
Integrating Dynamic Economic Optimization and Nonlinear Closed-Loop GPC: Application to a WWTP




Abstract
:1. Introduction
2. Notation
3. Problem Statement
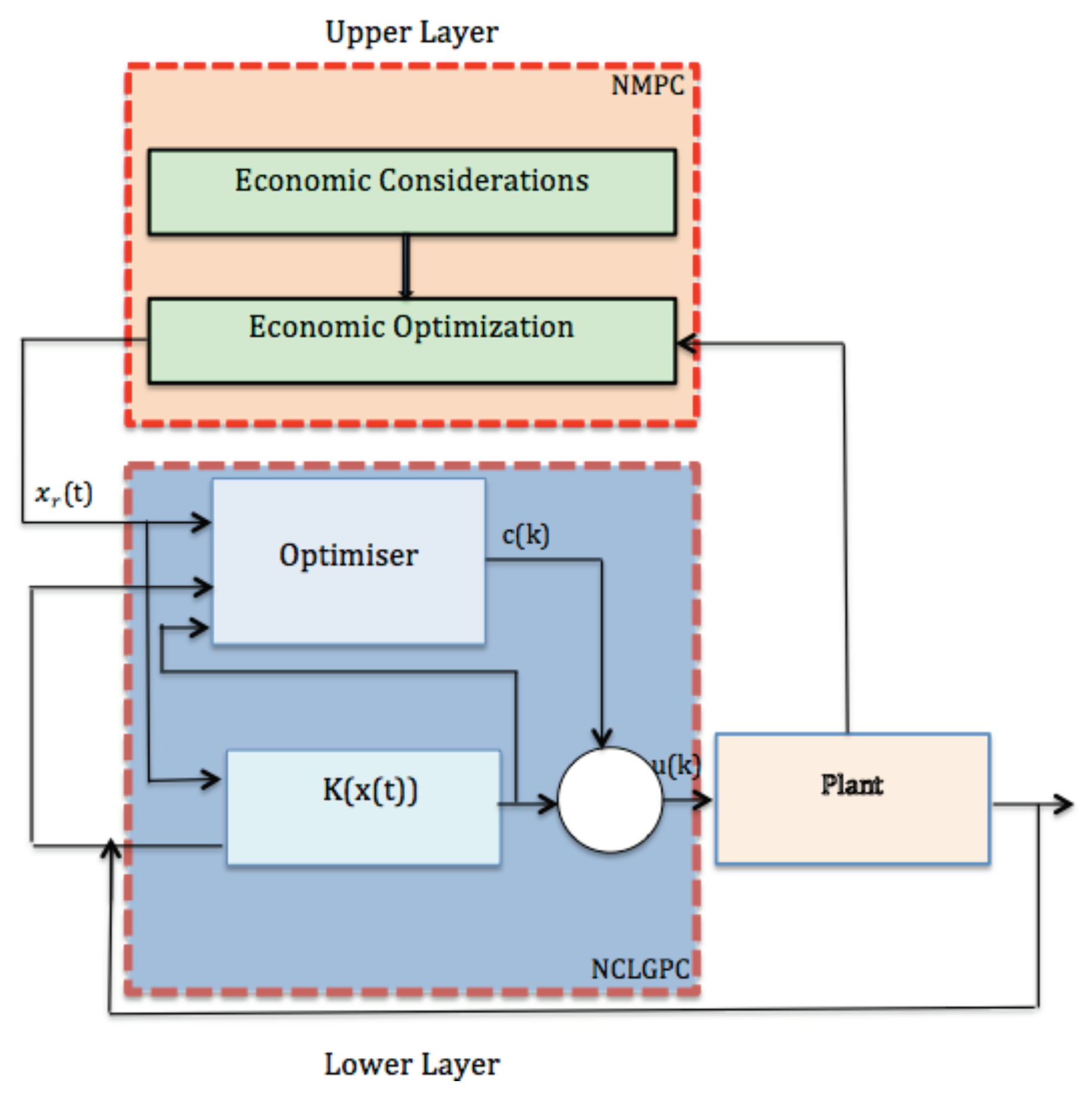
4. Controller Design
4.1. Upper Layer Problem Formulation
4.2. Lower Layer Problem Formulation
- At time the upper layer economic NMPC with a prediction horizon receives the system state from the process.
