
Surrogate-Assisted Multi-Objective Optimization of a Liquid Oxygen Vacuum Subcooling System Based on Ejector and Liquid Ring Pump


Abstract
:1. Introduction
2. Methodology
2.1. Heat and Mass Balance of the Vacuumed Subcooling Process
2.2. Validation of the Simulation Method
2.3. Surrogate Based Multi-Optimization
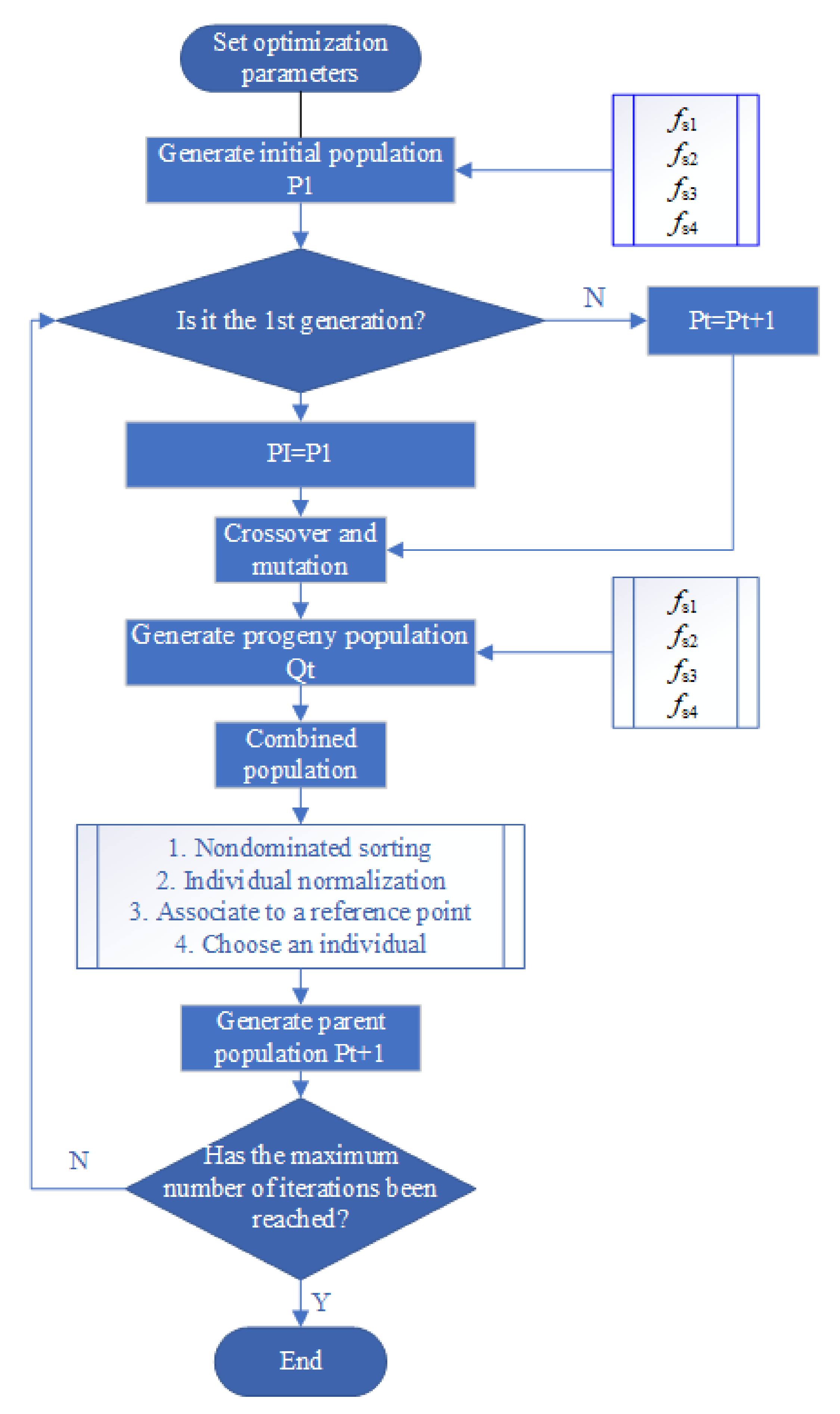
2.4. Many-Objective Optimization Algorithm NSGA-III
3. Results and Discussion
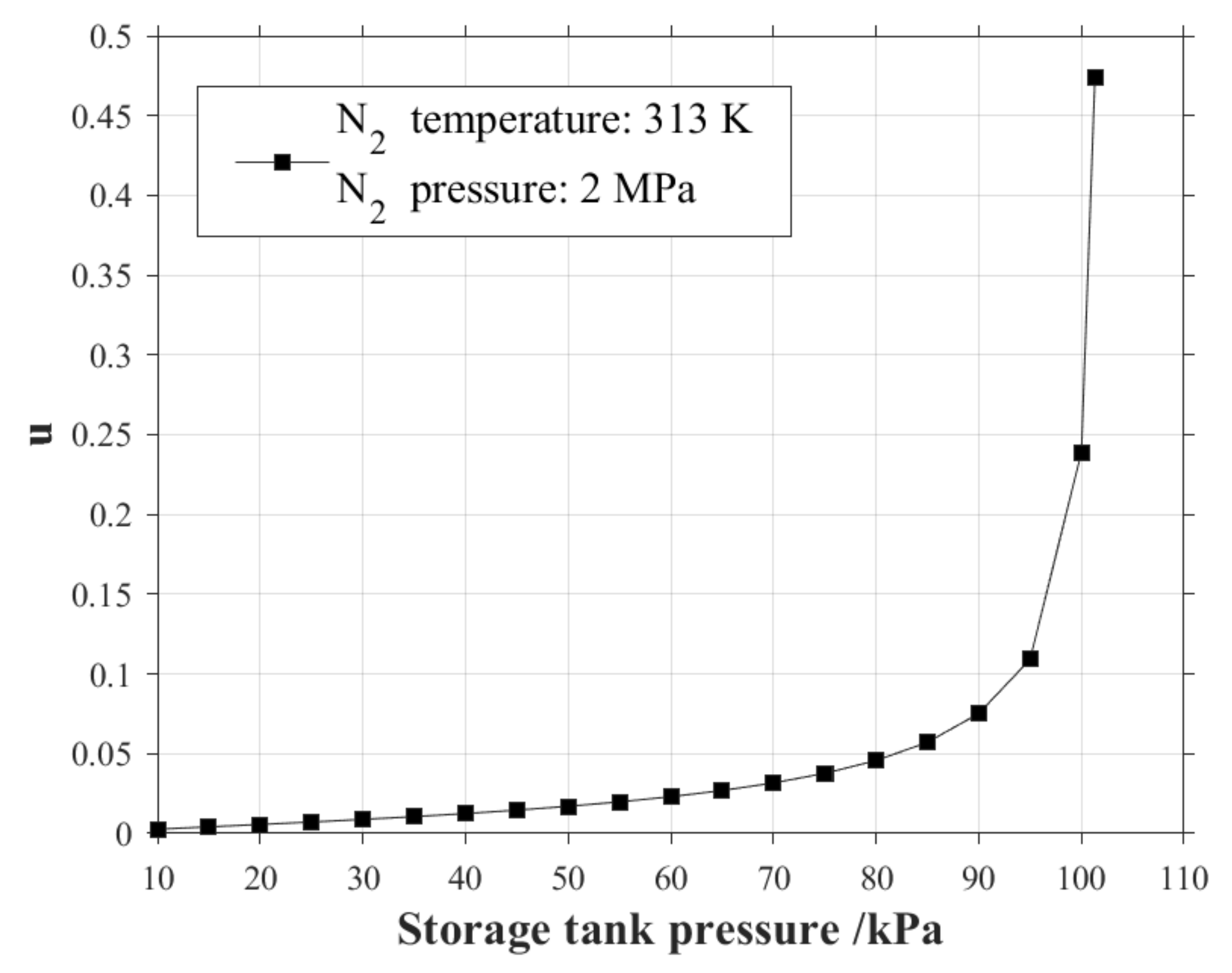
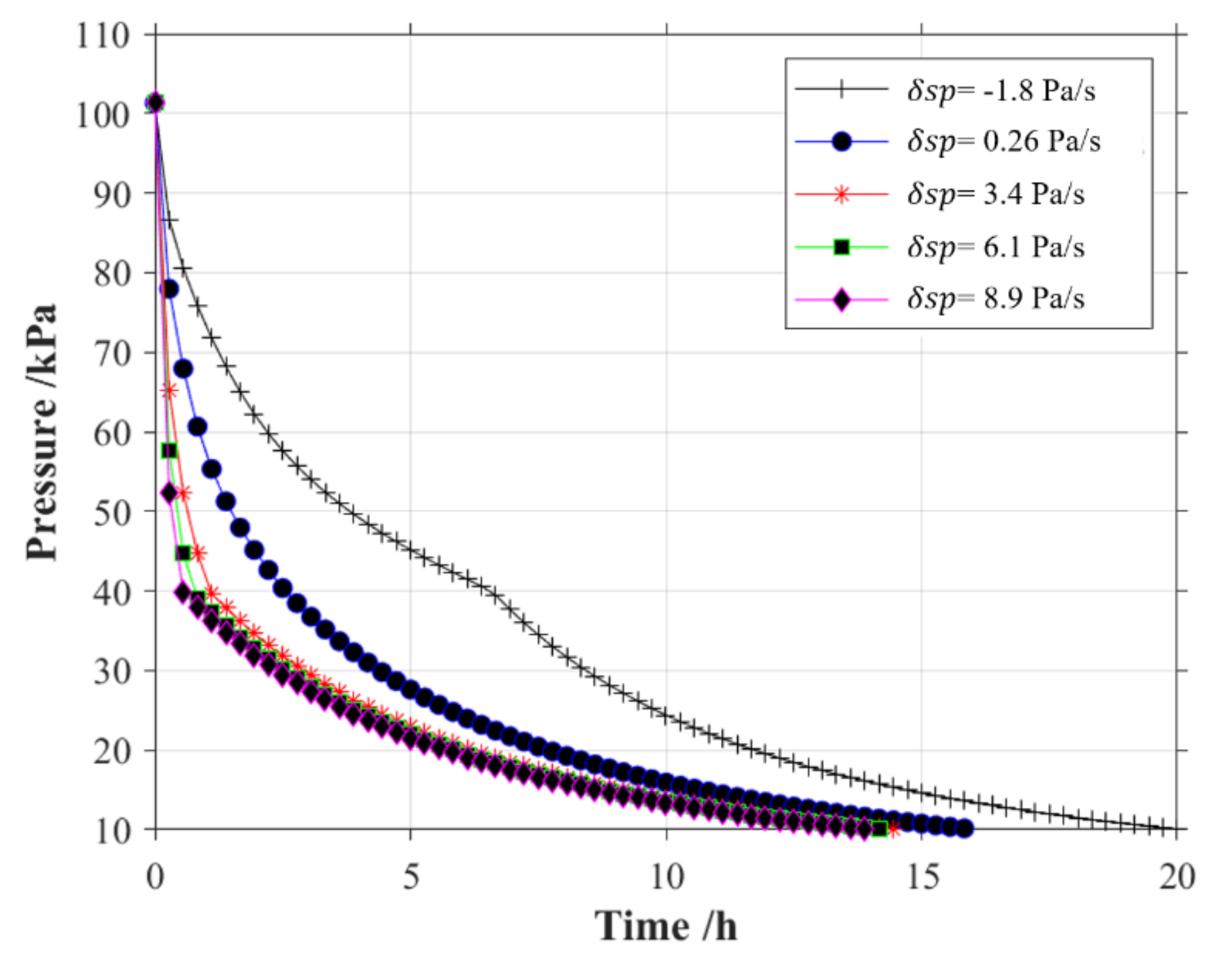
3.1. The Simulation Results
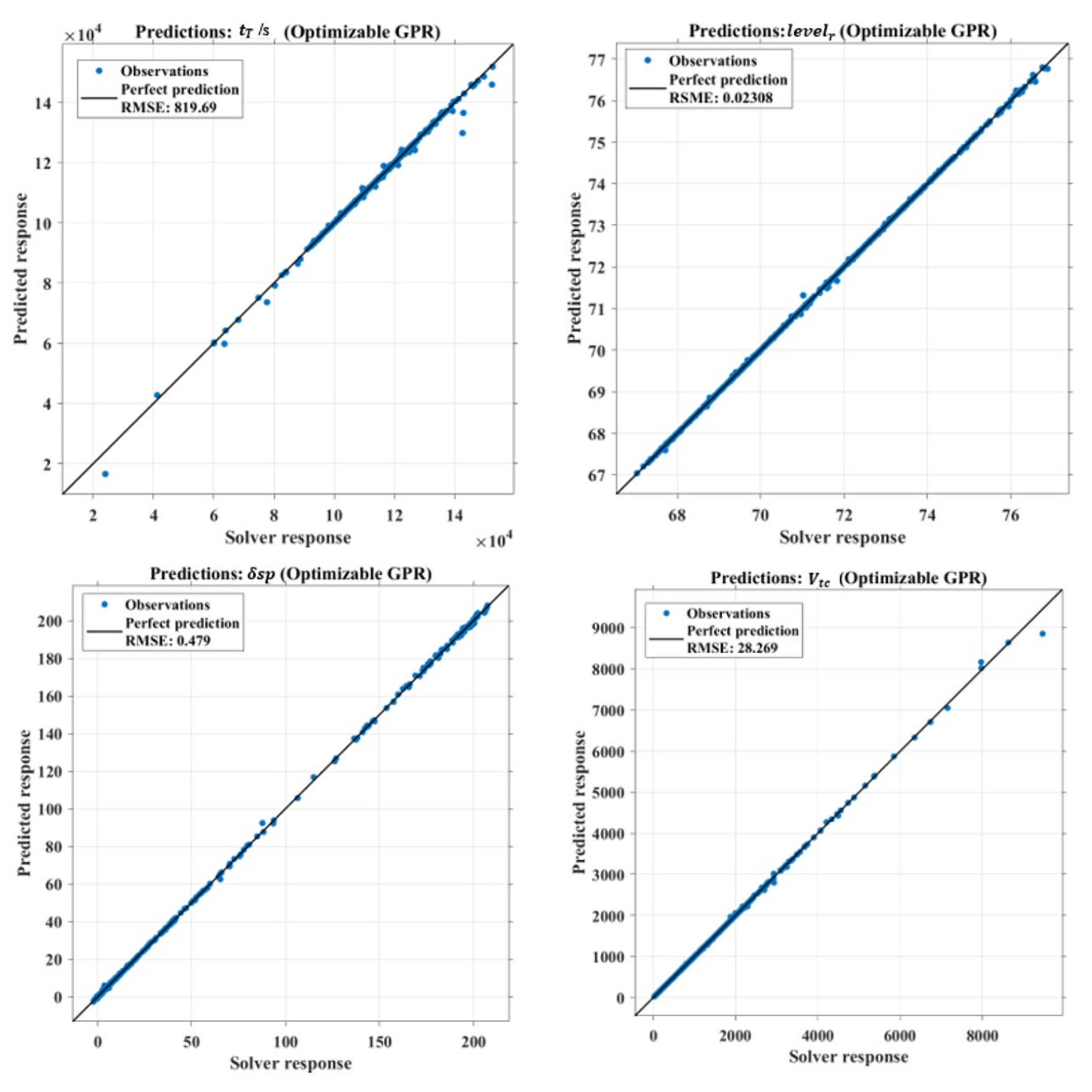
3.2. Surrogate Model Performance
3.3. Analysis of Optimization Results
3.4. Pearson Correlation Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
| Algorithm A1: “Generation” t “of NSGA-III Procedure” |
| Input: structured reference points or supplied aspiration points , parent population 15: Associate each member of with a reference point: Associate closest reference point, : distance between and 16: Compute niche count of reference point j ∈ Zr : ρj = ∑s∈st/F1 ((π(s) = j) 1:0) 17: Choose members one at a time from to construct Niching 18: end if |
Appendix B. Pearson Linear Correlation of All Variables
| mN2 | . | ||||||||
| 1 | 0.362 | 0.033 | 0.049 | 0.048 | −0.209 | 0.060 | 0.339 | 0.025 | |
| 0.362 | 1 | 0.290 | 0.210 | 0.005 | −0.024 | 0.213 | 0.448 | −0.194 | |
| 0.033 | 0.290 | 1 | 0.443 | −0.037 | 0.714 | 0.414 | 0.835 | −0.835 | |
