1. Introduction
One of the most important resources for humans on earth is water, which becomes easily polluted due to human activities. An adequate wastewater treatment may clean the water to be used again, making this cycle sustainable. Urban drainage systems (UDS) collect and transport both wastewater resulting from human activity and rainfall to treatment facilities avoiding discharges into the environment, forming a combined urban drainage system (CUDS). These systems mainly consist of storage tanks and connecting pipes, constituting a sewer network. After heavy rain events, the wastewater obtained can overflow the network and pollute the environment.
Obtaining mathematical models of the process that enable the design of different control algorithms has been the main research in this field. The operating objectives are essentially to avoid losses of wastewater from the network due to overflows in the storage reservoirs and at the inlet to the WWTP and to maximize this inlet flow, decreasing the economic cost of operation [
1,
2]. Moreover, reducing the pollutant mass escaping from the network may be a prior objective, so it is needed to consider the concentration of pollutants in the overflowed water [
3,
4]. Another problem is the “first flush” when abundant precipitation falls after a dry season, provoking a large growth in the concentration of contaminants in the sewer system [
5].
Simulation models must accurately describe the processes that occur in a sewerage system (hydraulic and pollutant mass transport). They must be simple enough to be used for control. The features of the wastewater caught depending on the area (urban or industrial wastewaters with variable concentrations of contaminants) and the rainwater going into the network, as well as the specific period of the year, are considered in these models. In consequence, typical patterns that attempt to represent different situations have been developed [
6]. Some of them are benchmarks for testing control systems of the sewage, such as [
5], and simpler ones can be obtained to be used for advanced control design algorithms. In general, control strategies for UDS [
7] can be off-line controllers, which use static rules, and on-line controllers that use real-time control actions [
8,
9,
10]. Within the first group, RBC (rule-based control) algorithms have been used in [
11,
12], with their main problem being the number of rules when the scale of the system grows. Control systems based on fuzzy logic control (FLC), combining simple rules with an expert system, are applied in [
13,
14,
15,
16]. Within the second group of algorithms, the LQR controller has been used in [
17] to reduce the overflows in the network by using all the available storage volume and emptying the system immediately, if possible. Additionally, genetic algorithms have been used in water quality networks in [
3] and to optimize the control of UDS [
4]. In [
12], evolutionary algorithms (EA) together with self-adaptive strategies get an increase in the quality of the water reaching the rivers, reducing costs. Control algorithms based on population dynamics (PD) have been used in [
18,
19], getting a better use of the sewage capacity and reducing overflows. All the above control strategies are based on sewer network hydraulic models, except in [
20,
21], in which the concentration of wastewater pollutants is considered in the control algorithm. A literature review of modelling and control of sewer systems is presented in [
22].
Related to the structure of the UDS control systems, centralized control is the most used configuration. However, decentralized control using local controllers may be a better solution if the number of actuators is high [
23]. In complex large-scale systems, both levels of control (local and global) are usually considered together and frequently, and there can be one more level of control, becoming a hierarchical structure [
24,
25].
The interaction between the UDS and the WWTP must be considered to improve performance in both systems [
26], but there are only few studies in the literature that tackle both systems together and, mainly, they deal with the performance of the WWTP, using simpler models for the sewage systems [
27,
28]. Considering other control algorithms, in [
29] is used a heuristic-type controller based on rules, and in [
30], another that combines model predictive control (MPC) with RBC strategies.
One of the most popular advanced control strategies is MPC that uses a system model to obtain the control variables values on a future horizon by optimizing a cost function [
31,
32,
33]. The MPC algorithm consists of four main parts: a control-oriented prediction model of the process, a cost function representing the control objective, a group of process constraints, and a minimization problem solved in a receding-horizon way [