- The controller of Equation (6) computes the economically optimal state trajectory .
- The terminal control law is computed.
- The solution of the optimization of Equation (9) denoted by is calculated to track the economic state trajectory computed in step 2.
- Go to step 1,
5. Stability
5.1. Definitions and Assumptions
- a -function if it is continuous, strictly increasing and .
- a -function if it is a -function and and as .
- for each fixed , the function is a -function, and
- for each fixed r, the mapping is decreasing with respect to t and as .
5.2. Stability Analysis
6. Application to WWTP
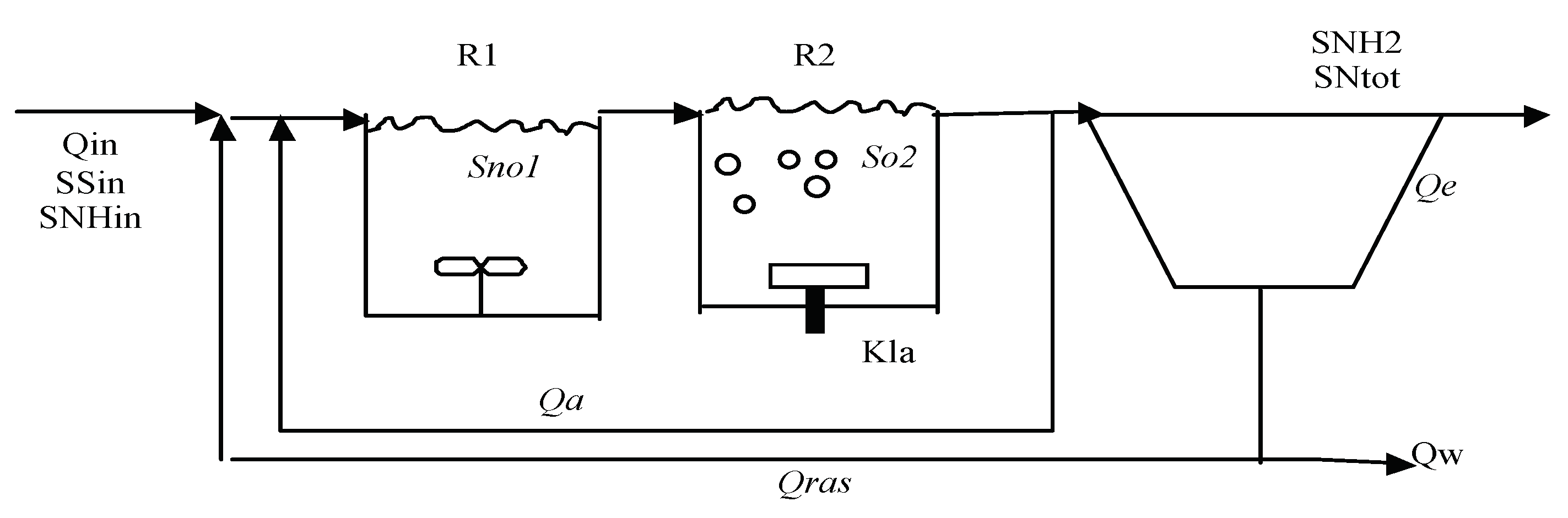
6.1. Process Model
- Anoxic reactor:
- Aerobic reactor:
6.2. Operating Conditions
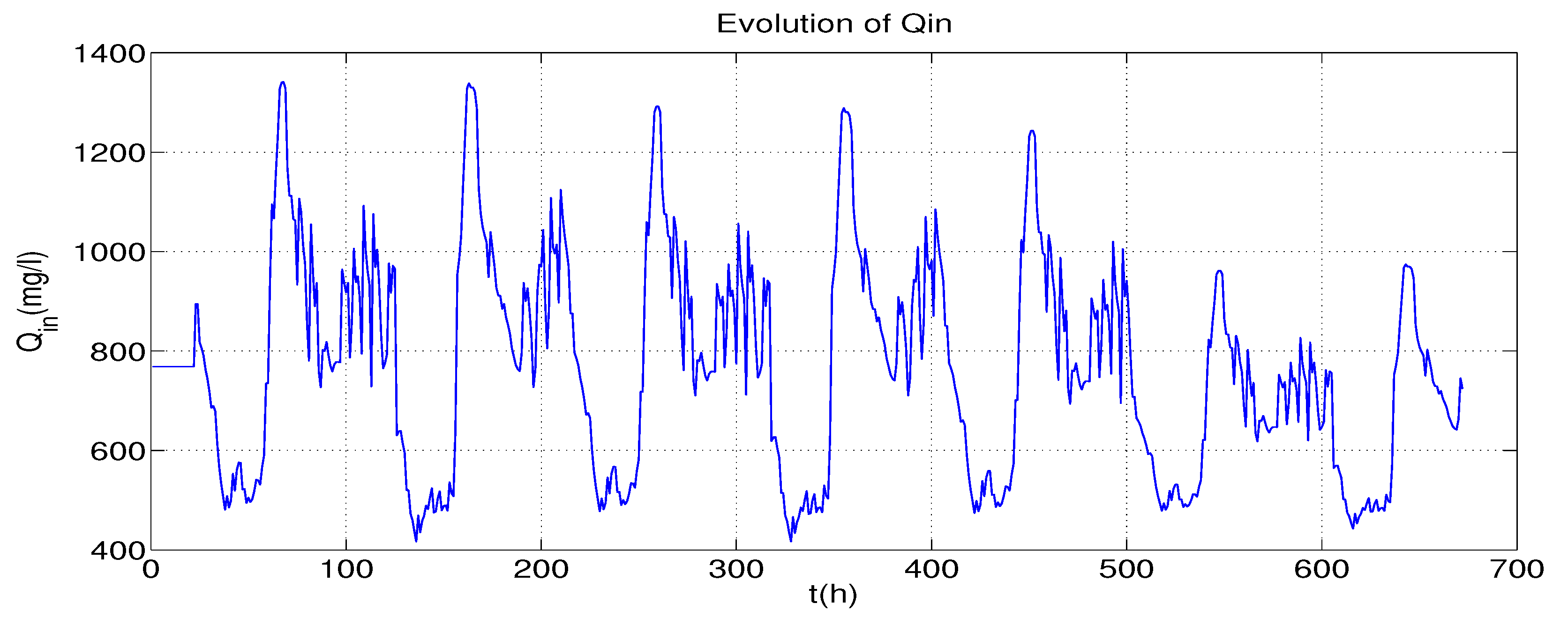
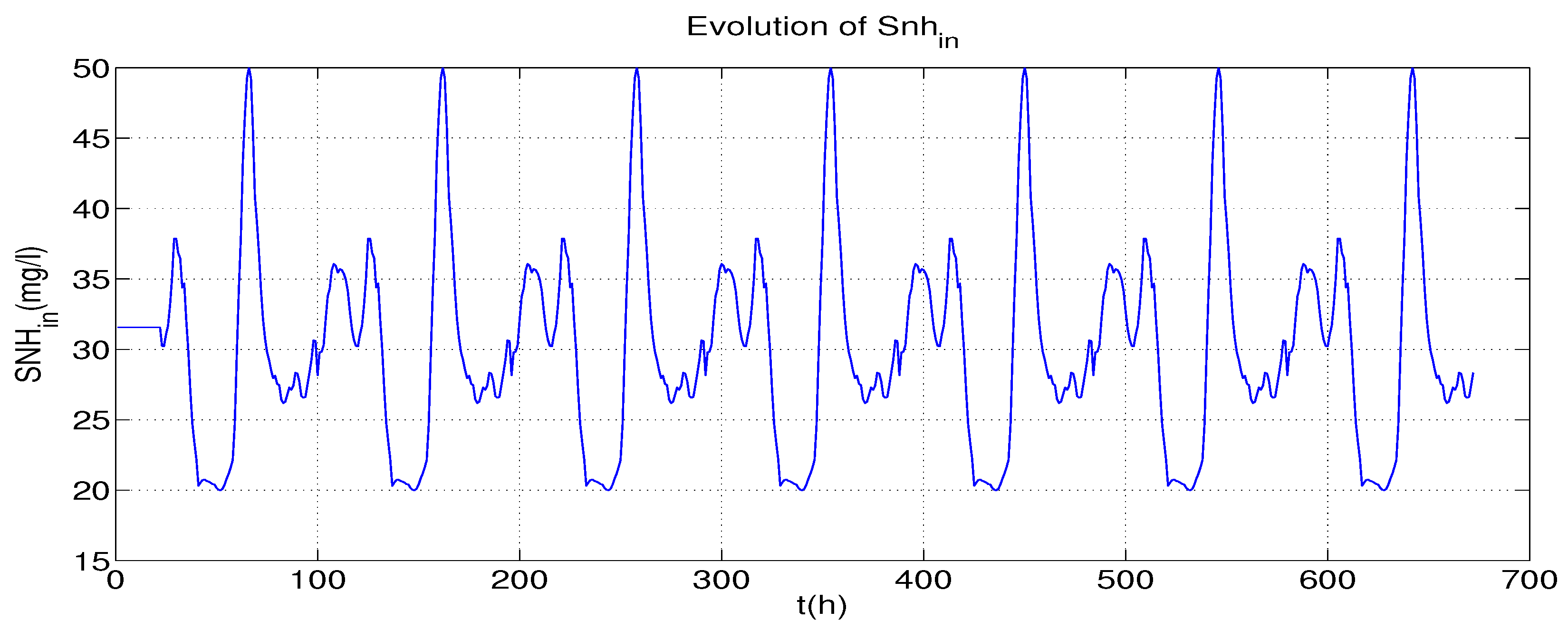
- Influent load and disturbances: In order to test the performance of the control strategy in different situations, the BSM1 provides standardized influent data considering different weather situations. In this work, data for 336 h, corresponding to 2 weeks starting at time 168 h, are considered, with a sampling period of 0.25 h (= 15 min). Figure 3, Figure 4 and Figure 5 present the profiles for stormy weather.
- Bounds: The limits on the effluent–ammonium concentration, total nitrogen concentration, suspended solid concentration, biological oxygen demand over a 5-day period and are given in Table 4.
6.3. Performance Indices
6.4. Control Problem Formulation
6.4.1. Two Layer
- (I).
- Lower layer control problem