| 0.049 | 0.210 | 0.443 | 1 | −0.486 | 0.482 | 0.999 | 0.365 | −0.250 | |
| 0.0482 | 0.005 | −0.037 | −0.486 | 1 | −0.371 | −0.494 | 0.059 | −0.028 | |
| −0.209 | −0.024 | 0.714 | 0.482 | −0.371 | 1 | 0.448 | 0.436 | −0.802 | |
| 0.060 | 0.213 | 0.415 | 0.999 | −0.494 | 0.448 | 1 | 0.347 | −0.216 | |
| 0.339 | 0.448 | 0.835 | 0.365 | 0.059 | 0.436 | 0.347 | 1 | −0.563 | |
| 0.0255 | −0.194 | −0.835 | −0.250 | −0.028 | −0.802 | −0.216 | −0.563 | 1 |
References
- Pengfei, A.D. Cryogenic Filling System for Launch Site of Launch Vehicle; Beijing Institute of Space Launch Technology: Beijing, China, 2011. [Google Scholar]
- Xie, F.; Li, Y.; Wang, L. Study on subcooled technology for cryogenic propellants. J. Aerosp. Power 2017, 32, 762–768. [Google Scholar]
- Xie, F.; Li, Y.; Wang, L.; Lei, G. Analysis on utilization of cooling capacity for ground loading system of cryogenic propellants. J. Astronaut. 2016, 37, 1381–1387. [Google Scholar]
- Fehling, N.W. Liquid Cryogenic System; Cryogenic Engineering Editorial Department: Beijing, China, 1993. [Google Scholar]
- Tomsik, T. Performance tests of a liquid hydrogen propellant densification ground support system for the X33/RLV. In Proceedings of the 33rd AIAA/ASME/ASEE Joint Propulsion Conference & Exhibit, Reston, VA, USA, 6–9 July 1997. [Google Scholar]
