
Stochastic Stabilization for Discrete-Time System with Input Delay and Multiplicative Noise in Control Variable


Abstract
:1. Introduction
2. Problem Formulation and Preliminaries
- (a)
- System is stabilizable in the mean square sense, if and only if there admit K and satisfying the following equation
- (b)
- System is stabilizable in the mean square sense, if and only if there exists a constant matrix K such that .
- (c)
- The mean square stabilization of system is equivalent to that of the following delay free system
- (d)
- The mean square stabilizable of system is equivalent to the following DAREadmits a unique stabilizing solution , where L and U satisfy (9).
3. The Necessary Condition of Asymptotic Mean Square Stabilization
- (a)
- For any ,
- (b)
- If , then,
- (c)
- For system , define and , then, for any ,
4. Critical Stabilization
- (i)
- System is critical stabilization.
- (ii)
- There exists matrix K, , such that for any and , the following DLEadmits a unique positive solution , .
- (iii)
- There exists matrix K, , such that for any , the following inequalityadmits a positive solution , .
- (iv)
- There exists matrices K, , such that for any and , the following inequalityadmits a unique solution , .
5. Essential Destabilization
- Matrix has column full rank.
- Matrix is invertible.
- (i)
- When , V is a column full rank matrix. Since V is not a negative definite matrix, V must have a positive eigenvalue.
- (ii)
- When , for any non-zero , pre-multiplying and post-multiplying on both sides of (36), we have
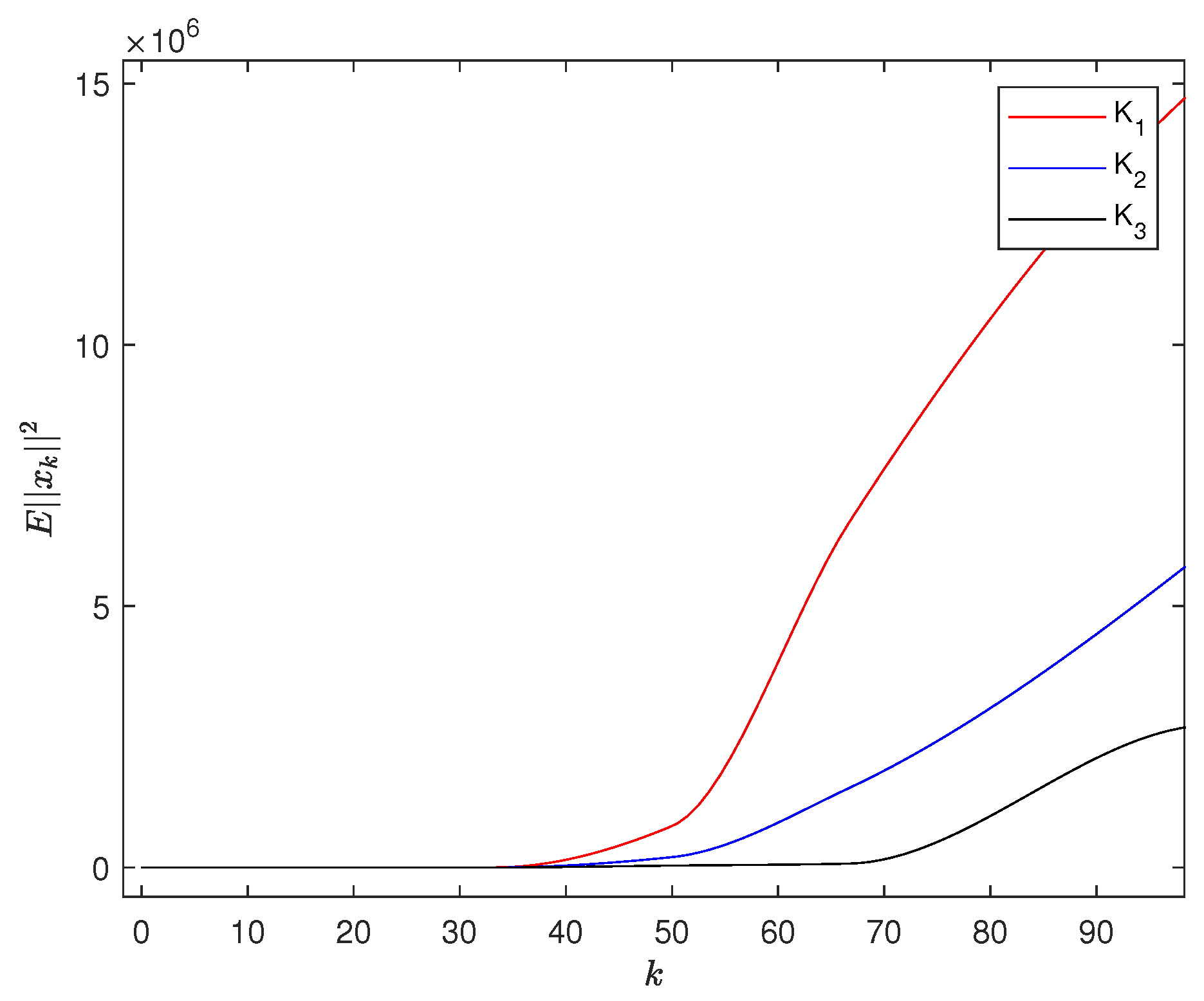
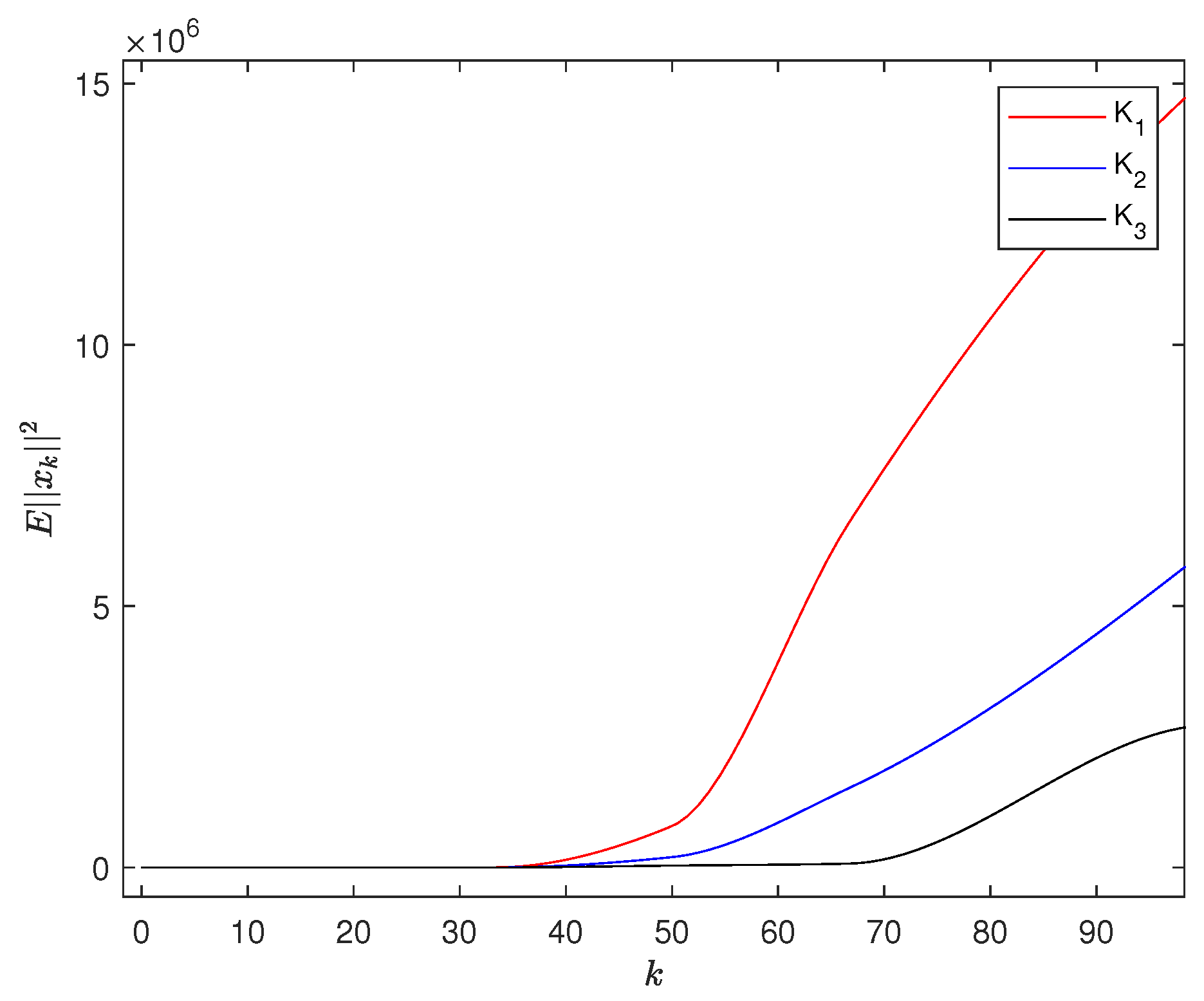
6. Simulation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, L.; Xie, X. State feedback stabilization for stochastic feedforward nonlinear systems with time-varying delay. Automatica 2013, 49, 936–942. [Google Scholar] [CrossRef]
- Zhang, H.; Li, L.; Xu, J.; Fu, M.Y. Linear quadratic regulation and stabilization of discrete-time systems with delay and multiplicative noise. IEEE Trans. Autom. Control 2015, 60, 2599–2613. [Google Scholar] [CrossRef]
- Mesbah, A. Stochastic model predictive control: An overview and perspectives for future research. IEEE Control Syst. Mag. 2016, 36, 30–44. [Google Scholar]
