
Research on Fault Diagnosis of PST Electro-Hydraulic Control System of Heavy Tractor Based on Support Vector Machine


Abstract
:1. Introduction
2. Failure Analysis of PST Electro-Hydraulic System
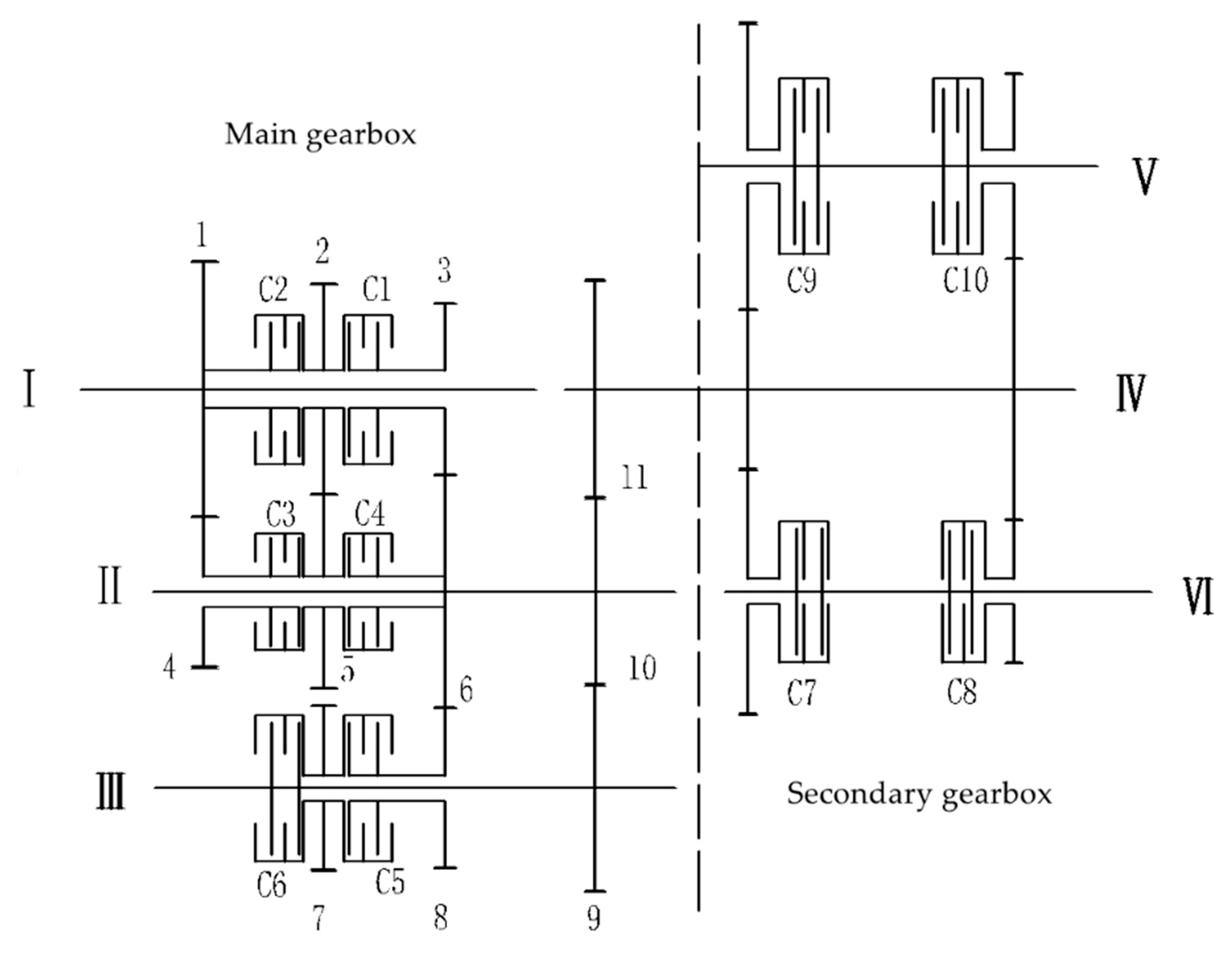
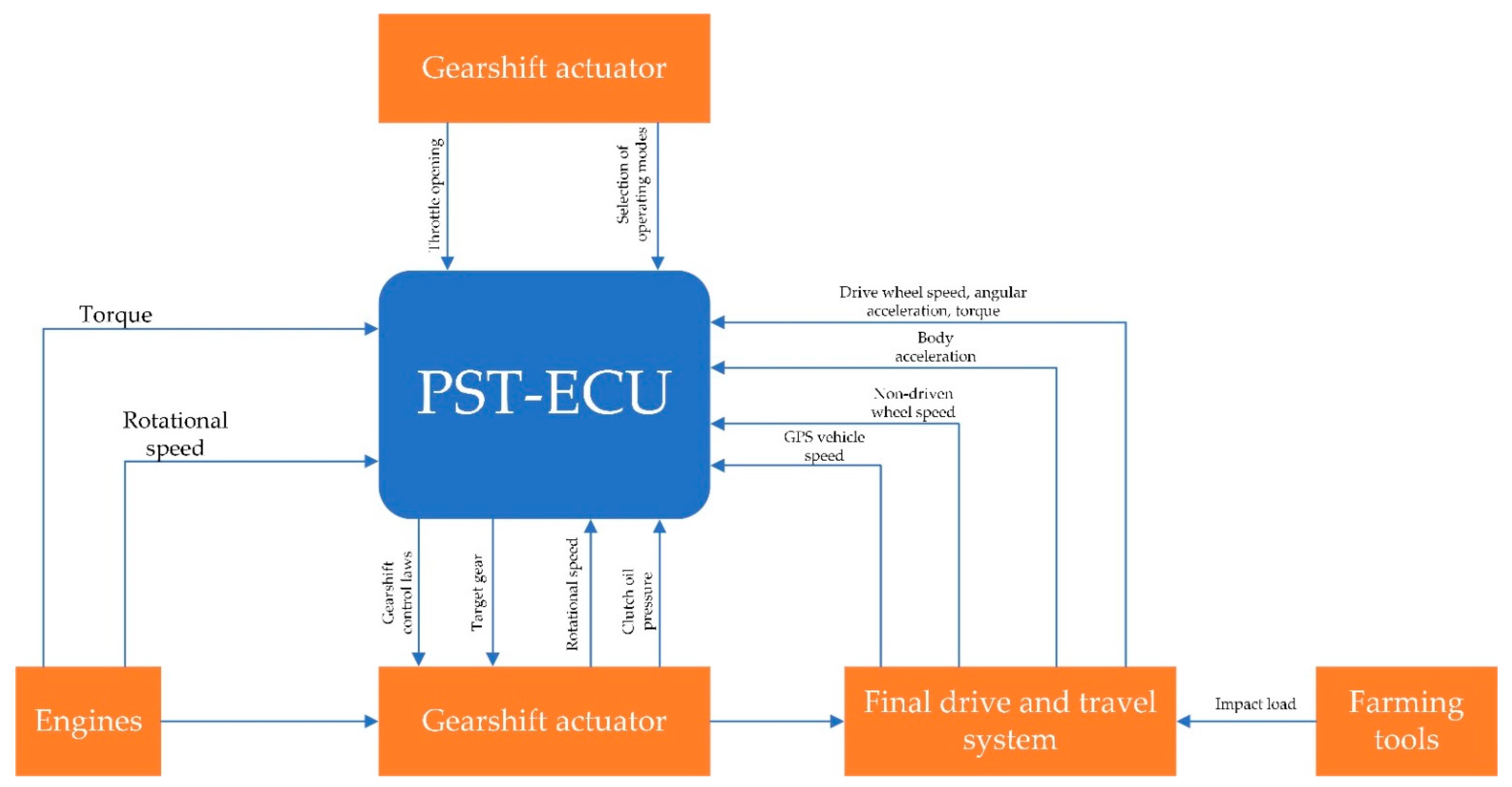
2.1. How a Full Power Shift Transmission Works
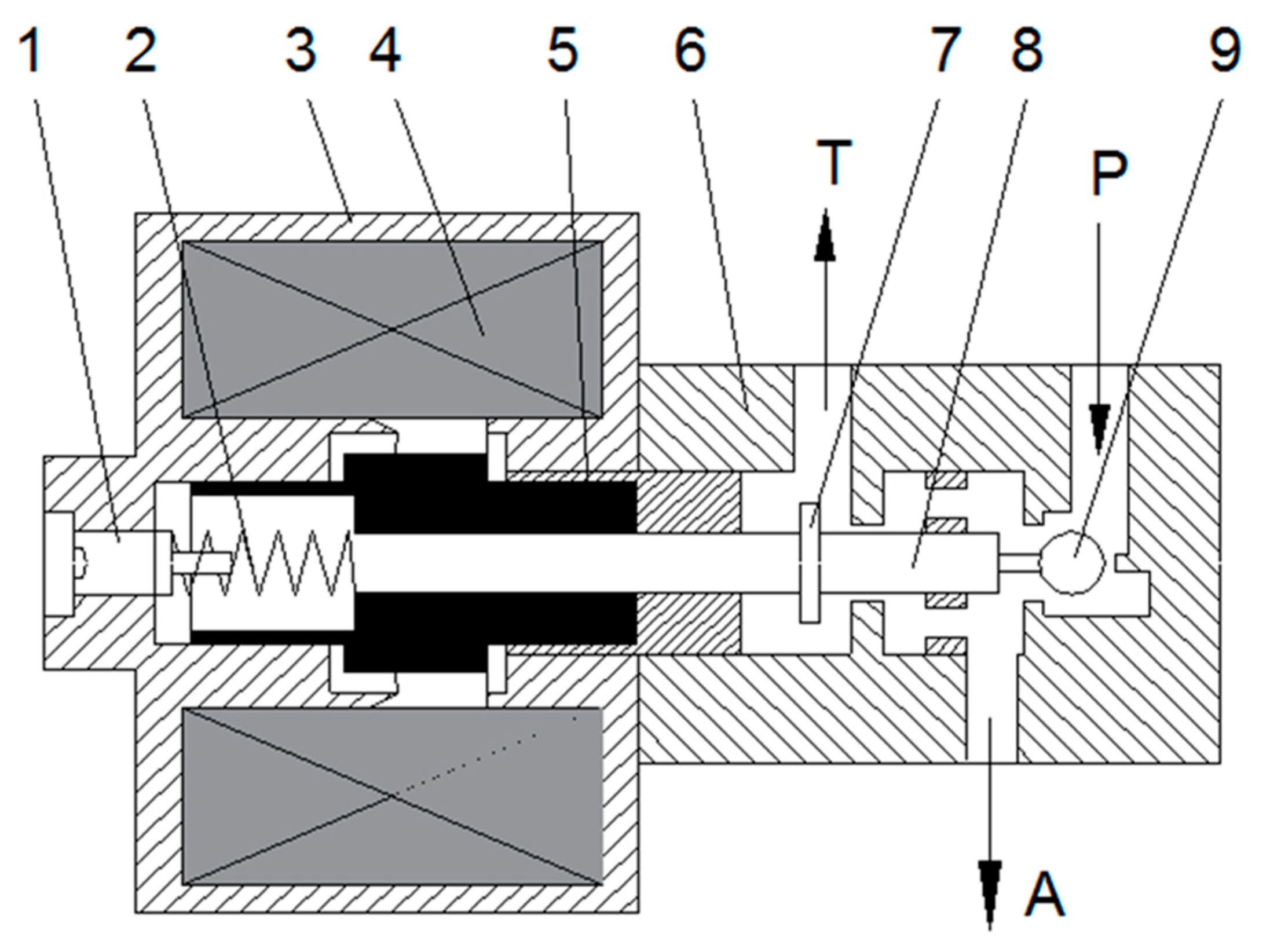
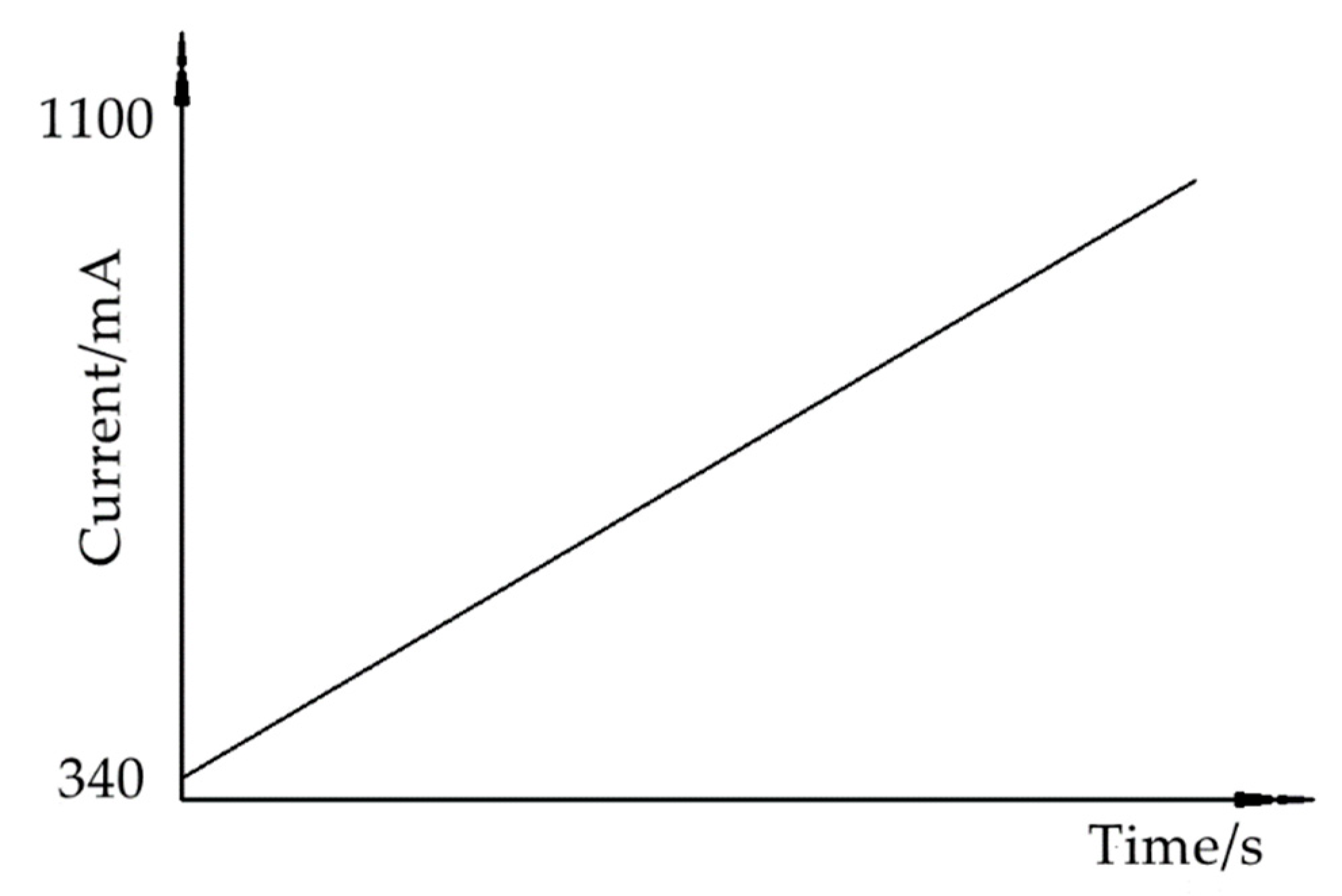
Electro-Hydraulic Proportional Control System
2.2. Electronic Control System Failure
2.3. PST Hydraulic System Failure
3. Fault Diagnosis of PST Electro-Liquid System Based on CAN Bus Network