31]. Generally, hierarchical control architectures use the MPC to calculate optimal set-points for local controllers. The features of MPC strategies have several advantages for being used in UDS, such as their ability to predict the system’s behavior to future rain events considering delays, constraints, and disturbances. A centralized predictive controller, applied in [
25], has been developed considering a model whose state variables are the levels of the network reservoirs, the manipulated variables are flow rates at the tank outputs, and the measurable disturbances are the collected input flow rates to the system. In this case, the main constraints are given by the maximum capacity of tanks and pipes.
In [
25,
34], an MPC controller has been simulated, obtaining important decreases in floods and overflows. In other cases, MPC algorithms have been applied to UDS by means of non-linear prediction models and both operation costs and overflows have decreased [
35,
36]. Most parts of the control-oriented models in MPCs consider the hydraulic part only. However, in [
20,
37], a dynamic model of concentration of suspended solids (TSS) used for the MPC algorithm to minimize not only the CSO volume, but also the total pollutant mass escaping into the environment, is presented. Moreover, in [
38], a comparison of two optimization methods to minimize overflows is shown: mixed integer (MI) and quadratic program (QP). This analysis concludes that both methods have the same performance, but QP is computationally more efficient than MI.
In the case of large-scale systems, it can be more suitable to split the whole process into smaller subsystems to simplify the application of MPC controller [
9,
39]. Then, local prediction models and cost functions are used, and the exchange of information between subsystems may be considered or not. Distributed model predictive control (DMPC) [
9] is applied when local controllers exchange data to solve their own local problem, in a cooperative and coordinated way. In the literature, there is a wide variety of DMPC algorithms applied to different processes [
40,
41], but only a few deal with water management systems, such as volume control in tanks [
42,
43] and the coordination of drinking water systems [
41,
44]. In addition, no applications to sewer systems based on DMPC algorithms considering the concentrations of pollutants have been developed before, to the knowledge of the authors.
Therefore, the major contribution of this article is the development and application of a practical DMPC algorithm to a UDS, using local linearized models of the process including TSS and fuzzy negotiation among the subsystems [
42,
43]. Moreover, the WWTP is included in the control algorithm as an additional objective which consists of the maximization of the WWTP input flow. The results, obtained from the benchmark described in [
5], have been compared with a centralized MPC and DMPC based in a cooperative game [
45] to validate the utility of the proposed methodology, providing a comprehensive framework for validation including pollutants and other practical issues.
This document begins with an introduction describing the benchmark simulation model and presenting the model used by the control algorithms. In the next section, its sectorization is detailed. This article follows with the exposition of the control objectives. Then, centralized and distributed MPC control strategies are explained, showing the compared results in each case considering or not considering TSS. Finally, the conclusions of this work are presented.
3. Sectorization of the System Model
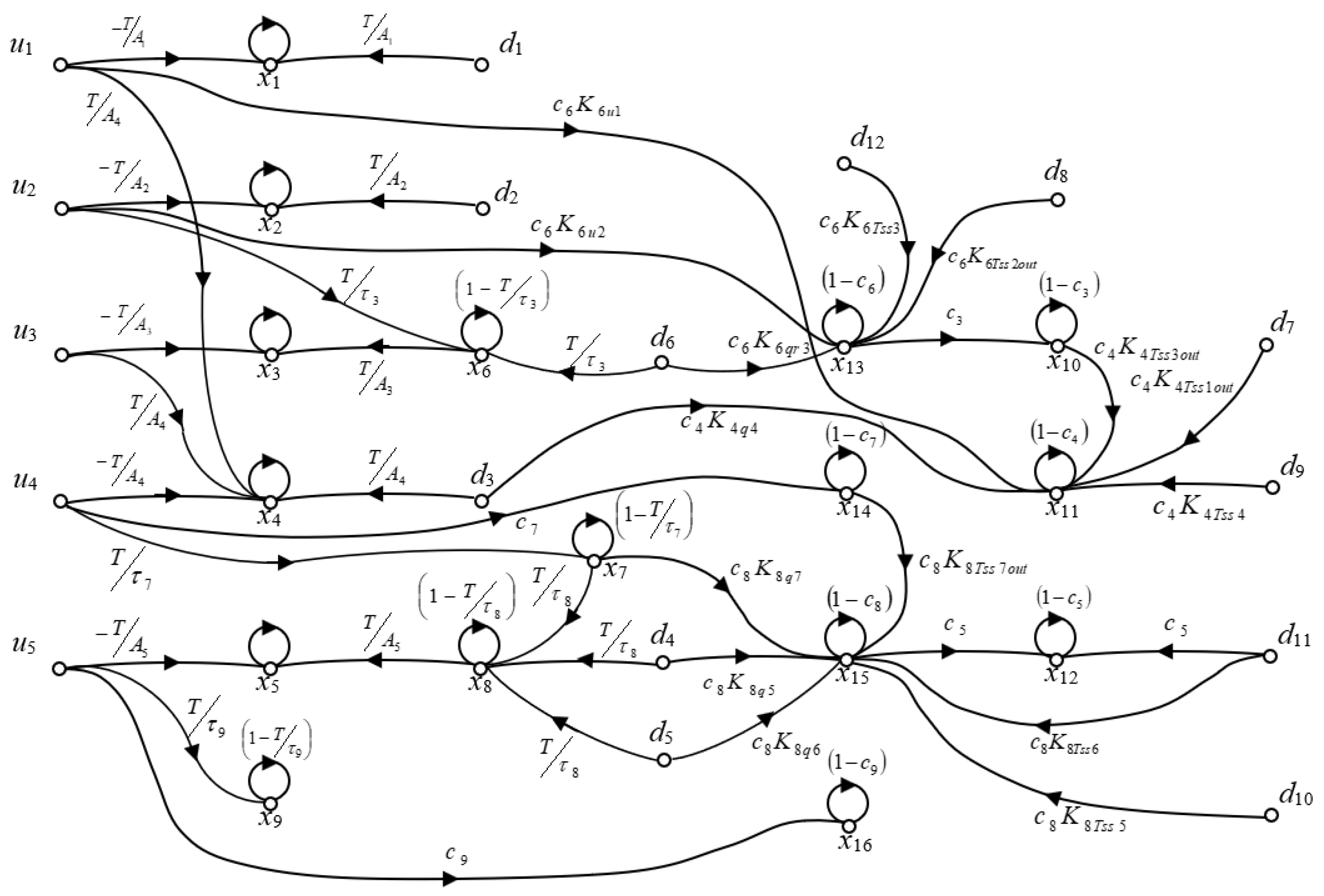
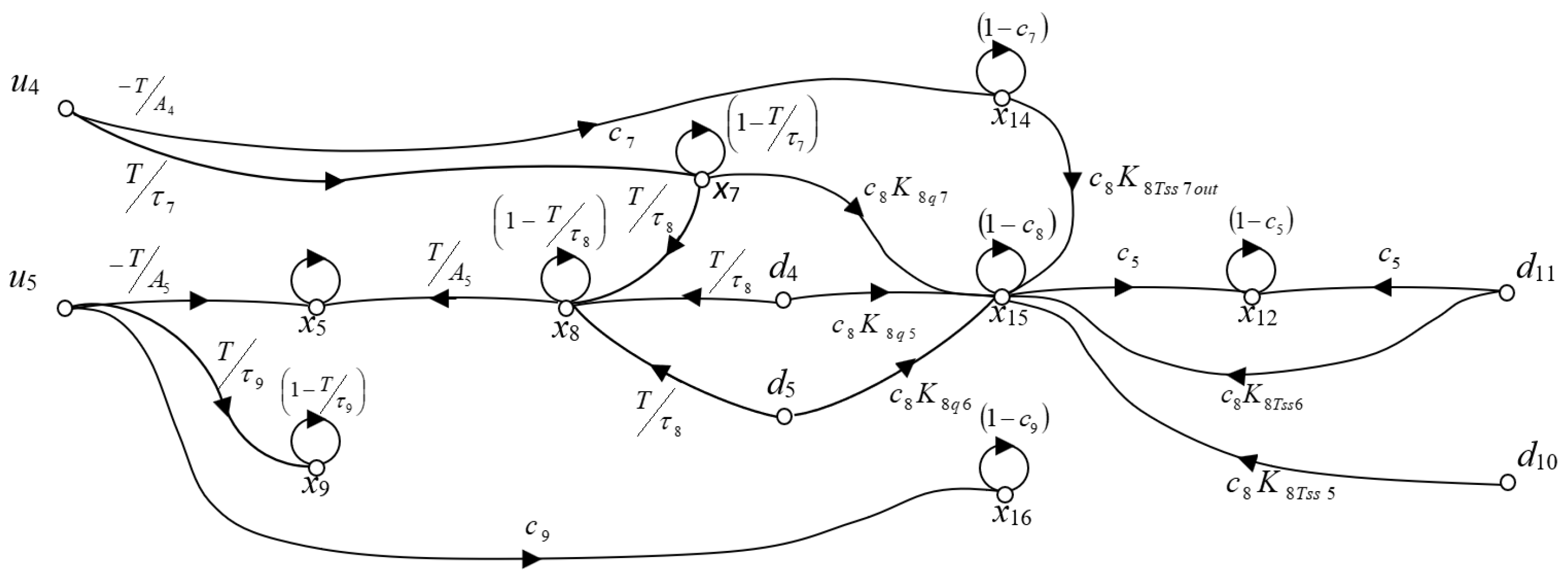
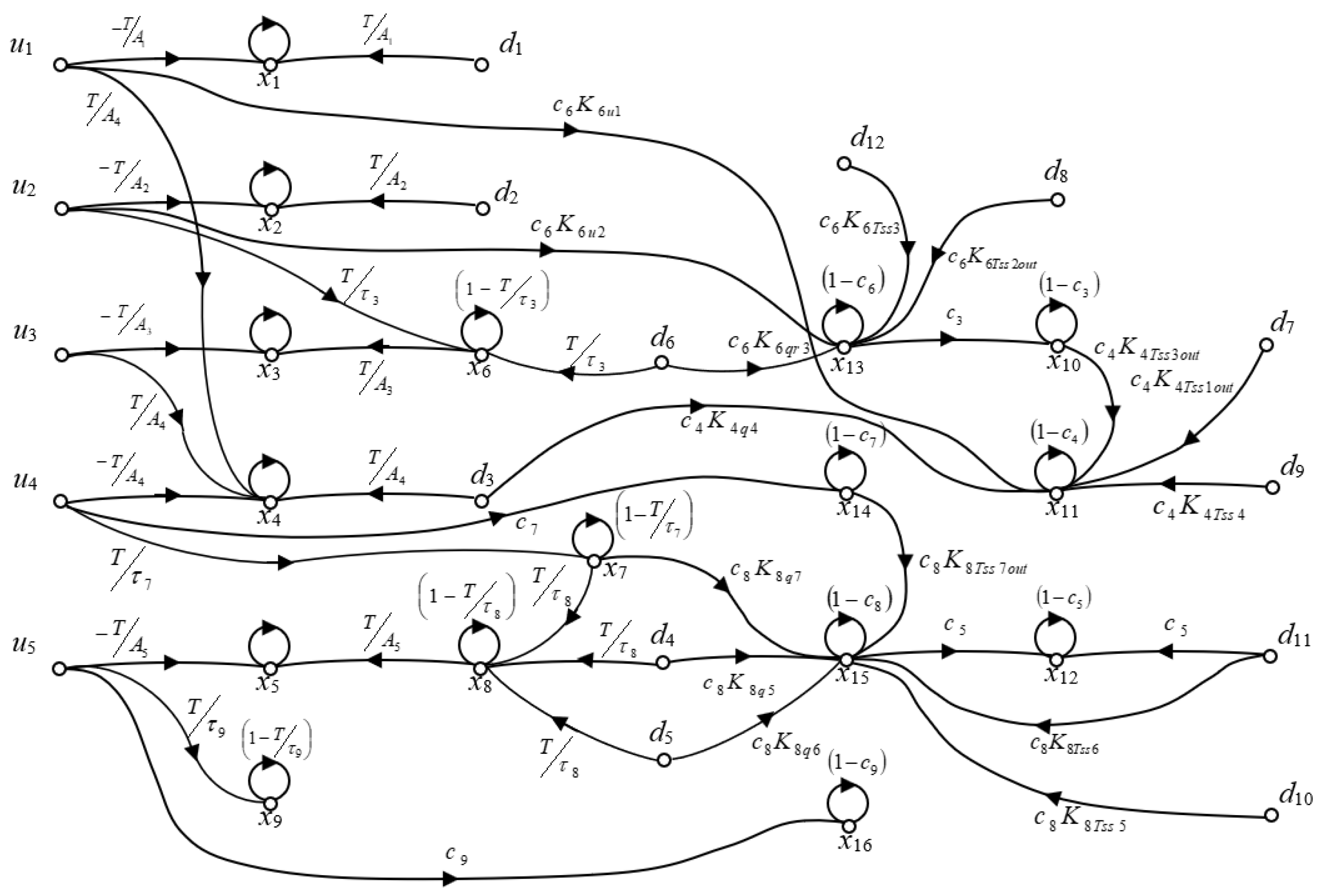
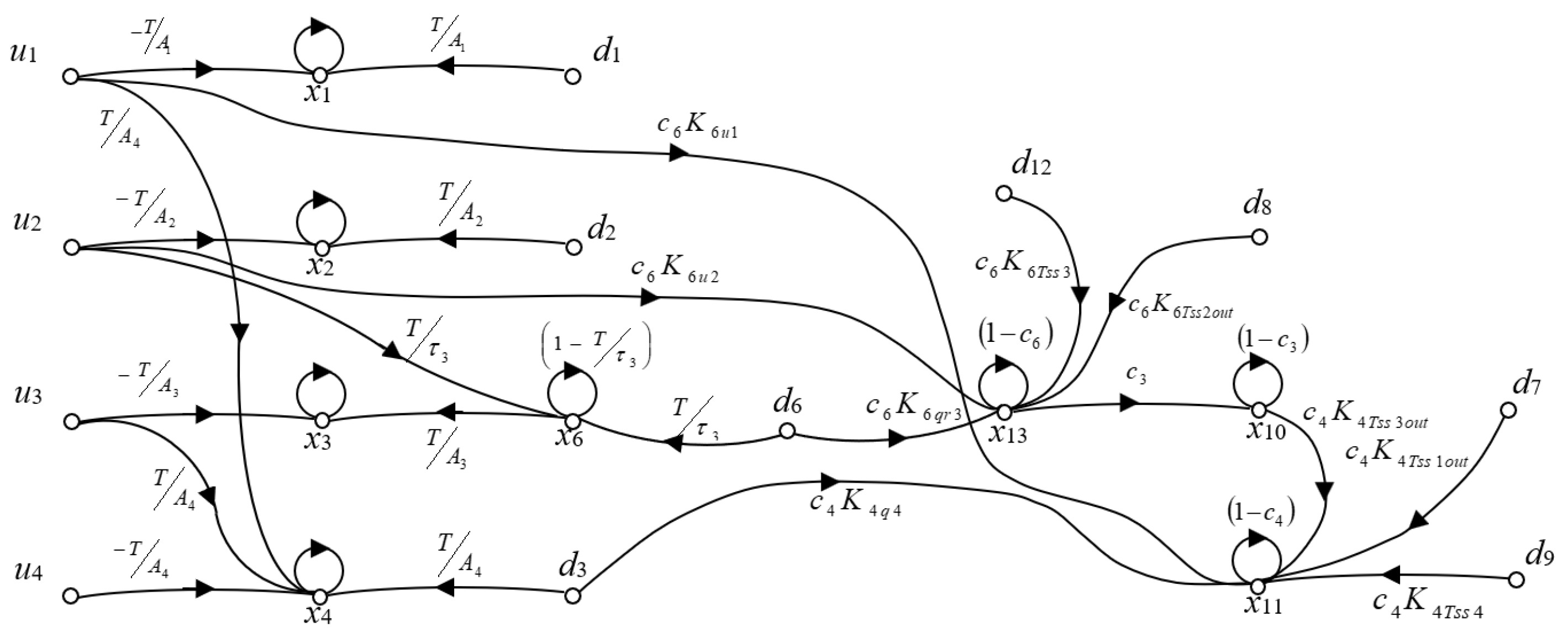
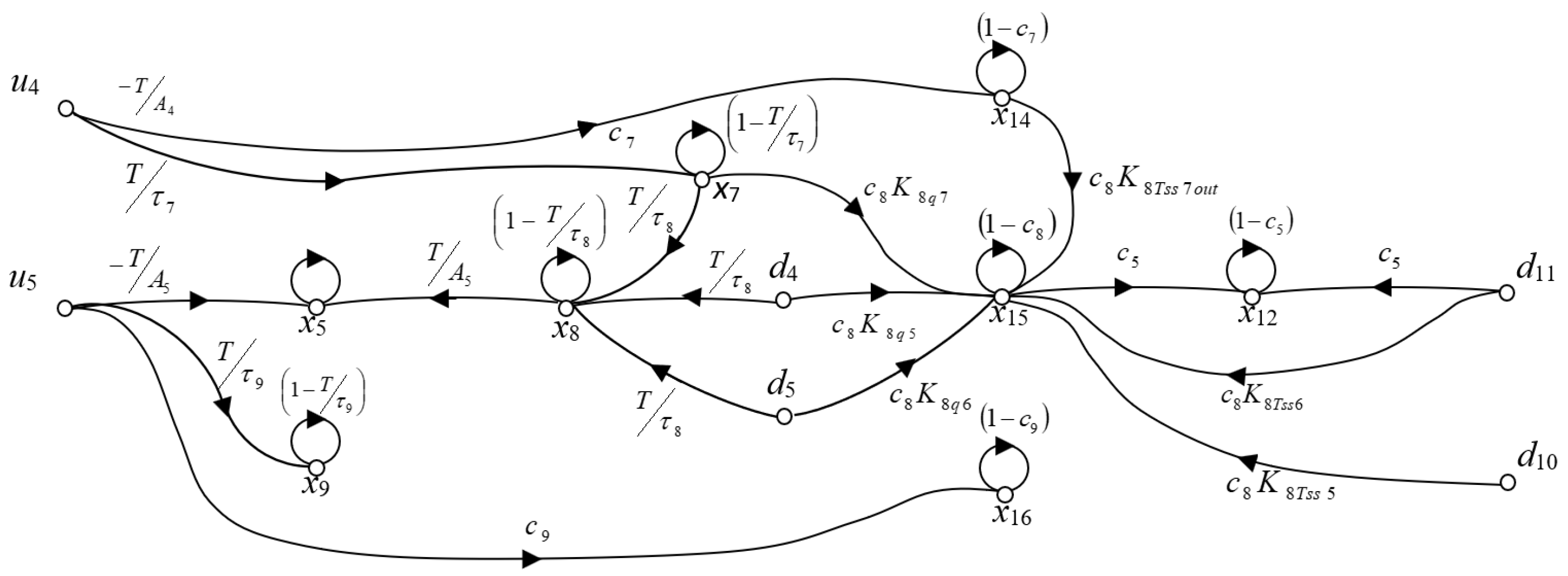
To apply control methodologies to large-scale systems, it is usually necessary to divide the whole system into smaller subsystems. To find the best way to divide the system into smaller ones, a structural analysis has been carried out, so that the subsystems are controllable, reducing their degree of coupling [
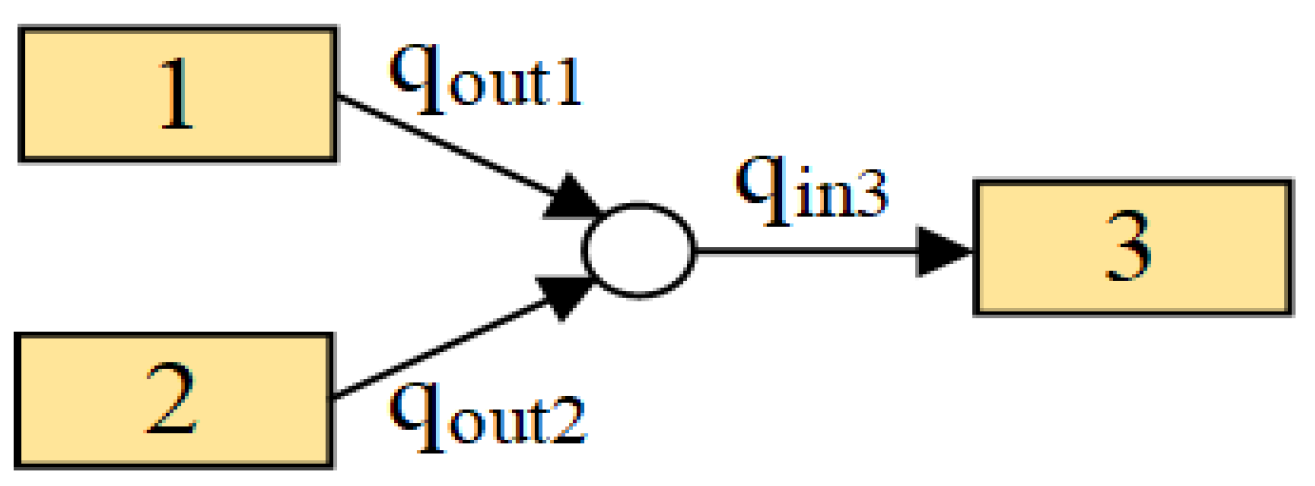
47]. The direct graph of the system represents the relationships between the different process variables and helps to obtain the best method to split the entire system into subsystems with minimal coupling, holding their reachability [
47]. To achieve this objective, the reachability from the input has been tested from the direct graph of the system obtained by applying the same method as in [
46]. This is shown in
Appendix B of the document, as well as the system sectorization.
