
Cable Fault Location in VSC-HVDC System Based on Improved Local Mean Decomposition


Abstract
:1. Introduction
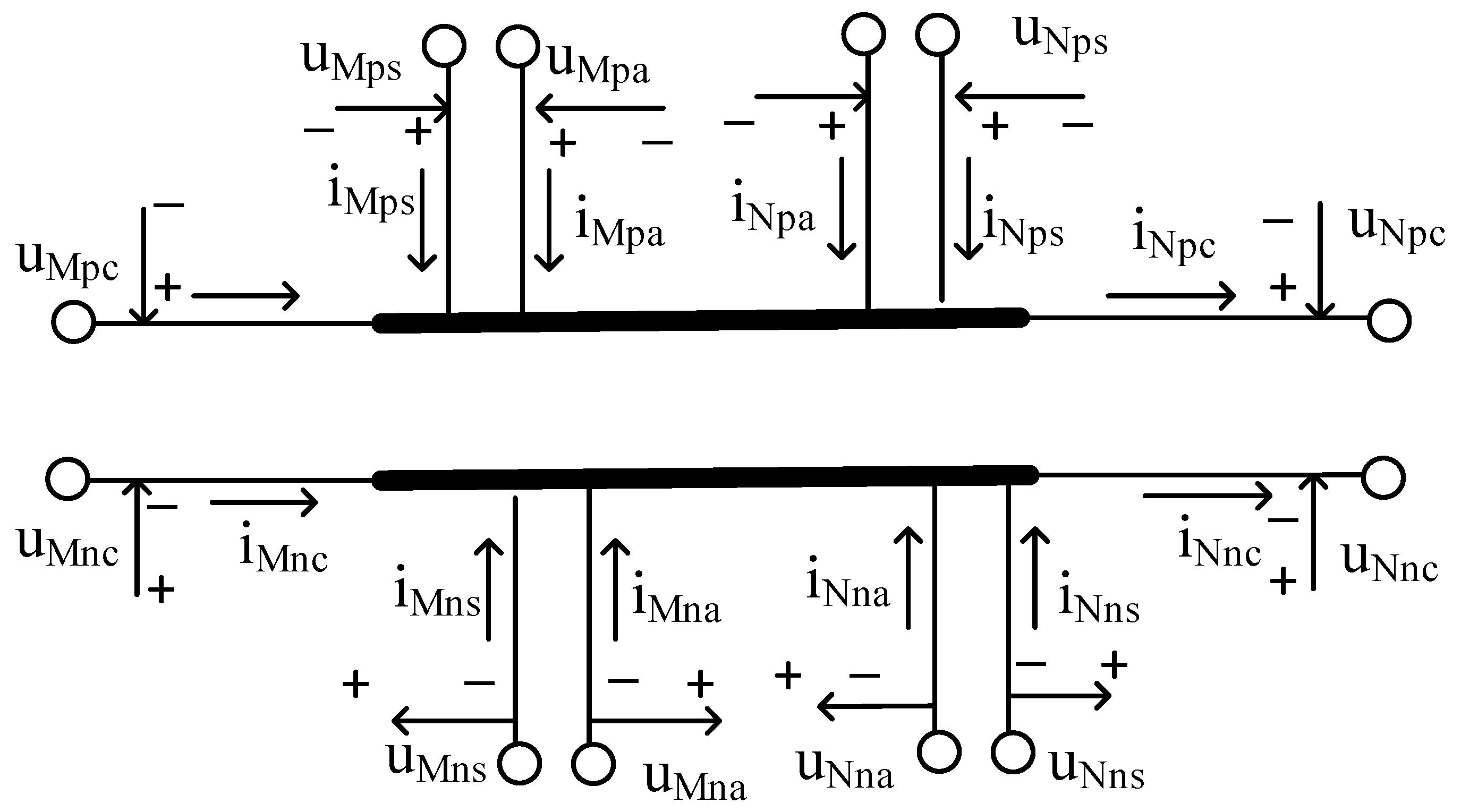
2. DC Cable Phase-Mode Conversion
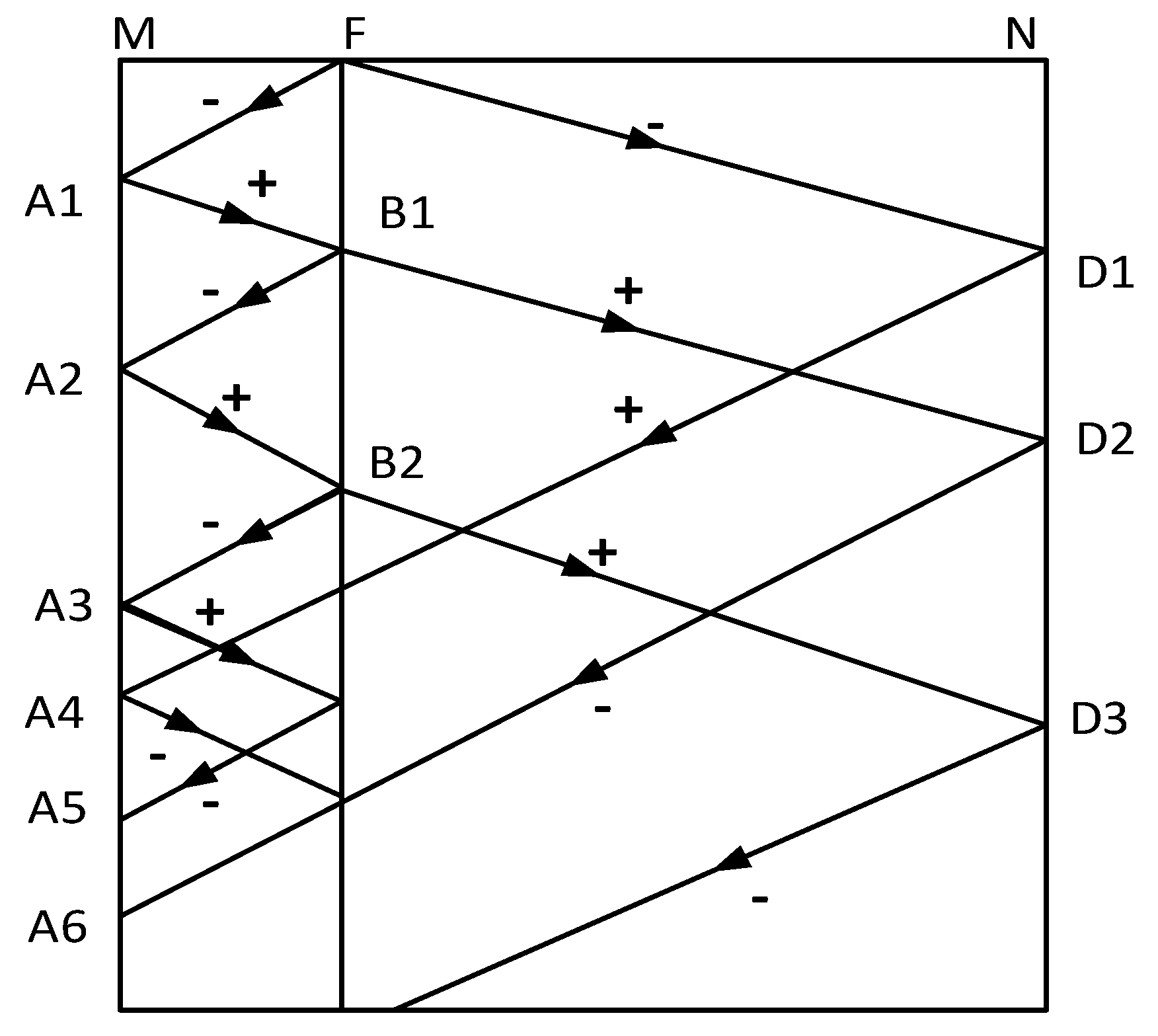
3. Traveling Wave Transmission Characteristics
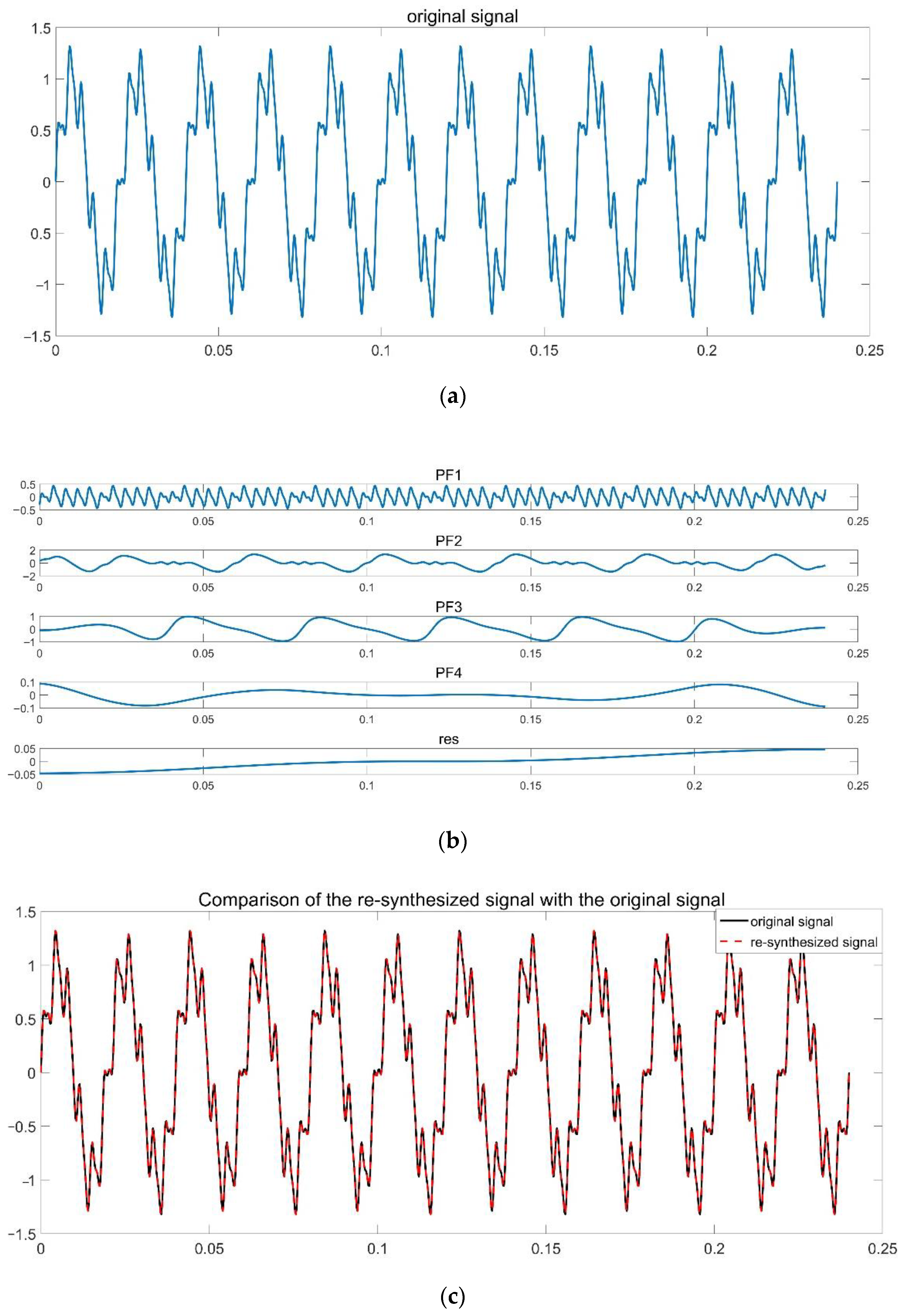
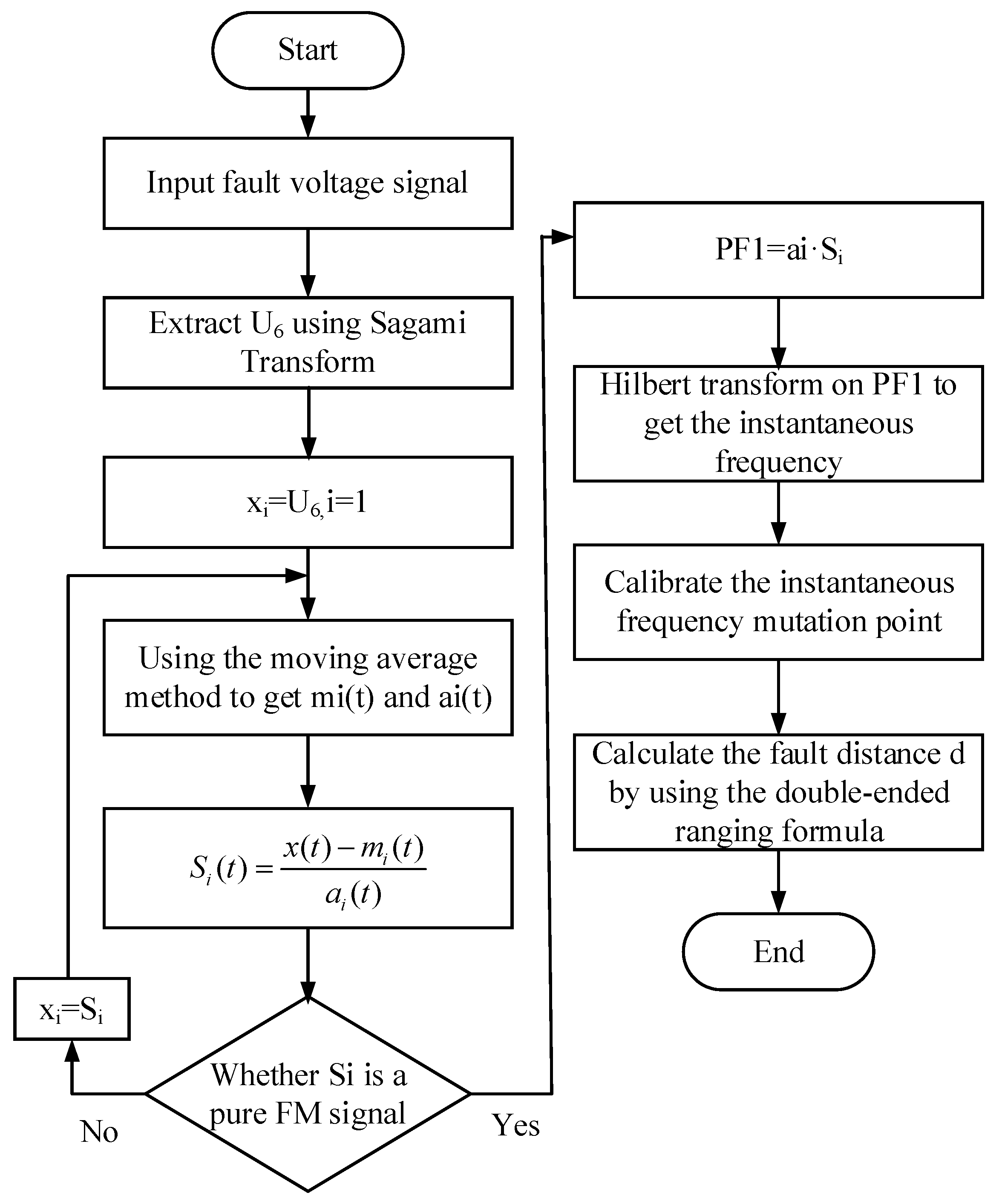
4. The Principle of ILMD
4.1. The Principle of LMD
4.2. Hilbert Transform
4.3. Comparison of Mathematical Methods

5. Simulation Results
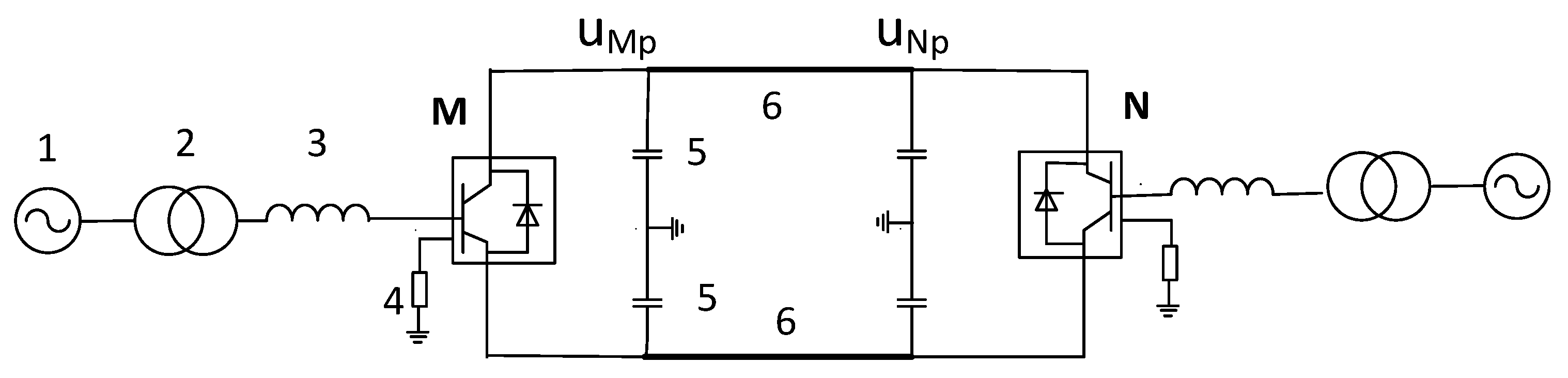
5.1. Power Transmission Model Construction
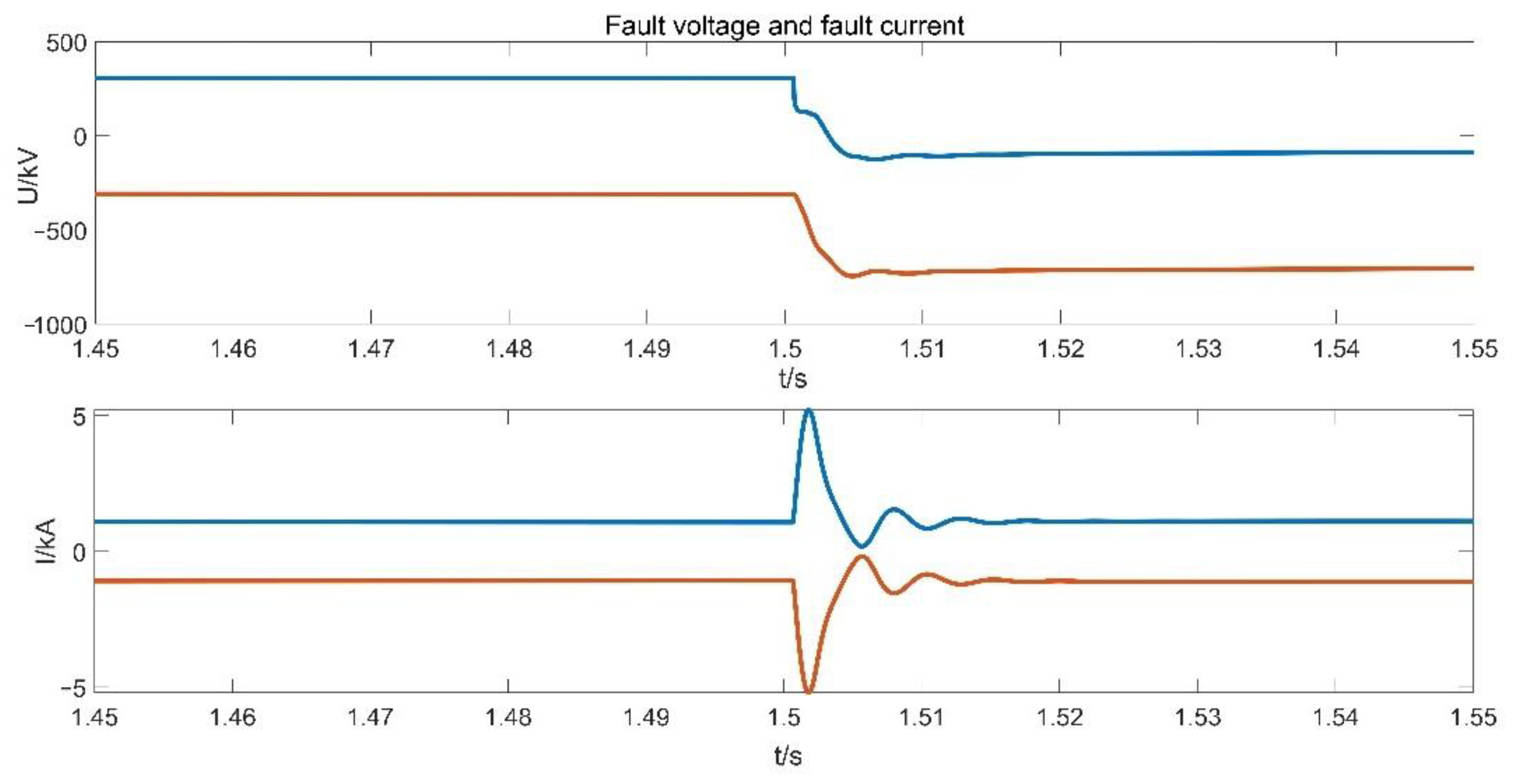
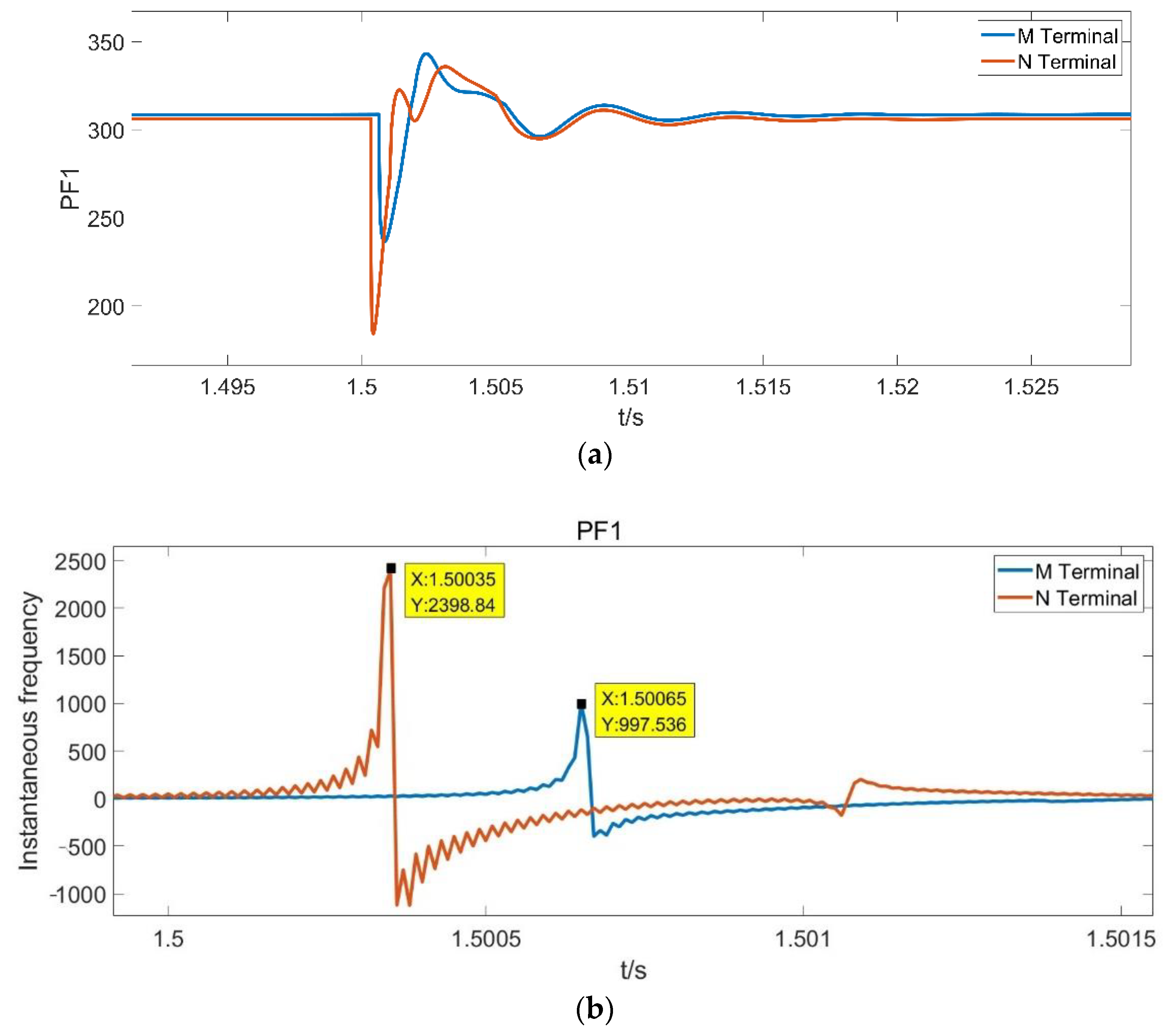
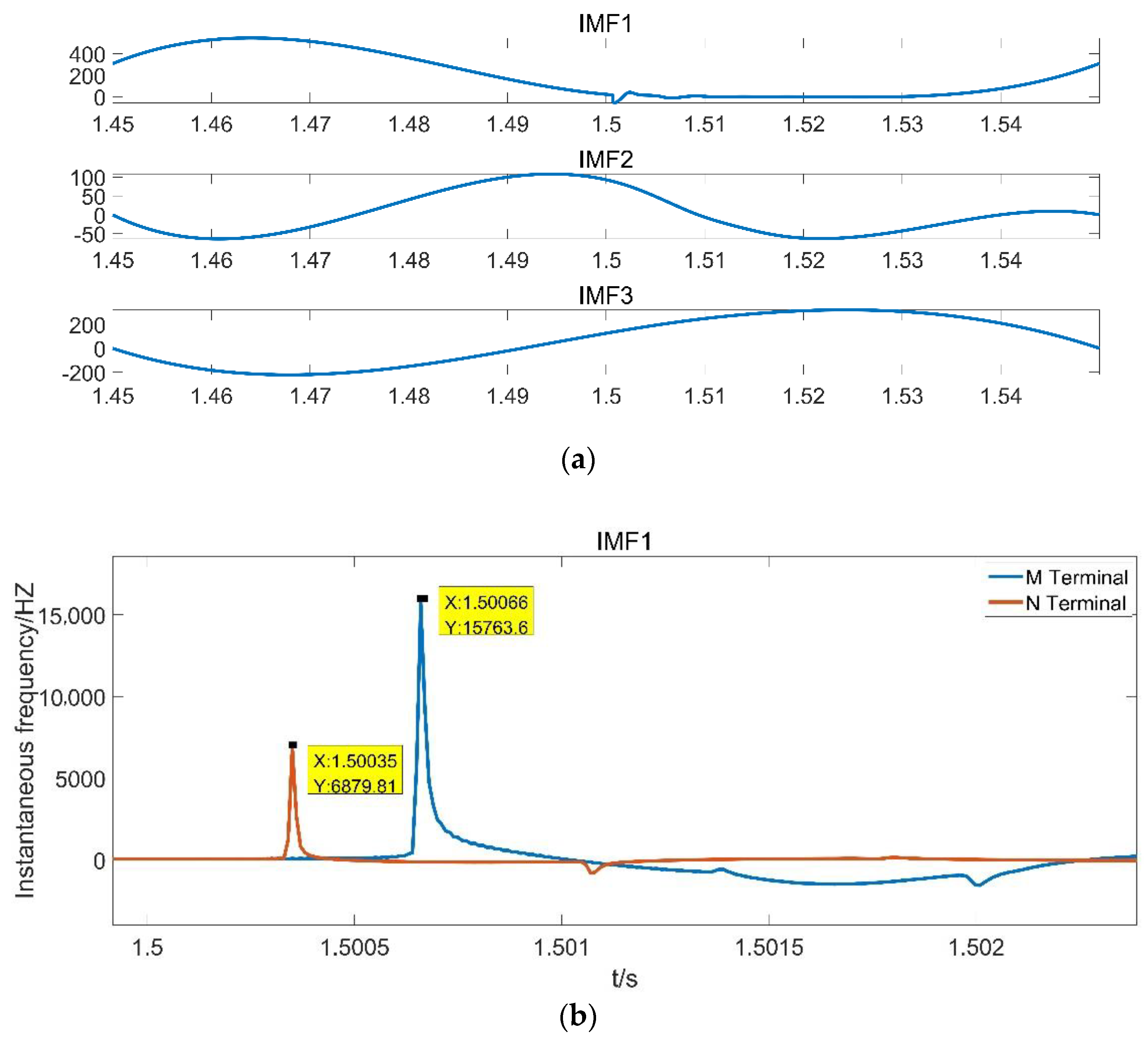
5.2. ILMD Method Validation
5.3. Noise Immunity Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Song, Y.; Shi, W.; Huang, C.; Zhao, Y.; Yang, X. Research on the rationalization of field commissioning for multi-terminal HVDC projects-taking lugaozhao HVDC project for example. In Proceedings of the 2021 Annual Meeting of CSEE Study Committee of HVDC and Power Electronics (HVDC 2021), Beijing, China, 28–30 December 2021. [Google Scholar]
