

New Energy Power System Dynamic Security and Stability Region Calculation Based on AVURPSO-RLS Hybrid Algorithm

Abstract
:1. Introduction
- I.
- Search for critical points—(1) Given the system topology, we seek the fault occurrence point, fault type, fault clearance time, and other basic parameters. (2) Given the injection vector y with calculated power initial value, the injection point is assessed in terms of whether it belongs to the critical injection point via the numerical simulation method or the direct method;
- II.
- The judgment of the critical point. When judging the critical injection power point, the critical point can be expressed as the point between the stable region and the unstable region, which is a kind of transition point;
- III.
- Fitting of critical surfaces. After selecting the critical point group for a particular case, the above approach requires screening. There are also studies that use some fast search hyperplane methods that can shorten the computation time while maintaining accuracy. In summary, the key to obtaining a DSSR boundary is to locate sufficient critical points as quickly as possible, and then fit them effectively. In particular, one must quickly locate critical points from a large number of operating points in the high-dimension nodal injection space.
2. Mathematical Model of New Energy Power System
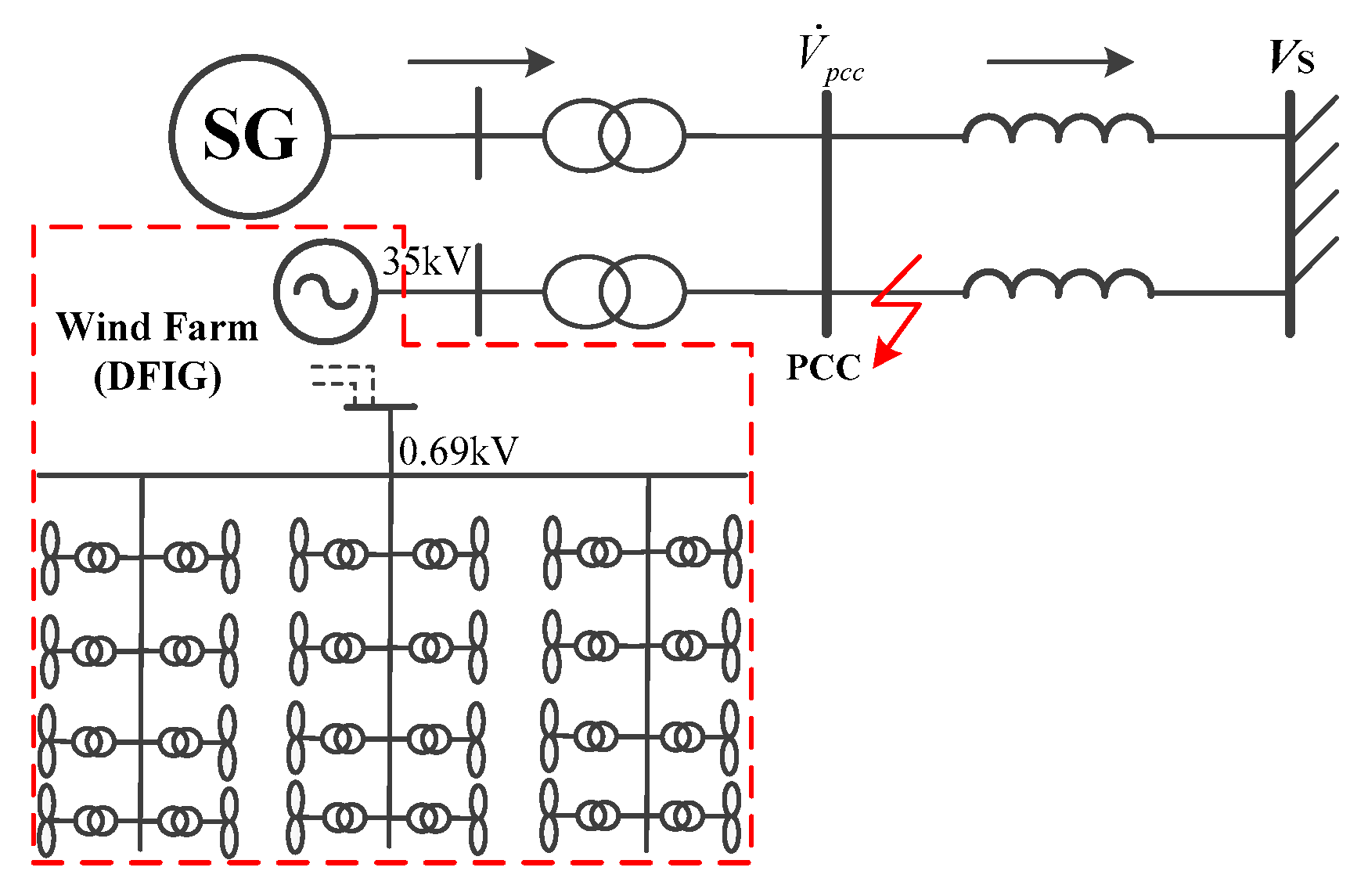
2.1. Power System Model
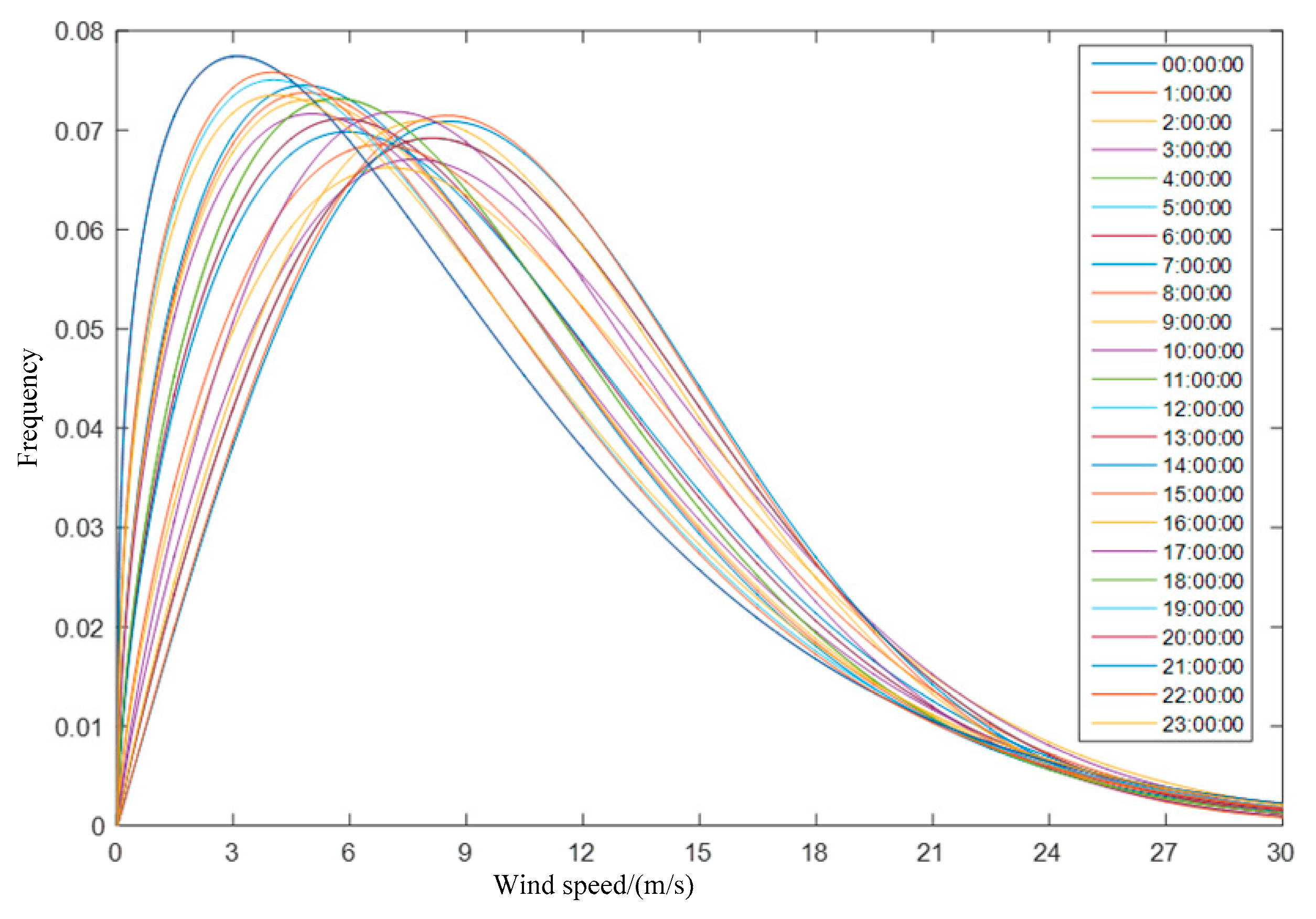
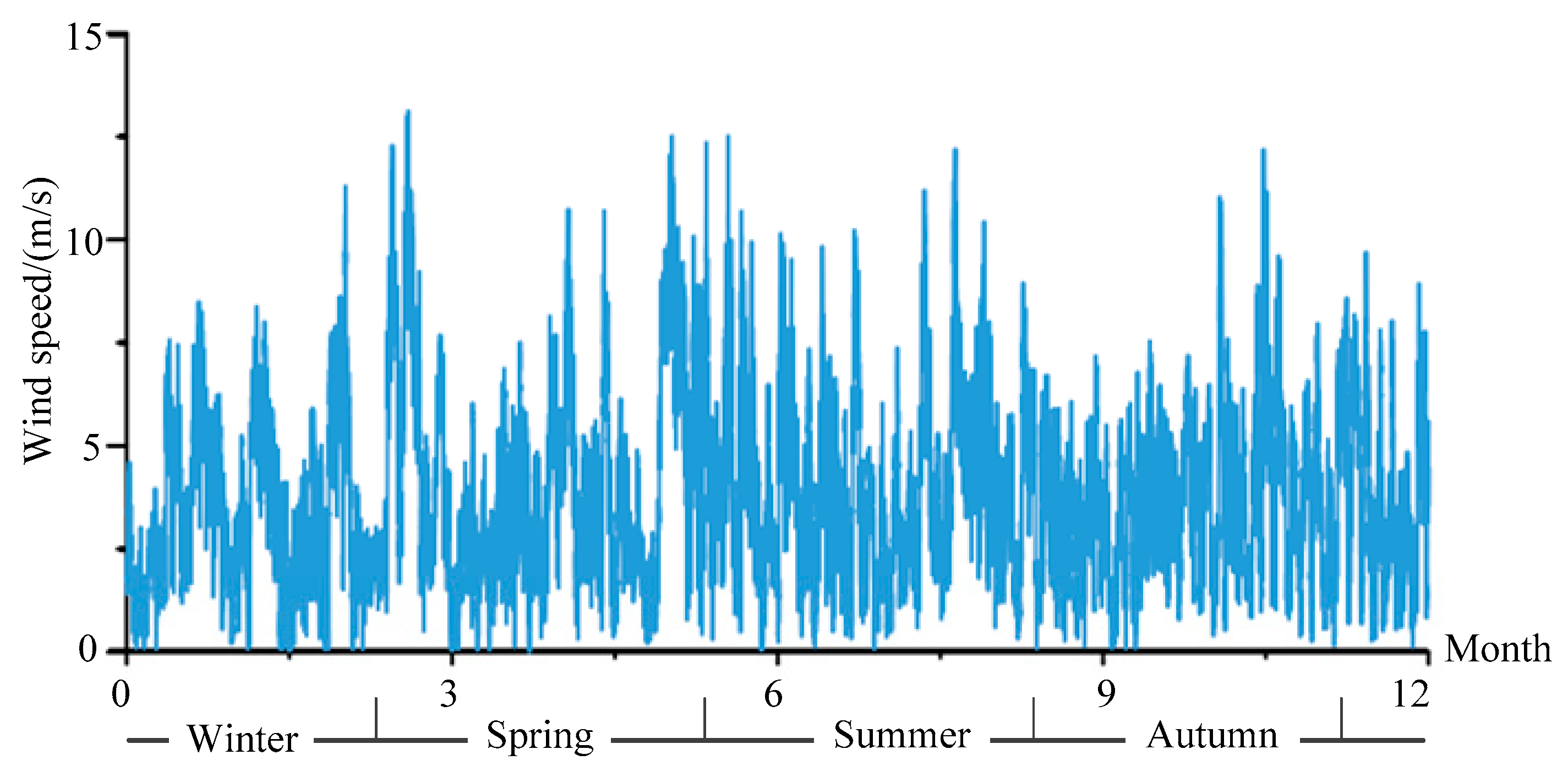
