
Leakage Characteristics of Proportional Directional Valve


Abstract
:1. Introduction
2. Experimental and Analytical Methods
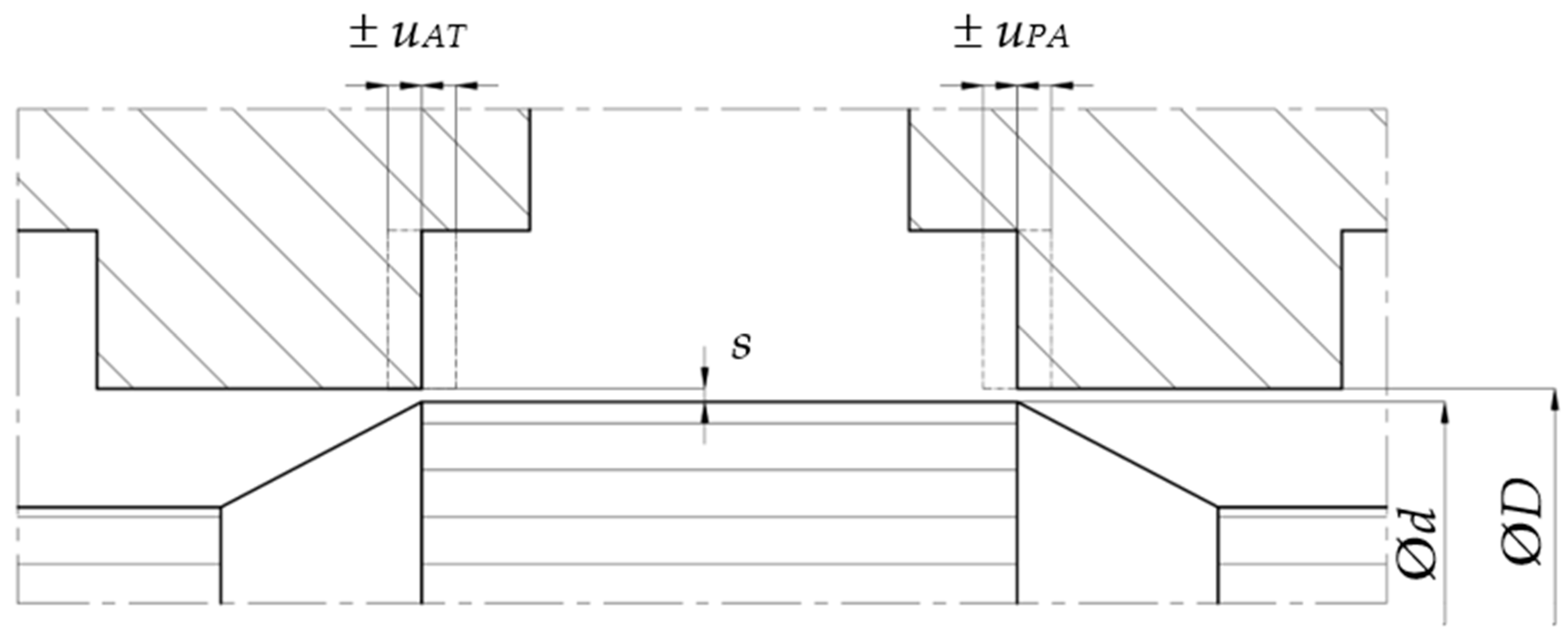
2.1. General Valve Analysis
