
Fuzzy Gain Scheduling of the Fractional-Order PID Controller for a Continuous Stirred-Tank Reactor Process



Abstract
:1. Introduction
- -
- The dynamic characteristics of the highly nonlinear CSTR process were analyzed, and based on these characteristics, the entire operating range was divided into three regions.
- -
- Three local FOPID controllers were designed, one for each of the three operating regions.
- -
- For controller design, both the integral of absolute error (IAE) and control input change with weighting factor were simultaneously used as evaluation criteria.
- -
- A fuzzy gain scheduling technique was employed to integrate the three local controllers.
2. Modeling of a CSTR Process
2.1. Dimensionless State Space Model
2.2. Steady-State Characteristics
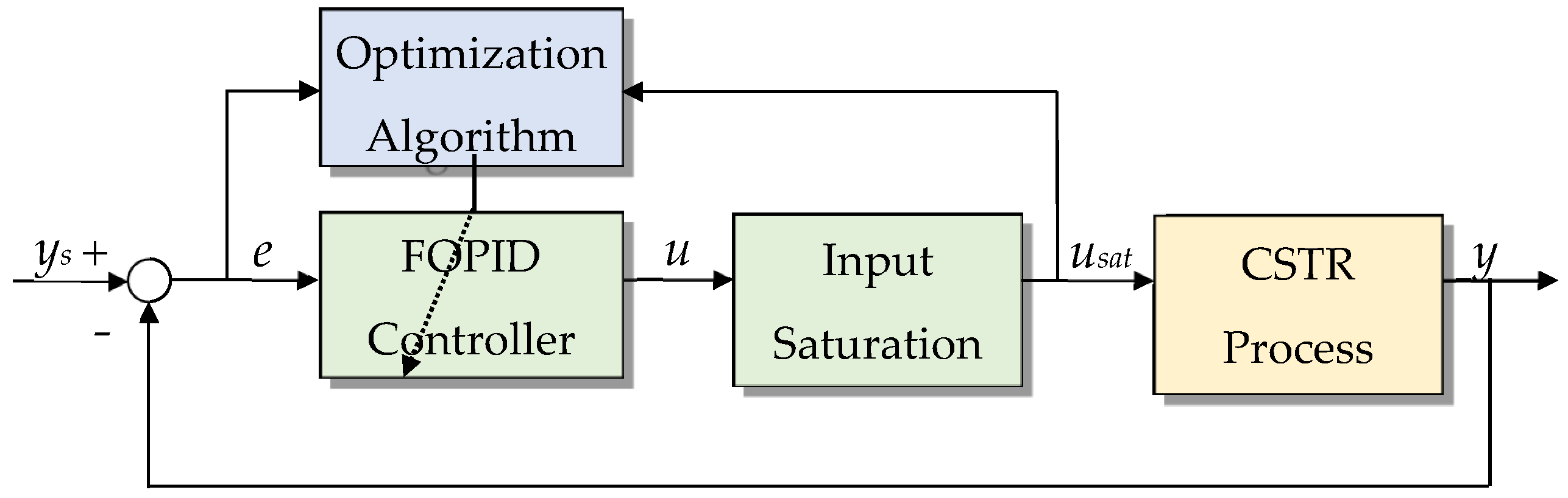
3. Fuzzy Gain Scheduling of the FOPID Controller
3.1. Fractional Calculus
3.2. FOPID Controllers as Local Controller
3.3. Tuning of the FOPID Controller
| Algorithm 1. Genetic Algorithm |
| Initialize a population randomly; Evaluate individuals in the population using Equation (11); While < termination condition not met > { Select individuals based on their fitness; Crossover individuals; Mutate individuals; Evaluate individuals in the new population using Equation (11); } Output the best solution; |