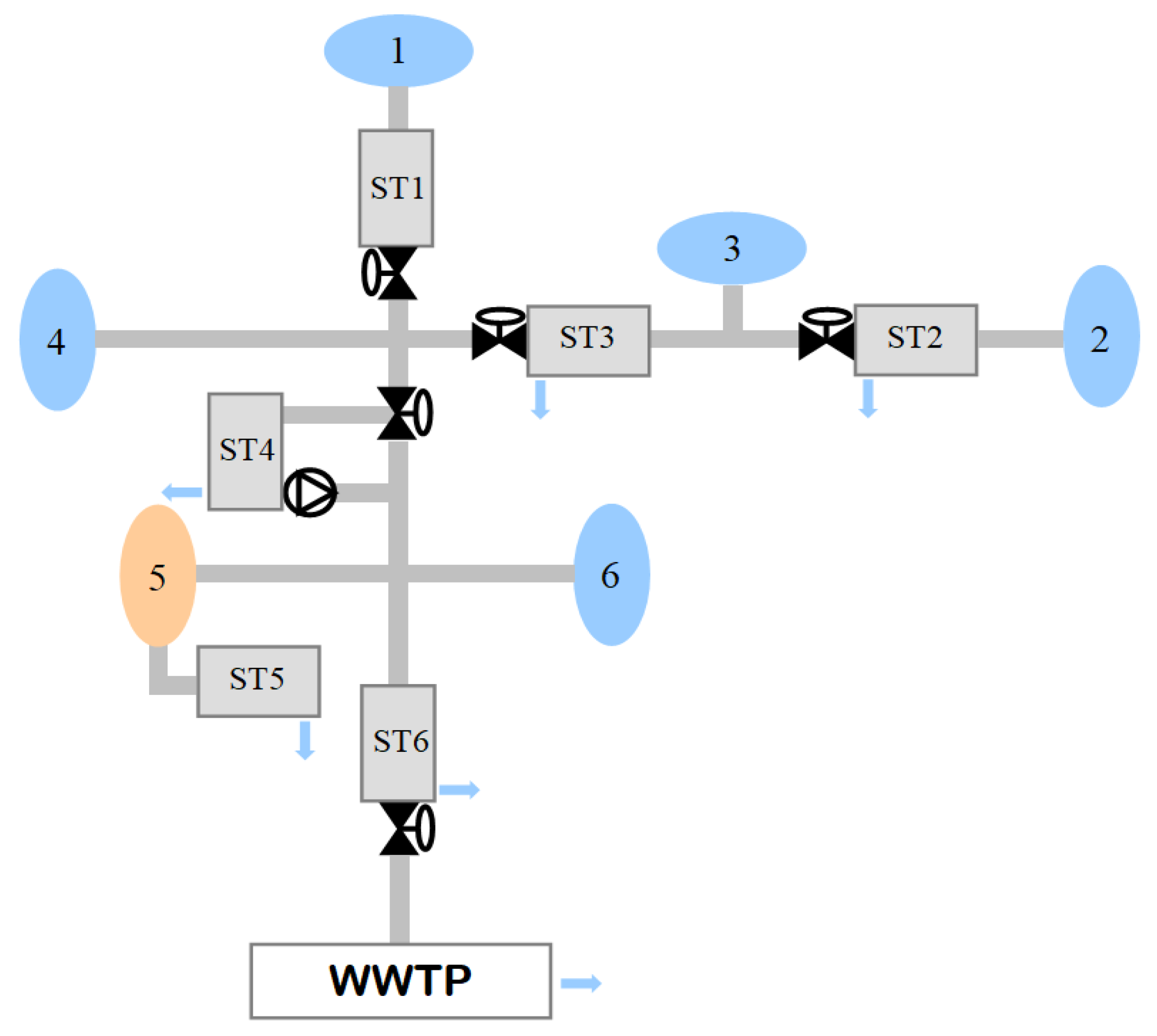
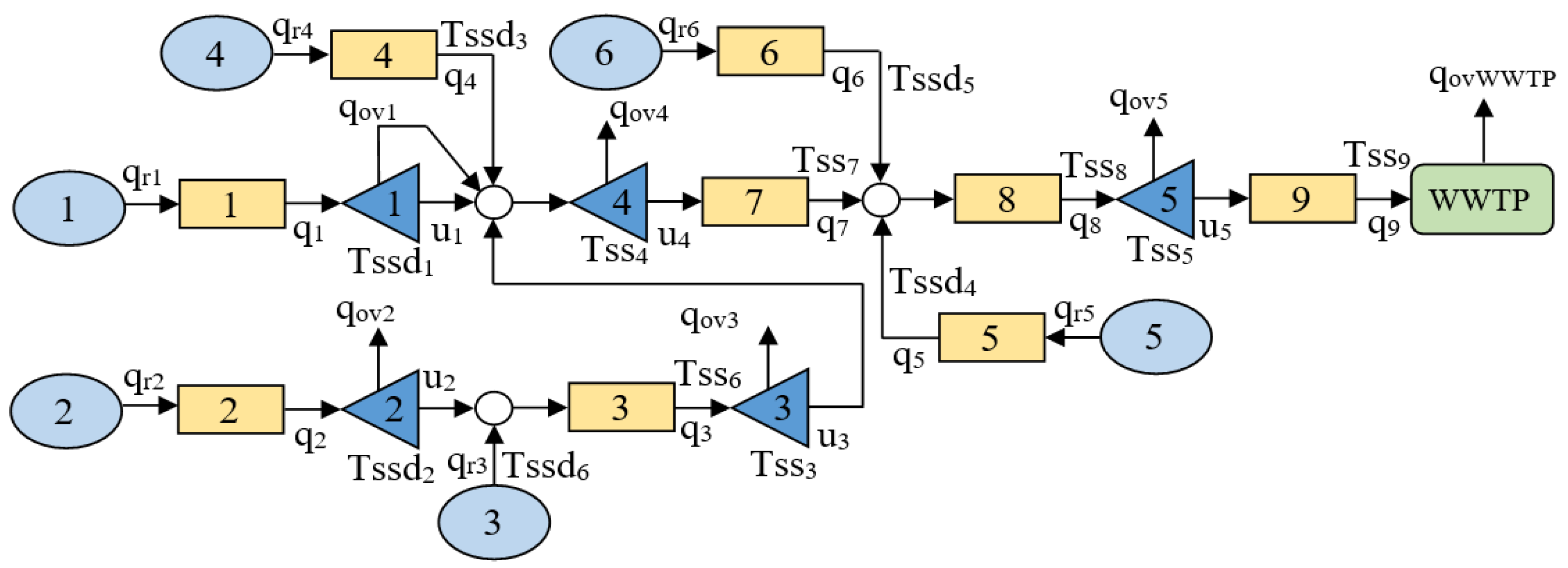
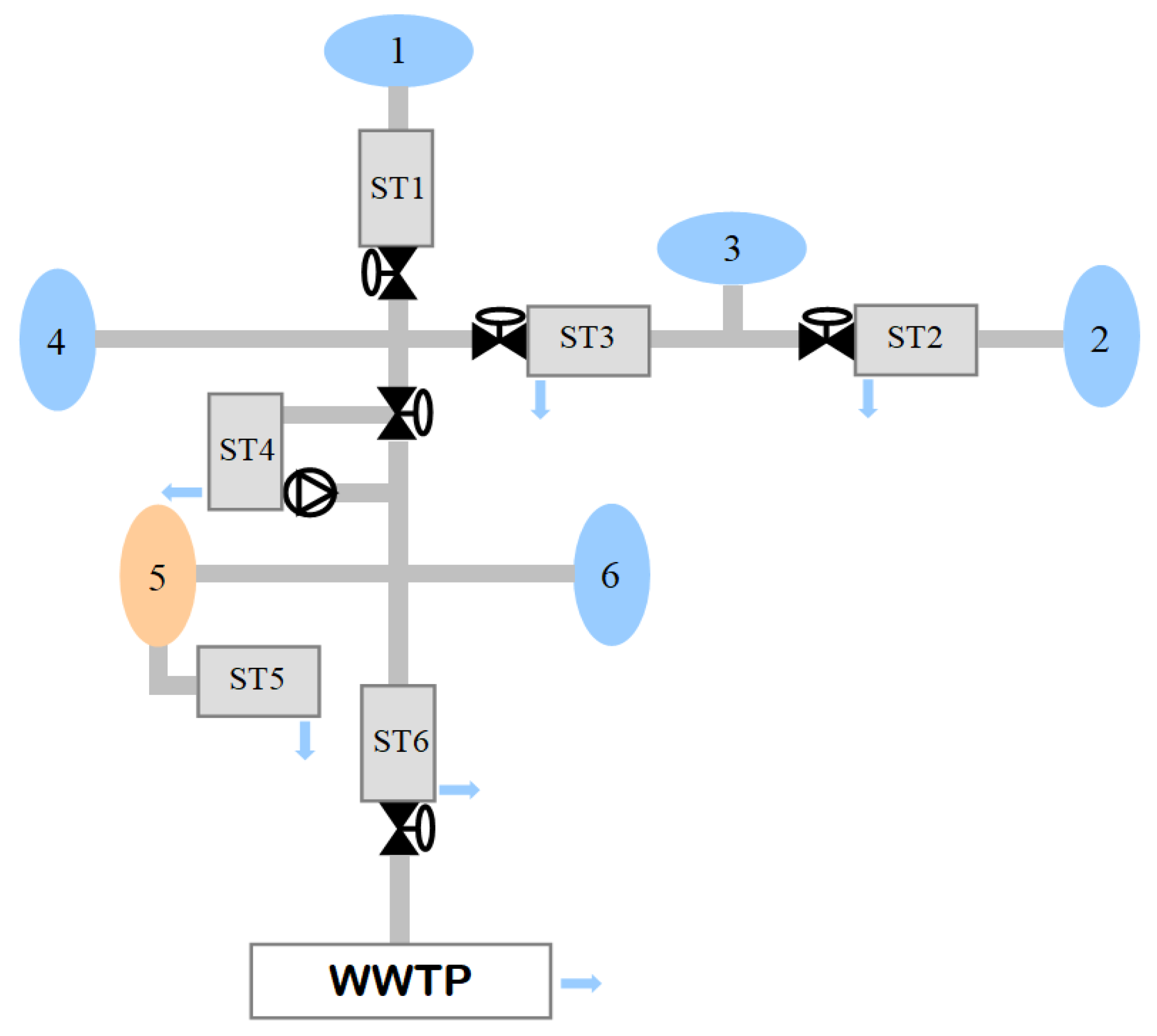
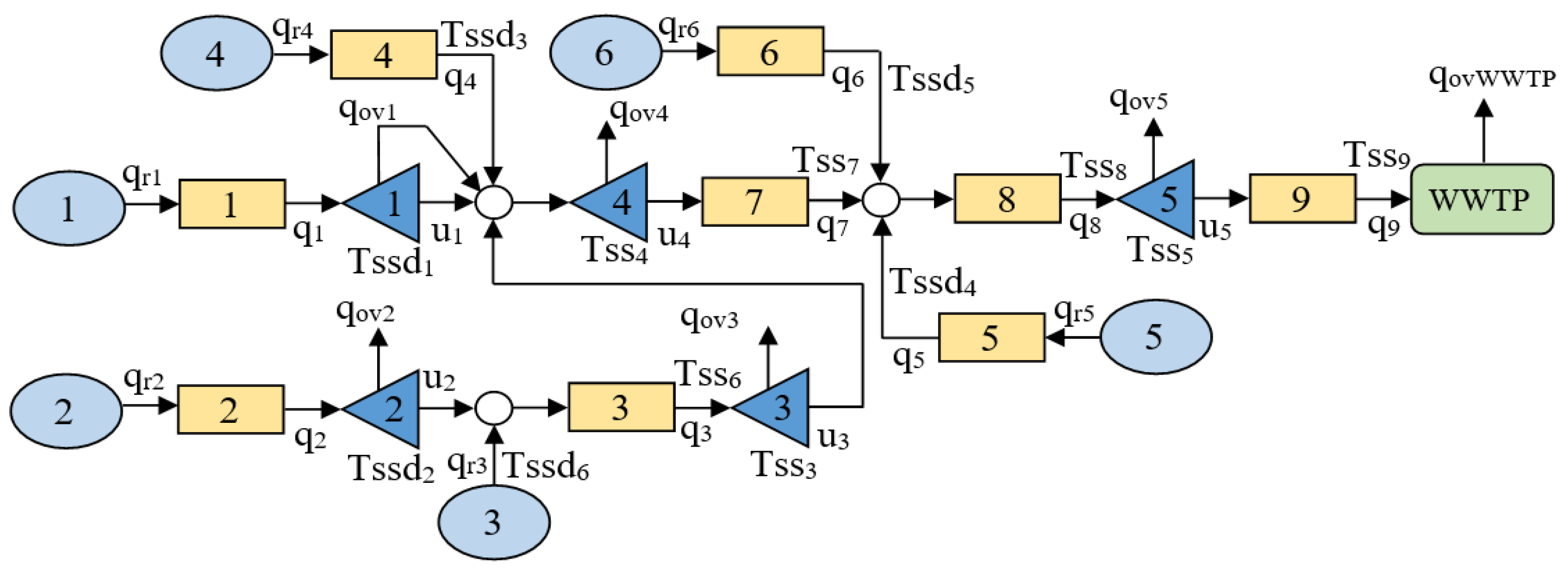
For this benchmark, two subsystems are considered: the first includes tanks 1 to 4, links 1 to 4, and catchment areas 1 to 4; and the second, tank 5, links 5 to 9, and catchment areas 5 and 6. To use the distributed MPC exposed in
Section 6, the state space local models of each subsystem are obtained as follows, considering the coupling input
u4 to belong to subsystem 1:
Properly choosing the rows and columns of A and B from the matrices (8), the matrices A1, Bp11, Bp12, A2, Bp21, and Bp22 are obtained. Moreover, due to the system’s configuration, Bp21 only has non-zero elements in the last column, and Bp12, Bd12, and Bd21 are null.
4. Control Objectives
The control objectives considered in this system are to keep the WWTP input flow close to its nominal value, taking advantage of its capacity, to reduce the mass of contaminant escaping from the sewage, avoiding overflows in the deposits and at the input of the WWTP, and to optimize operating costs. To get the exposed goal, the set-points of the outlet flow rates of the deposits (control variables) are obtained to reduce the difference between the nominal flow rate and its current value at the inlet to the WWTP. Moreover, the volume of wastewater is distributed among all the reservoirs in the sewerage according to their capacity, which is obtained by optimizing the difference between the wastewater level of each deposit and a dynamically calculated set-point level to get that objective [
48]. The effects of the disturbances (collected flows at the catchment areas) will be reduced by the proportional distribution of the wastewater stored in the reservoirs, minimizing the overflows. The control objectives can be expressed as a cost function that includes the partial goals previously exposed [
46,
49]:
where
N is the prediction horizon of the MPC presented in 5 and
M is the number of objectives considered,
φj is a partial goal, and
wj is the weight associated to each partial objective
φj, with
j = 1, …,
M.
