

Determining the Drawing Force in a Wire Drawing Process Considering an Arbitrary Hardening Law
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
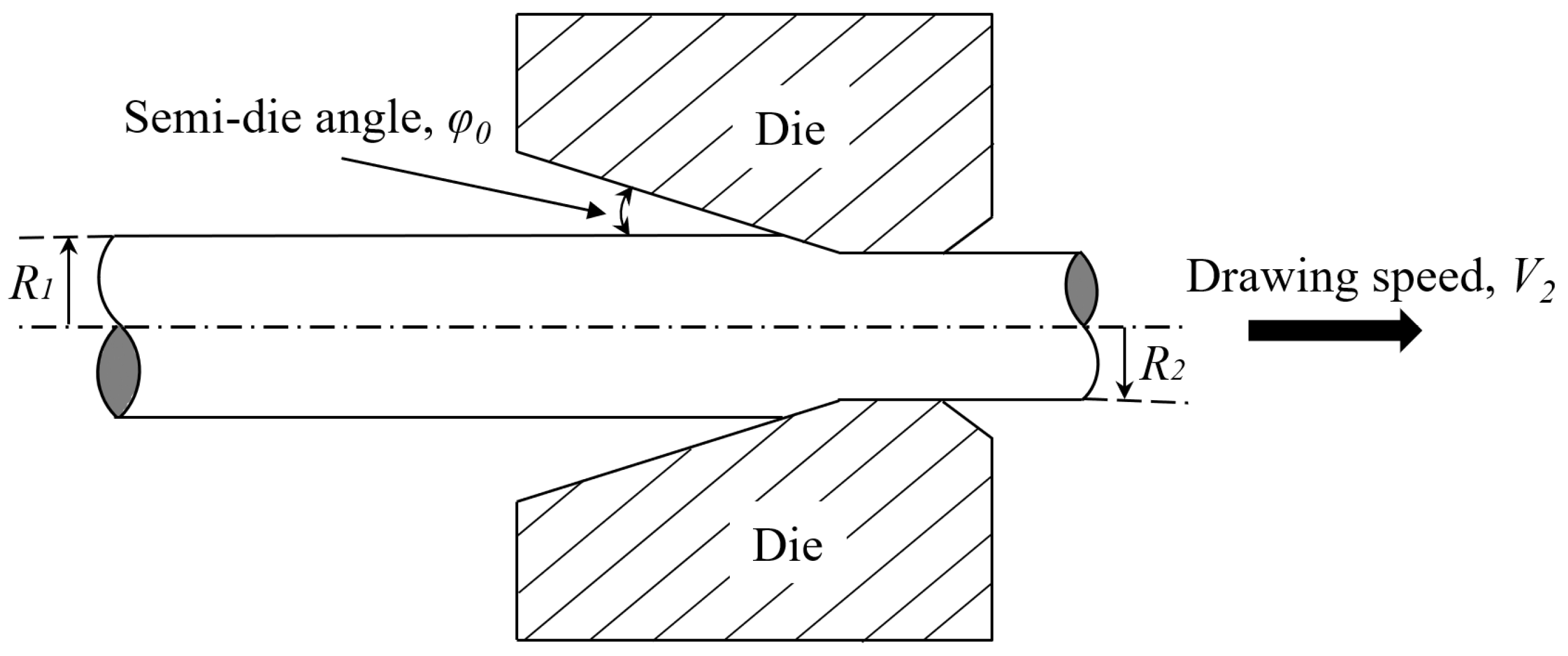
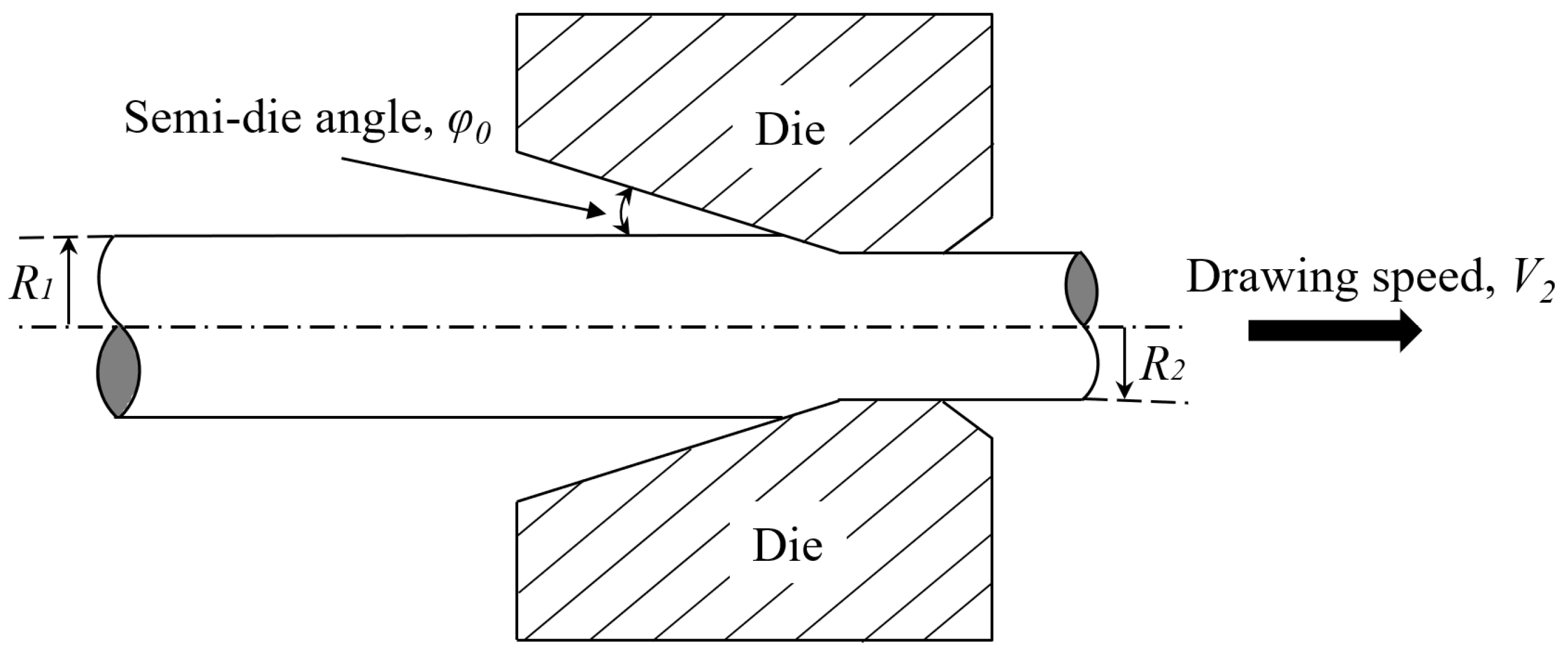
2. Statement of the Problem
3. Kinematically Admissible Velocity Field
3.1. Kinematically Admissible Velocity Field in the Plastic Region
3.2. Velocity Discontinuity Lines
4. Plastic Work Rate
4.1. Plastic Work Rate in the Plastic Region
4.2. Plastic Work Rate at the Velocity Discontinuity Surfaces
4.3. Plastic Work Rate at the Friction Surface
5. Drawing Force
6. Numerical Examples
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, Y.C.; Kim, B.M. A study on the corner filling in the drawing of a rectangular rod from a round bar. Int. J. Mach. Tools Manuf. 2000, 40, 2099–2117. [Google Scholar] [CrossRef]
- Felder, E.; Levrau, C.; Mantel, M.; Truong Dinh, N.G. Identification of the work of plastic deformation and the friction shear stress in wire drawing. Wear 2012, 286–287, 27–34. [Google Scholar] [CrossRef]
- Martinez, G.A.S.; Qian, W.L.; Kabayama, L.K.; Prisco, U. Effect of Process Parameters in Copper-Wire Drawing. Metals 2020, 10, 105. [Google Scholar] [CrossRef] [Green Version]
- Vega, G.; Haddi, A.; Imad, A. Investigation of process parameters effect on the copper-wire drawing. Mater. Des. 2009, 30, 3308–3312. [Google Scholar] [CrossRef]
- Bitkov, V. Nonuniformity of deformation in drawing corrosionresistant steel and alloy wire. Steel Transl. 2010, 40, 169–173. [Google Scholar] [CrossRef]
- Huang, X.; Wang, J.; Zhao, S.; Yao, Z.; Liu, C. High-resolution multiscale modeling of mechanical behavior of cold-drawn pearlitic steels. J. Mater. 2021, 15, 5920–5935. [Google Scholar] [CrossRef]
- Liu, X.Y.; Zhang, S.H. The design of a drawing die based on the logistic function for the energy analysis of drawing force. Appl. Math. Model. 2022, 109, 833–847. [Google Scholar] [CrossRef]