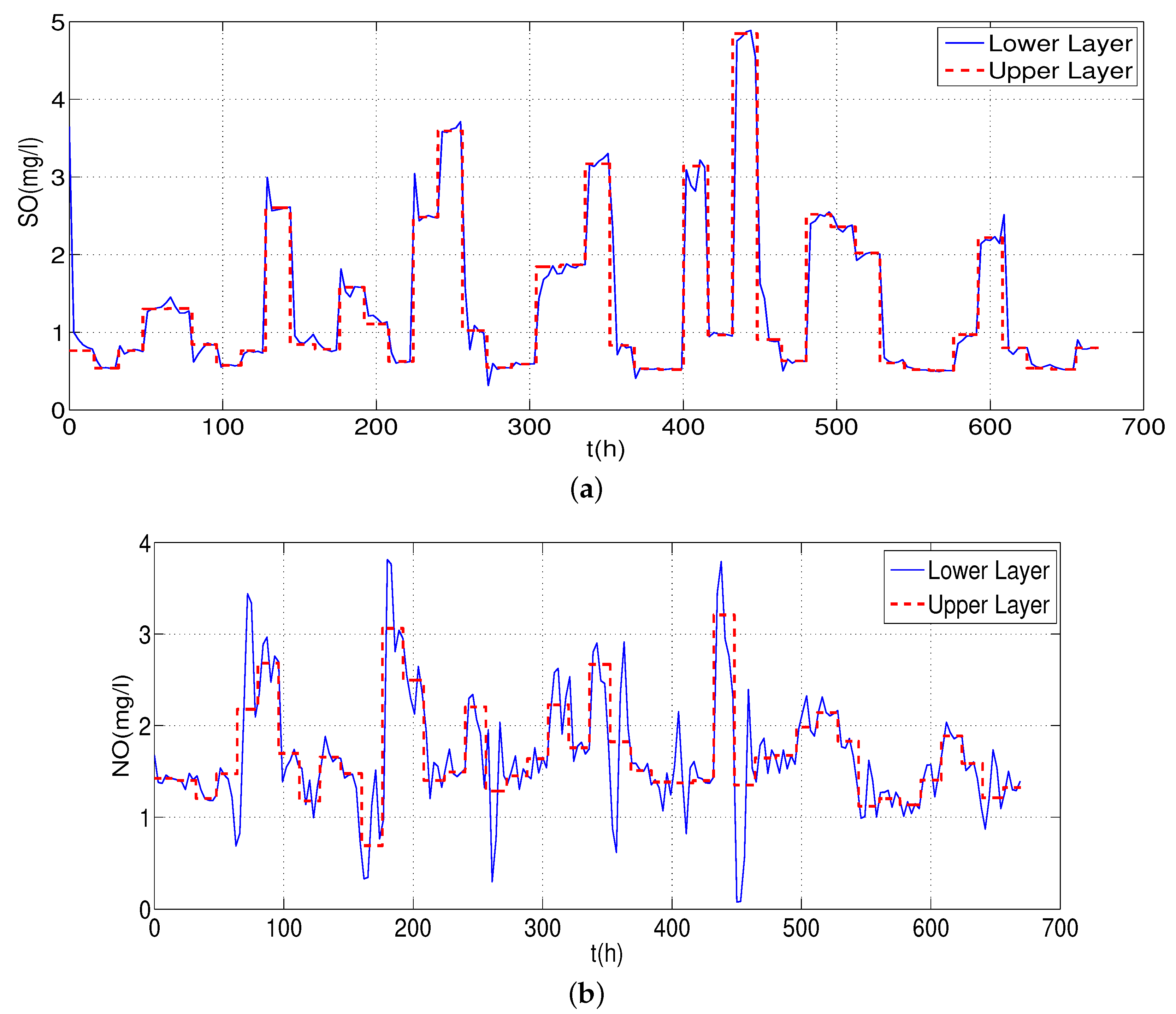
- The state vector: .
- The output variables: .
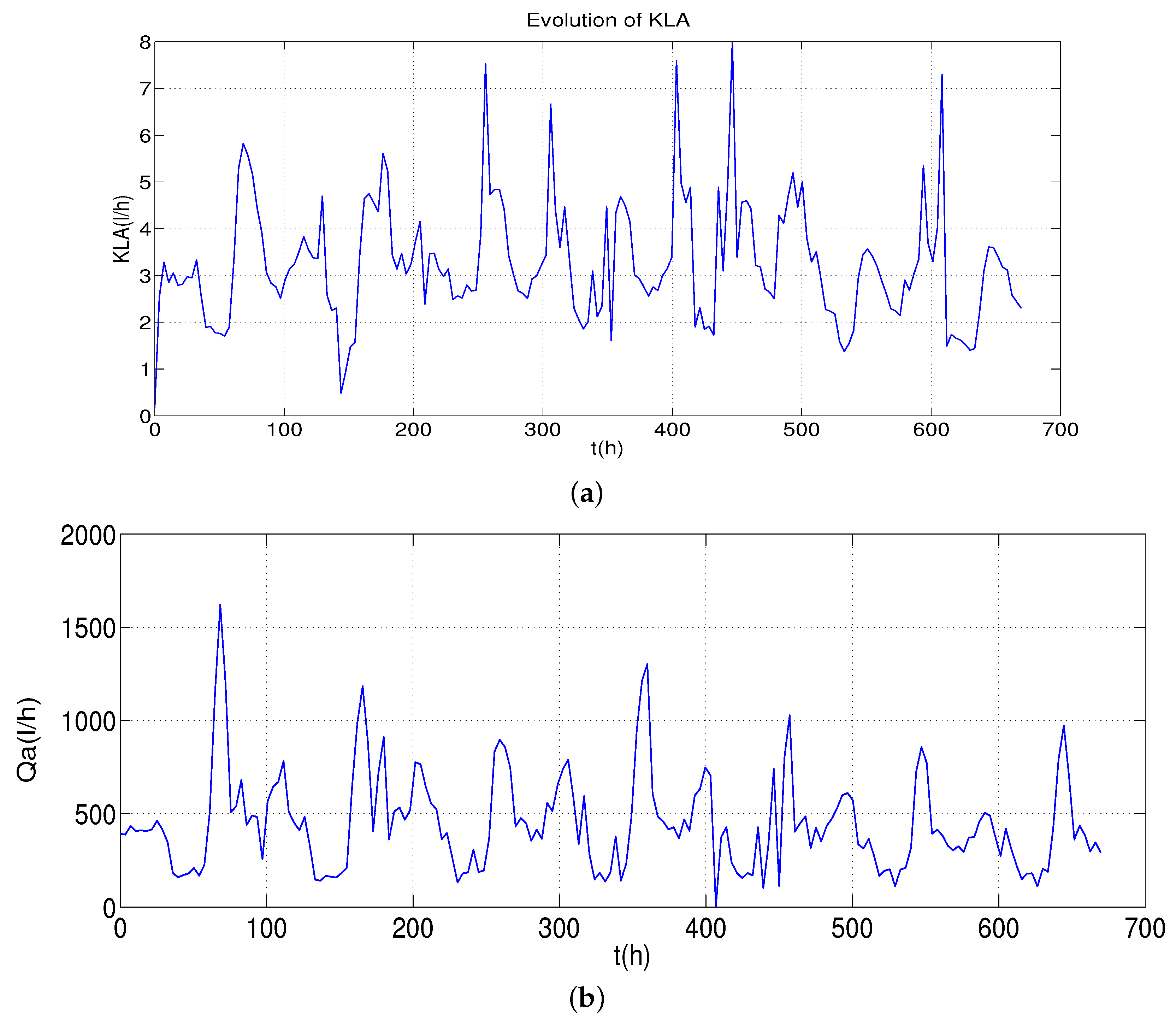
- The manipulated variables: .
- The measured disturbances: .
- (II).
- Upper layer control problem
6.4.2. One Layer
- The predicted control moves are centered around an unconstrained stabilizing control law, , over the whole prediction horizon, and some additive degrees of freedom, , are added over a finite horizon to handle constraints.
- In the objective function the nonlinear economic term is replaced by its gradient.
- The prediction model, a nonlinear phenomenological model of the plant, is written as a state dependent coefficient model, also called extended linearization.
7. Simulations Settings
8. Simulations Results
9. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| MPC | Model Predictive Control |
| NMPC | Model Predictive Control |
| GPC | Generalized Predictive Control |
| NCLGPC | Nonlinear Closed Loop Generalized Predictive Control |
| QP | Quadratic Programming |
| NLP | Nonlinear Programming |
| RTO | Real Time Optimization |
| D-RTO | Dynamic Real Time Optimization |
| CLMPC | Closed Loop Model Predictive Control |
| WWTP | Wastewater Treatment Plant |
| MIMO | Multi Input Multi Output |
| PE | Pumping Energy |
| AE | Aeration Energy |
| EQ | Effluent Quality |
| OCI | Overall Coast Index |
| BSM1 | Benchmark Simulation Model 1 |
| ASP | Activated Sludge Process |
Appendix A
Appendix B
References
- Edgar, T. Control and operations: When does controllability equal profitability? Comput. Chem. Eng. 2004, 29, 41–49. [Google Scholar] [CrossRef]