3.1. Fault Diagnosis Principle
3.2. SVM Principle
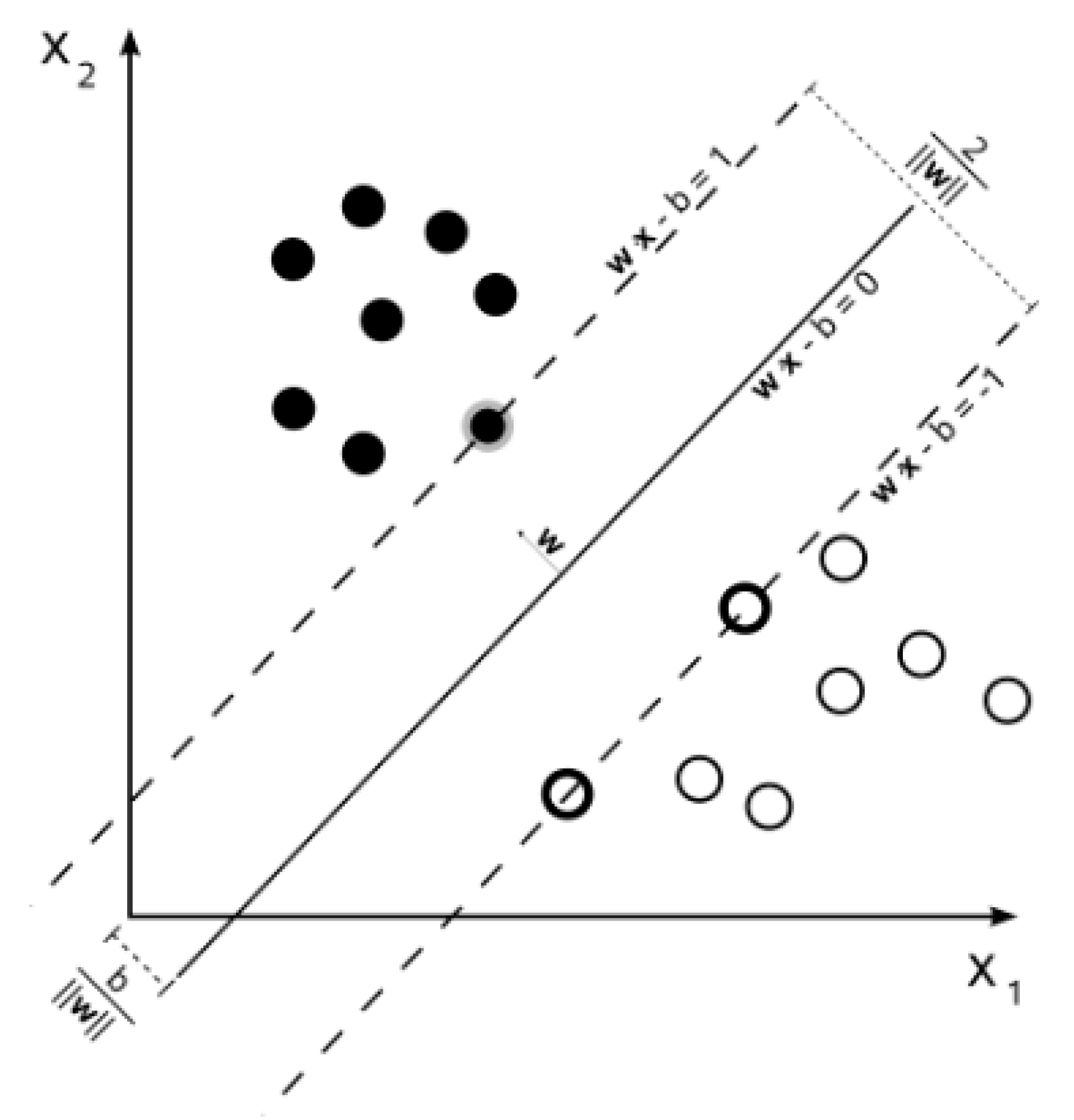
3.2.1. Linear Scalability
3.2.2. Linear Indiscriminate Problem
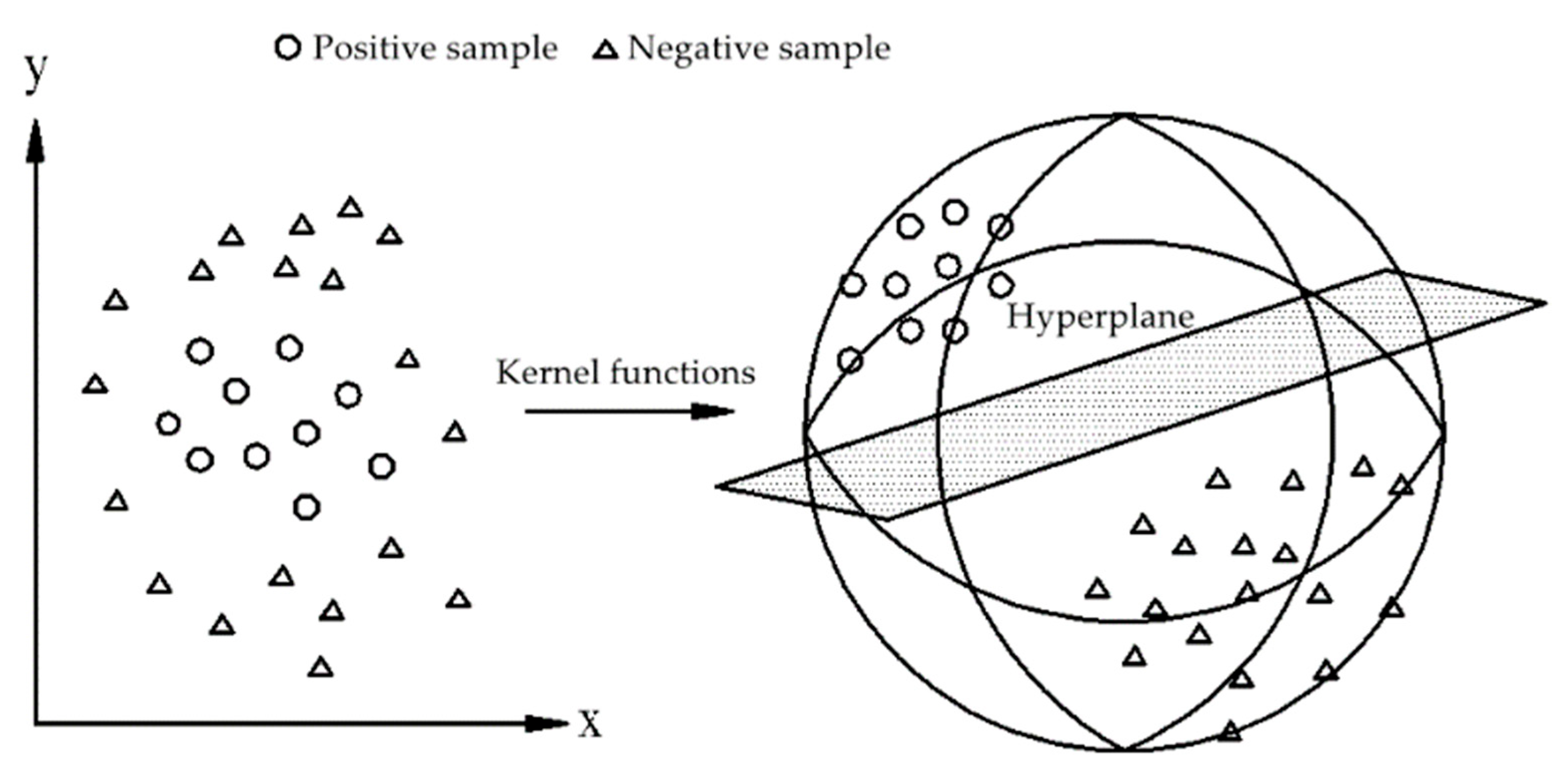
3.2.3. Low-Dimensional Space Nonlinear Problem
3.2.4. Solution of SVM in Multi-Class Classification Problem
4. An Example of Fault Classification Prediction and Result Analysis
4.1. Fault Case Analysis
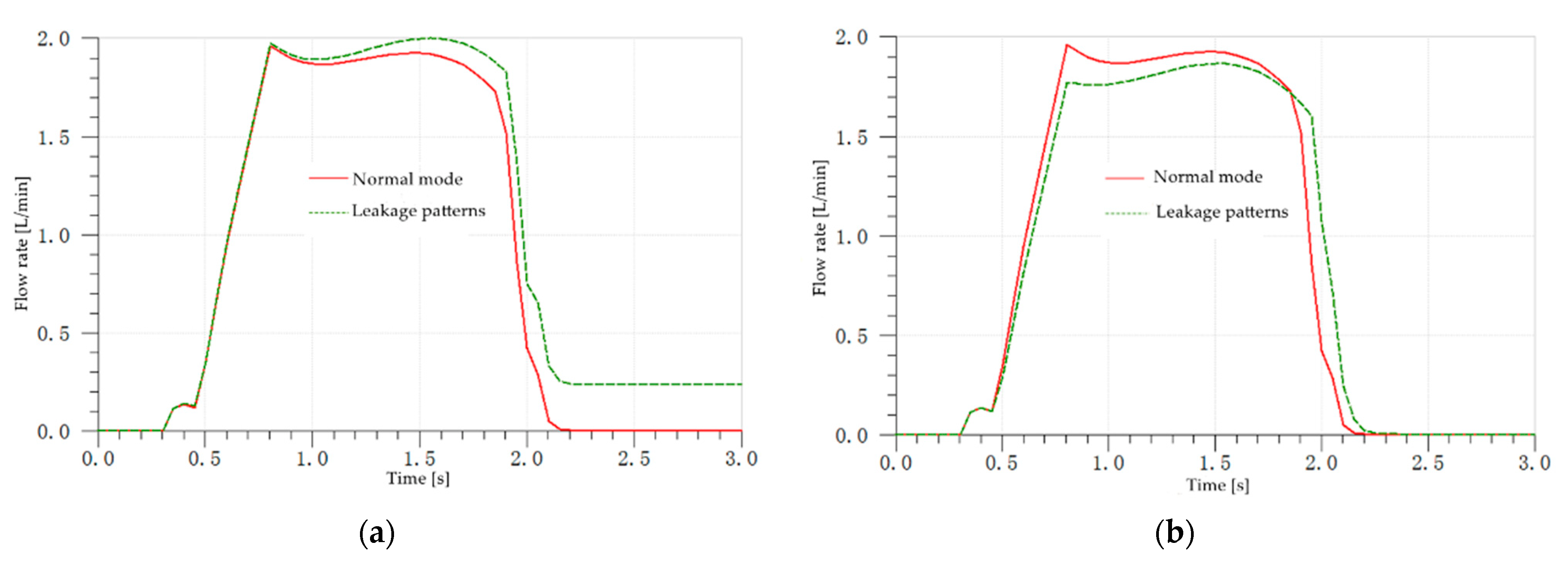
4.1.1. Normal Mode
4.1.2. Sealing Ring Damage and Leakage Fault
4.1.3. Oil Passage Blockage Fault
4.1.4. Proportional Valve Spool Jam Fault