2.2. Uncertainty Model of Wind Power Output
3. Mathematical Model of DSSR
3.1. Security Constraints and SSR of the Grid
3.2. DSSR Boundary of Power System
3.3. Hyperplane Equation Construction
4. Study of the AVURPSO-RLS Approach for Hyperplane Fitting
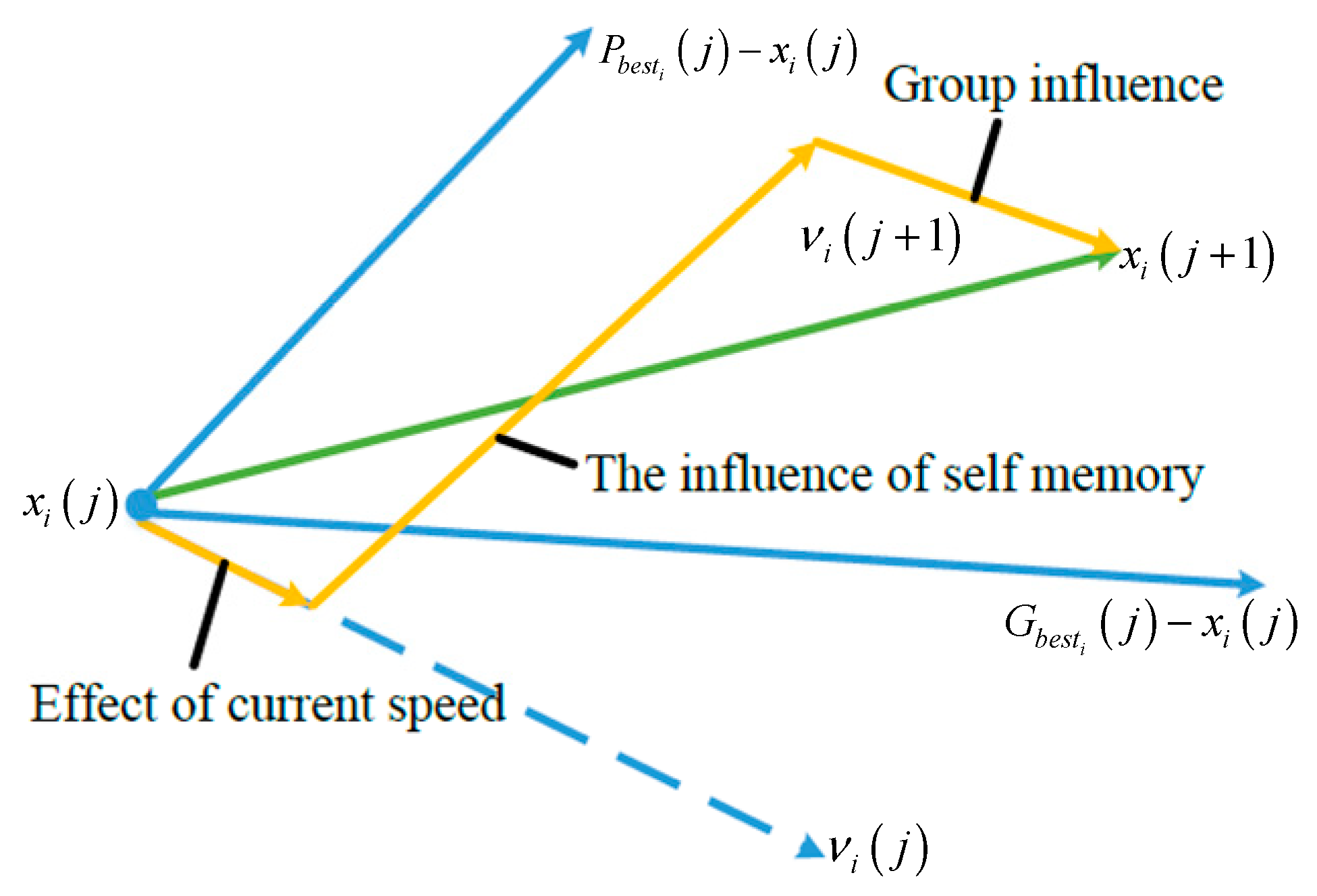
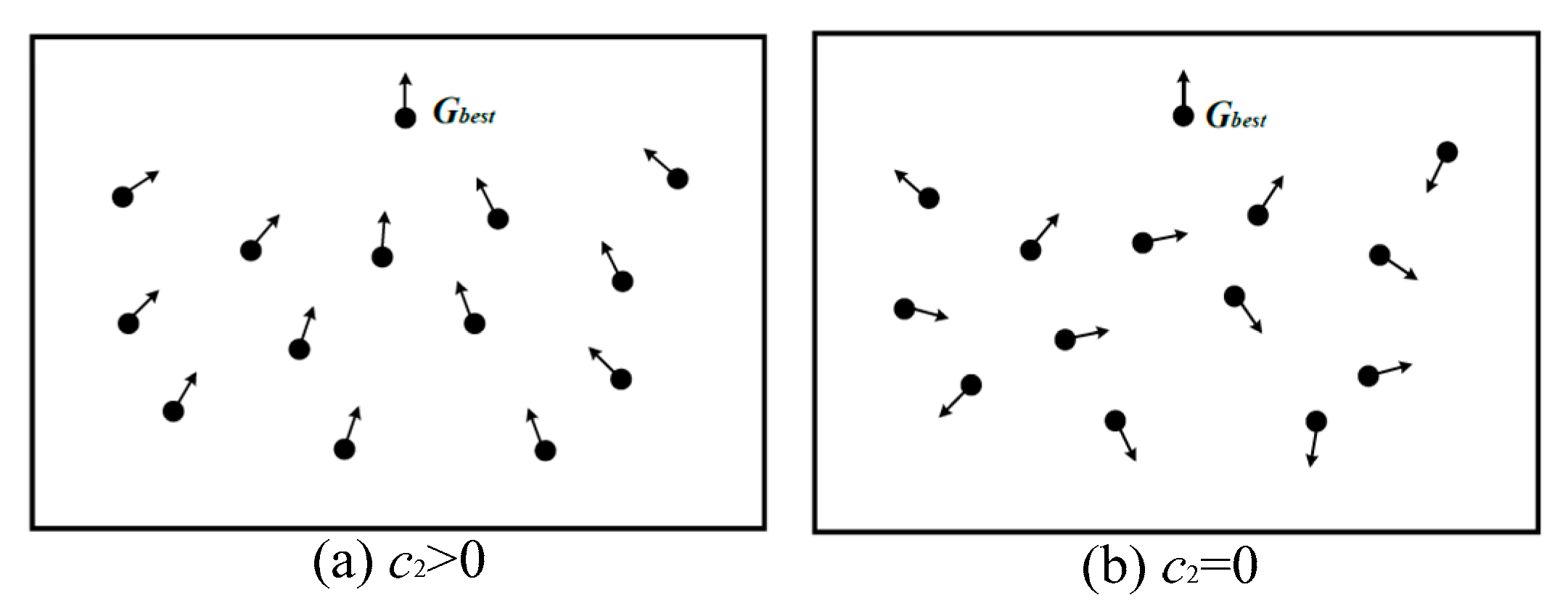
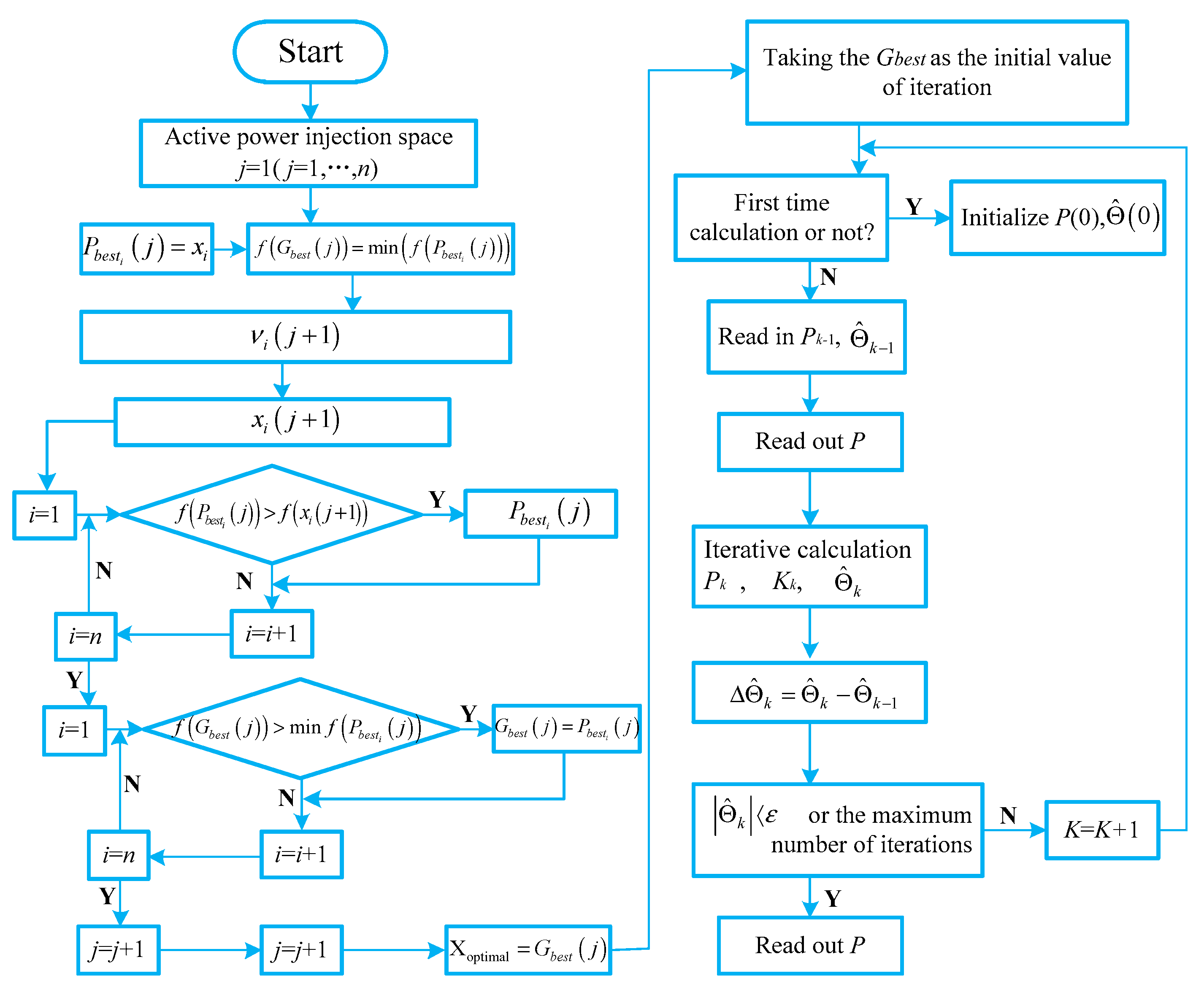
4.1. AVURPSO Algorithm
4.2. Recursive Least Square (RLS) Method
4.3. The AVURPSO-RLS Parameter Identification
5. Case Study
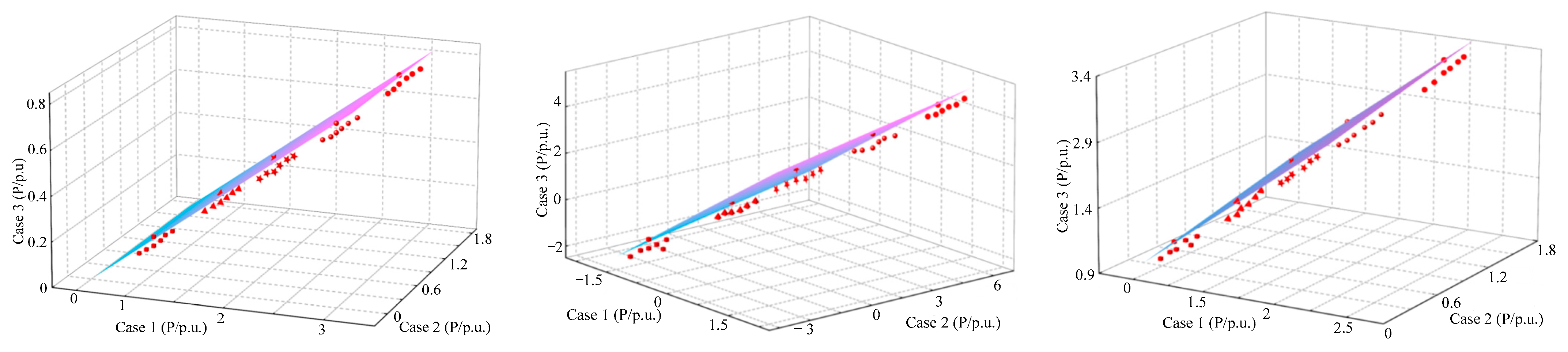