- Darby, M.L.; Nikolau, M.; Jones, J.; Nicholson, D. RTO: An overview and assessment of current practice. J. Process Control 2011, 21, 874–884. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Patel, N.R.; Risbeck, M.J.; Maravelias, C.T.; Wenzel, M.J.; Turney, R.D. Economic MPC and real-time decision making with application to large-scale HVAC energy systems. Comput. Chem. Eng. 2018, 114, 89–98. [Google Scholar] [CrossRef]
- Revollar, S.; Vega, P.; Vilanova, R.; Francisco, M. Optimal Control of Wastewater Treatment Plants Using Economic-Oriented Model Predictive Dynamic Strategies. Appl. Sci. 2017, 7, 813. [Google Scholar] [CrossRef]
- De Prada, C.; Sarabia, D.; Gutierrez, G.; Gomez, E.; Marmol, S.; Sola, M.; Pascual, C.; Gonzalez, R. Integration of RTO and MPC in the Hydrogen Network of a Petrol Refinery. Processes 2017, 5, 3. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Amrit, R. Optimizing Process Economic Performance Using Model Predictive Control. In Nonlinear Model Predictive Control; Magni, L., Raimondo, D.M., Allgöwer, F., Eds.; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2009; Volume 384. [Google Scholar]
- Ellis, M.; Christofides, P.D. Integrating dynamic economic optimization and model predictive control for optimal operation of nonlinear process systems. Control. Eng. Pract. 2014, 22, 242–251. [Google Scholar] [CrossRef]
