
Gearbox Fault Diagnosis Based on Optimized Stacked Denoising Auto Encoder and Kernel Extreme Learning Machine

Abstract
:1. Introduction
- Traditional fault diagnosis methods need manual feature extraction. However, manual feature extraction is obviously time-consuming and laborious, and feature selection depends on past experience, which has limitations in practical engineering applications.
- Deep learning methods can effectively learn the deep information hidden in the data, but the selection of parameters for commonly used deep learning network models is based on previous experience and personal experimental debugging, which is time-consuming and labor-intensive, and fault diagnosis models require a large amount of labeled data to be trained for a long time to ensure the accuracy of the diagnosis results and the generalization of the diagnosis model.
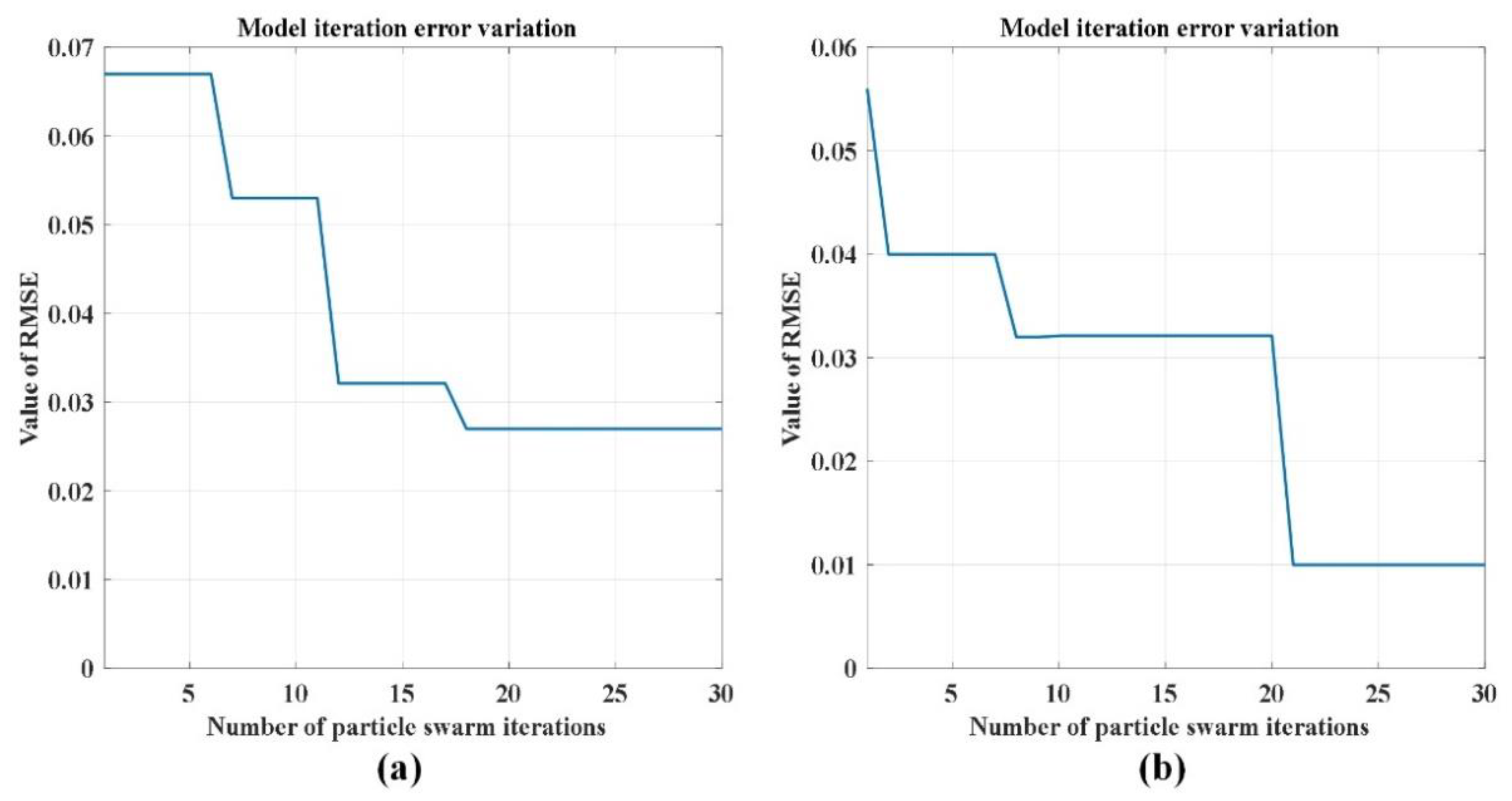
- By improving the inertia weights of particles and adopting the PSO with adaptive weights, the parameter optimization of the SDAE network is faster and more effective.