5.1. Time Domain Simulation of DSSR
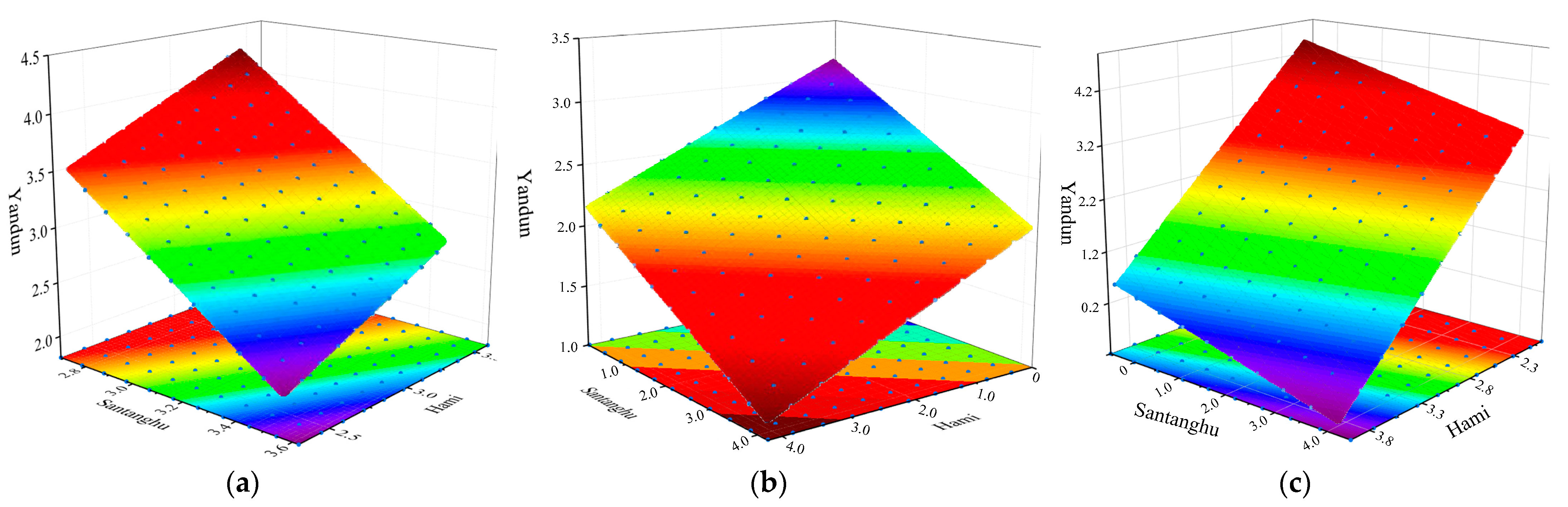
- (1)
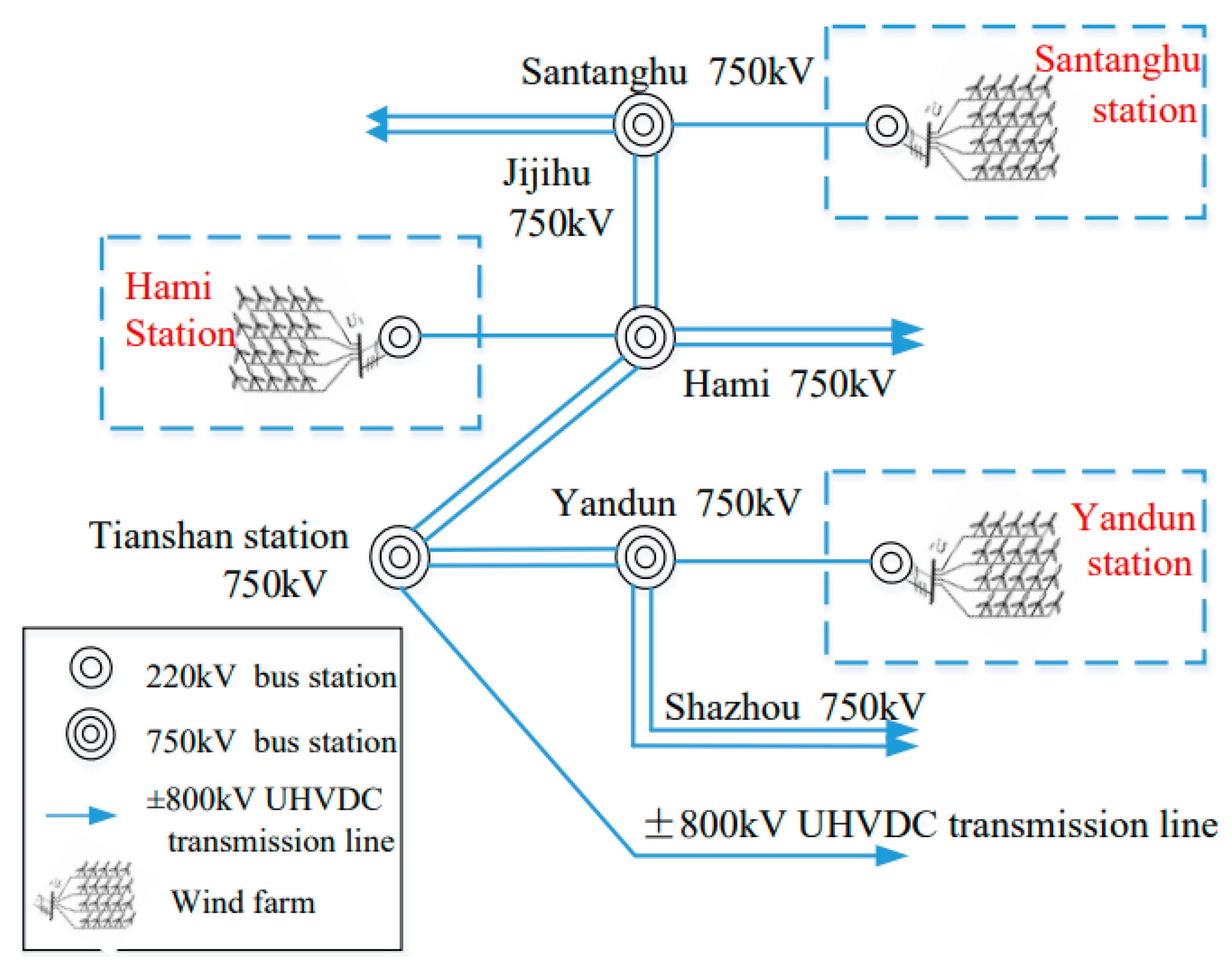
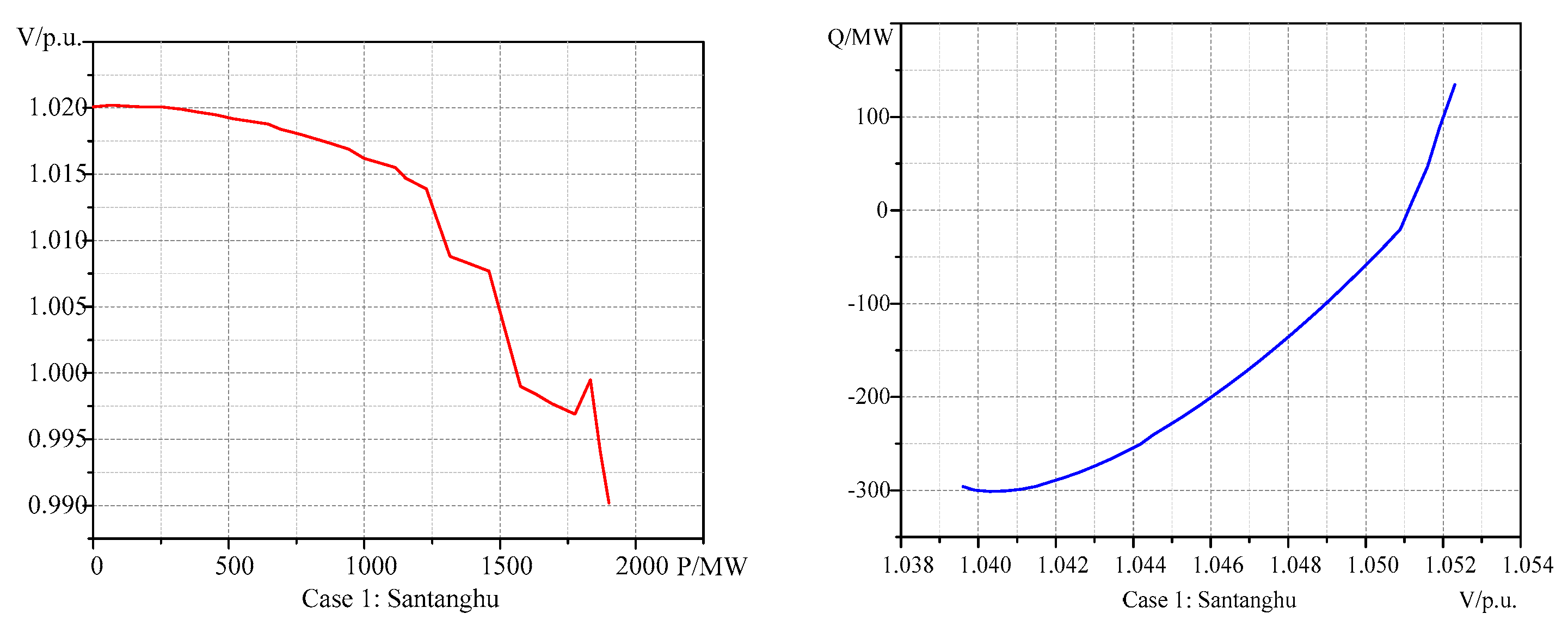
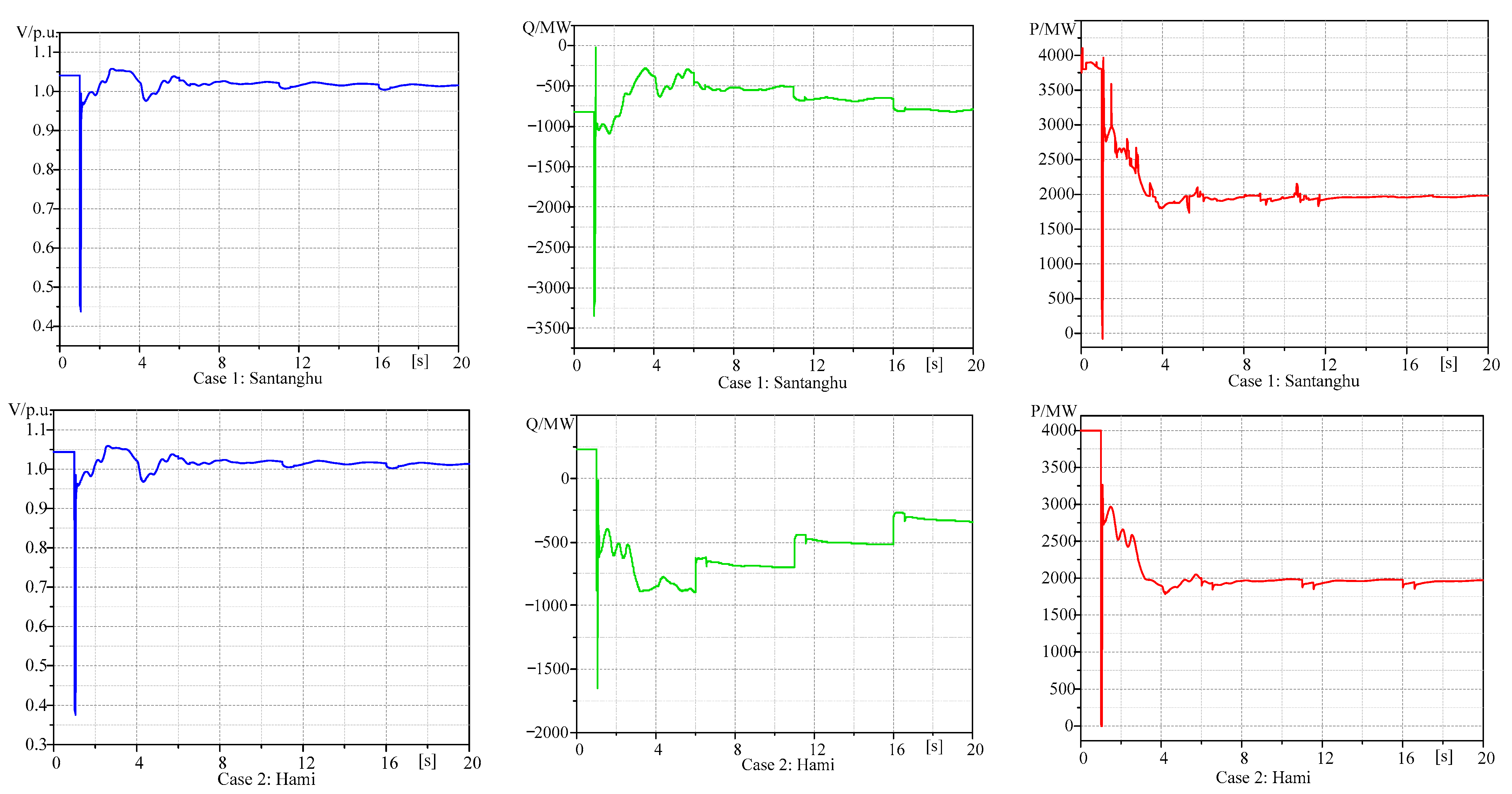
- Case 1: Santanghu station encompasses six wind farms and uses 220 kV wires to link the wind farms to its 750 kV station.
- (2)
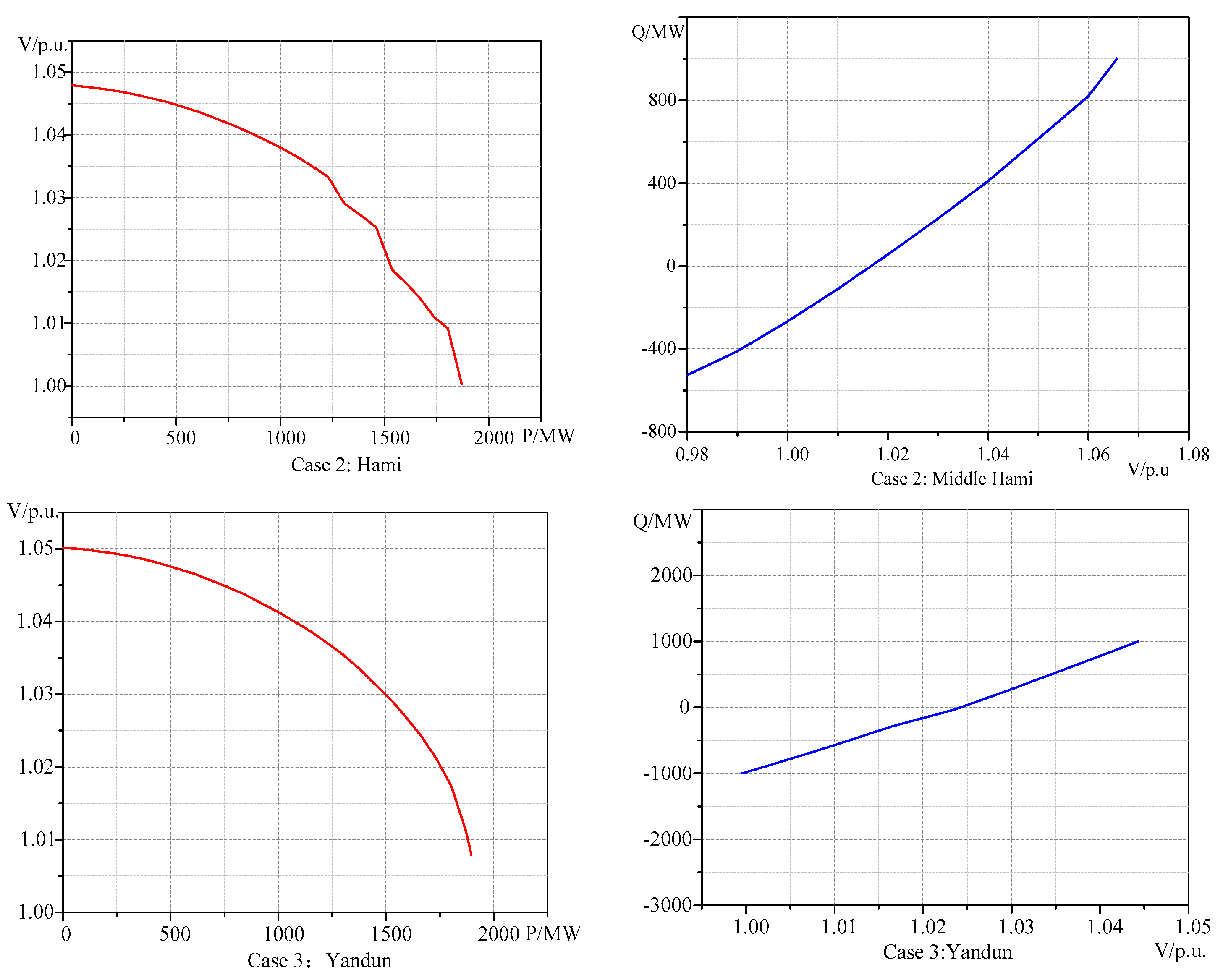
- Case 2: Three major wind farms (220 kV) are linked to the 750 kV central Hami station through three (220 kV) main wind farms.