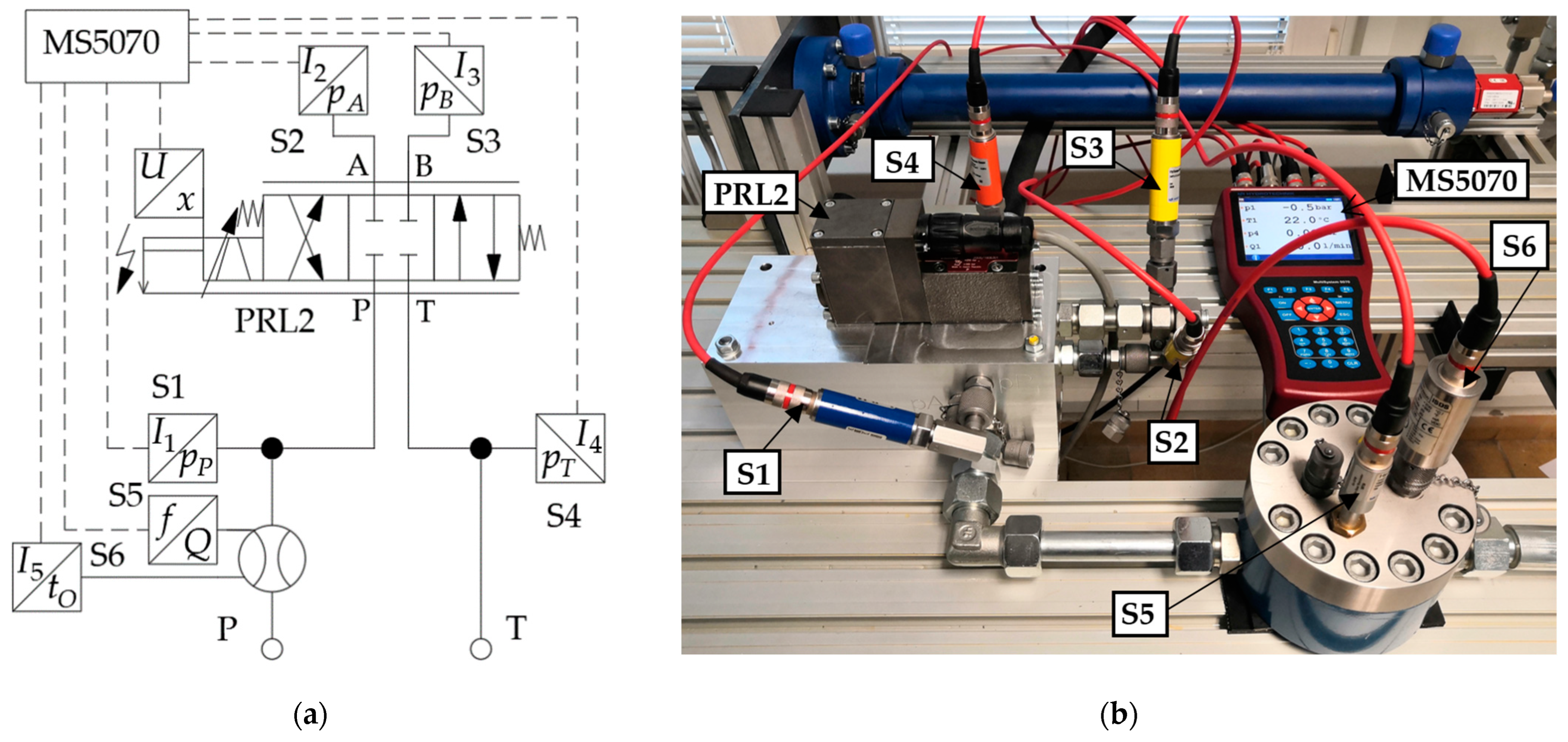
2.2. Experimental Test Stand
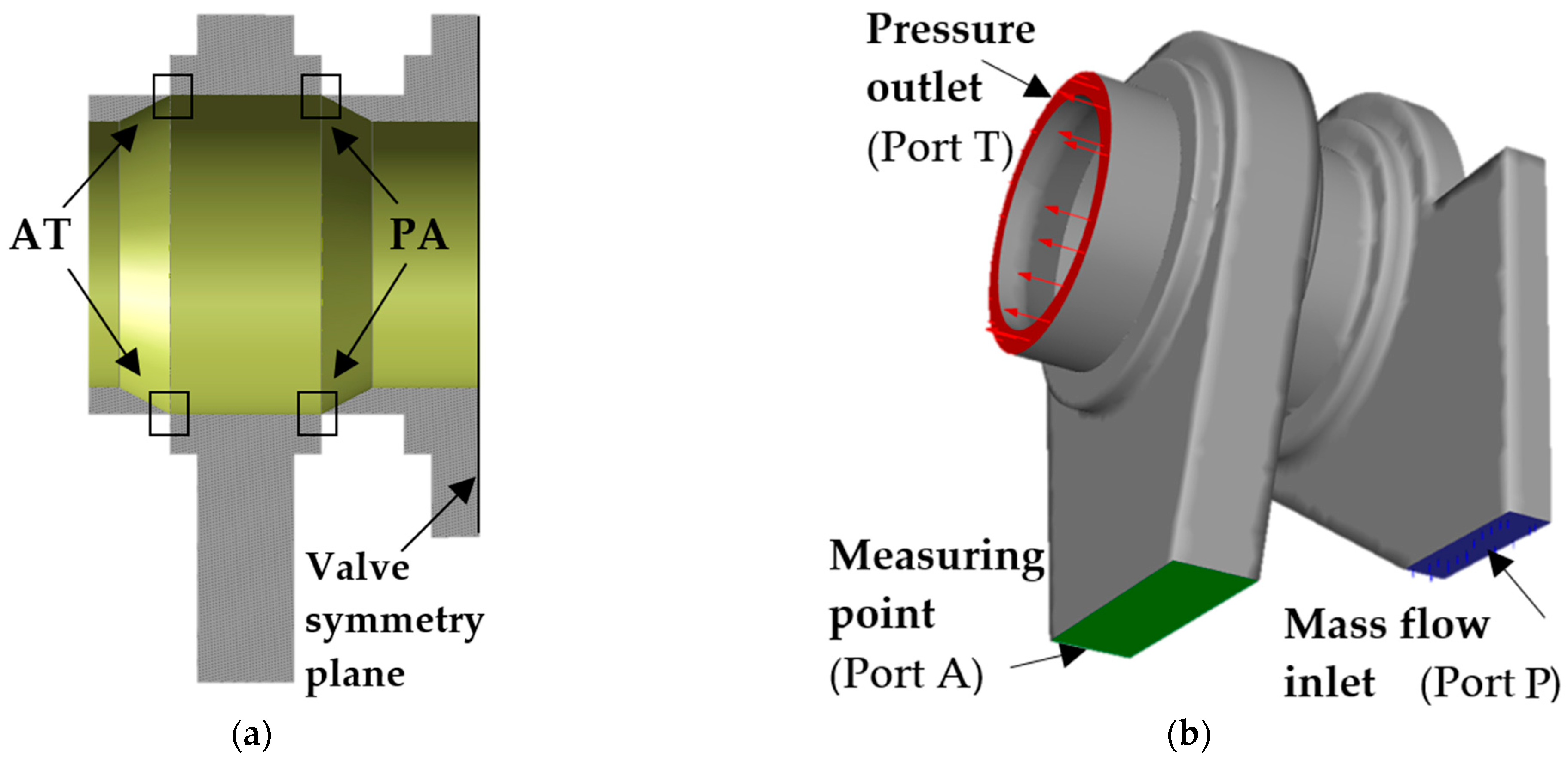
2.3. Numerical Simulation
3. Results and Discussion
3.1. Experimental Measurements
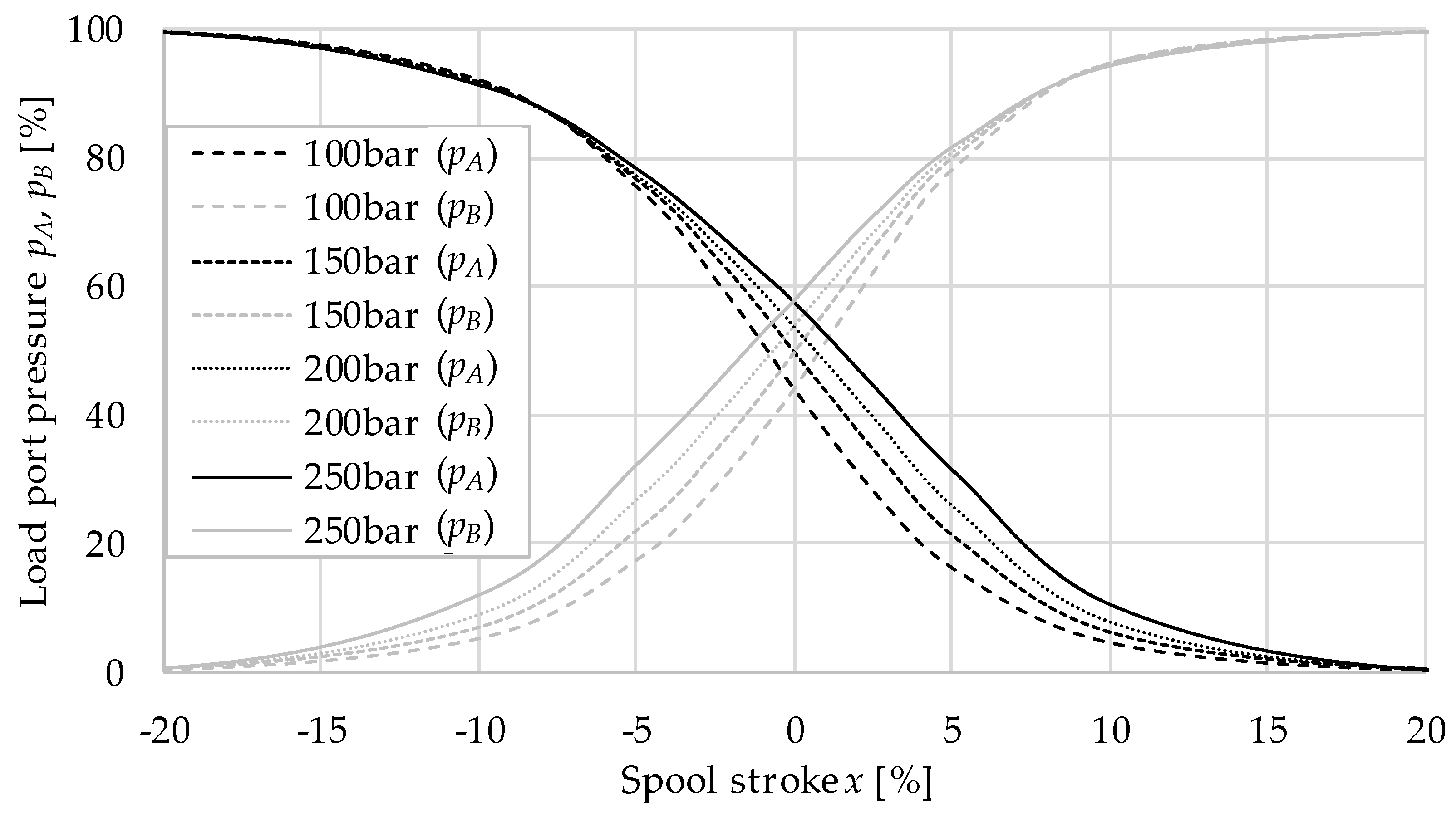