4.2. Application of LibSVM in MATLAB
- Select “Matlab2013a\toolbox\libsvm3.23\windows” path in Matlab’s control window, establish a dataset “mat” file “truedatas.mat, faultdatas1.mat, faultdatas2.mat, faultdatas3.mat” and a category label set “lableset1.mat, lableset2.mat, lableset3.mat, lableset4.mat”.
- Making the training set and test set data, the call function mapminmax scaled the test set to the [0,1] section.
- Test Set Sample Training Requires calls Svmtrain function, model = svmtrain(training_label_vector, training_instance_matrix,’libsvm_options’);where libsvm_options options include SVM type, core function type, core function parameter selection. In this document model = svmtrain(train_set_labels, train_set, ‘-c 1 -g 0.07’);’-c 1 -g 0.07’ omitted the SVM type, the default is C-SVC, omitted the core function type, the default is the radial base RBF, the default value of the parameter C is 1, g default value 1/k (k is sample data) Dimension, this article k = 6), the fault tolerant factor is 0.07.
- Using the grid search method to find the optimal C and g combination, select the value setting for gamma in [0.001,0.01,0.1,1,10,100]: for C in [0.001,0.01,0.1,1,10,100]:, then call the command svm = SVC(gamma = gamma, C=C), conduct a training for each combination, and then find a large set of parameter values for the minimum error to find the value of g = 0.001, C = 100. This method is time consuming, but it can accurately find the best parameters. The prediction set is classified by the model described above, and the Svmpredict function, [predict_label] = svmpredict (test_set_labels, test_set, model); the predictive sample test_set is corresponding to the label set test_set_labels, and the classification correct rate can be calculated.