- Jiang, X.; Zhao, D. Event-triggered fault detection for nonlinear discrete-time switched stochastic systems: A convex function method. Sci. China Inform. Sci. 2021, 64, 200204. [Google Scholar] [CrossRef]
- Zhang, T.; Deng, F.; Sun, Y.; Shi, P. Fault estimation and fault-tolerant control for linear discrete time-varying stochastic systems. Sci. China Inform. Sci. 2021, 64, 200201. [Google Scholar] [CrossRef]
- Wang, Z.; Ho, D.W.C.; Liu, Y.; Liu, X. Robust H∞ control for a class of nonlinear discrete time-delay stochastic systems with missing measurements. Automatica 2009, 45, 684–691. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Guay, M.; Huang, B.; Fisher, D.G. Delay-Dependent Robust H∞ Control of Uncertain Linear Systems with Input Delay. In Proceedings of the American Control Conference, San Diego, CA, USA, 2–4 June 1999. [Google Scholar]
- Zhao, C.-R.; Zhang, K.; Xie, X.-J. Output feedback stabilization of stochastic feedforward nonlinear systems with input and state delay. Int. J. Robust Nonlinear Control 2016, 26, 1422–1436. [Google Scholar] [CrossRef]
- Krstic, M. Delay Compensation for Nonlinear, Adaptive, and PDE Systems; Birkhäuser Boston: Boston, MA, USA, 2009. [Google Scholar]
- Cacace, F.; Germani, A.; Manes, C. Exponential stabilization of linear systems with time-varying delayed state feedback via partial spectrum assignment. Syst. Control Lett. 2014, 69, 47–52. [Google Scholar] [CrossRef]
- Hou, T.; Zhang, W.; Ma, H. Conditions for essential instability and essential destabilization of linear stochastic systems. In Proceedings of the World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 1770–1775. [Google Scholar]
- Hou, T.; Ma, H. A small gain theorem for discrete-time stochastic periodic systems. In Proceedings of the IEEE International Conference on Control and Automation, Kathmandu, Nepal, 1–3 June 2016; pp. 282–287. [Google Scholar]
- Hou, T.; Zhang, W.; Chen, B.S. Regional stability and stabilizability of linear stochastic systems: Discrete-time case. In Proceedings of the IEEE International Conference on Control and Automation, Xiamen, China, 9–11 June 2010; pp. 1660–1665. [Google Scholar]
- Peaucelle, D.; Arzelier, D.; Bachelier, O.; Bernussou, J. A new robust D-stability condition for real convex polytopic uncertainty. Syst. Control Lett. 2000, 40, 21–30. [Google Scholar] [CrossRef]