- Dixit, U.S.; Dixit, P.M. An analysis of the steady-state wire drawing of strain hardening materials. J. Mater. Process Technol. 1995, 47, 201–229. [Google Scholar] [CrossRef]
- Cetlin, P.R.; Correa, E.C.S.; Aguilar, M.T.P. The effect of strain path on the work hardening of austenitic and ferritic stainless steels in axi-symmetric drawing. Metall. Mater. Trans. A 2003, 34, 589–601. [Google Scholar] [CrossRef]
- Haddi, A.; Imad, A.; Vega, G. Analysis of temperature and speed effects on the drawing stress for improving the wire drawing process. Mater. Des. 2011, 32, 4310–4315. [Google Scholar] [CrossRef]
- Tintelecan, M.; Sas-Boca, I.M.; Ilutiu-Varvara, D.A. The influence of the dies geometry on the drawing force for steel wires. Procedia Eng. 2017, 181, 193–199. [Google Scholar] [CrossRef]
- Shield, R.T. Plastic flow in a converging conical channel. J. Mech. Phys. Solids 1955, 3, 246–258. [Google Scholar] [CrossRef]
- Bonitskaya, O.V.; Krasavin, R.V.; Markin, A.A. The steady axisymmetric flow of ideally plastic materials in a conical channel. J. Appl. Math. Mech. 2010, 74, 494–500. [Google Scholar] [CrossRef]
- Durban, D. Axially symmetric radial flow of rigid/linear-hardening materials. J. Appl. Mech. 1979, 46, 322–328. [Google Scholar] [CrossRef]
- Durban, D. Radial flow simulation of drawing and extrusion of rigid/hardening materials. Int. J. Mech. Sci. 1983, 25, 27–39. [Google Scholar] [CrossRef]
- Avitzur, B. Analysis of wire drawing and extrusion through conical dies of small cone angle. J. Eng. Ind. 1963, 85, 89–95. [Google Scholar] [CrossRef]
- Lambert, E.R.; Kobayashi, S. A theory on the mechanics of axisymmetric extrusion through conical dies. J. Mech. Eng. Sci. 1968, 10, 367–380. [Google Scholar] [CrossRef]