- Gomis-Bellmunt, O.; Sau-Bassols, J.; Prieto-Araujo, E.; Cheah-Mane, M. Flexible converters for meshed HVDC grids: From flexible AC transmission systems (FACTS) to flexible DC grids. IEEE Trans. Power Deliv. 2019, 35, 2–15. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, H.J.; Qian, J.F. A two-terminal fault location algorithm using asynchronous sampling based on genetic algorithm. In Proceedings of the 2011 International Conference on Advanced Power System Automation and Protection, Beijing, China, 16–20 October 2011; IEEE: Beijing, China, 2011; Volume 2, pp. 1513–1516. [Google Scholar]
- Gao, S.; Suonan, J.; Song, G.; Zhang, J.; Jiao, Z. Fault location method of DC transmission line based on distributed parameter model. Chin. J. Electr. Eng. 2010, 30, 75–80. [Google Scholar]
- Kang, L.; Tang, K.; Luo, J.; Xu, R.; Huang, J. Single-pole grounding double-ended fault location of DC transmission lines. Power Grid Technol. 2014, 38, 2268–2273. [Google Scholar] [CrossRef]
- Lu, D.; Liu, Y.; Xie, J.; Wang, B.; Liao, Q. Multi-Layer Model Enabled Fault Location for Underground Cables in MMC-HVDC Grids Considering Distributed and Frequency Dependent Line Parameters. IEEE Trans. Power Deliv. 2021, 37, 3082–3096. [Google Scholar] [CrossRef]