- Kadam, J.V.; Schlegel, M.; Marquardt, W.; Tousain, R.L.; Van Hessem, D.H.; van den Berg, J.; Bosgra, O.H. A two-level strategy of integrated dynamic optimization and control of industrial processes–a case study. In Computer Aided Chemical Engineering; Elsevier: Amsterdam, The Netherlands, 2002; Volume 10, pp. 511–516. [Google Scholar]
- El Bahja, H.; Vega, P.; Revollar, S.; Francisco, M. One Layer Nonlinear Economic Closed-Loop Generalized Predictive Control for a Wastewater Treatment Plant. Appl. Sci. 2018, 8, 657. [Google Scholar] [CrossRef]
- Zanin, A.C.; de Gouvéa, M.T.; Odloak, D. Integrating real-time optimization into the model predictive controller of the fcc system. Control Eng. Pract. 2002, 10, 819–831. [Google Scholar] [CrossRef]
- Huang, R.; Harinath, E.; Biegler, L.T. Lyapunov stability of economically oriented NMPC for cyclic processes. J. Process. Control 2011, 21, 501–509. [Google Scholar] [CrossRef]
- Heidarinejad, M.; Liu, J.; Christofides, P.D. Economic model predictive control of nonlinear process systems using Lyapunov techniques. AIChE J. 2012, 58, 855–870. [Google Scholar] [CrossRef]
- Zambrano, D.; Camacho, E.F. Application of MPC with multiple objective for a solar refrigeration plant. In Proceedings of the International Conference on Control Applications, Glasgow, UK, 18–20 September 2002; Volume 2, pp. 1230–1235. [Google Scholar]
- Zavala, V.M. Real-Time Resolution of Conflicting Objectives in Building Energy Management: An Utopia-Ttracking Approach; Technical Report ANL/MCS-P2056-0312; Argonne National Laboratory: Lemont, IL, USA, 2012. [Google Scholar]