- Dragan, V.; Morozan, T. Observability and detectability of a class of discrete-time stochastic linear systems. IMA J. Math. Control Inform. 2006, 23, 371–394. [Google Scholar] [CrossRef]
- Tan, C.; Zhang, H.; Wong, W.S. Delay-dependent algebraic Riccati equation to stabilization of networked control systems: Continuous-time case. IEEE Trans. Cybern. 2018, 48, 2783–2794. [Google Scholar] [CrossRef] [PubMed]
- Tan, C.; Zhang, H. Necessary and sufficient stabilizing conditions for networked control systems with simultaneous transmission delay and packet dropout. IEEE Trans. Autom. Control 2017, 62, 4011–4016. [Google Scholar] [CrossRef]
- Zhang, H.; Xie, L. Linear quadratic regulation for discrete-time systems with multiplicative noises and input delays. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 1718–1723. [Google Scholar]
- Sipahi, R.; Niculescu, S.-I.; Abdallah, C.T.; Michiels, W.; Gu, K. Stability and Stabilization of Systems with Time Delay. IEEE Control Syst. Mag. 2011, 31, 38–65. [Google Scholar]
- Zhang, W.; Zhang, H.; Chen, B.S. Generalized Lyapunov Equation Approach to State-Dependent Stochastic Stabilization/Detectability Criterion. IEEE Trans. Autom. Control 2008, 53, 1630–1642. [Google Scholar] [CrossRef]
- Hou, T.; Zhang, W.; Ma, H. Essential instability and essential destabilisation of linear stochastic systems. IET Control Theory Appl. 2011, 5, 334–340. [Google Scholar] [CrossRef]
- Freiling, G.; Jank, G.; Abou-Kandil, H. Generalized Riccati difference and differential equations. Linear Algebra Its Appl. 1996, 241, 291–303. [Google Scholar] [CrossRef] [Green Version]
- Ran, A.C.M.; Vreugdenhil, R. Existence and comparison theorems for algebraic Riccati equations for continuous- and discrete-time systems. Linear Algebra Its Appl. 1988, 99, 63–83. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Zhang, W.; Zhang, H. Infinite horizon linear quadratic optimal control for discrete-time stochastic systems. Asian J. Control 2008, 10, 608–615. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, B.S. On stabilizability and exact observability of stochastic systems with their applications. Automatica 2004, 40, 87–94. [Google Scholar] [CrossRef]
- Rami, M.A.; Zhou, X.Y. Linear Matrix Inequalities, Riccati Equations, and Indefinite Stochastic Linear Quadratic Controls. IEEE Trans. Autom. Control 2000, 45, 1131–1143. [Google Scholar] [CrossRef]