- Lin, S.; He, Z.; Li, X.; Qian, Q. A single-ended traveling wave natural frequency ranging method considering time domain characteristics. Power Grid Technol. 2012, 36, 243–248. [Google Scholar]
- Liao, K.; He, Z.; Li, X. Fault Location of HVDC Transmission Lines Based on Natural Frequency of Traveling Waves. Autom. Electr. Power Syst. 2013, 37, 104–109. [Google Scholar]
- He, Z.Y.; Liao, K.; Li, X.P.; Lin, S.; Yang, J.W.; Mai, R.K. Natural frequency-based line fault location in HVDC lines. IEEE Trans. Power Deliv. 2013, 29, 851–859. [Google Scholar] [CrossRef]
- He, J.; Li, B.; Sun, Q.; Li, Y.; Lyu, H.; Wang, W.; Xie, Z. The improved fault location method based on natural frequency in MMC-HVDC grid by combining FFT and MUSIC algorithms. Int. J. Electr. Power Energy Syst. 2022, 137, 107816. [Google Scholar] [CrossRef]
- Song, G.; Chu, X.; Cai, X.; Gao, S.; Ran, M. A fault-location method for VSC-HVDC transmission lines based on natural frequency of current. Int. J. Electr. Power Energy Syst. 2014, 63, 347–352. [Google Scholar] [CrossRef]
- Cao, W.; Chen, X.; Li, Z. Locating Natural Frequency Faults in HVDC Transmission Systems Based on the Rotation-Invariant Technology Signal Parameter Estimation Algorithm and the Total Least Squares Method. Math. Probl. Eng. 2022, 2022, 1467857. [Google Scholar] [CrossRef]