The partial objectives included in the control problem considered are shown below:
where
is the total filled volume in the sewerage at instant
k,
vi is a factor that represents the weight of the deposit capacity
i in the total available storage volume in the network,
represents the concentration of suspended solids of each tank
i at the instant
k, and
is the weighted mean concentration of suspended solids at the instant
k. The weight
qii(
k) allows for the overflows’ penalization, growing quadratically with the associated overflow, and also considers if the pollutant concentration
is higher or lower than the average
to penalize more or less the mass of pollutant overflowed. Factors
fi and
αi penalize even more overflows in some deposits. Weights
qii(k) and
qjj(k) are tuning parameters included as diagonal elements in the
Q(
k) matrix below.
- 2.
Maximum usage and minimum overflow at the WWTP influent:
where
QWWTP is the inlet flow to the treatment plant (state x
9) at instant
k and
QWWTPmax is its nominal value.
- 3.
Control efforts minimization:
where
uiref are the output flows to keep the reference level in a deposit, calculated by Bernoulli’s law, as explained in
Section 5.2. Weights
rii are tuning parameters included as diagonal elements in the
R matrix below.
The global control system has a hierarchical structure. The level set-points are generated for each variable at the upper level to get the cited control objectives. Thus, the MPC controller solves a constrained optimization problem, obtaining the set-points used by local controllers, optimizing the usage of WWTP and operating costs. Then, local controllers apply the control signals to the system [
48,
50].
7. Results and Discussion