- Lak, T.; Lozano, M.; Neary, D. Propellant densification without use of rotating machinery. In Proceedings of the 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Indianapolis, IN, USA, 7–10 July 2002; p. 2976. [Google Scholar]
- SpaceX Announces Possible Cause of Falcon 9 Explosion on September 1. Available online: https://www.popularmechanics.com/space/rockets/a23020/spacex-rocket-explosion-cause/ (accessed on 18 October 2021).
- Zuo, Z.; Jiang, W.; Pan, P.; Qin, X.; Huang, Y. Quasi-equilibrium evaporation characteristics of oxygen in the liquid–vapor interfacial region. Int. Commun. Heat Mass Transf. 2021, 129, 105697. [Google Scholar] [CrossRef]
- Safari, F.; Dincer, I. Assessment and optimization of an integrated wind power system for hydrogen and methane production. Energy Convers. Manag. 2018, 177, 693–703. [Google Scholar] [CrossRef]
- Khan, M.S.; Karimi, I.; Lee, M. Evolution and optimization of the dual mixed refrigerant process of natural gas liquefaction. Appl. Therm. Eng. 2016, 96, 320–329. [Google Scholar] [CrossRef]
- Song, R.; Cui, M.; Liu, J. Single and multiple objective optimization of a natural gas liquefaction process. Energy 2017, 124, 19–28. [Google Scholar] [CrossRef]
- Mofid, H.; Jazayeri-Rad, H.; Shahbazian, M.; Fetanat, A. Enhancing the performance of a parallel nitrogen expansion liquefaction process (nelp) using the multi-objective particle swarm optimization (mopso) algorithm. Energy 2019, 172, 286–303. [Google Scholar] [CrossRef]