- Huang, Z. A new method for fault location of hybrid lines using natural frequencies of traveling waves. J. Electr. Power Syst. Autom. 2015, 27, 73–79. [Google Scholar]
- Liang, J.; Jing, T.; Niu, H.; Wang, J. Two-terminal fault location method of distribution network based on adaptive convolution neural network. IEEE Access 2020, 8, 54035–54043. [Google Scholar] [CrossRef]
- Ye, X.; Lan, S.; Xiao, S.J.; Yuan, Y. Single Pole-to-Ground Fault Location Method for MMC-HVDC System Using Wavelet Decomposition and DBN. IEEJ Trans. Electr. Electron. Eng. 2021, 16, 238–247. [Google Scholar] [CrossRef]
- Cui, H.; Tu, N. HVDC transmission line fault localization base on RBF neural network with wavelet packet decomposition. In Proceedings of the 2015 12th International Conference on Service Systems and Service Management (ICSSSM), Guangzhou, China, 22–24 June 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, H. Fault location for MMC–MTDC transmission lines based on least squares-support vector regression. J. Eng. 2019, 2019, 2125–2130. [Google Scholar] [CrossRef]
- Lan, S.; Chen, M.J.; Chen, D.Y. A novel HVDC double-terminal non-synchronous fault location method based on convolutional neural network. IEEE Trans. Power Deliv. 2019, 34, 848–857. [Google Scholar] [CrossRef]