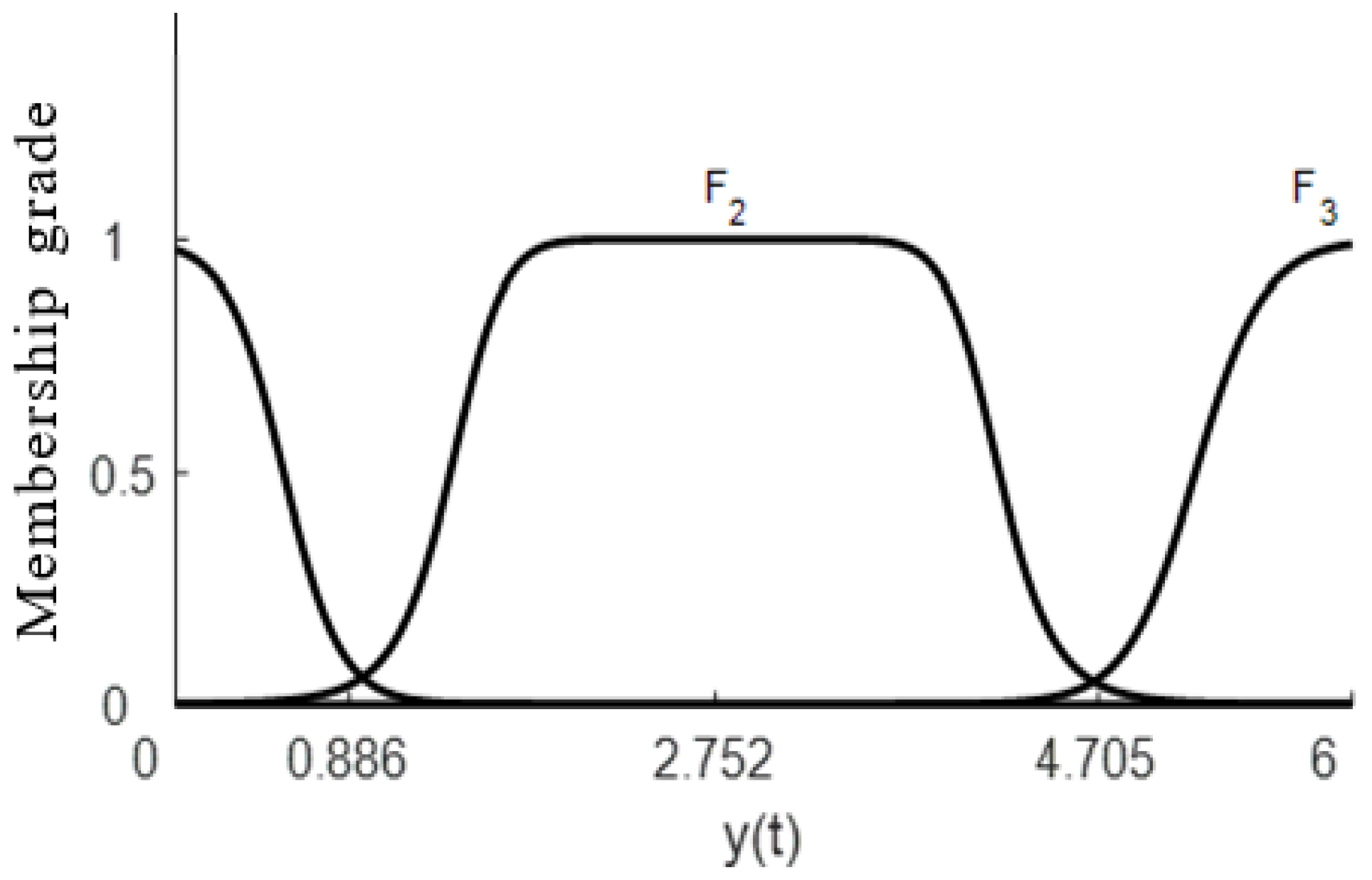
3.4. Fuzzy Gain Scheduling
4. Simulation Results
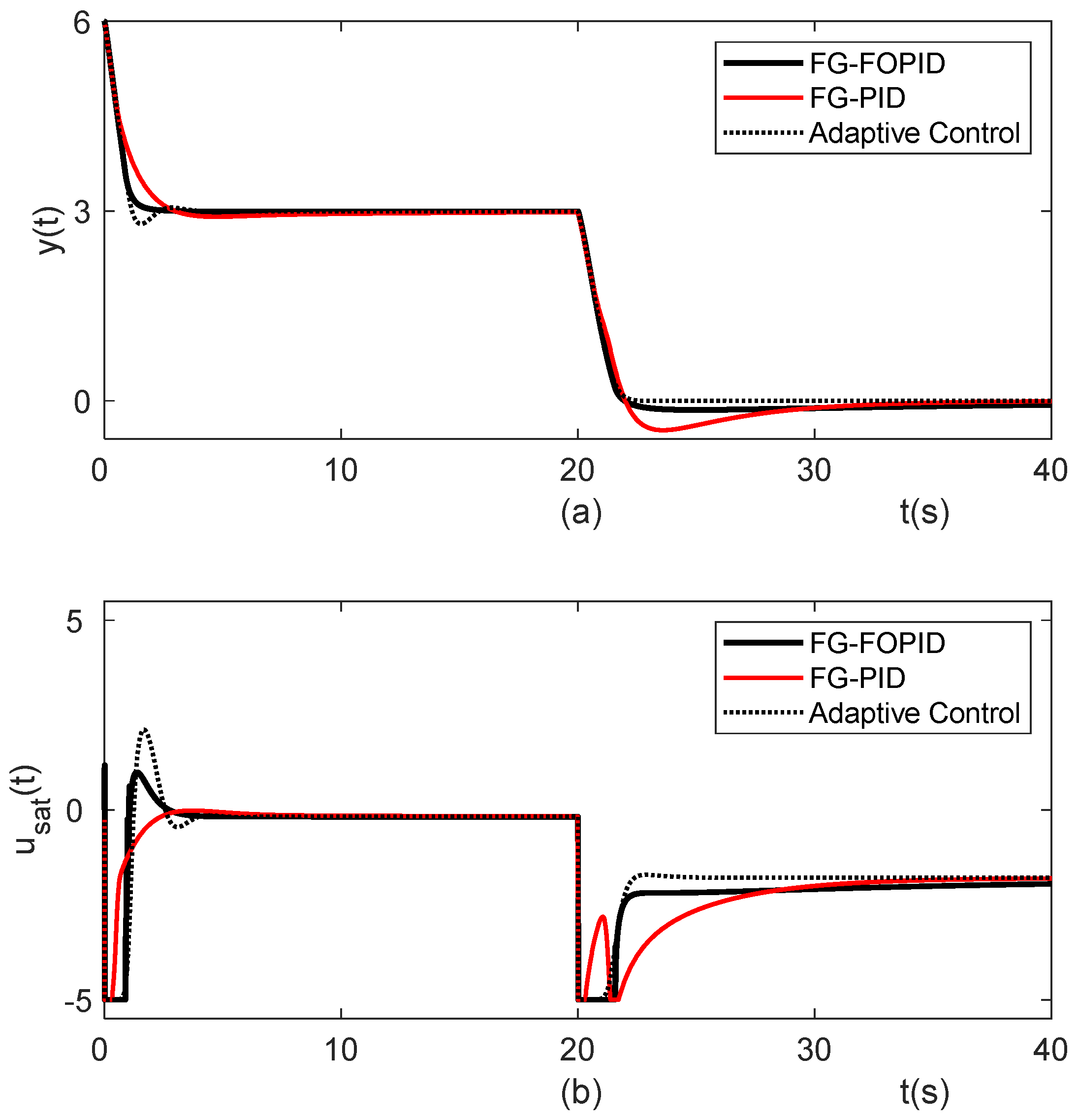
4.1. Set-Point Tracking Test
- Case 1: The initial output y is set to 0 with all initial settings. The set-point ys is changed stepwise from 0 to 3 at 0 s and again changed from 3 to 6 at 20 s.
- Case 2: The initial output y is set to 6 with all initial settings. ys is changed from 6 to 3 at 0 s and again changed from 3 to 0 at 20 s.
- Case 3: The initial output y is set to 0 with all initial settings. ys is changed from 0 to 2.7517 (unstable equilibrium) at 0 s and again changed to 0 at 20 s.