- Piotrowski, R.; Brdys, M.A.; Konarczak, K.; Duzinkiewicz, K.; Chotkowski, W. Hierarchical dissolved oxygen control for activated sludge processes. Control Eng. Pract. 2008, 16, 114–131. [Google Scholar] [CrossRef]
- Yamanaka, O.; Obara, T.; Yamamoto, K. Total cost minimization control scheme for biological wastewater treatment process and its evaluation based on the cost benchmark process. Water Sci. Technol. 2006, 53, 203–214. [Google Scholar] [CrossRef] [PubMed]
- Benot, B.; Lemoine, C.; Steyer, J.-P. Multiobjective genetic algorithms for the optimisation of wastewater treatment processes. In Computational Intelligence Techniques for Bioprocess Modelling Supervision and Control; Springer: Berlin/Heidelberg, Germany, 2009; pp. 163–195. [Google Scholar]
- Rossiter, J.A.; Kouvaritakis, B.; Gossner, J.R. Numerical robustness and efficiency of generalized predictive control algorithms with stability. In Proceedings of the 3rd IEEE Conference on Control Applications, Coventry, UK, 21–24 March 1994. [Google Scholar]
- Imsland, L.; Rossiter, J.A.; Pluymers, B.; Suykens, J. Robust triple mode MPC. Int. J. Control 2008, 81, 679–689. [Google Scholar] [CrossRef]
- El bahja, H.; Vega, P. Closed loop paradigm control based on positive invariance for a wastewater treatment plant. In Proceedings of the 3rd IEEE International Conference on Systems and Control (ICSC), Algiers, Algeria, 29–31 October 2013; pp. 314–319. [Google Scholar]