- Zhang, C.; Song, G.; Wang, T.; Yang, L. Single-ended traveling wave fault location method in DC transmission line based on wave front information. IEEE Trans. Power Deliv. 2019, 34, 2028–2038. [Google Scholar] [CrossRef]
- Zhang, S.; Zou, G.; Huang, Q.; Gao, H. A traveling-wave-based fault location scheme for MMC-based multi-terminal DC grids. Energies 2018, 11, 401. [Google Scholar] [CrossRef] [Green Version]
- Xi, C.; Chen, Q.; Wang, L. A single-terminal traveling wave fault location method for VSC-HVDC transmission lines based on S-transform. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; IEEE: Xi’an, China, 2016; pp. 1008–1012. [Google Scholar]
- Zhang, M.; Guo, R.; Sun, H. Fault Location of MMC-HVDC DC Transmission Line Based on Improved VMD and S Transform. In Proceedings of the 2020 4th International Conference on HVDC (HVDC), Xi’an, China, 6–9 November 2020; IEEE: Xi’an, China, 2020; pp. 792–796. [Google Scholar]
- Li, Y.; Zhao, Y.; Kong, J.; Zhou, J.; Zheng, T. A Travelling Wave based Single-Ended Fault Location Using Multi-resolution Morphological Gradient. In Proceedings of the 2021 6th International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, 17–20 September 2021; pp. 221–226. [Google Scholar] [CrossRef]