- (3)
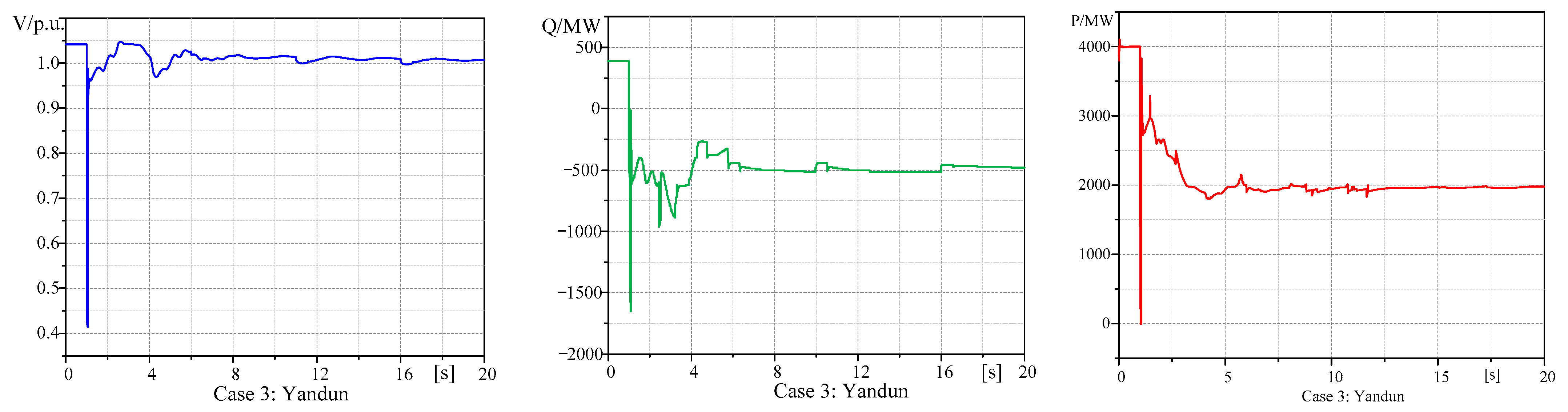
- Case 3: Five (220 kV) primary wind farms are linked to the 750 kV Yandun station. Consequently, this paper discusses the three wind farms affiliated with the Hami Power Grid.
5.2. Sensitivity Analysis of DSSR
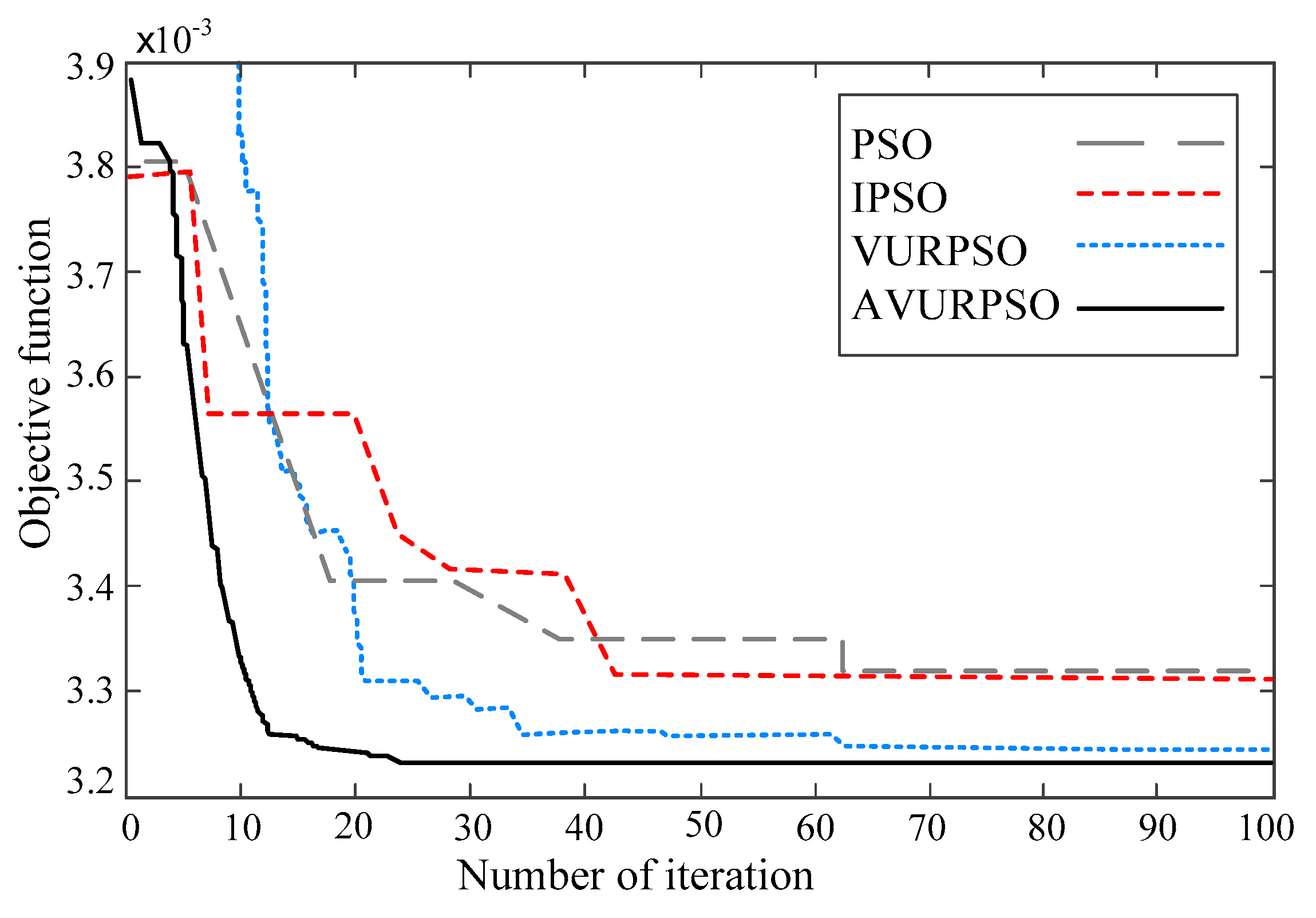
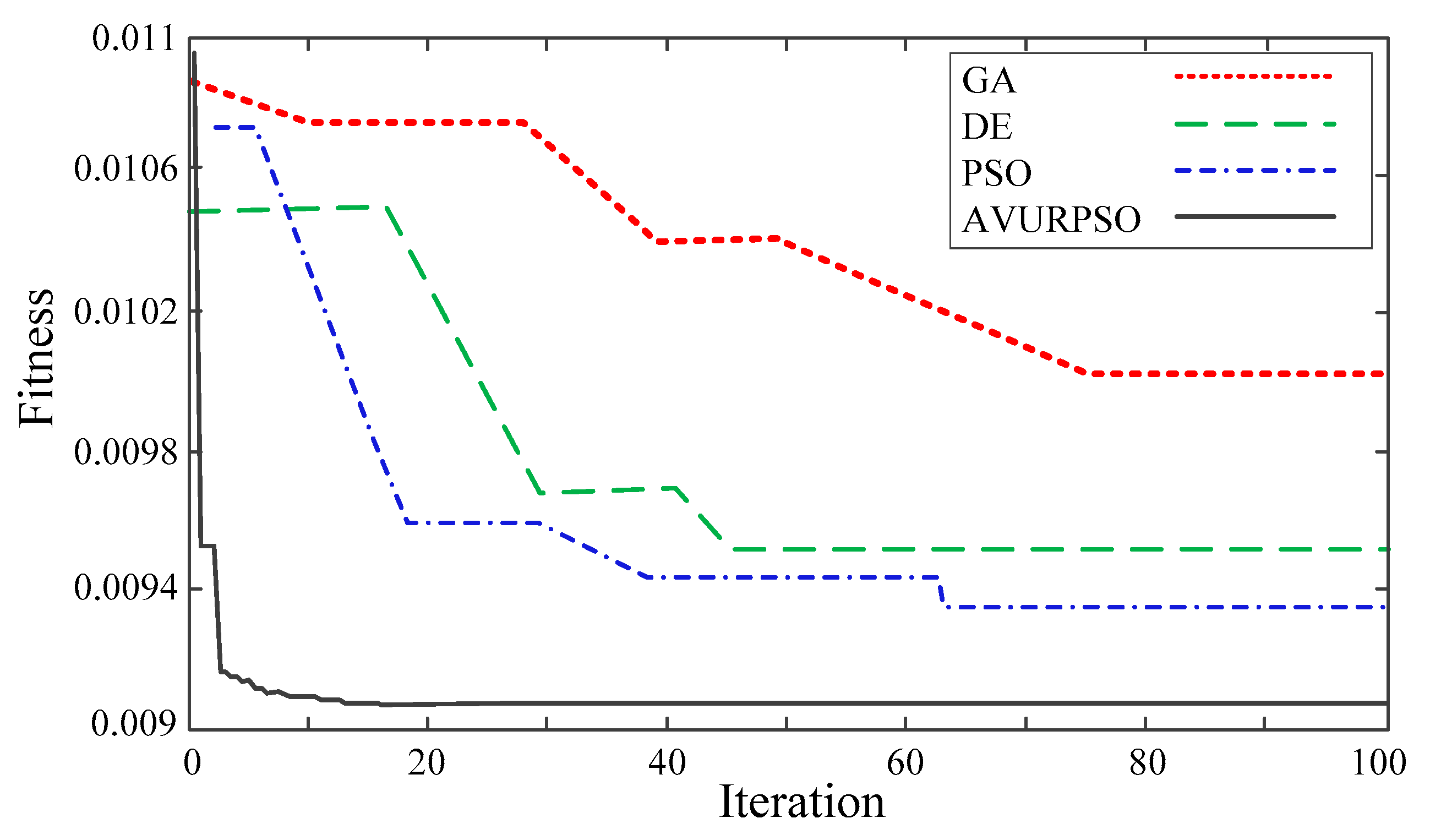
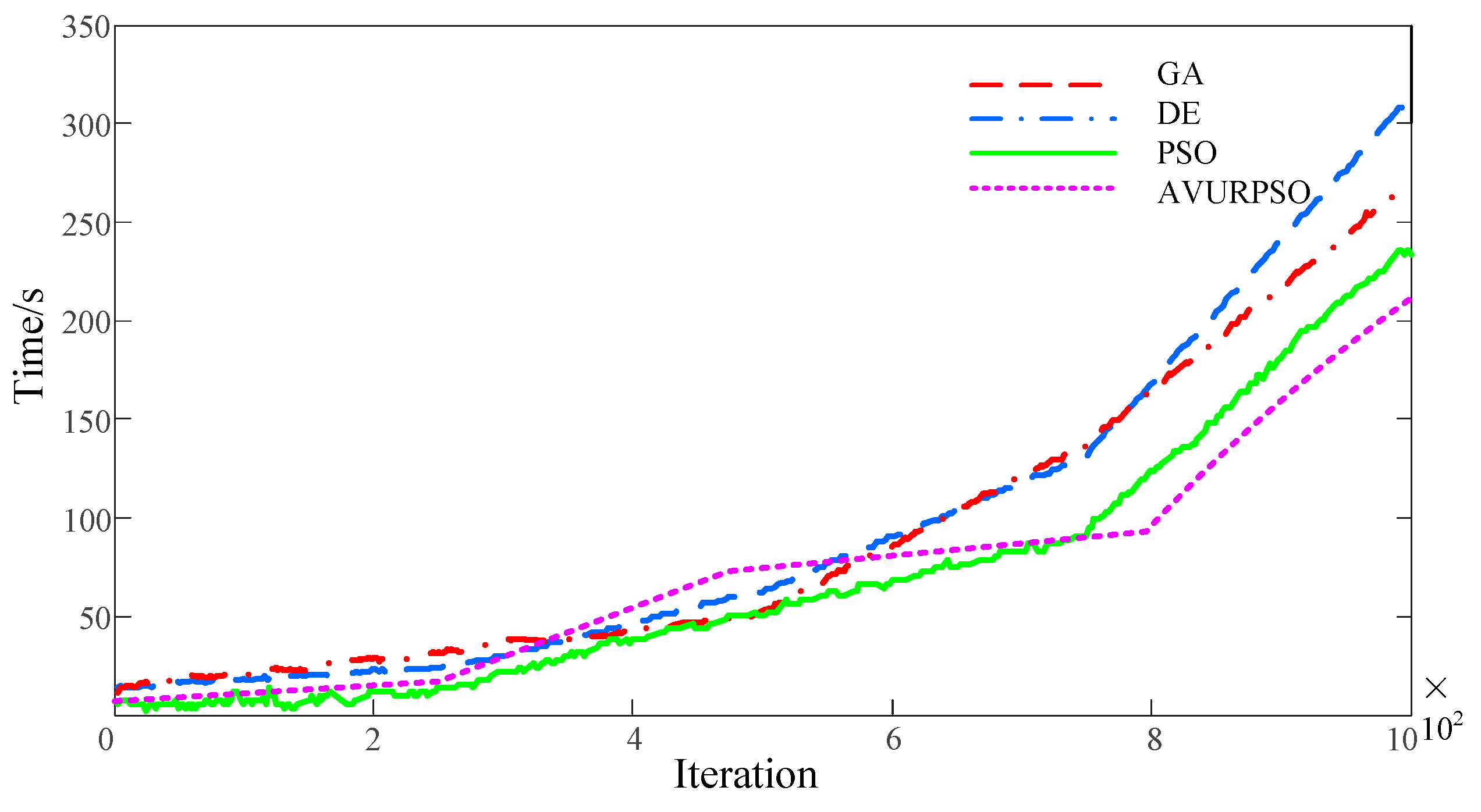
5.3. Comparative Analysis of Algorithms
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, H.; Goh, H.H.; Zhang, D.; Ahmad, T.; Liu, H.; Wang, S.; Li, S.; Liu, T.; Dai, H.; Wu, T. Key technologies for smart energy systems: Recent developments, challenges, and research opportunities in the context of carbon neutrality. J. Clean. Prod. 2022, 331, 129809. [Google Scholar] [CrossRef]
- You, Y.; Yi, L. Energy industry Carbon neutrality transition path: Corpus-based AHP-DEMATEL system modelling. Energy Rep. 2022, 8, 25–39. [Google Scholar] [CrossRef]
- Shabani, H.R.; Kalantar, M. Real-time transient stability detection in the power system with high penetration of DFIG-based wind farms using transient energy function. Int. J. Elect. Power Energy Syst. 2021, 133, 107319. [Google Scholar] [CrossRef]
- Boričić, A.; Torres, J.L.R.; Popov, M. Fundamental study on the influence of dynamic load and distributed energy resources on power system short-term voltage stability. Int. J. Elect. Power Energy Syst. 2021, 131, 107141. [Google Scholar] [CrossRef]
- Adetokun, B.B.; Muriithi, C.M.; Ojo, J.O. Voltage stability assessment and enhancement of power grid with increasing wind energy penetration. Int. J. Elect. Power Energy Syst. 2020, 120, 105988. [Google Scholar] [CrossRef]
- Wang, J.; Xu, J.; Liao, S.; Sima, L. Coordinated Optimization of Integrated Electricity-Gas Energy System Considering Uncertainty of Renewable Energy Output. Auto. Elect. Power Syst. 2019, 43, 2–9. [Google Scholar]
- Dong, X.; Tang, Y.; Bu, G.; Shen, C.; Song, G.; Wang, Z.; Zhao, B. Confronting problem and challenge of large-scale AC-DC hybrid power grid operation. Proc. Chin. Soc. Electr. Eng. 2019, 39, 3107–3119. [Google Scholar]
- Li, B.; Chao, P.; Li, W.; Xu, S.; Liu, X.; Li, Z. Transient overvoltage calculation method of wind power transmission system via UHVDC. Electr. Mach. Control. 2021, 25, 11–18. [Google Scholar]
- Tu, J.; Zhang, J.; Liu, M.; Yi, J.; He, Q. Study on Wind Turbine Generators Tripping Caused by HVDC Contingencies of Wind-Thermal-Bundled HVDC Transmission Systems. Power Syst. Technol. 2015, 39, 3333–3338. [Google Scholar]
- Wu, Y.; Hu, M.; Liao, M.; Liu, F.; Xu, C. Risk assessment of renewable energy-based island microgrid using the HFLTS-cloud model method. J. Clean. Prod. 2021, 284, 125362. [Google Scholar] [CrossRef]
- Hnyilicza, E.; Lee, S.; Schweppe, F.C. Steady-state security regions: Set-theoretic approach. IEEE Trans. Circuits Syst. 1982, 29, 703–711. [Google Scholar]
- Jarjis, J.; Galiana, F.D. Quantitative analysis of steady state stability in power networks. IEEE Trans. Power Appar. Syst. 1981, 1, 318–326. [Google Scholar] [CrossRef]