- Rossiter, J.A. Model-Based Predictive Control: A Practical Approach; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- El bahja, H.; Vega, P.; Tadeo, F.; Francisco, M. A constrained closed loop MPC based on positive invariance concept for a wastewater treatment plant. Int. J. Syst. Sci. 2018, 49, 2101–2115. [Google Scholar] [CrossRef]
- Zavala, V.M.; Flores-Tlacuahuac, A. Stability of multiobjective predictive control: A utopia-tracking approach. Automatica 2012, 48, 2627–2632. [Google Scholar] [CrossRef]
- Nadri, M.; Hammouri, H. Design of a continuous-discrete observer for state affine systems. Appl. Math. Lett. 2003, 16, 967–974. [Google Scholar] [CrossRef]
- Oguntuase, J.A. On an inequality of Gronwall. J. Inequalities Pure Appl. Math. 2001, 2, 1–6. [Google Scholar]
- Alex, J.; Benedetti, L.; Copp, J.; Gernaey, K.; Jeppsson, U.; Nopens, I.; Pons, M.; Rieger, L.; Rosen, C.; Steyer, J.; et al. Benchmark Simulation Model No. 1 (BSM1); Cod: LUTEDX-TEIE 7229. 1-62; Lund University: Lund, Sweden, 2008. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition | Unit |
|---|---|---|
| concentration | grN/m | |
| Nitrate and nitrite concentration | grN/m | |
| Readily biodegradable substrate concentration | grCOD/m | |
| Dissolved oxygen concentration | gr/m |
| Notation | Definition |
|---|---|
| Influent flow rate | |
| Influent organic matter concentration | |
| Influent ammonium compounds concentration | |
| Internal recycle flow | |
| Oxygen transfer coefficient | |
| Anoxic reactor volume | |
| Aerobic reactor volume |
| Notation | Definition |
|---|---|
| Oxygen saturation concentration | |
| Heterotrophic max. specific growth rate | |