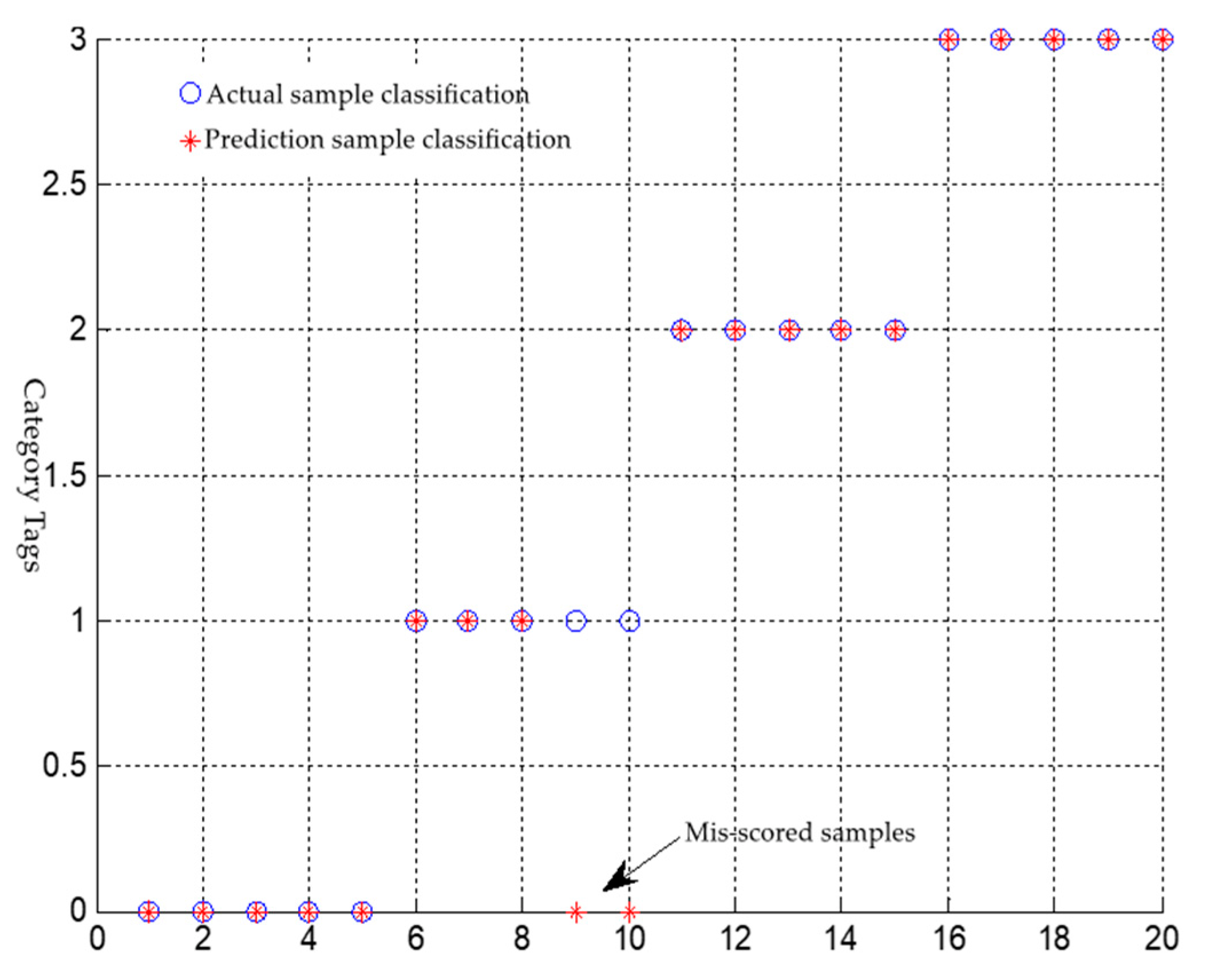
4.3. Test Results Analysis
4.4. Factors Affecting the Correctness of Classification
4.4.1. Training Sample Quantity
4.4.2. Penalty Coefficient C and Radial Basis Function (RBF) Parameters γ
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ebrahimi, E.; Javadikia, P.; Astan, N.; Heydari, M.; Jalili, M.H.; Zarei, A. Developing an Intelligent Fault Diagnosis of Mf285 Tractor Gearbox Using Genetic Algorithm and Vibration Signals. Mod. Mech. Eng. 2013, 3, 152–160. [Google Scholar] [CrossRef] [Green Version]
- Kaveh, M.; Hojat, A.; Mahmoud, O.; Reza, A. Vibration-based Fault Diagnosis of Hydraulic Pump of Tractor Steering System by Using Energy Technique. Mod. Appl. Sci. 2009, 3, 59–66. [Google Scholar]
- Hong, T.S.; Deng, C.J.; Mao, X.J.; Yu, S.H.; Wu, C.Y. The Development and Application of The Ontology for Tractor Fault Diagnosis. Int. J. Comput. Sci. Eng. 2017, 15, 112. [Google Scholar] [CrossRef]
- Chi, Y. Design and Implementation of The Fault Diagnosis Expert System for User-Oriented Hydraulic System. Master’s Thesis, Northeastern Agricultural University, Harbin, China, 2002. [Google Scholar]
- Lu, G. Research on Fault Diagnosis of Tractor Gearbox Gear Based on Wavelet-Genetic Algorithm. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2003. [Google Scholar]
- Wang, X. Application of Wavelet Analysis in Automatic Fault Diagnosis of Tractor Gearbox. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2002. [Google Scholar]
- Zhang, H.X.; Lei, Y. Application of BP Neural Network in Machinery Fault Diagnosis. Noise Vib. Control. 2008, 28, 95–97. [Google Scholar]
- Zhao, S. Research on Multi-Fault Diagnosis Method of Tractor Gearbox Based On SVM. Agric. Mech. Res. 2011, 33, 207–209. [Google Scholar]
- Wang, G.M.; Zhang, X.H.; Zhu, S.H.; Shi, L.X.; Zhong, C.Y. Hydraulic Fault Diagnosis of Tractor Hydraulic Mechanical Stepless Transmission. J. Agric. Eng. 2015, 31, 25–34. [Google Scholar]
- Mathur, A.; Foody, G.M. Multiclass and Binary SVM Classification: Implications for Training and Classification Users. IEEE Geosci. Remote Sens. Lett. 2008, 5, 241–245. [Google Scholar] [CrossRef]
- Song, Z.Q.; Chen, Y. An Overview of Multi-Class Classification Algorithms Based on Support Vector Machine. J. Nav. Aeronaut. Eng. Inst. 2015, 30, 442–446. [Google Scholar]
- Liu, T.X.; Bao, T.F.; Song, J.S.; Shen, S.L.; Liang, R.B.; Jiang, Y.Z. Research on The Prediction of Dam Lift Pressure by LIBSVM Model Based on Genetic Algorithm. J. Three Gorges Univ. 2013, 35, 24–28. [Google Scholar]
- Song, Z.X.; Li, J.; Sun, C.Y. Kernel Inverse Fisher Discriminant Analysis for Face Recognition. Neurocomputing 2014, 134, 46–52. [Google Scholar]
- Yuan, S.F.; Chu, F.L. Support Vector Machines-Based Fault Diagnosis for Turbo-Pump Rotor. Mech. Syst. Signal Process. 2006, 20, 939–952. [Google Scholar] [CrossRef]
- Li, H.B. Research on the Diagnosis and Fault Tolerance of Hybrid Passenger Car Power Assembly. Master’s Thesis, Dalian University of Technology, Dalian, China, 2014. [Google Scholar]
- Zhou, X.J. Research on Leakage Simulation and Fault Diagnosis of Hydraulic System Based on AMESim. Master’s Thesis, National University of Defense Science and Technology, Changsha, China, 2012. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Category | Fault Specific Name |
|---|---|
| Sensor | Input shaft speed, output shaft speed sensor, shift clutch position sensor, gear position sensor, oil source pressure sensor, etc. |
| Electronic control unit | Program run away |
| Electronic control element circuit | Solenoid valve failure, solenoid valve drive circuit failure, power failure, etc. |
| CAN communication | The Vehicle Controller Unit (VCU) cannot receive the TCU signal, a certain signal of the TCU is lost, the CAN bus is short-circuited to the ground/power supply, or the circuit is disconnected. |
| Common Error | Cause of Issue | Maintenance Method |
|---|---|---|
| Low system pressure, normal clutch leakage | 1. The oil level in the transmission oil pan is too low. 2. The spring of the pressure-regulating valve of the transmission control system is broken. 3. The spool of the pressure regulating valve is stuck. 4. The oil charge pump is working abnormally. | 1. Pour in the appropriate amount of oil. 2. Replace the spring on the pressure regulating valve. 3. Clean the spool and sleeve of the pressure regulating valve. 4. Examine and repair the charge pump. |