- Díaz-Manríquez, A.; Toscano, G.; Barron-Zambrano, J.H.; Tello-Leal, E. A review of surrogate assisted multiobjective evolutionary algorithms. Comput. Intell. Neurosci. 2016, 2016, 1–14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tan, H.; Zhao, Q.; Sun, N.; Li, Y. Enhancement of energy performance in a boil-off gas re-liquefaction system of LNG carriers using ejectors. Energy Convers. Manag. 2016, 126, 875–888. [Google Scholar] [CrossRef]
- Viana, F.A.C.; Venter, G.; Balabanov, V. An algorithm for fast optimal Latin hypercube design of experiments. Int. J. Numer. Methods Eng. 2010, 82, 135–156. [Google Scholar] [CrossRef] [Green Version]
- Neter, J.; Kutner, M.H.; Nachtsheim, C.J.; Wasserman, W. Applied Linear Statistical Models; IRWIN, The McGraw-Hill Companies, Inc.: Martinsville, OH, USA, 1996. [Google Scholar]
- Breiman, L.; Friedman, J.; Olshen, R.; Stone, C. Classification and Regression Trees; CRC Press: Boca Raton, FL, USA, 1984. [Google Scholar]
- Schölkopf, B.; Mika, S.; Burges, C.J.C.; Knirsch, P.; Muller, K.R.; Ratsch, G.; Smola, A.J. Input space versus feature space in kernel-based methods. IEEE Trans. Neural Netw. 1999, 10, 1000–1017. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Lucchese, C.; Nardini, F.M.; Orlando, S.; Perego, R.; Tonellotto, N.; Venturini, R. A Fast algorithm to rank documents with additive ensembles of regression trees. In Proceedings of the 38th International ACM SIGIR Conference on Research and Development in Information Retrieval, Santiago, Chile, 9–13 August 2015; pp. 73–82. [Google Scholar]