- Wang, D.; Hou, M. Travelling wave fault location algorithm for LCC-MMC-MTDC hybrid transmission system based on Hilbert-Huang transform. Int. J. Electr. Power Energy Syst. 2020, 121, 106125. [Google Scholar] [CrossRef]
- Yu, J.; Lv, J. Weak fault feature extraction of rolling bearings using local mean decomposition-based multilayer hybrid denoising. IEEE Trans. Instrum. Meas. 2017, 66, 3148–3159. [Google Scholar] [CrossRef]
- Zhao, P.; Chen, Q.; Sun, K.; Xi, C. A current frequency component-based fault-location method for voltage-source converter-based high-voltage direct current (VSC-HVDC) cables using the S transform. Energies 2017, 10, 1115. [Google Scholar] [CrossRef] [Green Version]
- Xi, C. Research on Fault Location of Flexible HVDC Transmission Lines; Shandong University: Shandong, China, 2017. [Google Scholar]
- Song, H.; Huang, C.; Liu, H.; Chen, T.; Li, J.; Luo, Y. A New Method for Detection of Power Quality Disturbance Based on Improved LMD. Chin. J. Electr. Eng. 2014, 34, 1700–1708. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Distance (km) | Wavelet Transform (km) | Error (%) | HHT (km) | Error (%) | ILMD (km) | Error (%) |