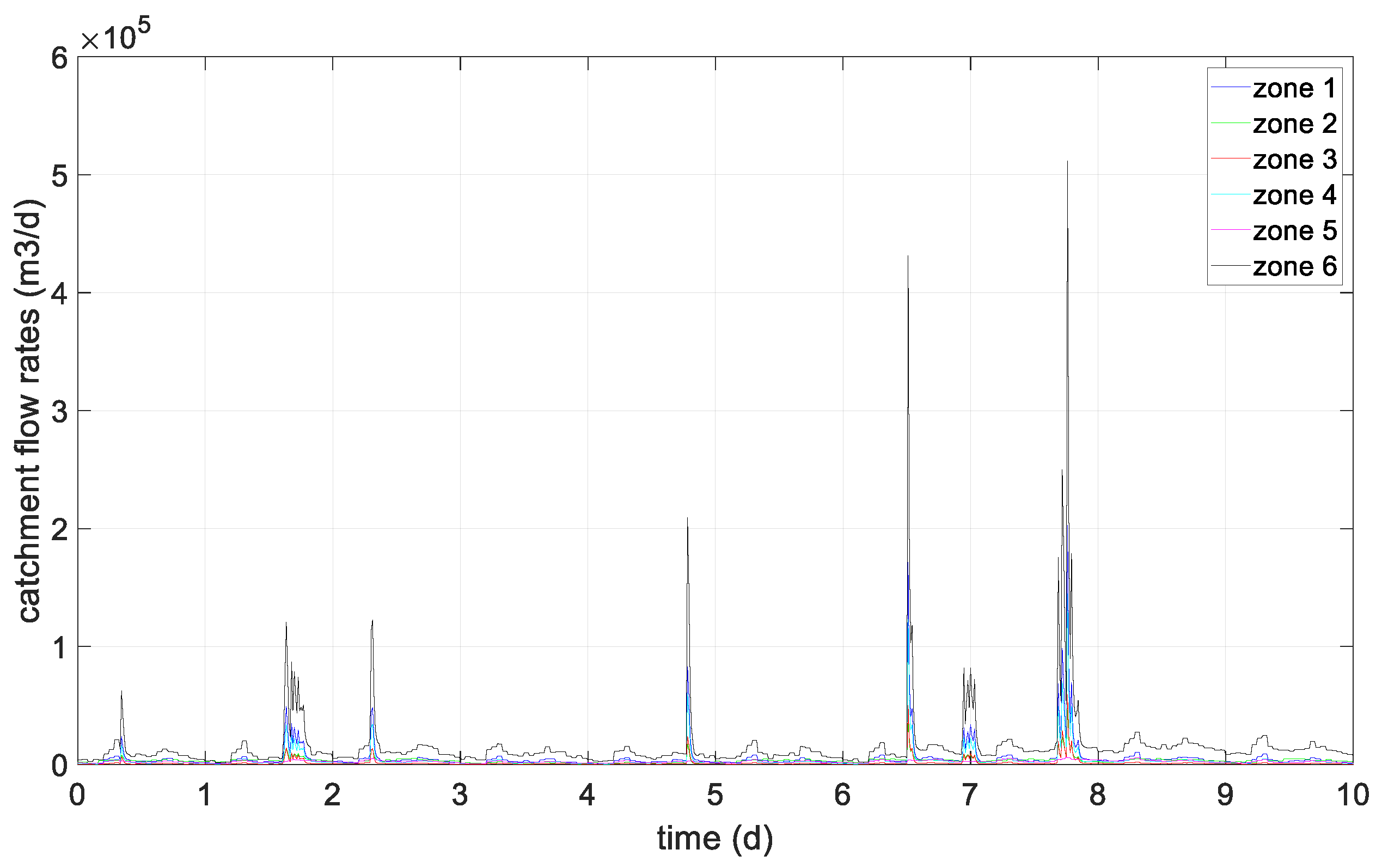
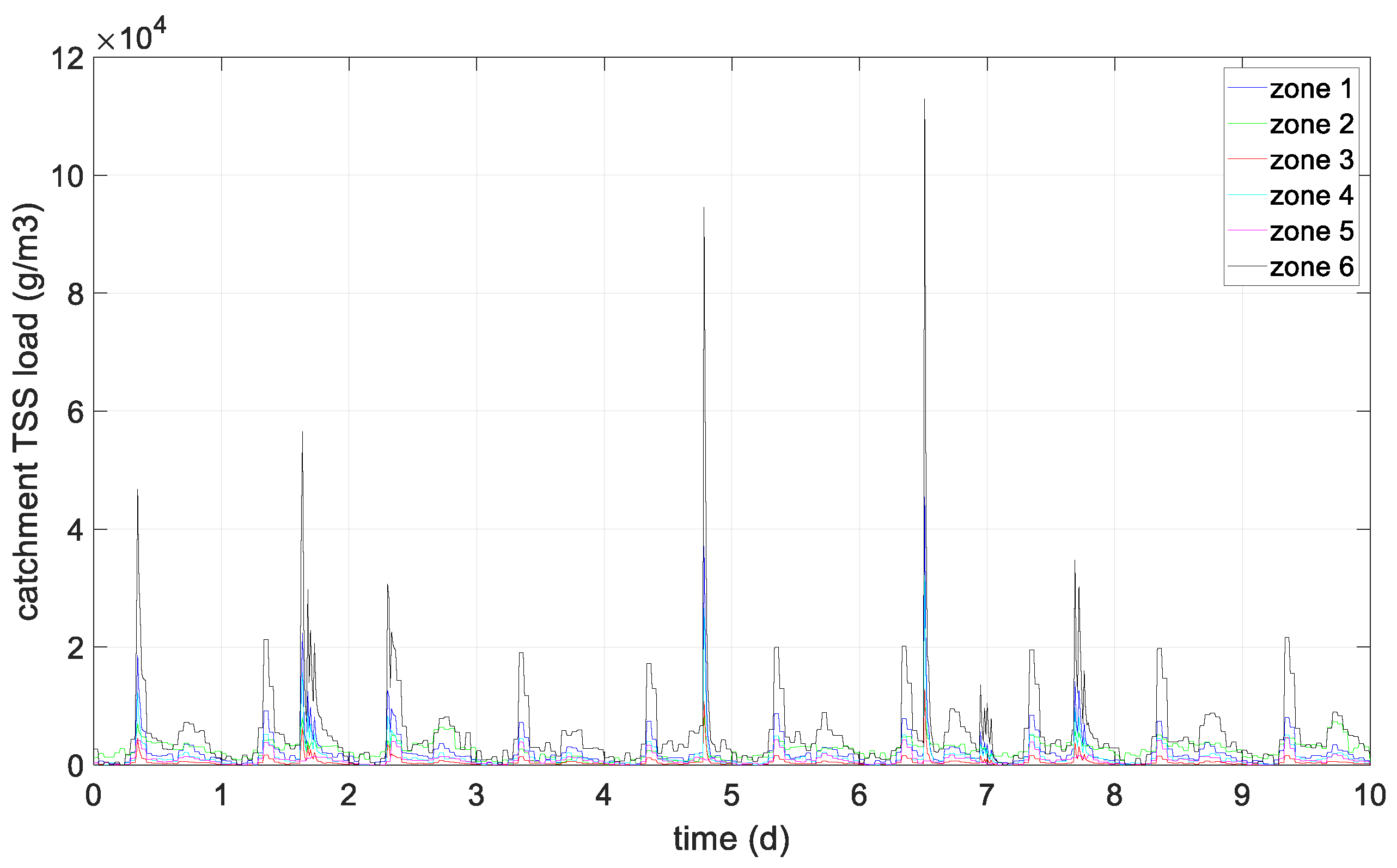
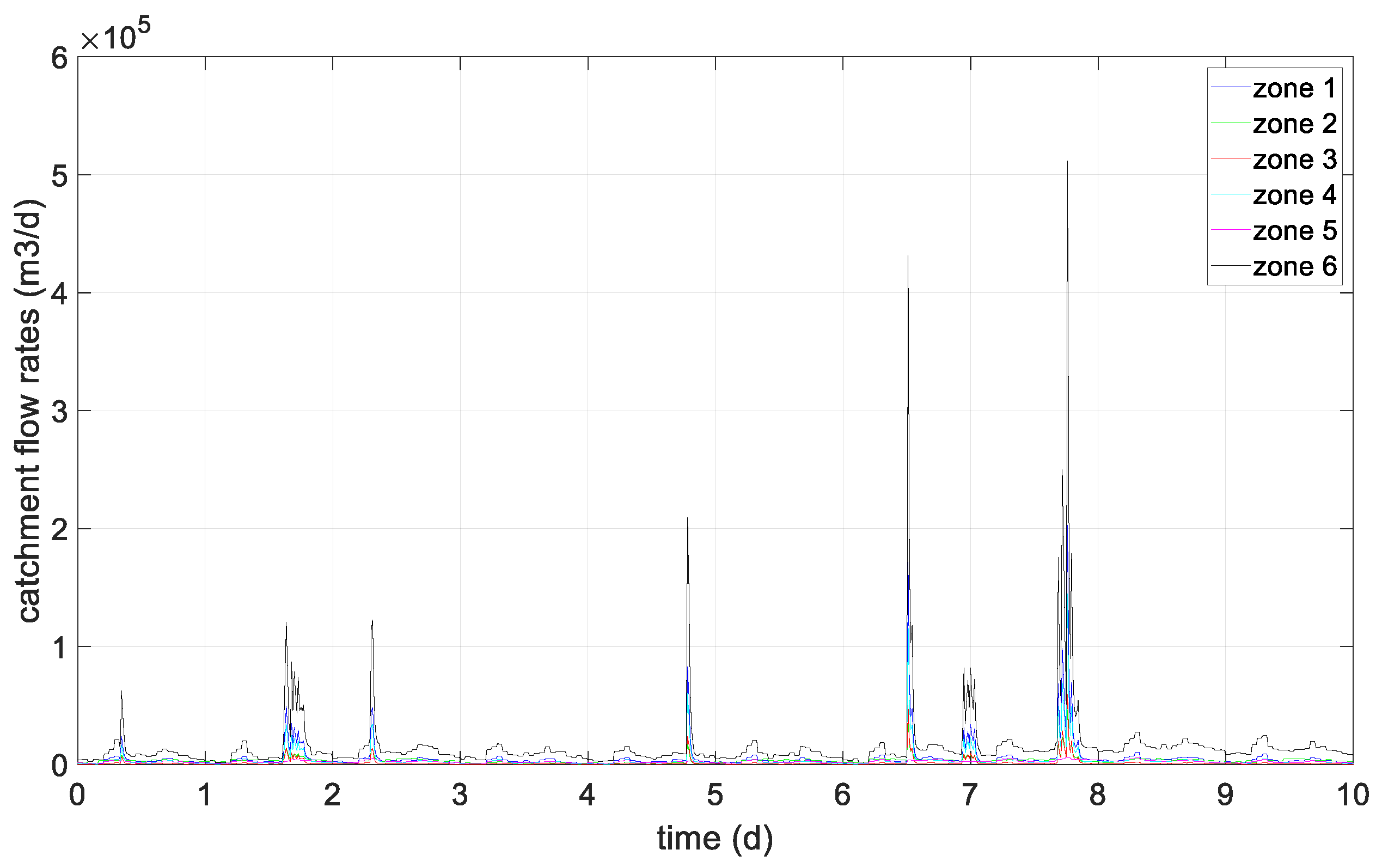
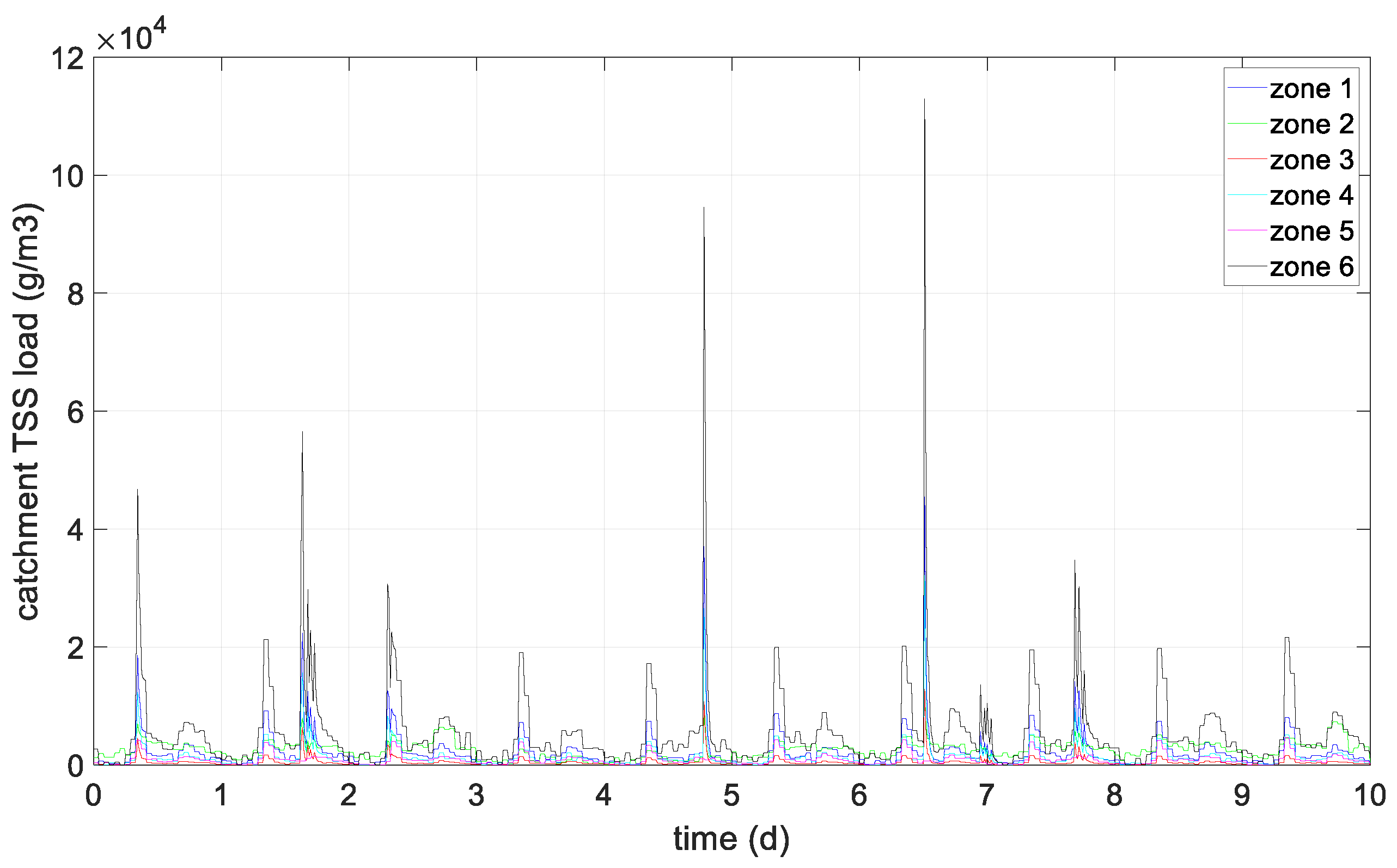
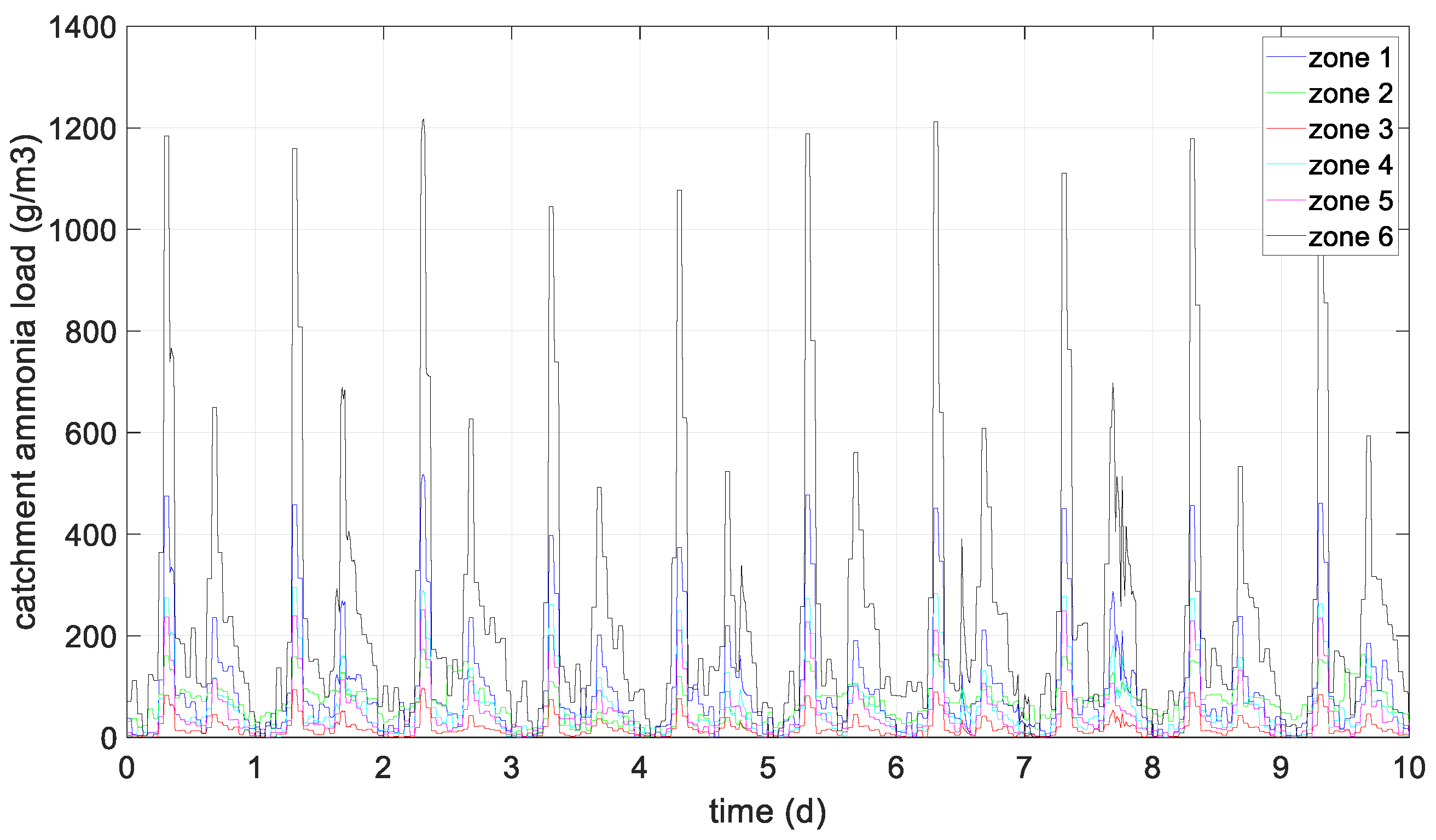
This section presents some simulation results. To reduce the computational time, a period of
Tsim = 10 days has been taken out from a two-year data series of the benchmark [
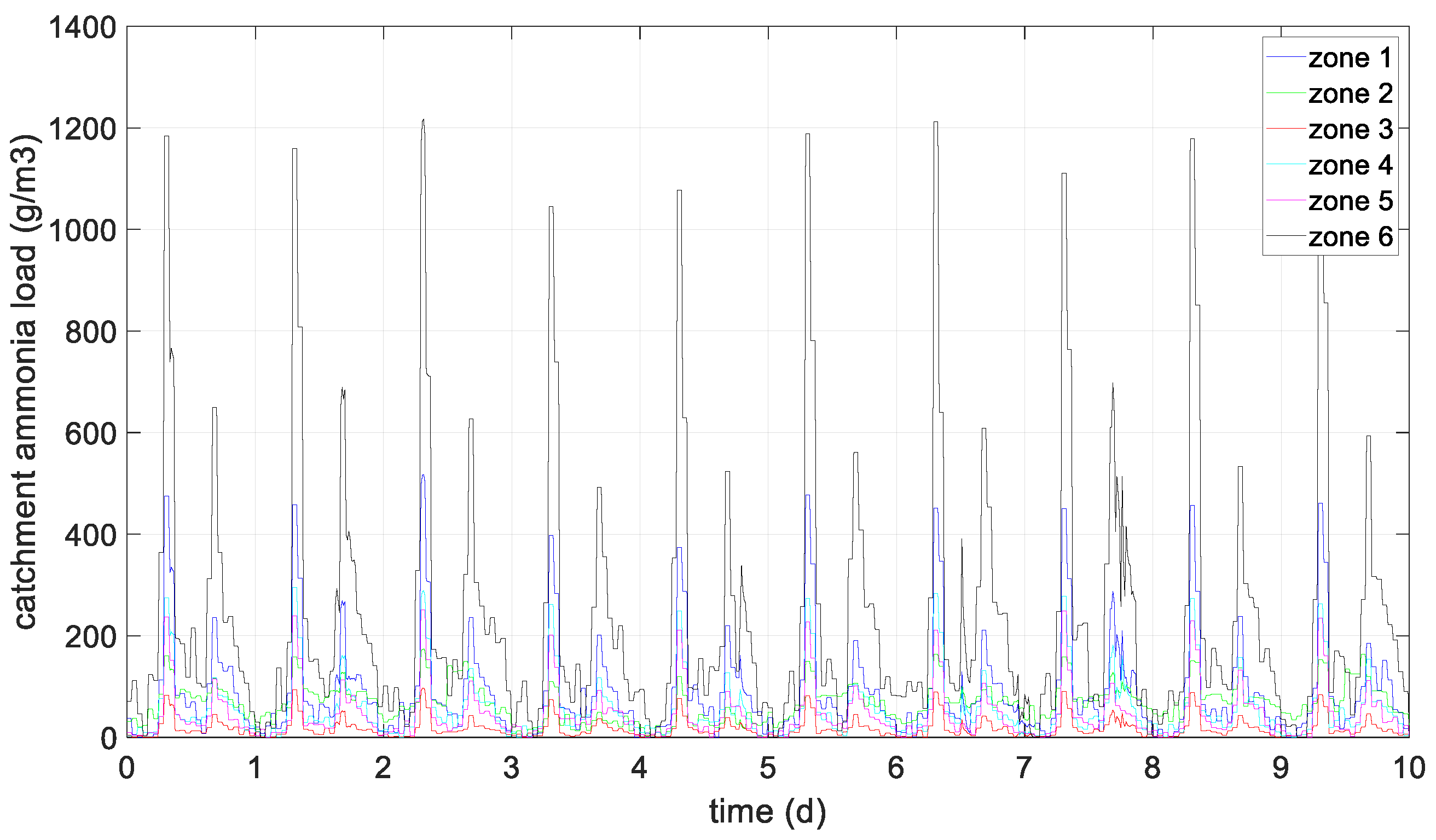
5], where the flow variability is more significant and represents a specific period of a humid season with heavy rainfall (
Figure 5) with their concentrations of suspended solids (
Figure 6) and ammonia (
Figure 7) as representative pollutants.
To assess the methodology presented in the article, four cases have been considered. The first case (CASE 1, without control) consists of keeping all the tank output valves fully open. The second case (CASE 2, DMPC based on a cooperative game) considers two local MPCs in relation to the models shown in (15) and a negotiation based on a cooperative game shown in [
45]. The third case (CASE 3, DMPC with fuzzy negotiation) corresponds to the methodology exposed in this work, and centralized MPC is CASE 4.
In addition, for each control algorithm, two options have been considered depending on whether concentrations of TSS are included or not. The collected water comes from the urban wastewater and intensity variable rainfall events in relation to the season, which are the ones that usually cause the overflow in the deposits and at the input of the WWTP. For all cases, the prediction horizon selected is
N = 5, and the weights in the cost function are shown in
Table 3.
The system parameters are shown in
Table 4 (extracted from [
5]).