- Li, L.; Jamieson, K.; DeSalvo, G.; Rostamizadeh, A.; Talwalkar, A. Hyperband: A novel bandit-based approach to hyperparameter optimization. J. Mach. Learn. Res. 2018, 18, 6765–6816. [Google Scholar]
- Deb, K.; Jain, H. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point-Based Nondominated Sorting Approach, Part I: Solving Problems with Box Constraints. Evolutionary Computation. IEEE Trans. 2014, 18, 577–601. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engineering Conditions | Limitation |
|---|---|
| Storage of N2 (Nm3) | 2300 |
| Available motor power (kW) | <110 |
| Total vacuuming time (h) | <24 |
| Volume of LO2 tank (m3) | 60 |
| Optimization Variables | Sampling Lower Bound | Sampling Upper Bound |
|---|---|---|
| (kg/s) | 0.1 | 1 |
| (MPa) | 1 | 5 |
| (kPa) | 10 | 90 |
| (%) | 83 | 95 |
| (m3/min) | 5 | 25 |
| Regression Response | Linear Regression | Regression Trees | Support Vector Machine | Gaussian Process Regression | Ensemble Trees |
|---|---|---|---|---|---|
| (s) | 0.83 | 0.68 | 0.94 | 0.95 | 0.64 |
| (%) | 1.0 | 1.0 | 0.99 | 1 | 0.77 |
| (Pa/s) | 0.84 | 0.72 | 0.97 | 0.99 | 0.87 |
| (Sm3) | 0.96 | 0.77 | 0.99 | 1 | 0.91 |
| Option | Value |
|---|---|
| Reference point number | 50 |
| Number of iterations | 100 |
| Population size | 100 |