- Feng, Y.; Anderson, B.D.O. An iterative algorithm to solve state-perturbed stochastic algebraic Riccati equations in LQ zero-sum games. Syst. Control Lett. 2010, 59, 50–56. [Google Scholar] [CrossRef]
- Rami, M.A.; Chen, X.; Moore, J.B.; Zhou, X.Y. Solvability and asymptotic behavior of generalized Riccati equations arising in indefinite stochastic LQ controls. IEEE Trans. Autom. Control 2002, 46, 428–440. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.; Yang, L.; Zhang, F.; Zhang, Z.; Wong, W.S. Stabilization of discrete time stochastic system with input delay and control dependent noise. Syst. Control Lett. 2019, 123, 62–68. [Google Scholar] [CrossRef]
- Tan, C.; Wong, W.S.; Zhang, H. On delay-dependent algebraic Riccati equation. IET Control Theory Appl. 2017, 11, 2506–2513. [Google Scholar] [CrossRef]
- Hou, T.; Zhang, W.; Chen, B.S. Study on general stability and stabilizability of linear discrete-time stochastic systems. Asian J. Control 2011, 13, 977–987. [Google Scholar] [CrossRef]

{kind=link}
| A | B | C | |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 |
| H | Z | ||
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 |
| N | ||
|---|---|---|
| 1 | > 0 | 11 |
| 2 | > 0 | 27 |
| 3 | > 0 | 19 |
| K | ||||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, C.; Di, J.; Xiang, M.; Chen, Z.; Zhu, B. Stochastic Stabilization for Discrete-Time System with Input Delay and Multiplicative Noise in Control Variable. Processes 2022, 10, 989. https://doi.org/10.3390/pr10050989
Tan C, Di J, Xiang M, Chen Z, Zhu B. Stochastic Stabilization for Discrete-Time System with Input Delay and Multiplicative Noise in Control Variable. Processes. 2022; 10(5):989. https://doi.org/10.3390/pr10050989
Chicago/Turabian StyleTan, Cheng, Jianying Di, Mingyue Xiang, Ziran Chen, and Binlian Zhu. 2022. "Stochastic Stabilization for Discrete-Time System with Input Delay and Multiplicative Noise in Control Variable" Processes 10, no. 5: 989. https://doi.org/10.3390/pr10050989
APA StyleTan, C., Di, J., Xiang, M., Chen, Z., & Zhu, B. (2022). Stochastic Stabilization for Discrete-Time System with Input Delay and Multiplicative Noise in Control Variable. Processes, 10(5), 989. https://doi.org/10.3390/pr10050989