|---|---|---|---|---|---|---|
| 0 | 1.0536 | 0.5268 | 0.9886 | 0.4943 | 0.7742 | 0.3871 |
| 10 | 8.0183 | 0.9909 | Error | - | 9.0119 | 0.4940 |
| 50 | 49.5584 | 0.2208 | 49.3350 | 0.3325 | 49.9350 | 0.0325 |
| 85 | 84.1760 | 0.4120 | Error | - | 85.1642 | 0.0821 |
| 100 | 100.0125 | 0.0063 | 100 | 0.0063 | 100 | 0 |
| 130 | 130.6605 | 0.3303 | 130.6590 | 0.3295 | 129.6699 | 0.1650 |
| 150 | 150.5415 | 0.2708 | 150.6392 | 0.3196 | 150.4390 | 0.2195 |
| 180 | 182.0910 | 1.0455 | 182.0870 | 1.0435 | 180.7391 | 0.3695 |
| 200 | 198.6750 | 0.6625 | 201.3762 | 0.6881 | 198.9653 | 0.5173 |
| Fault Distance (km) | Transition Impedance (Ω) | ILMD (km) | Error (%) |
|---|---|---|---|
| 10 | 0 | 9.0119 | 0.4940 |
| 100 | 8.0229 | 0.9885 | |
| 1000 | 8.0229 | 0.9885 | |
| 2000 | 8.0229 | 0.9885 | |
| 50 | 0 | 49.9350 | 0.0325 |
| 100 | 49.9350 | 0.0325 | |
| 1000 | 49.9350 | 0.0325 | |
| 2000 | 49.6609 | 0.1695 | |
| 85 | 0 | 85.1642 | 0.0821 |
| 100 | 85.1658 | 0.0829 | |
| 1000 | 85.1658 | 0.0829 | |
| 2000 | 85.1650 | 0.0825 | |
| 130 | 0 | 129.6699 | 0.1650 |
| 100 | 130.6590 | 0.3295 | |
| 1000 | 130.6590 | 0.3295 | |
| 2000 | 130.6590 | 0.3295 | |
| 180 | 0 | 180.7391 | 0.3695 |