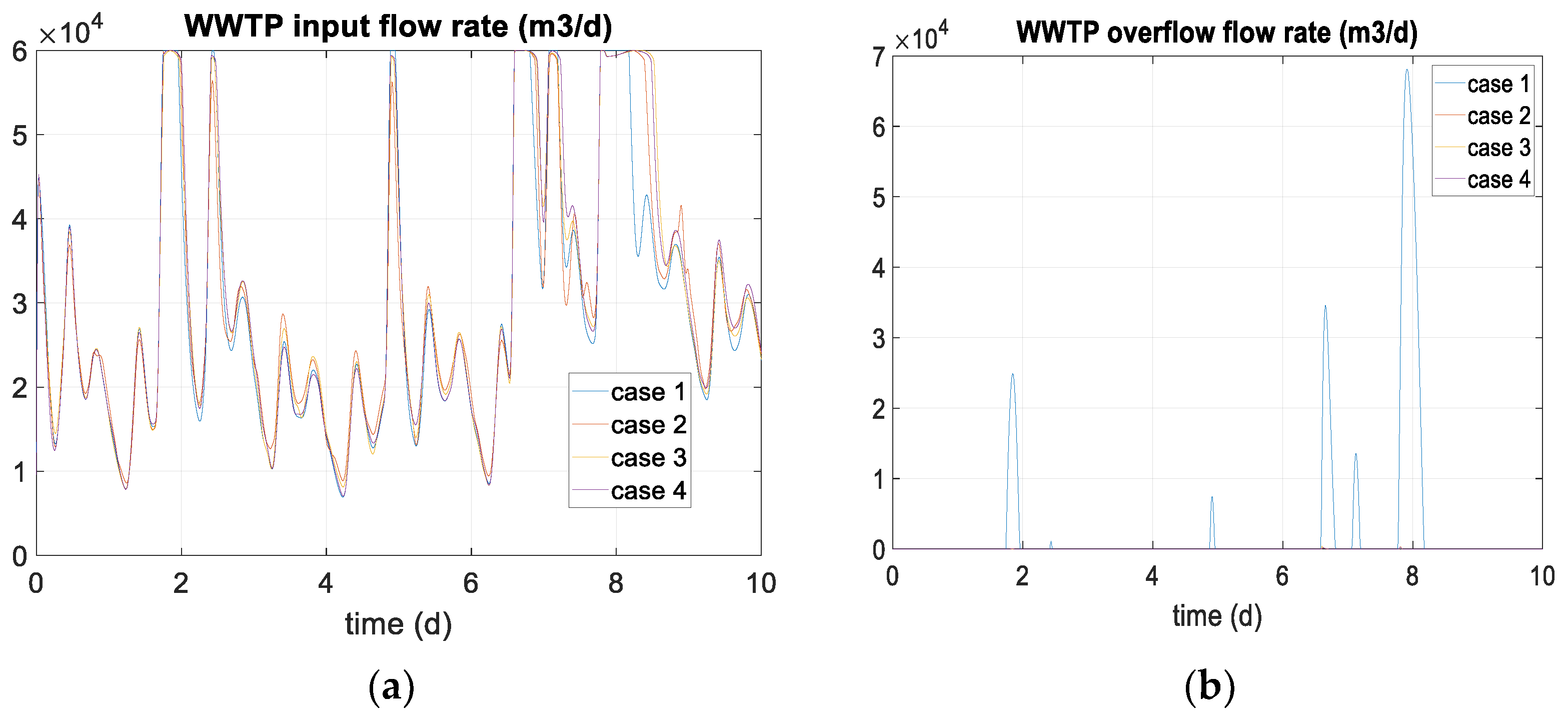
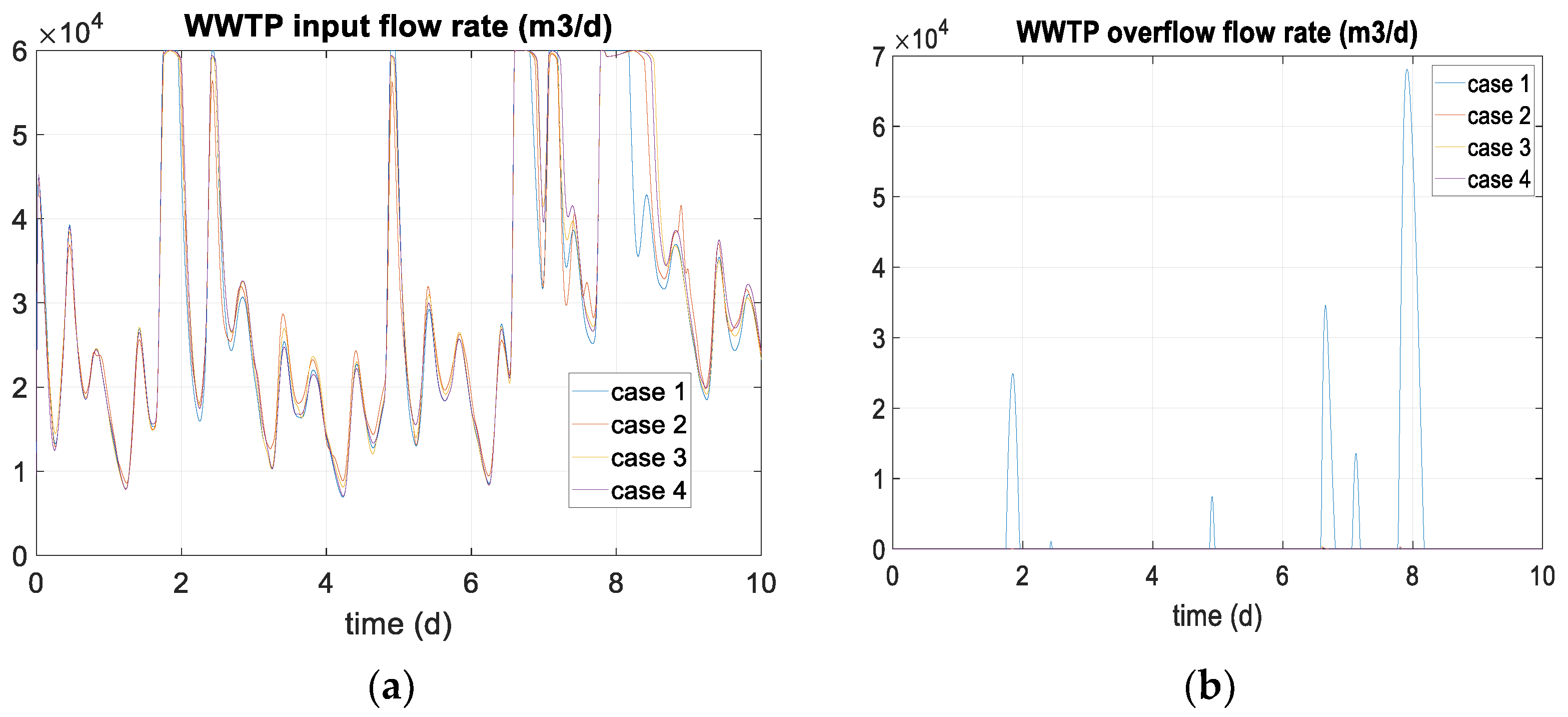
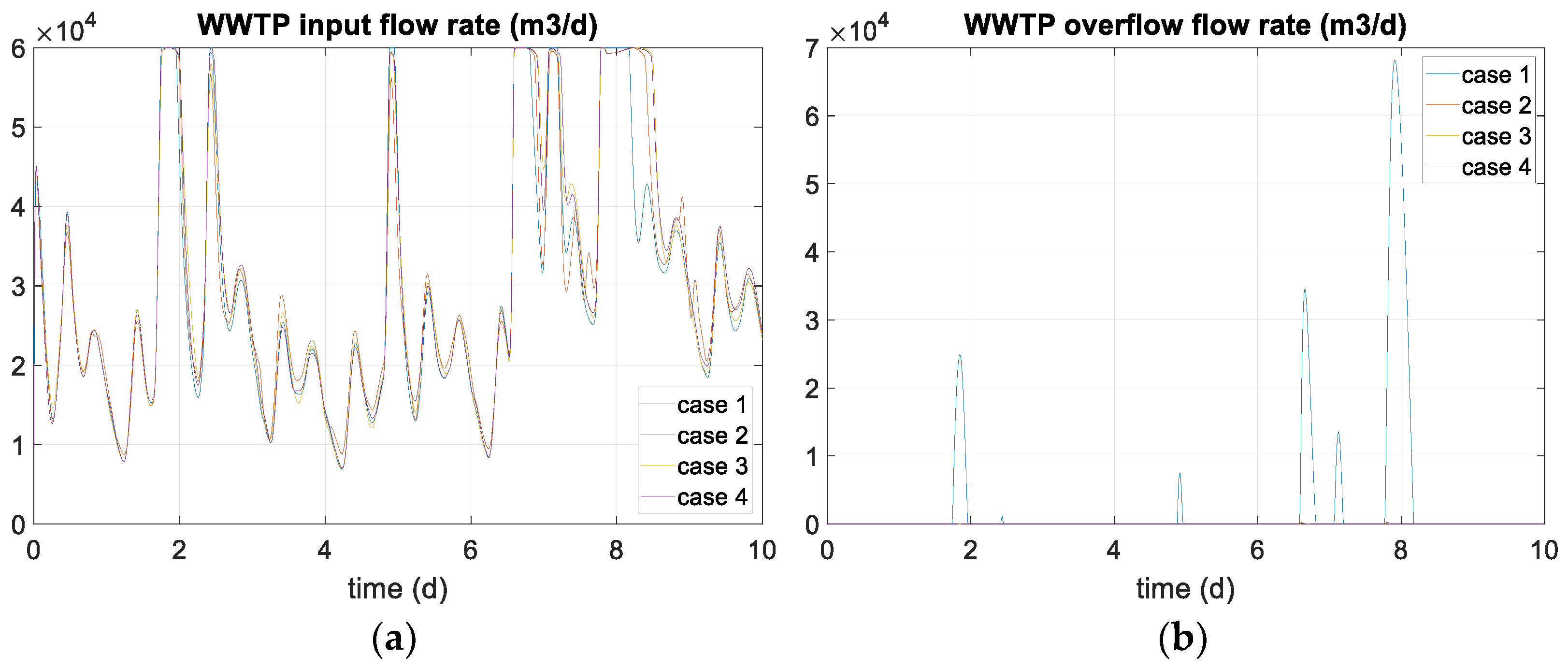
Firstly, results without including the concentration of TSS are shown as a basis for comparison with the methodology proposed in this paper. In summary, they correspond to the methodology of [
46] adapted to be applied to the sewer benchmark [
5]. As you can appreciate in
Figure 8, the inflow to WWTP has no significant difference for all cases (a), the same for the overflow flow rate (b) at the entrance of WWTP, corresponding with inlet flows higher than its nominal value (60,000 m
3/d), except for case 1. The differences between all the cases can be better appreciated in the numerical results of
Table 5.
Due to the water collected in the catchments having great variability, it is not easy to hold the nominal flow value at the WWTP inlet, and most of the time, it cannot reach this value. However, when any control is applied, more wastewater is retained in deposit 5, producing a better regulation of the WWTP inlet flow (
Figure 8a), which is particularly noticeable at the last rainfall peak.