| Low system pressure and excessive clutch leakage | 1. The piston seal of the clutch cylinder is damaged or severely worn. 2. The oil seal at the connection between the clutch outer drum and the shaft is worn or damaged. 3. The oil pump works abnormally. | 1. Changing the sealing ring. 2. Changing the oil seal. 3. Replace or repair. |
| Transmission overheating | 1. The oil seal in the torque converter is worn, and the oil drain is too large. 2. The oil pump is worn. 3. The oil level in the transmission oil pan is too low. 4. The oil pump inlet line enters the air. | 1. Replacing the oil seal. 2. Oil pump replacement. 3. Increasing the quantity of oil. 4. Inspect the oil inlet pipe joint and tighten it. |
| Transmission is noisy | 1. The pump wheel is severely worn. 2. The oil pump is worn. 3. The bearing is severely worn or damaged. | 1. Changing the pump wheel. 2. Changing the oil pump. 3. Inspect the new bearing and replace it if necessary. |
| Low flow through cooler and low torque converter inlet pressure | 1. Torque converter safety valve spring is damaged. 2. A portion of the torque converter safety valve is opened. 3. The leakage in the torque converter is large. 4. The shift clutches oil seal is worn or damaged. | 1. Change the spring on the torque converter safety valve. 2. Examining the torque converter safety valve ball seat for wearing. 3. Inspect torque converter assembly parts and replace any that are severely worn. 4. Install a new clutch oil seal. |
| The flow through the cooler is small and the torque converter inlet pressure is high | 1. If the pressure of the gearbox lubricating oil is low, the cooler is blocked. 2. The oil return line of the cooler is partially blocked. 3. If the pressure of the gearbox lubricating oil is too high, the lubricating oil circuit is blocked. | 1. Vacuum the oil cooler. 2. Disinfect the oil return line. 3. Inspect transmission lubricating oil circuit and clear any clogged components. |
| Classify | Distinguish |
|---|---|
| One against rest (OAR) | OAR is the earliest and most frequently used method at present. Its basic principle is to construct k second-class classifiers (k is the number of classes) by taking a certain class of samples as one class and other classes as another. Samples have to be discriminated against by k classifiers and output k classification values. The determination of this method is that the number of training samples is large, and the calculation is complicated. |
| One against one (OAO) | The basic idea behind OAO is to create one SVM classifier for two types of samples at the same time, so k (k − 1)/2 classifiers are required for the classification of k samples. When testing, each of the two types is compared, and the calculation is complicated. In addition, there is a problem that the identical sample belongs to multiple types, and the classification accuracy is low. |
| Directed Acyclic Graph (DAG) | DAG is part of the extension of OAO. The distinction is located between the prediction stage, which requires only k − 1 discriminant functions for each test, and the execution stage, which requires k − 1 discriminant functions for each test. It is fast in calculation and avoids the disadvantage of inseparable samples. |
| Binary Tree Multi-class Classification Algorithm | Combining the binary decision tree with SVM, the multi-class samples are divided into two categories from the root node, and the two sub-nodes continue to divide their samples into two categories, and then go down until each sub-node contains one category. Each node is classified by a support vector machine classifier, which has the advantage of fast classification speed, but after a sample is disqualified at a certain node, the error will continue irreversibly. |
| Direct classification algorithm | The advantage of solving multi-class samples as a whole is that the number of constructed classifiers is small, but this method has no unified construction method, the training process is slow, and the classifier structure is complex. |
| Number | X | C | K | I | S | XP | Fault Type |
|---|---|---|---|---|---|---|---|
| 1 | 3.718150 | 1.632139 | 1.590318 | 2.580348 | 1.580960 | 13.51565 | T |
| 2 | 3.718159 | 1.632138 | 1.590307 | 2.579709 | 1.580570 | 12.59522 | T |
| 3 | 3.718169 | 1.632137 | 1.590282 | 2.578267 | 1.579688 | 13.51165 | T |