3.1.1. Blocked-Line Pressure Sensitivity Curve
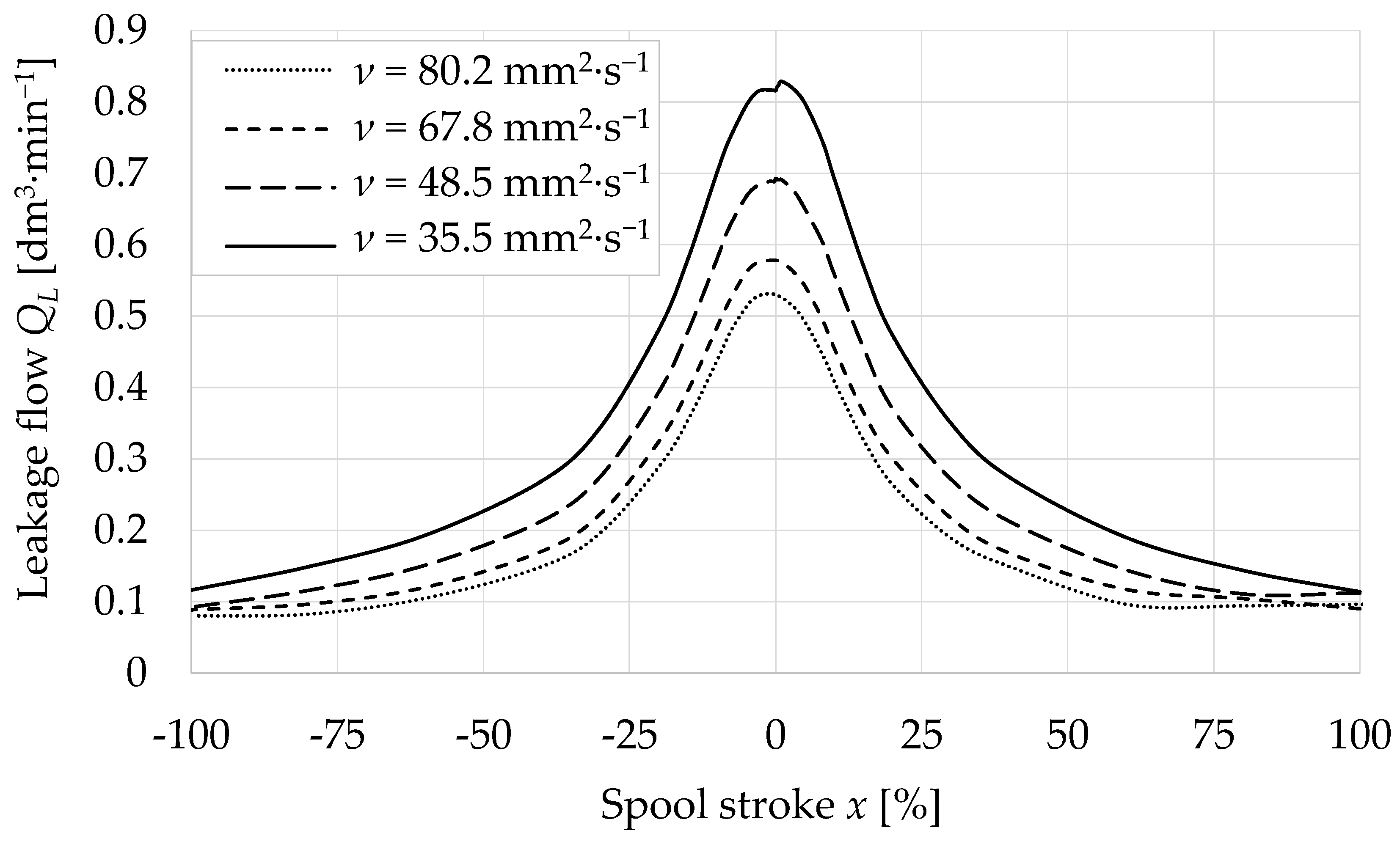
3.1.2. Leakage Flow Curve
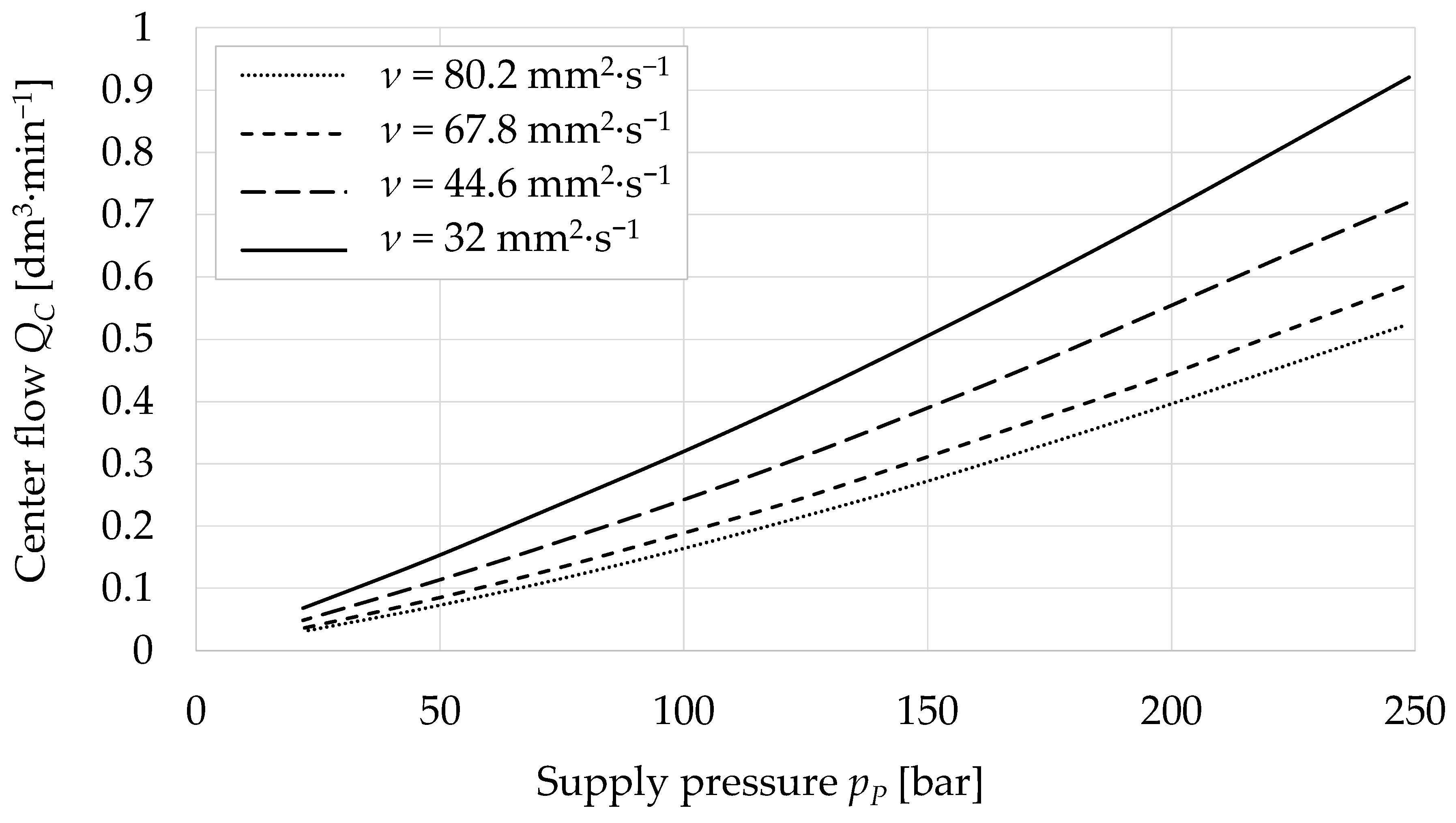
3.1.3. Center Flow Curve
3.2. Numerical Simulation
4. Conclusions
- (1)
- Measurements shows that the pressure sensitivity curve changes significantly for different supply pressures. For different oil viscosities, the pressure sensitivity curve changes only minimally. The magnitude of the leakage flow changes over the entire range of the spool stroke depending on the supply pressure and oil viscosity. The magnitude of the center flow is also significantly affected by the oil viscosity.