| Half saturation coefficient for heterotrophs | |
| Oxygen saturation coefficient for heterotrophs | |
| Ammonia saturation coefficient for heterotrophs | |
| Oxygen saturation coefficient for autotrophs | |
| Heterotrophic yield | |
| Autotrophic yield | |
| Nitrogen fraction in biomass |
| Effluent Qualities | Upper Bound | Unit |
|---|---|---|
| 4 | mg/L | |
| 10 | mg/L | |
| 18 | mg/L | |
| 30 | mg/L | |
| 100 | mg/L | |
| 200 | d | |
| 3850 | m/d |
| Strategy Index | One Layer [9] | Two Layers | % |
|---|---|---|---|
| 1449.40 | 1190.40 | −17.87% | |
| 421.55 | 401.64 | −4.72% | |
| 5897.00 | 5845.00 | −0.88% | |
| 1870.90 | 1592.10 | −14.99% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El bahja, H.; Vega, P.; Tadeo, F. Integrating Dynamic Economic Optimization and Nonlinear Closed-Loop GPC: Application to a WWTP. Processes 2022, 10, 1821. https://doi.org/10.3390/pr10091821
El bahja H, Vega P, Tadeo F. Integrating Dynamic Economic Optimization and Nonlinear Closed-Loop GPC: Application to a WWTP. Processes. 2022; 10(9):1821. https://doi.org/10.3390/pr10091821
Chicago/Turabian StyleEl bahja, Hicham, Pastora Vega, and Fernando Tadeo. 2022. "Integrating Dynamic Economic Optimization and Nonlinear Closed-Loop GPC: Application to a WWTP" Processes 10, no. 9: 1821. https://doi.org/10.3390/pr10091821
APA StyleEl bahja, H., Vega, P., & Tadeo, F. (2022). Integrating Dynamic Economic Optimization and Nonlinear Closed-Loop GPC: Application to a WWTP. Processes, 10(9), 1821. https://doi.org/10.3390/pr10091821