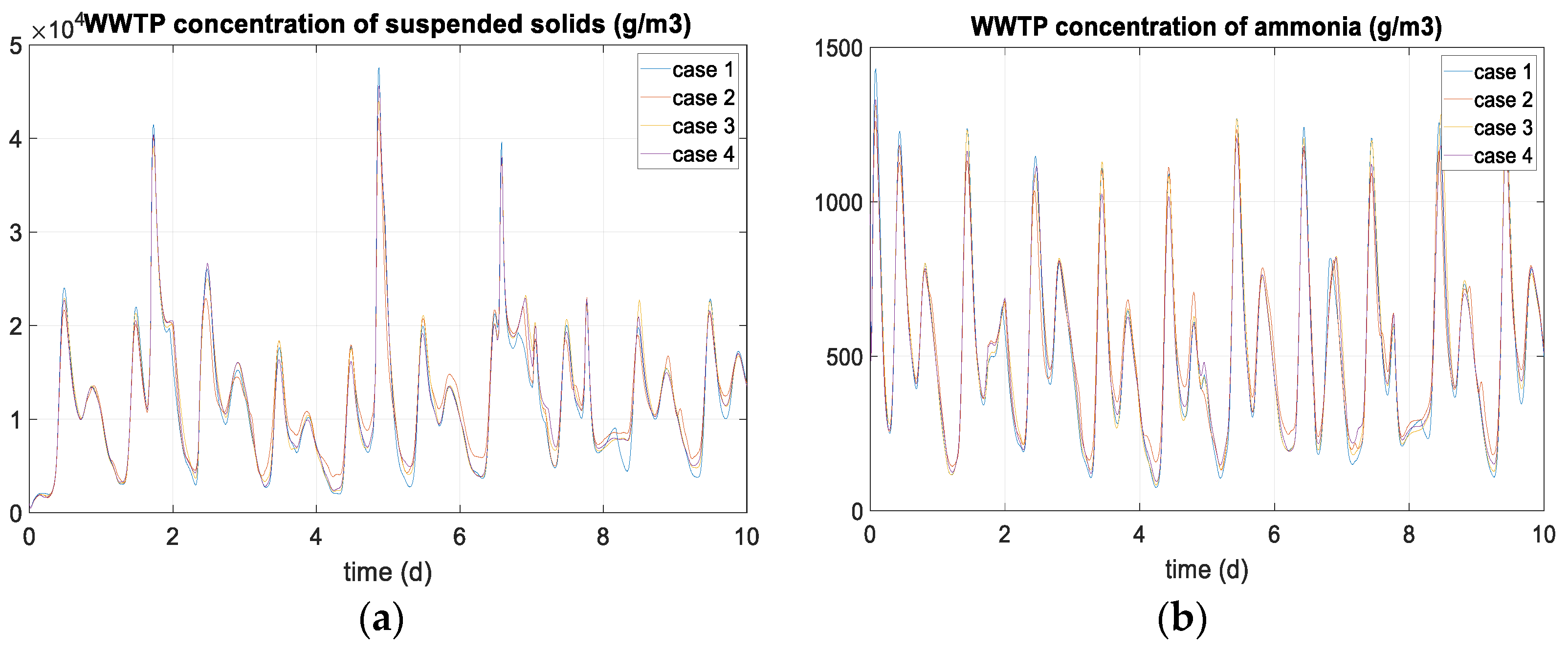
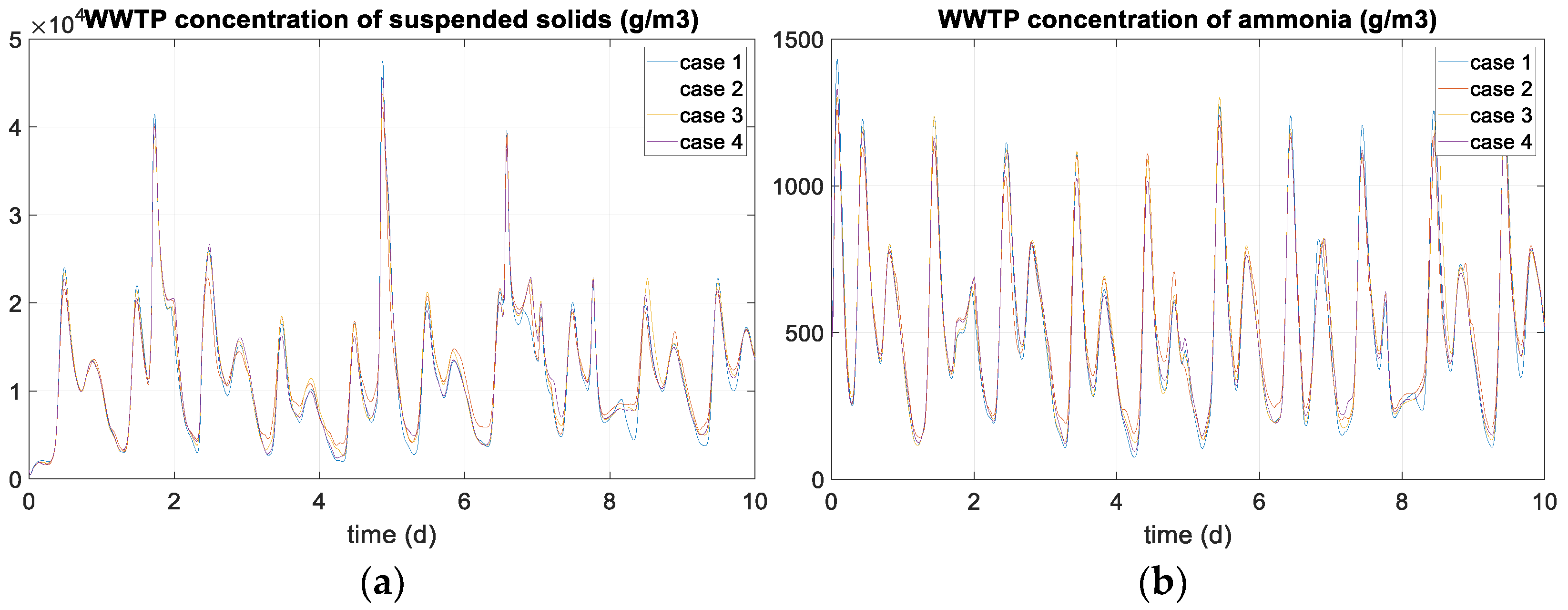
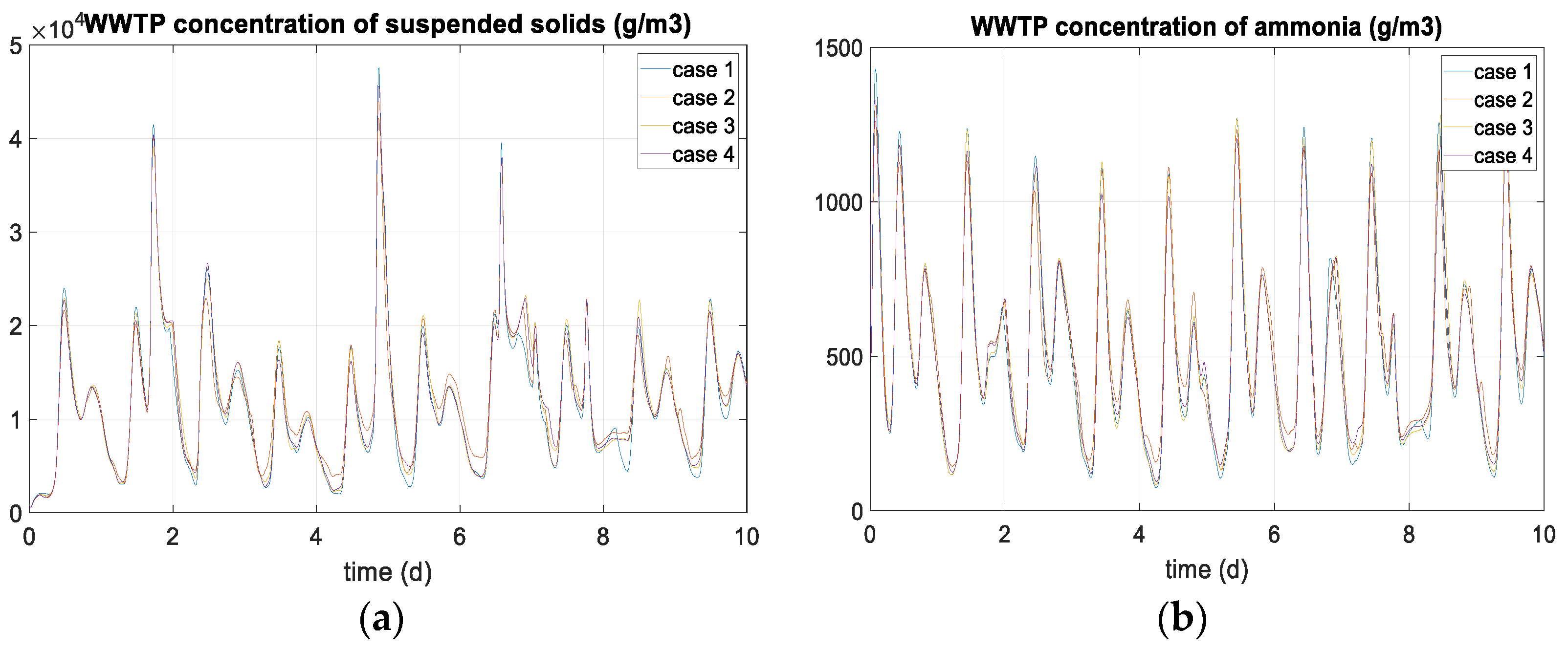
Figure 9 describes the dynamics of some contaminants in the WWTP provided by the benchmark that includes transport models for all pollutants (TSS and ammonia) in each case. No significant differences are observed, but, in general, it is observed that both the peaks and the valleys are more pronounced in the uncontrolled case than in the controlled cases.
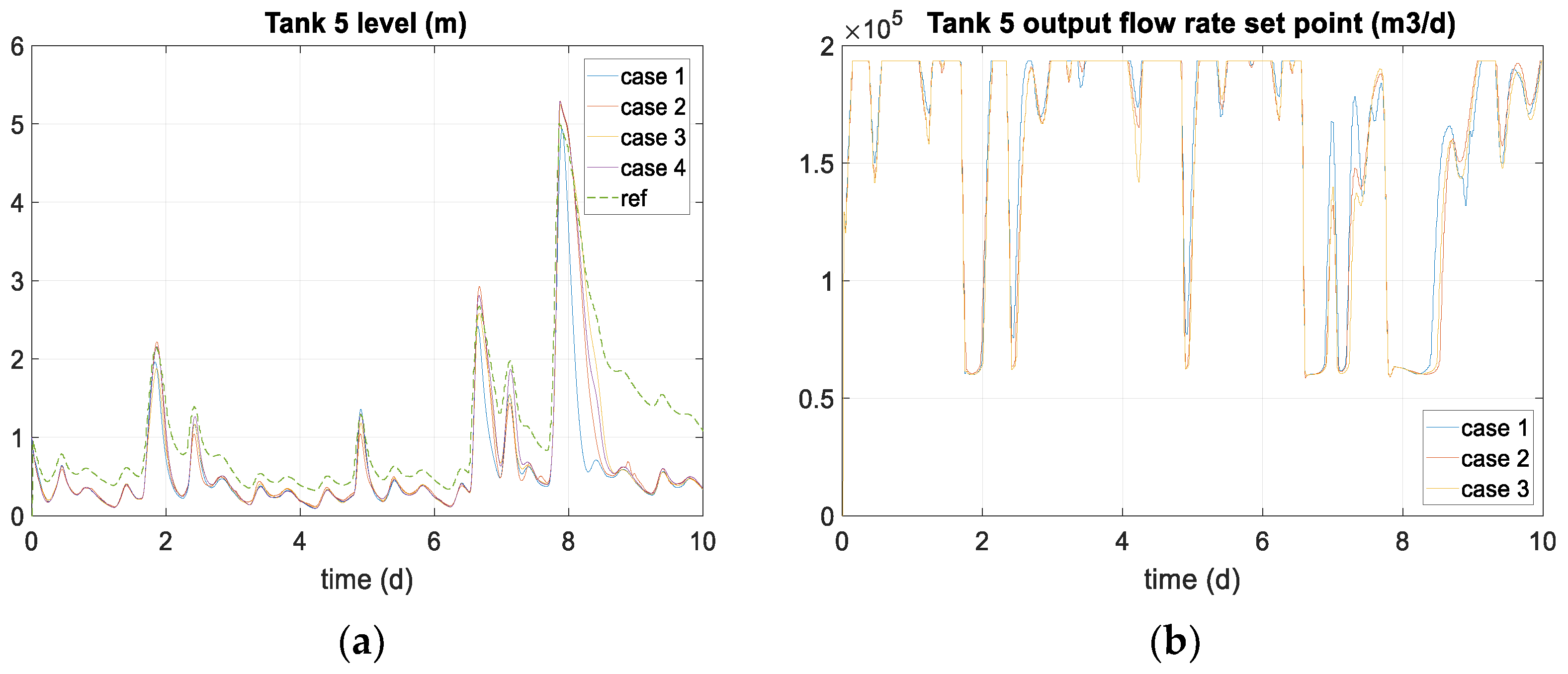
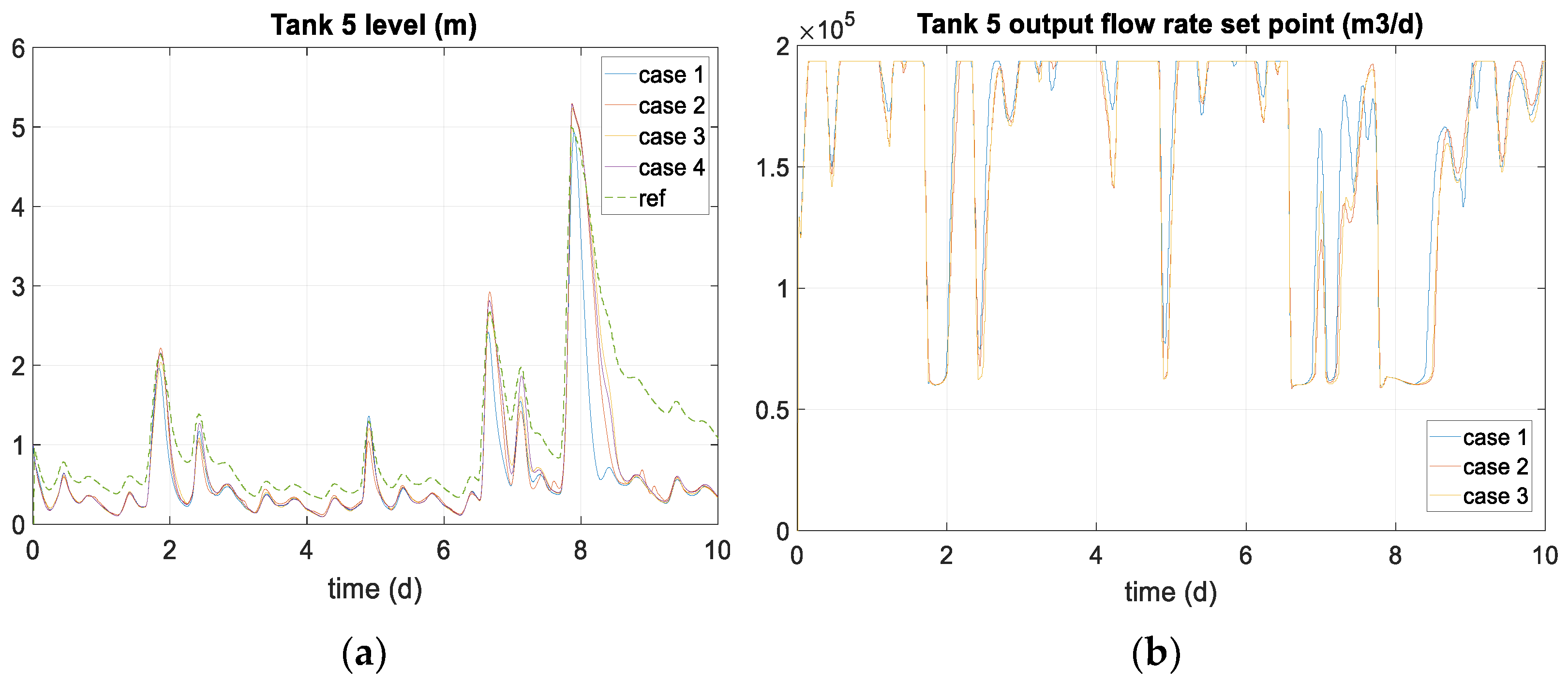
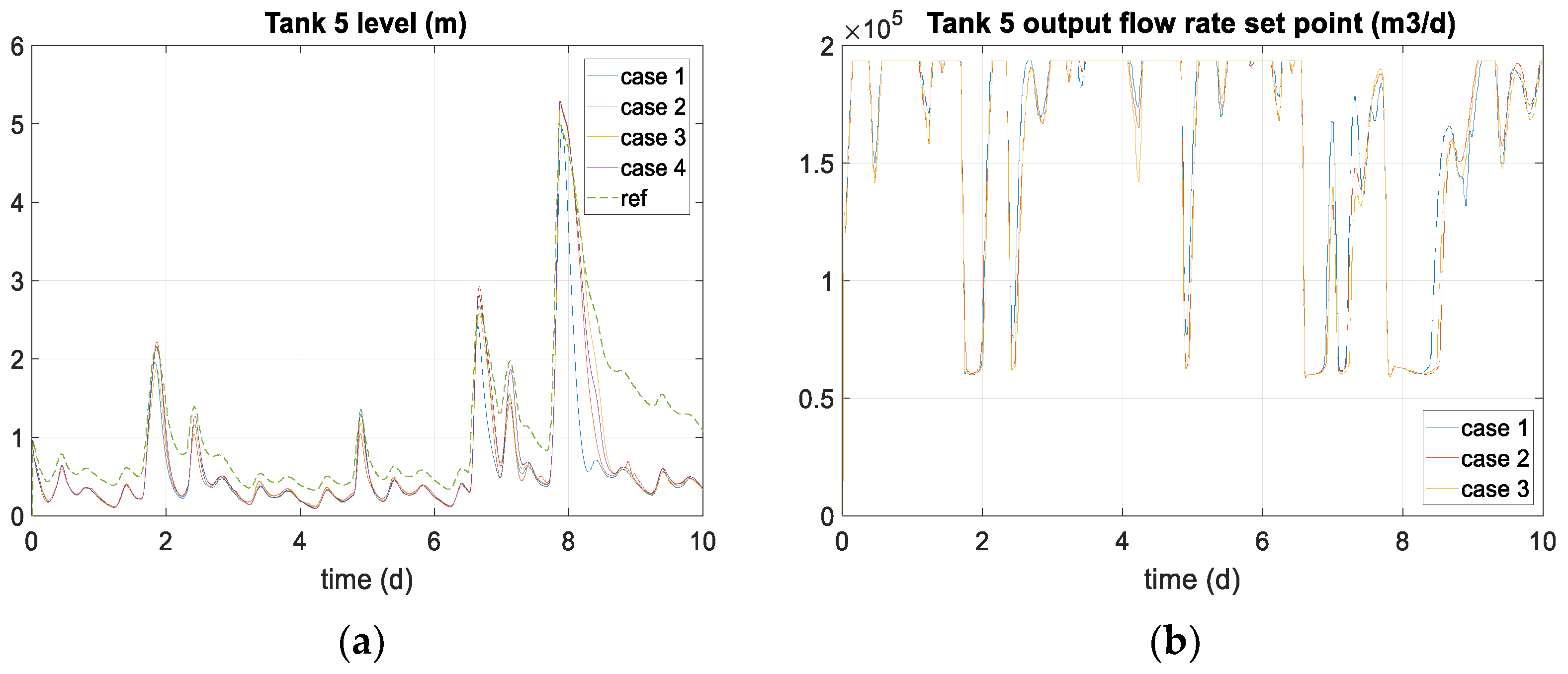
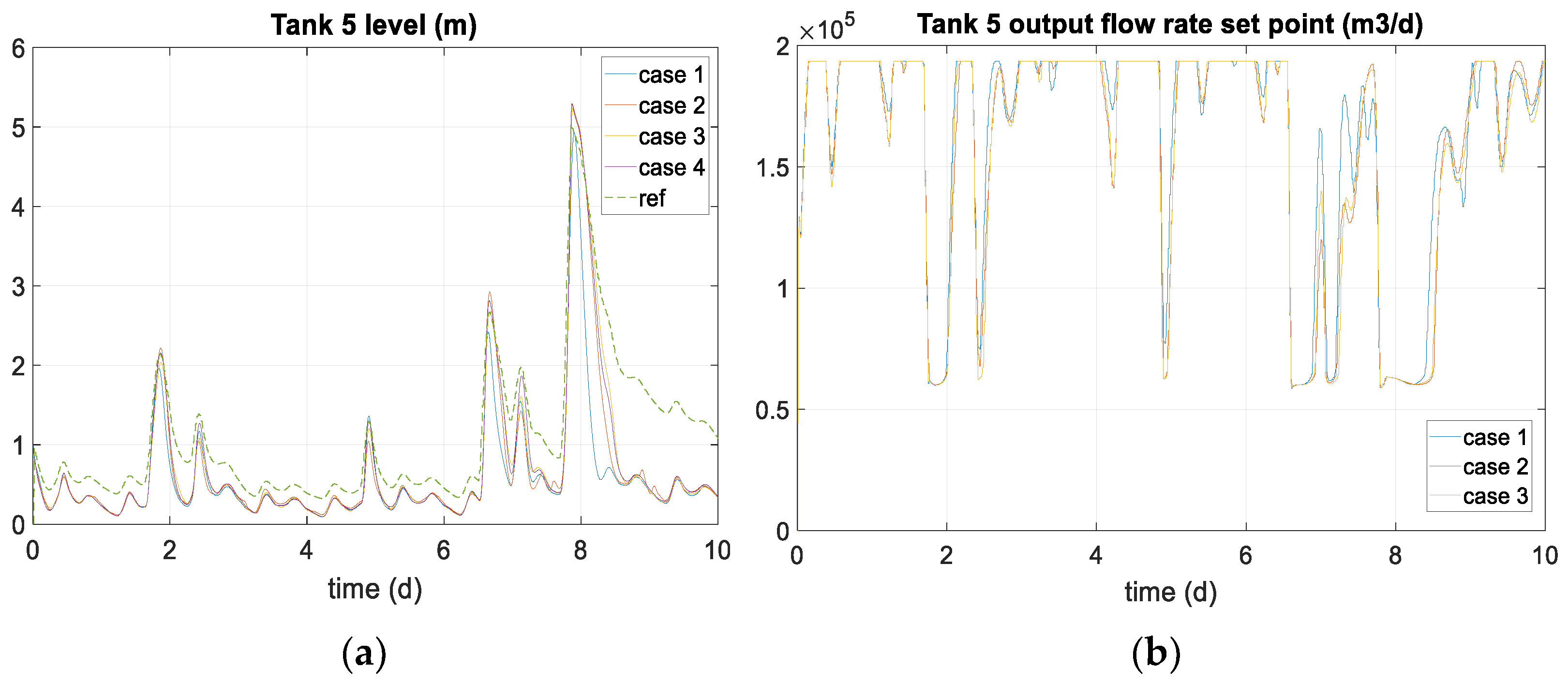
As an example,
Figure 10 shows deposit 5 level (a) and outflow set-point (b),
u5, in each case. The water level signal in tank 5 is shown together with the set-point calculated by the upper level of the hierarchical control system. The set-point tracking is appreciably better for cases 2, 3, and 4 than for case 1, especially at rainfall peaks. Hence, if no control is applied, most overflows are generated at the WWTP inlet because not enough water is being retained in the sewage deposits. Moreover, the controlled cases reduce the total amount of overflows at the WWTP inlet and the total overflowed water volume (
Table 4).
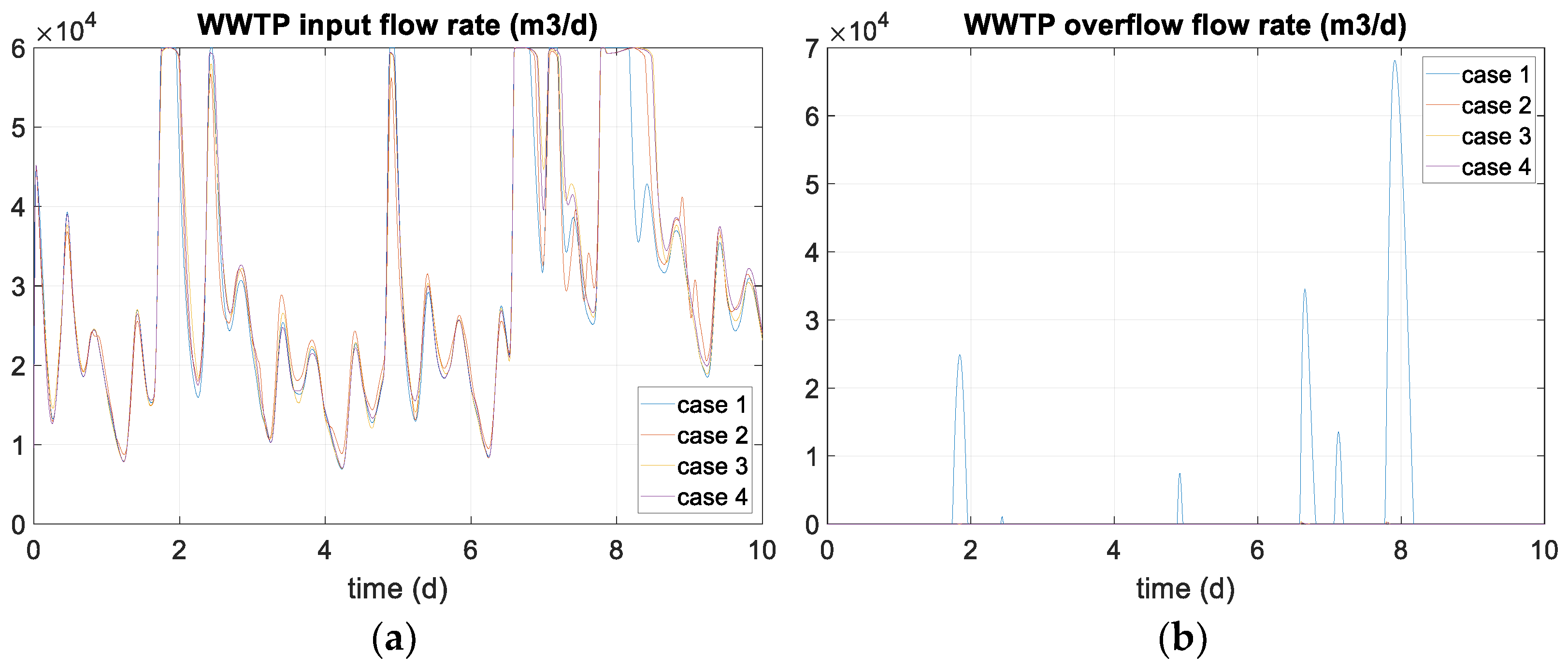
The results obtained applying the methodology proposed in this work including TSS are shown in
Figure 11,
Figure 12 and
Figure 13. There are no significant differences comparing with previous results. Therefore, more insight is obtained from
Table 6 and
Table 7.
For the four cases,
Table 5 and
Table 6 show the performance indices of
Section 2.2. Case 1 (without control) presents the poorest indices, as we expected, and the centralized MPC shows the best behaviour for the average flow at the input WWTP (
QWWTP) for the degree of usage of the treatment plant (
Gu), for the total overflowed volume (
Vov), and for the total overflowed pollutants (
Mssov,
NHov,
NOov,
POov). Moreover, the DMPC with fuzzy negotiation does not present a great worsening of those indices, with the advantage of using local optimization problems. Moreover, the smoothing effect of the fuzzy sets selected for negotiation is the reason why the use of fuzzy DMPC obtains the smallest
S. The case of DMPC based on a cooperative game provides the worst performance indices of controlled cases because the negotiation is performed in a discrete way from evaluating costs for different combinations of control actions.
Regarding the numerical results, the performance improves when the concentration of pollutant is considered, except in case 2, although this is not very significant.
However, the best performance improvement is in case 3 because the negotiation between agents considers the overflowed TSS mass.
Table 7 shows the comparative performance improvement in each case.
In the end, to analyze how the location of the fuzzy sets affects the behavior of the DMPC algorithm, fuzzy sets have been moved, as shown in