| 100 | 180.7391 | 0.3695 | |
| 1000 | 180.7391 | 0.3695 | |
| 2000 | 181.0980 | 181.0980 |
| Fault Distance (km) | SNR (dB) | Ranging Results (km) | Error (%) |
|---|---|---|---|
| 10 | 40/25/15 | 9.0119 | 0.4940 |
| 50 | 40/25/15 | 49.9350 | 0.0325 |
| 85 | 40/25/15 | 85.1642 | 0.0821 |
| 100 | 40/25/15 | 100 | 0 |
| 130 | 40/25/15 | 129.6699 | 0.1650 |
| 180 | 40/25/15 | 180.7391 | 0.3695 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, W.; Li, Z.; Xu, M.; Niu, R. Cable Fault Location in VSC-HVDC System Based on Improved Local Mean Decomposition. Processes 2022, 10, 1655. https://doi.org/10.3390/pr10081655
Cao W, Li Z, Xu M, Niu R. Cable Fault Location in VSC-HVDC System Based on Improved Local Mean Decomposition. Processes. 2022; 10(8):1655. https://doi.org/10.3390/pr10081655
Chicago/Turabian StyleCao, Wensi, Zhaohui Li, Mingming Xu, and Rongze Niu. 2022. "Cable Fault Location in VSC-HVDC System Based on Improved Local Mean Decomposition" Processes 10, no. 8: 1655. https://doi.org/10.3390/pr10081655
APA StyleCao, W., Li, Z., Xu, M., & Niu, R. (2022). Cable Fault Location in VSC-HVDC System Based on Improved Local Mean Decomposition. Processes, 10(8), 1655. https://doi.org/10.3390/pr10081655