- Tirosh, J. On the dead-zone formation in plastic axially-symmetric converging flow. J. Mech. Phys. Solids 1971, 19, 39–47. [Google Scholar] [CrossRef]
- Alexandrov, S.; Mishuris, G.; Mishuris, W.; Sliwa, R.E. On the dead zone formation and limit analysis in axially symmetric extrusion. Int. J. Mech. Sci. 2001, 43, 367–379. [Google Scholar] [CrossRef]
- Alexandrov, S.; Richmond, O. Singular plastic flow fields near surfaces of maximum friction stress. Int. J. Non-Linear Mech. 2001, 36, 1–11. [Google Scholar] [CrossRef]
- Gordon, W.A.; Van Tyne, C.J.; Sriram, S. Extrusion through spherical dies—An upper bound analysis. J. Manuf. Sci. Eng. 2002, 124, 92–97. [Google Scholar] [CrossRef]
- Chang, D.-F.; Wang, J. Optimized upper bound analysis of axisymmetric extrusion using spherical velocity field. J. Manuf. Sci. Eng. 2006, 128, 4–10. [Google Scholar] [CrossRef]
- Zhang, S.H.; Chen, X.D.; Zhou, J.; Zhao, D.W. Upper bound analysis of wire drawing through a twin parabolic die. Meccanica 2016, 51, 2099–2110. [Google Scholar] [CrossRef]
- Gur’yanov, G.N. Effect of the deformation parameters on the forces in the tool during wire-drawing. Metallurgist 2008, 52, 197–201. [Google Scholar] [CrossRef]
- Gur’yanov, G.N. Evaluating the maximum draft and safety factor in wire-drawing. Metallurgist 2008, 52, 582–587. [Google Scholar] [CrossRef]
- Gur’yanov, G.N.; Zhelezkov, O.S.; Platov, S.I.; Terent’ev, D.V. Influence of the drawing angle on wire quality. Steel Transl. 2015, 45, 18–24. [Google Scholar] [CrossRef]
- Kazeminezhad, M. Combination of the upper bound and potts models for simulation of microstructure in wire drawing and annealing processes. J. Mater. Eng. Perform. 2009, 18, 26–31. [Google Scholar] [CrossRef]
- Panteghini, A.; Genna, F. An engineering analytical approach to the design of cold wire drawing processes for strain-hardening materials. Int. J. Mater. Form. 2010, 3, 279–289. [Google Scholar] [CrossRef]