- Case 4: The initial output y is set to 6 with all initial settings. ys is changed from 6 to 2.7517 (unstable equilibrium) at 0 s and again changed to 6 at 20 s.
4.2. Disturbance Rejection Test
- Case 5: The initial output is kept at the set-point of 0.866 (stable equilibrium). Stepwise, disturbance d1 is changed from 0 to 0.1, while d2 is changed from 0 to −0.1 at 0 s.
- Case 6: The initial output is kept at the set-point of 0.866 (stable equilibrium). Stepwise, disturbance d1 is changed from 0 to −0.1, while d2 is changed from 0 to 0.1 at 0 s.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ray, W.H. Advanced Process Control; McGraw-Hill: New York, NY, USA, 1981. [Google Scholar]
- Mann, U. Chemical Reactor and Analyaia and Design, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Moran, S.; Henkel, K.D. Reactor types and their industrial applications. In Ullmann’s Encyclopedia of Industrial Chemistry; Wiley-VCH: Weinheim, Germany, 2016; pp. 1–49. [Google Scholar]
- Haan, A.B. Chemical reactors and their industrial applications. In Process Technology; De Gruyter: Berlin, Germany; Munich, Germany; Boston, MA, USA, 2015; pp. 51–78. [Google Scholar]
- Suo, L.; Ren, J.; Zhao, Z.; Zhai, C. Study on the nonlinear dynamics of the continuous stirred tank reactors. Processes 2020, 8, 1436. [Google Scholar] [CrossRef]
- Kenechukwu, O.T.; Igbokwe, P.K. Proportional-integral-derivative control (PID) of a continuous stirred tank reactor (CSTR). Int. J. Eng. Sci. (IJES) 2015, 4, 66–73. [Google Scholar]
- Baruah, S.; Dewan, L. A comparative study of PID based temperature control of CSTR using genetic algorithm and particle swarm optimization. In Proceedings of the 2017 International Conference on Emerging Trends in Computing and Communication Technologies, Dehradun, India, 17–18 November 2018; pp. 1–6. [Google Scholar]
- Boobalan, S.; Prabhu, K. Temperature controller for continuous stirred tank reactor using adaptive PSO based PID controller. Int. J. Eng. Comput. Sci. 2016, 5, 19103–19107. [Google Scholar] [CrossRef]
- Meghna, P.R.; Saranya, V.; Pandian, B.J. Design of linear-quadratic-regulator for a CSTR process. IOP Conf. Ser. Mater. Sci. Eng. 2017, 263, 052013. [Google Scholar] [CrossRef]
- Sundari, S.; Nachiappan, A. Design of optimal linear quadratic regulator for the stabilization of continuous stirred tank reactor (CSTR) process. Int. J. Pure Appl. Math. 2018, 118, 1–19. [Google Scholar]
- Ye, Z.; Dongya, Z.; Sarah, K.S. Disturbance observer based adaptive sliding mode control for continuous stirred tank reactor. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 411–416. [Google Scholar]
- Sinha, A.; Mishra, R.K. Temperature regulation in a continuous stirred tank reactor using event triggered sliding mode control. IFAC-PapersOnLine 2018, 51, 401–406. [Google Scholar] [CrossRef]
- Gao, D.X.; Liu, H. Optimal dynamic control for CSTR nonlinear system based on feedback linearization. In Proceedings of the 27th Chinese Control and Decision Conference (CCDC), Qingdao, China, 23–25 May 2015; pp. 1298–1302. [Google Scholar]