| 4 | 3.718181 | 1.632131 | 1.590258 | 2.576918 | 1.578867 | 13.50904 | T |
| 5 | 3.718202 | 1.632125 | 1.590208 | 2.574224 | 1.577222 | 13.50390 | T |
| 6 | 3.71822 | 1.632117 | 1.590165 | 2.571917 | 1.575816 | 13.49945 | T |
| 7 | 3.718262 | 1.632101 | 1.590082 | 2.567598 | 1.573186 | 13.49108 | T |
| 8 | 3.718278 | 1.632094 | 1.590050 | 2.565904 | 1.572154 | 13.48779 | T |
| 9 | 3.718323 | 1.632077 | 1.589977 | 2.562131 | 1.569859 | 13.48042 | T |
| 10 | 3.718379 | 1.632053 | 1.589894 | 2.557801 | 1.567229 | 13.47198 | T |
| 11 | 4.641408 | 1.308204 | 1.577676 | 1.361743 | 1.040926 | 8.232270 | F1 |
| 12 | 4.503738 | 1.348064 | 1.606603 | 1.425565 | 1.057490 | 8.814577 | F1 |
| 13 | 4.374942 | 1.387634 | 1.627415 | 1.497733 | 1.079342 | 9.403138 | F1 |
| 14 | 4.119849 | 1.473445 | 1.546716 | 1.635828 | 1.110206 | 10.30141 | F1 |
| 15 | 3.986659 | 1.522576 | 1.552947 | 1.756648 | 1.153734 | 10.73721 | F1 |
| 16 | 3.897091 | 1.557487 | 1.543815 | 1.870622 | 1.201051 | 11.49526 | F1 |
| 17 | 3.829932 | 1.584728 | 1.571876 | 1.988583 | 1.254842 | 11.92903 | F1 |
| 18 | 3.783049 | 1.604309 | 1.577237 | 2.106763 | 1.313190 | 12.33731 | F1 |
| 19 | 3.752768 | 1.617206 | 1.581351 | 2.219805 | 1.372617 | 12.67724 | F1 |
| 20 | 3.734874 | 1.624917 | 1.584432 | 2.322164 | 1.429097 | 12.94919 | F1 |
| 21 | 1.909045 | 1.032249 | 1.508721 | 1.032450 | 1.000194 | 2.479529 | F2 |
| 22 | 2.488536 | 1.094736 | 1.505060 | 1.154214 | 1.054331 | 6.068260 | F2 |
| 23 | 2.939103 | 1.285464 | 1.513321 | 1.594527 | 1.240429 | 10.45648 | F2 |
| 24 | 2.986767 | 1.456093 | 1.506423 | 2.011038 | 1.381119 | 11.75795 | F2 |
| 25 | 3.141969 | 1.459963 | 1.515589 | 2.058338 | 1.409856 | 12.32977 | F2 |
| 26 | 3.287192 | 1.513136 | 1.515163 | 2.162645 | 1.429247 | 12.45779 | F2 |
| 27 | 3.416444 | 1.539293 | 1.512336 | 2.294414 | 1.490563 | 12.93440 | F2 |
| 28 | 3.546686 | 1.540993 | 1.502323 | 2.297025 | 1.490613 | 12.94182 | F2 |
| 29 | 3.447888 | 1.628382 | 1.518066 | 2.557372 | 1.570499 | 13.39684 | F2 |
| 30 | 3.512039 | 1.629298 | 1.516488 | 2.575288 | 1.580612 | 13.47951 | F2 |
| 31 | 3.068556 | 1.992056 | 1.775022 | 1.230561 | 1.802556 | 13.50322 | F3 |
| 32 | 3.216002 | 1.965321 | 1.875665 | 1.235621 | 1.892003 | 13.65206 | F3 |
| 33 | 3.055541 | 2.065384 | 1.802653 | 1.236654 | 1.596455 | 13.56332 | F3 |
| 34 | 3.116501 | 2.105387 | 1.794685 | 1.240051 | 1.792058 | 13.47669 | F3 |
| 35 | 3.120565 | 1.869322 | 1.824625 | 1.189985 | 1.903255 | 13.50566 | F3 |
| 36 | 3.142652 | 1.956588 | 1.778062 | 1.239856 | 1.946623 | 13.51229 | F3 |
| 37 | 3.050289 | 1.899231 | 1.826452 | 1.236488 | 1.885236 | 13.53656 | F3 |
| 38 | 3.10036 | 2.135655 | 1.926565 | 1.424886 | 1.92556 | 13.30886 | F3 |
| 39 | 3.021056 | 2.056674 | 1.881202 | 1.232301 | 1.702314 | 13.59933 | F3 |
| 40 | 3.002123 | 2.092635 | 1.702188 | 1.24552 | 1.95956 | 13.55699 | F3 |
| Model | X | C | K | L |
|---|---|---|---|---|
| F1 and T | 0.023192 | 0.021835 | 0.003533 | 0.093898 |
| F2 and T | 0.076661 | 0.017363 | 3.253002 | 0.031308 |
| F3 and T | 1.369812 | 0.245968 | 0.177200 | 6.105690 |
| Training Samples/Groups | C 1 | γ 2 | Support Vector/Each | Test Samples/Groups | Misdiagnosed Samples/Groups | Accuracy Rate/% |
|---|---|---|---|---|---|---|
| 6 | 32 | 0.0078125 | 5 | 20 | 2 | 90 |
| 10 | 1024 | 0.03125 | 8 | 20 | 2 | 90 |
| 15 | 512 | 0.5 | 14 | 20 | 2 | 90 |
| 20 | 2048 | 0.5 | 14 | 20 | 1 | 95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, H.; Lu, L.; Sun, M.; Bai, X.; Yin, Y. Research on Fault Diagnosis of PST Electro-Hydraulic Control System of Heavy Tractor Based on Support Vector Machine. Processes 2022, 10, 791. https://doi.org/10.3390/pr10040791
Ni H, Lu L, Sun M, Bai X, Yin Y. Research on Fault Diagnosis of PST Electro-Hydraulic Control System of Heavy Tractor Based on Support Vector Machine. Processes. 2022; 10(4):791. https://doi.org/10.3390/pr10040791
Chicago/Turabian StyleNi, Huiting, Liqun Lu, Meng Sun, Xin Bai, and Yongfang Yin. 2022. "Research on Fault Diagnosis of PST Electro-Hydraulic Control System of Heavy Tractor Based on Support Vector Machine" Processes 10, no. 4: 791. https://doi.org/10.3390/pr10040791
APA StyleNi, H., Lu, L., Sun, M., Bai, X., & Yin, Y. (2022). Research on Fault Diagnosis of PST Electro-Hydraulic Control System of Heavy Tractor Based on Support Vector Machine. Processes, 10(4), 791. https://doi.org/10.3390/pr10040791