- Hill, R. The Mathematical Theory of Plasticity; Oxford University Press: New York, NY, USA, 1950. [Google Scholar]
- Luis, C.J.; Leon, J.; Luri, R. Comparison between finite element method and analytical methods for studying wire drawing processes. J. Mater. Process. Technol. 2005, 164–165, 1218–1225. [Google Scholar] [CrossRef]
- Hill, R. New horizons in the mechanics of solids. J. Mech. Phys. Solids 1956, 5, 66–74. [Google Scholar] [CrossRef]
- Avitzur, B. Analysis of central bursting defects in extrusion and wire Drawing. J. Eng. Ind. 1968, 90, 79–90. [Google Scholar] [CrossRef]
- Parghazeh, A.; Haghighat, H. Prediction of central bursting defects in rod extrusion process with upper bound analysis method. Trans. Nonferr. Metal. Soc. 2016, 26, 2892–2899. [Google Scholar] [CrossRef]
- Richmond, O.; Alexandrov, S. Extension of Bernoulli’s theorem on steady flows of inviscid fluids to steady flows of plastic solids. C. R. L’académie Sci.-Ser. IIB–Mech. 2000, 328, 835–840. [Google Scholar] [CrossRef]
- Atkins, A.G. Fracture in forming. J. Mater. Process. Technol. 1996, 56, 609–618. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alexandrov, S.; Hwang, Y.-M.; Tsui, H.S.R. Determining the Drawing Force in a Wire Drawing Process Considering an Arbitrary Hardening Law. Processes 2022, 10, 1336. https://doi.org/10.3390/pr10071336
Alexandrov S, Hwang Y-M, Tsui HSR. Determining the Drawing Force in a Wire Drawing Process Considering an Arbitrary Hardening Law. Processes. 2022; 10(7):1336. https://doi.org/10.3390/pr10071336
Chicago/Turabian StyleAlexandrov, Sergei, Yeong-Maw Hwang, and Hiu Shan Rachel Tsui. 2022. "Determining the Drawing Force in a Wire Drawing Process Considering an Arbitrary Hardening Law" Processes 10, no. 7: 1336. https://doi.org/10.3390/pr10071336