- (2)
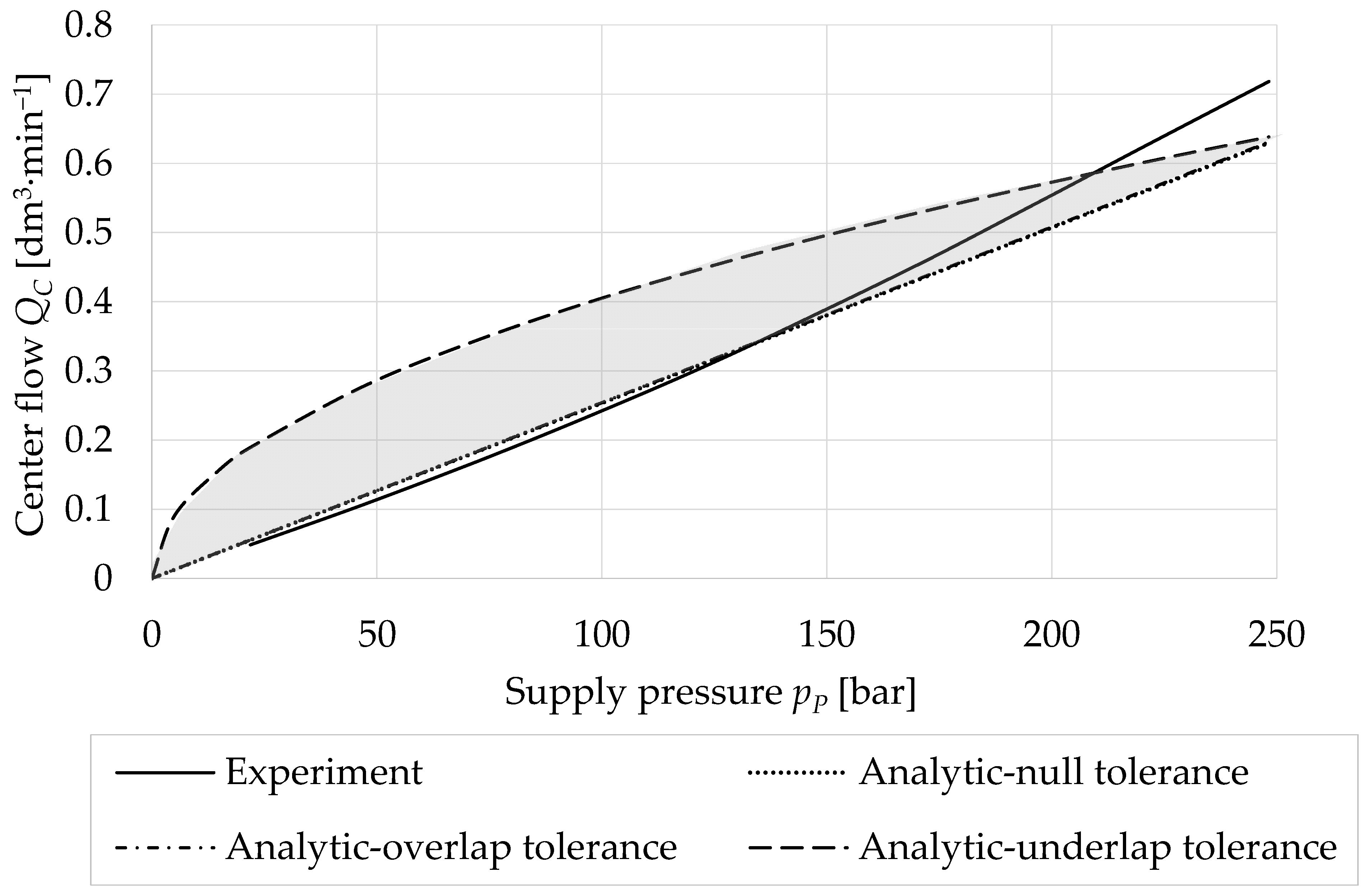
- From comparison, the experimentally measured dependence of the center flow curve nearly matches analytically determined dependences for null tolerance and overlap tolerance in the lower flow rate area. At higher center flow, the experimentally determined pressure drop at the spool is lower than in the case of the analytical calculation for the null tolerance and the overlap tolerance.
- (3)
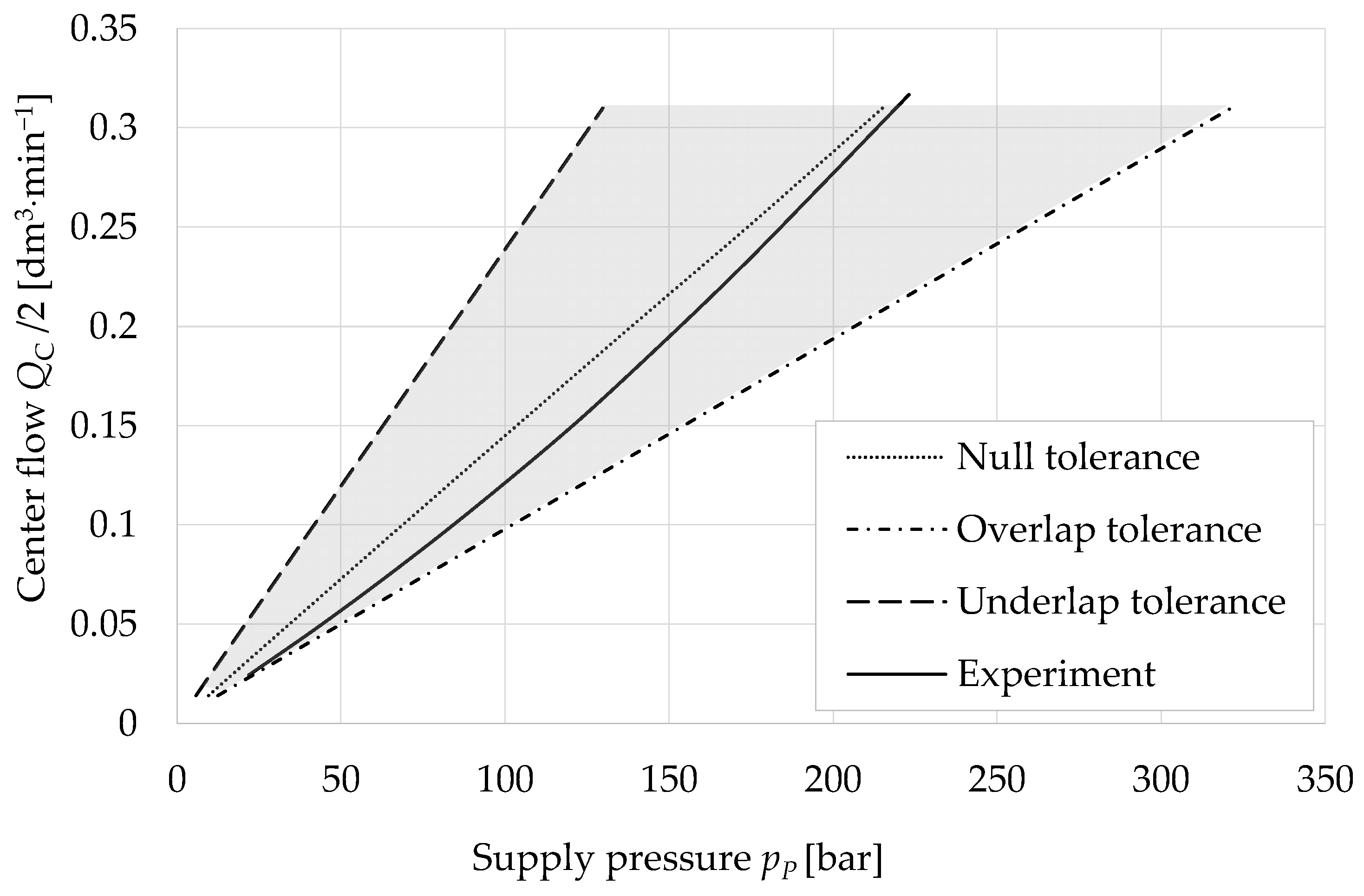
- The overlap tolerance curve and the underlap tolerance curve, determined by numerical simulations, define the range of center flow that is affected by the maximum allowable manufacturing tolerance. The null tolerance curve, determined by numerical simulation, defines the center flow for the ideal zero spool lap geometry.
- (4)
- The experimentally determined center flow curve is within the specified range defined by the selected tolerance. The comparison of the numerical simulation and the experiment also shows that the slight overlap of control edges can be predicted for the measured valve.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hružík, L.; Bureček, A.; Vašina, M. Effect of Oil Viscosity on Pulsating Flow in Pipe. Mech. Mach. Sci. 2017, 44, 137–143. [Google Scholar] [CrossRef]
- Soon, C.C.; Ghazali, R.; Jaafar, H.I.; Hussien, S.Y.S.; Sam, Y.M.; Rahmat, M.F. The Effects of Parameter Variation in Open-Loop and Closed-Loop Control Scheme for an Electro-Hydraulic Actuator System. Int. J. Control. Autom. 2016, 9, 283–294. [Google Scholar] [CrossRef]
- Li, S.; Du, J.; Shi, Z.; Xu, K.; Shi, W. Characteristics Analysis of the Pilot-Operated Proportional Directional Valve by Experimental and Numerical Investigation. Energies 2022, 15, 9418. [Google Scholar] [CrossRef]
- Gordić, D.; Babić, M.; Milovanović, D.; Savić, S. Spool valve leakage behaviour. Arch. Civ. Mech. Eng. 2011, 11, 859–866. [Google Scholar] [CrossRef]
- Ledvoň, M.; Hružík, L.; Bureček, A.; Dýrr, F. Experimental and Numerical Analysis of Leakage Characteristics of Proportional Directional Valve. MATEC Web Conf. 2022, 369, 02007. [Google Scholar] [CrossRef]
- Mondal, M.K.; Manna, N.K.; Saha, R. Study of leakage flow through a spool valve under blocked-actuator port condition—Simulation and experiment. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2014, 228, 1405–1417. [Google Scholar] [CrossRef]