Table 8, while preserving their shape.
The results not including the concentration of suspended solids (without TSS) are presented in
Table 9, and the results including TSS are presented in
Table 10.
For the first situation, the DMPC1 and DMPC2 cases show similar results, so the influence of the place of the fuzzy sets is very small. Regarding DMPC3 and DMPC2, the degree of usage of the treatment plant is slightly smaller in DMPC3 because the fuzzy set has been moved to the inlet flow constraint of 60,000 m3/d. By comparing DMPC4 and DMPC3, the overflow (Vov) is larger for DMPC3 because the fuzzy set does not consider minor overflows. In conclusion, the results have no significant differences because the fuzzy sets are very close to each other, but DMPC4 presents the best performance.
For the second case, the place of the fuzzy sets affects more than before. This influence is more difficult to establish since the fuzzy sets depend at each instant on the concentration of suspended solids. However, the results have no great differences due to the fuzzy sets being very close to each other, but DMPC3 presents the best performance.
8. Conclusions
This work presents a DMPC with fuzzy negotiation applied to a simulated sewage network benchmark, offering good results in comparison with centralized MPC and DMPC based on a cooperative game. Naturally, centralized MPC obtains the best results, as this controller uses the entire model of the system. Nevertheless, the DMPC results have no great differences, but in this case, the control system manages simpler optimization problems and, like other distributed strategies, provides the system with a certain fault tolerance. In comparison with a DMPC based on a cooperative game, fuzzy negotiation improves the results significantly. In addition, the fuzzy negotiation includes expert knowledge of the sewer system considering fuzzy sets whose shape is real-time adapted to the process depending on the needs of the sewer system.
Moreover, only DMPC with a fuzzy negotiation algorithm considering the concentration of suspended solids improves the performance of the sewer system even more, reducing both the volume and the pollutant mass overflowed in the whole of the system, whereas DMPC based on a cooperative game does not and the MPC algorithm does not show a relevant improvement. It has been possible to verify that the improvement introduced by considering suspended solids in the MPC and DMPC algorithms is due more to the increase in the penalty for overflows and to the peculiar adaptive construction of fuzzy sets than to the optimization of the concentrations of suspended solids in the network.
Consequently, UDS control is fundamentally driven by level and flow dynamics, but the inclusion of the TSS concentration improves the industrial implementation of the controller.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}