- Phillipe, V.G.; Saraiva, J.T. State-of-the-art of transmission expansion planning: A survey from restructuring to renewable and distributed electricity markets. Int. J. Elect. Power Energy Syst. 2019, 111, 411–424. [Google Scholar]
- Maihemuti, S.; Wang, W.; Wang, H.; Wu, J. Voltage Security Operation Region Calculation Based on Improved Particle Swarm Optimization and Recursive Least Square Hybrid Algorithm. J. Mod. Power Syst. Clean Energy 2021, 9, 138–147. [Google Scholar] [CrossRef]
- Lin, W.; Jiang, H.; Yang, Z. Time-line security regions in high dimension for renewable accommodations. arXiv 2022, arXiv:2201.01019. [Google Scholar]
- Zeng, Y.; Yu, Y. A practical direct method for determining dynamic security regions of electrical power systems. Proc. Int. Conf. Power Syst. Tech. 2002, 2, 1270–1274. [Google Scholar]
- Xue, A.; Wu, F.F.; Lu, Q.; Mei, S. Power System Dynamic Security Region and Its Approximations. IEEE Trans. Circ. Syst. 2006, 53, 2849–2859. [Google Scholar] [CrossRef]
- Yu, Y.; Liu, Y.; Qin, C.; Yang, T. Theory and Method of Power System Integrated Security Region Irrelevant to Operation States: An Introduction. Engineering 2020, 6, 754–777. [Google Scholar] [CrossRef]
- Zhang, Q.; Zheng, H.; Wang, J.; Liu, X.; Qu, Y.; Bie, Z. A method for calculating static voltage stability margin of power system based on aq bus. Power Syst. Technol. 2019, 43, 714–721. [Google Scholar]
- Xia, S.; Bai, X.; Chen, S.; Guo, Z.; Xu, Y. Solving for dynamic security region based on Taylor series trajectory sensitivity. Electr. Power Autom. Equip. 2018, 38, 157–164. [Google Scholar]
- Pourbehzadi, M.; Niknam, T.; Aghaei, J.; Mokryani, G.; Shafie-Khah, M.; Catalão, J.P.S. Optimal operation of hybrid AC/DC microgrids under uncertainty of renewable energy resources: A comprehensive review. Int. J. Elect. Power Energy Syst. 2019, 109, 139–159. [Google Scholar] [CrossRef]
- Javadian, S.; Haghifam, M.-R.; Firoozabad, M.F.; Bathaee, S. Analysis of protection system’s risk in distribution networks with DG. Int. J. Electr. Power Energy Syst. 2013, 44, 688–695. [Google Scholar] [CrossRef]
- Yu, Y.; Luan, W. Practical dynamic security region of power system. Proc. CSEE 1990, 13, 14–22. [Google Scholar]
- Yu, Y.; Lin, J. Practical analytic expression of power system dynamic security region’s boundary. J. Tianjin Univ. 1997, 30, 1–8. [Google Scholar]
- Zeng, Y.; Fan, J.C.; Yu, Y.X. Practical dynamic security regions of bulk power system. Auto. Elec. Power Syst. 2001, 25, 6–10. [Google Scholar]
- Min, L.; Yu, Y.X.; Lee, S.; Pei, T. Identification method of Instability modes and its application in dynamic security region. Auto. Electr. Power Syst. 2004, 28, 28–32. [Google Scholar]
- Feng, Z.; Yu, Y.; Zeng, Y. An Intercept method for determining practical dynamic security regions of power systems. Auto. Electr. Power Syst. 2006, 30, 18–22. [Google Scholar]
- Zeng, Y.; Yu, Y.X.; Jia, H.J. Computing practical dynamic security region by technology of power sensitivity analysis. J. Tianjin Univ. 2006, 39, 76–82. [Google Scholar]