- Hajaya, M. Control of a benchmark CSTR using feedback linearization. Jordanian J. Eng. Chem. Ind. 2019, 2, 67–75. [Google Scholar]
- Lakshmi, V.; Maheshan, C.M. Fuzzy logic control of continuous stirred tank fermenter. J. Emerg. Technol. Innov. Res. 2021, 8, 461–474. [Google Scholar]
- Prabhu, K.; Dharani, P.; Vijayachitra, D.S.; Kavya, C. Design of fuzzy–PID controller for continuous stirred tank reactor plant. Nat. Volatiles Essent. Oils J. 2021, 8, 199–205. [Google Scholar]
- Podlubny, I.; Dorčák, L.; Kostial, I. On fractional derivatives, fractional-order dynamic systems and PIλDµ controllers. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 12 December 1997; Volume 5, pp. 4985–4990. [Google Scholar]
- Padula, F.; Visioli, A. Advances in Robust Fractional Control; Springer: New York, NY, USA, 2015. [Google Scholar]
- El-Shafei, M.A.K.; El-Hawwary, M.I.; Emara, H.M. Implementation of fractional-order PID controller in an industrial distributed control system. In Proceedings of the 2017 14th International Multi-Conference on Systems, Signals & Devices (SSD), Marrakech, Morocco, 28–31 March 2017; pp. 713–718. [Google Scholar]
- Aseem, K.; Subeekrishna, M.P. Comparitive study of PID and fractional order PID controllers for industrial applications. Int. J. Eng. Res. Technol. 2019, 7, 1–3. [Google Scholar]
- Nie, Z.; Zheng, Y.; Wang, Q.; Liu, R.; Xiang, L. Fractional-order PID controller design for time-delay systems based on modified Bode’s ideal transfer function. IEEE Access 2020, 8, 103500–103510. [Google Scholar]
- Leith, D.J.; Leithead, W.E. Survey of gain-scheduling analysis and design. Int. J. Control 2000, 73, 1001–1025. [Google Scholar] [CrossRef]
- Ranjan, A. Gain-scheduled feedback controller design for a nonlinear continuous stirred tank reactor. In Proceedings of the 2020 International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Patna, India, 10–11 July 2020. [Google Scholar]
- Kim, J.; Ko, K.; Jin, G. Temperature control of a CSTR using fuzzy gain scheduling. J. Inst. Control Robot. Syst. 2013, 19, 839–845. [Google Scholar] [CrossRef]
- Bingi, K.; Ibrahim, R.; Karsiti, M.N.; Hassan, S.M. Fuzzy gain scheduled set-point weighted PID controller for unstable CSTR systems. In Proceedings of the 2017 IEEE International Conference on Signal and Image Processing Applications (ICSIPA), Kuching, Malaysia, 12–14 September 2017; pp. 289–293. [Google Scholar]
- Fábregas, J.; Palencia, A. Fuzzy gain scheduling: Comparison of the control strategy. J. Eng. Sci. Technol. 2022, 17, 1356–1368. [Google Scholar]
- Tepljakov, A. FOMCON Toolbox for MATLAB. Available online: https://fomcon.net/ (accessed on 15 August 2023).
- Chen, C.T.; Peng, S.T. Learning control of process systems with hard input constraints. J. Process Control 1999, 9, 151–160. [Google Scholar] [CrossRef]
- So, G.; Jin, G. Fuzzy-based nonlinear PID controller and its application to CSTR. Korean J. Chem. Eng. 2018, 35, 819–825. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Local Controllers | Parameters | ||||
|---|---|---|---|---|---|
| Kp | Ki | Kd | λ | μ | |
| FOPID 1 | 36.547 | 3.317 | 14.189 | 0.905 | 0.539 |
| FOPID 2 | 30.497 | 4.456 | 13.611 | 0.347 | 0.582 |