| Crossover percentage | 50% |
| Mutation percentage | 50% |
| Mutation rate | 0.02 |
| Mutation step | 0.5 |
| Original RMSE | Optimized RMSE | Improvement Rate | |
|---|---|---|---|
| 2557.6 | 819.69 | −67.95% | |
| 0.0315 | 0.02308 | −26.73% | |
| 0.42 | 0.479 | +14.04% | |
| 37.67 | 28.269 | −24.95% |
| Case | (kg/s) | (kPa) | (m3/min) | (s) | (Pa/s) | (Nm3) | |||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 5 | 16.56 | 86.97 | 15.05 | 65,968 | 70.75 | 1.16 | 2152.42 |
| 2 | 1 | 5 | 16.09 | 91.99 | 12.96 | 71,756 | 74.84 | 1.18 | 2267.3 |
| 3 | 1 | 5 | 19.45 | 92.95 | 13.25 | 84,127 | 75.54 | 2.02 | 1350.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, H.; Wu, H.; Zhang, Q.; Lei, G.; Chen, Q. Surrogate-Assisted Multi-Objective Optimization of a Liquid Oxygen Vacuum Subcooling System Based on Ejector and Liquid Ring Pump. Processes 2022, 10, 1188. https://doi.org/10.3390/pr10061188
Tan H, Wu H, Zhang Q, Lei G, Chen Q. Surrogate-Assisted Multi-Objective Optimization of a Liquid Oxygen Vacuum Subcooling System Based on Ejector and Liquid Ring Pump. Processes. 2022; 10(6):1188. https://doi.org/10.3390/pr10061188
Chicago/Turabian StyleTan, Hongbo, Hao Wu, Qing Zhang, Gang Lei, and Qiang Chen. 2022. "Surrogate-Assisted Multi-Objective Optimization of a Liquid Oxygen Vacuum Subcooling System Based on Ejector and Liquid Ring Pump" Processes 10, no. 6: 1188. https://doi.org/10.3390/pr10061188