- Eryilmaz, B.; Wilson, B.H. Modeling the internal leakage of hydraulic servovalves. ASME Int. Mech. Eng. Congr. Expo. 2000, 26645, 337–343. [Google Scholar] [CrossRef]
- Mao, X.; Wu, C.; Ding, H.; Li, B.; Liu, Y. Effect Analysis of Leakage in the Middle Position and Improvement of an O-type 3-position-4-way Directional Valve with the Spool Structure. IOP Conf. Ser.-Earth Environ. Sci. 2020, 508, 012160. [Google Scholar] [CrossRef]
- Tamburrano, P.; Plummer, A.R.; Elliott, P.; De Palma, P.; Distaso, E.; Amirante, R. Internal leakage in the main stage of servovalves: An analytical and CFD analysis. AIP Conf. Proc. 2019, 2191, 020146. [Google Scholar] [CrossRef]
- Afatsun, A.C.; Tuna Balkan, R. A mathematical model for simulation of flow rate and chamber pressures in spool valves. J. Dyn. Syst. Meas. Control. 2019, 141, 021004. [Google Scholar] [CrossRef]
- Lu, Z.; Zhang, J.; Xu, B.; Wang, D.; Su, Q.; Qian, J.; Yang, G.; Pan, M. Deadzone compensation control based on detection of micro flow rate in pilot stage of proportional directional valve. ISA Trans. 2019, 94, 234–245. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Fu, W.; Yuan, X.; Meng, Z. Research on Optimal Control of Excavator Negative Control Swing System. Processes 2020, 8, 1096. [Google Scholar] [CrossRef]
- Tang, W.; Xu, G.; Zhang, S.; Jin, S.; Wang, R. Digital twin-driven mating performance analysis for precision spool valve. Machines 2021, 9, 157. [Google Scholar] [CrossRef]
- Rituraj, R.; Scheidl, R. Stability Analysis of Spools with Imperfect Sealing Gap Geometries. Int. J. Fluid Power 2021, 21, 383–404. [Google Scholar] [CrossRef]
- Chen, Y.; Gong, W.; Kang, R. Coupling behaviour between adhesive and abrasive wear mechanism of aero-hydraulic spool valves. Chin. J. Aeronaut. 2016, 29, 1119–1131. [Google Scholar] [CrossRef]
- Liu, X.; Ji, H.; Min, W.; Zheng, Z.; Wang, J. Erosion behaviour and influence of solid particles in hydraulic spool valve without notches. Eng. Fail. Anal. 2020, 108, 104262. [Google Scholar] [CrossRef]
- Fang, X.; Yao, J.; Yin, X.; Chen, X.; Zhang, C. Physics-of-failure models of erosion wear in electrohydraulic servovalve, and erosion wear life prediction method. Mechatronics 2013, 23, 1202–1214. [Google Scholar] [CrossRef]