- Qin, C.; Liu, Y.L.; Yu, Y.X. Dynamic security region of power systems with double fed induction generator. Trans. China Electro. Tech. Soc. 2015, 30, 157–163. [Google Scholar]
- Hou, K.F.; Yu, Y.X.; Lee, S.T.; Pei, Z. Reduction and reconstruction of power system practical dynamic security region. Auto. Electr. Power Syst. 2004, 28, 16–21. [Google Scholar]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach; Pearson Education Limited: London, UK, 2016. [Google Scholar]
- Movahedi, A.; Niasar, A.H.; Gharehpetian, G.B. Optimal real-time operation strategy for microgrid: An ADP-based stochastic nonlinear optimization approach. IEEE Trans Sustain. Energy 2019, 10, 931–942. [Google Scholar]
- Movahedi, A.; Niasar, A.H.; Gharehpetian, G.B. Designing SSSC, TCSC, and STATCOM controllers using AVURPSO, GSA, and GA for transient stability improvement of a multi-machine power system with PV and wind farms. Int. J. Electr. Power Energy Syst. 2019, 106, 455–466. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Parameters | Value |
|---|---|---|
| GA | crossover rate | 0.9 |
| mutation rate | 0.01 | |
| inertia weight ω | −0.3236 | |
| PSO | particle optimal weight, c1 | −0.1136 |
| group optimal weight, c2 | 3.9789 | |
| DE | mutation factor, F | 0.5 |
| crossover factor, CR | 0.9 |
| Algorithms | Cases | Optimal Value | Worst Value | Average Value | Standard Deviation |
|---|---|---|---|---|---|
| GA | Case 1 | 0.000552 | 0.00099 | 0.000419 | 0.000238 |
| Case 2 | 0.0011 | 0.00258 | 0.259 | 0.0817 | |
| Case 3 | 0.000424 | 0.000113 | 0.000456 | 0.000339 | |
| DE | Case 1 | 0.0311 | 0.0436 | 0.0153 | 0.0132 |
| Case 2 | −9.6601 | −9.6134 | −9.6501 | 0.0182 | |
| Case 3 | −9.1140 | −7.8072 | −8.4778 | 0.3489 | |
| PSO | Case 1 | 0.7210 | 7.3193 | 3.3746 | 2.3257 |
| Case 2 | 0.0101 | 0.000278 | 0.031 | 0.875 | |
| Case 3 | 0.0012 | 0.3378 | 0.1059 | 0.1330 | |
| AVURPSO | Case 1 | 0.0335 | 0.000203 | 0.326 | 0.0146 |
| Case 2 | 0.000487 | 0.0019 | 0.000378 | 0.000316 | |
| Case 3 | 0.00463 | 0.00346 | 0.031 | 0.0028 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maihemuti, S.; Wang, W.; Wu, J.; Wang, H.; Muhedaner, M.; Zhu, Q. New Energy Power System Dynamic Security and Stability Region Calculation Based on AVURPSO-RLS Hybrid Algorithm. Processes 2023, 11, 1269. https://doi.org/10.3390/pr11041269
Maihemuti S, Wang W, Wu J, Wang H, Muhedaner M, Zhu Q. New Energy Power System Dynamic Security and Stability Region Calculation Based on AVURPSO-RLS Hybrid Algorithm. Processes. 2023; 11(4):1269. https://doi.org/10.3390/pr11041269
Chicago/Turabian StyleMaihemuti, Saniye, Weiqing Wang, Jiahui Wu, Haiyun Wang, Muladi Muhedaner, and Qing Zhu. 2023. "New Energy Power System Dynamic Security and Stability Region Calculation Based on AVURPSO-RLS Hybrid Algorithm" Processes 11, no. 4: 1269. https://doi.org/10.3390/pr11041269
APA StyleMaihemuti, S., Wang, W., Wu, J., Wang, H., Muhedaner, M., & Zhu, Q. (2023). New Energy Power System Dynamic Security and Stability Region Calculation Based on AVURPSO-RLS Hybrid Algorithm. Processes, 11(4), 1269. https://doi.org/10.3390/pr11041269