 | 1 | 4.8 | 0.0523 | 0.1 | 1 | 0.05 | 0.8282 | 31.2 | 1 | 4.75 | 0.05 |
| x2x3 | 40.0 | 1 | 6.9 | 0.0245 * | 0.6 | 1 | 0.2 | 0.6514 | 52.02 | 1 | 7.92 | 0.018 * |
| 144.9 | 1 | 25.3 | 0.0005 ** | 24.7 | 1 | 8.1 | 0.0173 * | 36.35 | 1 | 5.53 | 0.04 * | |
| 425.6 | 1 | 74.3 | <0.0001 | 159.4 | 1 | 52.2 | <0.0001 ** | 48.56 | 1 | 7.39 | 0.021 * | |
| 528.0 | 1 | 92.2 | <0.0001 | 146.1 | 1 | 47.9 | <0.0001** | 97.11 | 1 | 14.78 | 0.003** | |
| Residual | 57.2 | 10 | 30.4 | 10 | 65.71 | 10 | ||||||
| Lack of fit | 30.9 | 5 | 1.1 | 0.43 | 7.7 | 5 | 0.3 | 0.8686 | 51.27 | 5 | 3.55 | 0.0952 |
| Pure error | 26.2 | 5 | 22.7 | 5 | 14.43 | 5 | ||||||
| Total | 1362.37 | 19 | 807.0 | 19 | 491.19 | 19 | ||||||
| Response Index | Influencing Factor’s Weight | Weight Order | ||
|---|---|---|---|---|
| The Working Angle of the Film-Picking Mechanism x1/° | Depth into the Soil of the Film-Picking Mechanism x2/mm | The Working Angle of the Clamping Conveyor Mechanism x3/° | ||
| Recovery rate | 2.5525 | 2.7323 | 2.6254 | x2 > x3 > x1 |
| Damage rate | 0.5938 | 1.9809 | 0.4143 | x2 > x1 > x3 |
| Release rate | 1.6482 | 2.5939 | 2.4584 | x2 > x3 > x1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, J.; Li, S.; Bi, X.; Wang, G.; Wang, J.; Wang, W.; Tong, N. Design and Experimental Research of a New Film-Picking Mulch Film Recovery Machine with Impurity Separation Function. Processes 2022, 10, 455. https://doi.org/10.3390/pr10030455
Dong J, Li S, Bi X, Wang G, Wang J, Wang W, Tong N. Design and Experimental Research of a New Film-Picking Mulch Film Recovery Machine with Impurity Separation Function. Processes. 2022; 10(3):455. https://doi.org/10.3390/pr10030455
Chicago/Turabian StyleDong, Jianhao, Shuzhuo Li, Xinsheng Bi, Guangheng Wang, Jikui Wang, Wensheng Wang, and Ningze Tong. 2022. "Design and Experimental Research of a New Film-Picking Mulch Film Recovery Machine with Impurity Separation Function" Processes 10, no. 3: 455. https://doi.org/10.3390/pr10030455
APA StyleDong, J., Li, S., Bi, X., Wang, G., Wang, J., Wang, W., & Tong, N. (2022). Design and Experimental Research of a New Film-Picking Mulch Film Recovery Machine with Impurity Separation Function. Processes, 10(3), 455. https://doi.org/10.3390/pr10030455