| FOPID 3 | 17.339 | 4.067 | 11.862 | 0.901 | 0.629 |
| PID 1 | 6.516 | 2.015 | 3.179 | - | - |
| PID 2 | 3.962 | 0.280 | 2.629 | - | - |
| PID 3 | 5.841 | 2.693 | 2.561 | - | - |
| Methods | ys = 0 → 3 | |||
|---|---|---|---|---|
| tr | Mp | ts | IAE | |
| FG-FOPID | 1.707 | 0.841 | 1.791 | 3.068 |
| FG-PID | 2.602 | 10.168 | 10.420 | 5.962 |
| Adaptive control | 1.528 | 13.772 | 2.706 | 3.020 |
| ys = 3 → 6 | ||||
| FG-FOPID | 0.877 | 9.052 | 8.765 | 4.020 |
| FG-PID | 1.075 | 8.274 | 4.182 | 2.820 |
| Adaptive control | 0.715 | 9.580 | 2.016 | 1.963 |
| Methods | ys = 6 → 3 | |||
|---|---|---|---|---|
| tr | Mp | ts | IAE | |
| FG-FOPID | 1.230 | 0.303 | 1.299 | 1.905 |
| FG-PID | 2.240 | 2.958 | 2.302 | 3.181 |
| Adaptive control | 1.011 | 6.738 | 1.839 | 1.866 |
| ys = 3 → 0 | ||||
| FG-FOPID | 1.548 | 4.767 | 1.650 | 4.332 |
| FG-PID | 1.749 | 15.470 | 8.904 | 5.389 |
| Adaptive control | 1.644 | 0 | 1.751 | 2.522 |
| Methods | ys = 0 → 2.7517 | |||
|---|---|---|---|---|
| tr | Mp | ts | IAE | |
| FG-FOPID | 1.647 | 0.643 | 1.724 | 2.501 |
| FG-PID | 2.762 | 7.598 | 8.517 | 4.896 |
| Adaptive control | 1.460 | 10.377 | 2.512 | 2.507 |
| ys = 2.7517 → 0 | ||||
| FG-FOPID | 1.865 | 0 | 1.642 | 2.487 |
| FG-PID | 1.959 | 8.611 | 6.761 | 3.992 |
| Adaptive control | 1.591 | 0 | 1.688 | 2.200 |
| Methods | ys = 6 → 2.7517 | |||
| tr | Mp | ts | IAE | |
|---|---|---|---|---|
| FG-FOPID | 1.302 | 0.489 | 1.376 | 2.296 |
| FG-PID | 2.227 | 4.962 | 2.294 | 4.240 |
| Adaptive control | 1.093 | 6.352 | 1.938 | 2.162 |
| ys = 2.7517 → 6 | ||||
| FG-FOPID | 1.874 | 0 | 1.968 | 2.506 |
| FG-PID | 1.125 | 8.119 | 4.030 | 3.259 |
| Adaptive control | 0.760 | 11.649 | 2.014 | 2.274 |
| Scenario | Methods | Performance Indices | |||
|---|---|---|---|---|---|
| tpeak | Mpeak | trcy | IAE | ||
| Case 5 | FG-FOPID | 3.153 | 0.015 | 136.49 | 0.812 |
| FG-PID | 2.410 | 0.069 | 20.245 | 0.553 | |
| Adaptive control | 0.740 | 0.027 | 4.673 | 0.059 | |
| Case 6 | FG-FOPID | 3.232 | 0.015 | 135.60 | 0.790 |
| FG-PID | 3.090 | 0.091 | 10.605 | 0.571 | |
| Adaptive control | 0.750 | 0.028 | 4.527 | 0.059 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wase, M.G.; Gebrekirstos, R.F.; Jin, G.-G.; So, G.-B. Fuzzy Gain Scheduling of the Fractional-Order PID Controller for a Continuous Stirred-Tank Reactor Process. Processes 2023, 11, 3275. https://doi.org/10.3390/pr11123275
Wase MG, Gebrekirstos RF, Jin G-G, So G-B. Fuzzy Gain Scheduling of the Fractional-Order PID Controller for a Continuous Stirred-Tank Reactor Process. Processes. 2023; 11(12):3275. https://doi.org/10.3390/pr11123275
Chicago/Turabian StyleWase, Minyamer Gelawe, Rahel Fitwi Gebrekirstos, Gang-Gyoo Jin, and Gun-Baek So. 2023. "Fuzzy Gain Scheduling of the Fractional-Order PID Controller for a Continuous Stirred-Tank Reactor Process" Processes 11, no. 12: 3275. https://doi.org/10.3390/pr11123275
APA StyleWase, M. G., Gebrekirstos, R. F., Jin, G.-G., & So, G.-B. (2023). Fuzzy Gain Scheduling of the Fractional-Order PID Controller for a Continuous Stirred-Tank Reactor Process. Processes, 11(12), 3275. https://doi.org/10.3390/pr11123275