- Song, F.; Peng, L.; Chen, J.; Wang, B. Internal Leakage Predicition of Hydraulic Spool Valves Based on Acoustic Emission Technology. J. Phys. Conf. Ser. 2021, 2113, 012016. [Google Scholar] [CrossRef]
- Chen, Q.; Ji, H.; Zhao, H.; Zhao, J. Optimization Algorithm and Joint Simulation to Micro Thermal Deformation Using Temperature Measurement in the Orifice of Hydraulic Valve. Processes 2020, 8, 1136. [Google Scholar] [CrossRef]
- Ledvoň, M.; Polášek, T.; Bureček, A.; Hružík, L. Modeling and Dynamic Analysis Directional Valve. AIP Conf. Proc. 2019, 2118, 030026. [Google Scholar] [CrossRef]
- Manring, N.D. Hydraulic Control Systems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
- Fitch, E.C.; Hong, I.T. Hydraulic Component Design and Selection; BarDyne: Stillwater, OK, USA, 1998. [Google Scholar]
- Merritt, H.E. Hydraulic Control Systems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1967. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x < 0 | i = 1, 3 | i = 2, 4 | - |
| x = 0 | - | - | i = 1, 2, 3, 4 |
| x > 0 | i = 2, 4 | i = 1, 3 | - |
| Sensors | Measuring Range | Measuring Accuracy |
|---|---|---|
| Pressure sensor S1 | (0–400) bar | ±0.25% of full scale |
| Pressure sensor S2, S3 | (0–250) bar | ±0.25% of full scale |
| Pressure sensor S4 | (0–60) bar | ±0.25% of full scale |
| Flow meter S5 | (0.05–5) dm3·min−1 | up to ±0.4% of reading |
| Temperature sensor S6 | (−50–200) °C | 0.3 + 0.005·tO °C |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ledvoň, M.; Hružík, L.; Bureček, A.; Dýrr, F.; Polášek, T. Leakage Characteristics of Proportional Directional Valve. Processes 2023, 11, 512. https://doi.org/10.3390/pr11020512
Ledvoň M, Hružík L, Bureček A, Dýrr F, Polášek T. Leakage Characteristics of Proportional Directional Valve. Processes. 2023; 11(2):512. https://doi.org/10.3390/pr11020512
Chicago/Turabian StyleLedvoň, Marian, Lumír Hružík, Adam Bureček, Filip Dýrr, and Tomáš Polášek. 2023. "Leakage Characteristics of Proportional Directional Valve" Processes 11, no. 2: 512. https://doi.org/10.3390/pr11020512
APA StyleLedvoň, M., Hružík, L., Bureček, A., Dýrr, F., & Polášek, T. (2023). Leakage Characteristics of Proportional Directional Valve. Processes, 11(2), 512. https://doi.org/10.3390/pr11020512