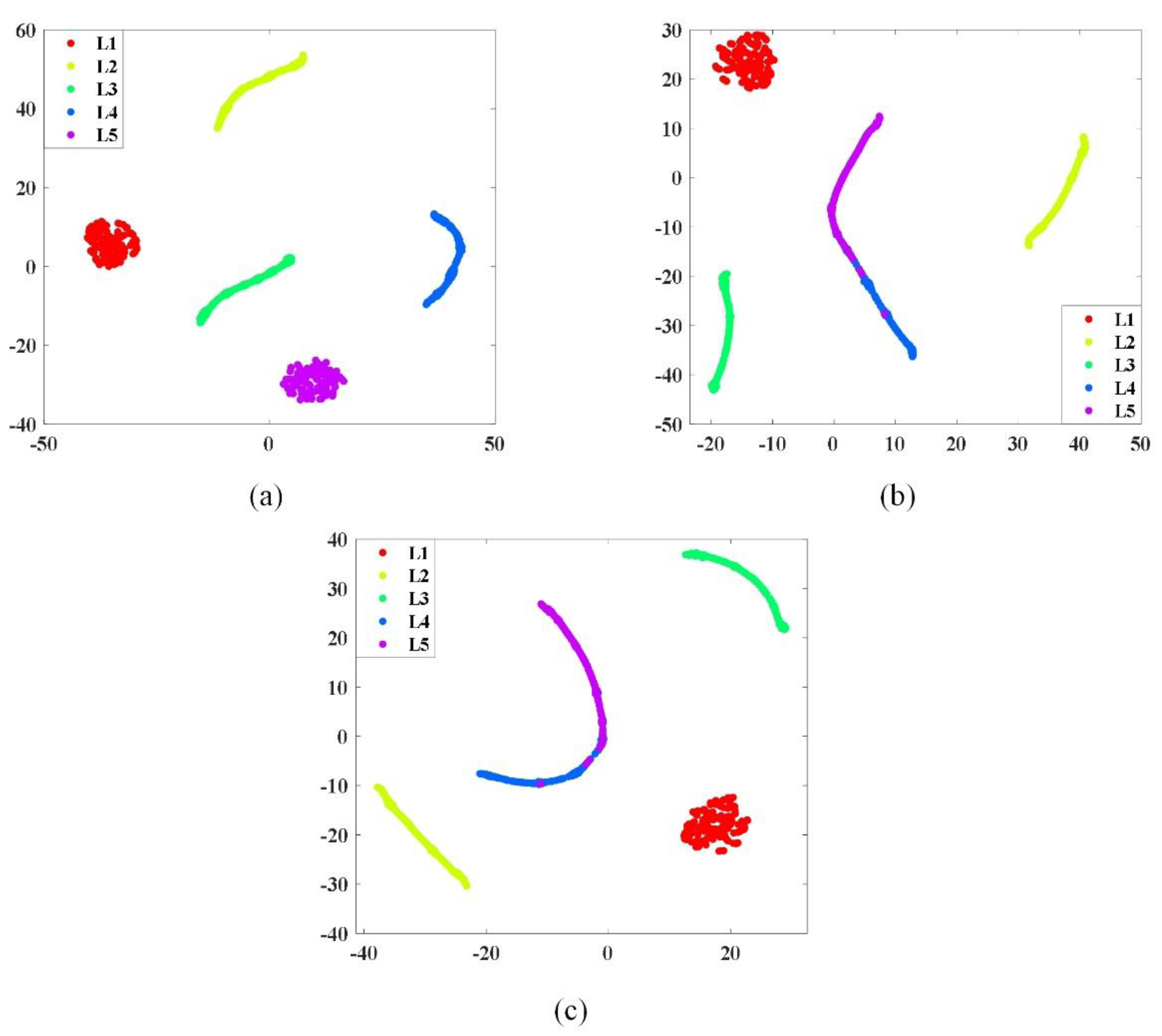
- Using the optimized SDAE network structure, deep-level features can be extracted directly from the original signal, avoiding the disadvantages of manual feature extraction.
- The SAPSO-SDAE-KELM diagnostic model proposed in this paper solves the problems of noise reduction and dimensional catastrophe of the original signal, avoids the phenomenon of overfitting, and achieves rapid diagnosis of gearbox faults.
2. Theoretical Background
2.1. SDAE Implements the Principle of Dimensionality Reduction and Denoising
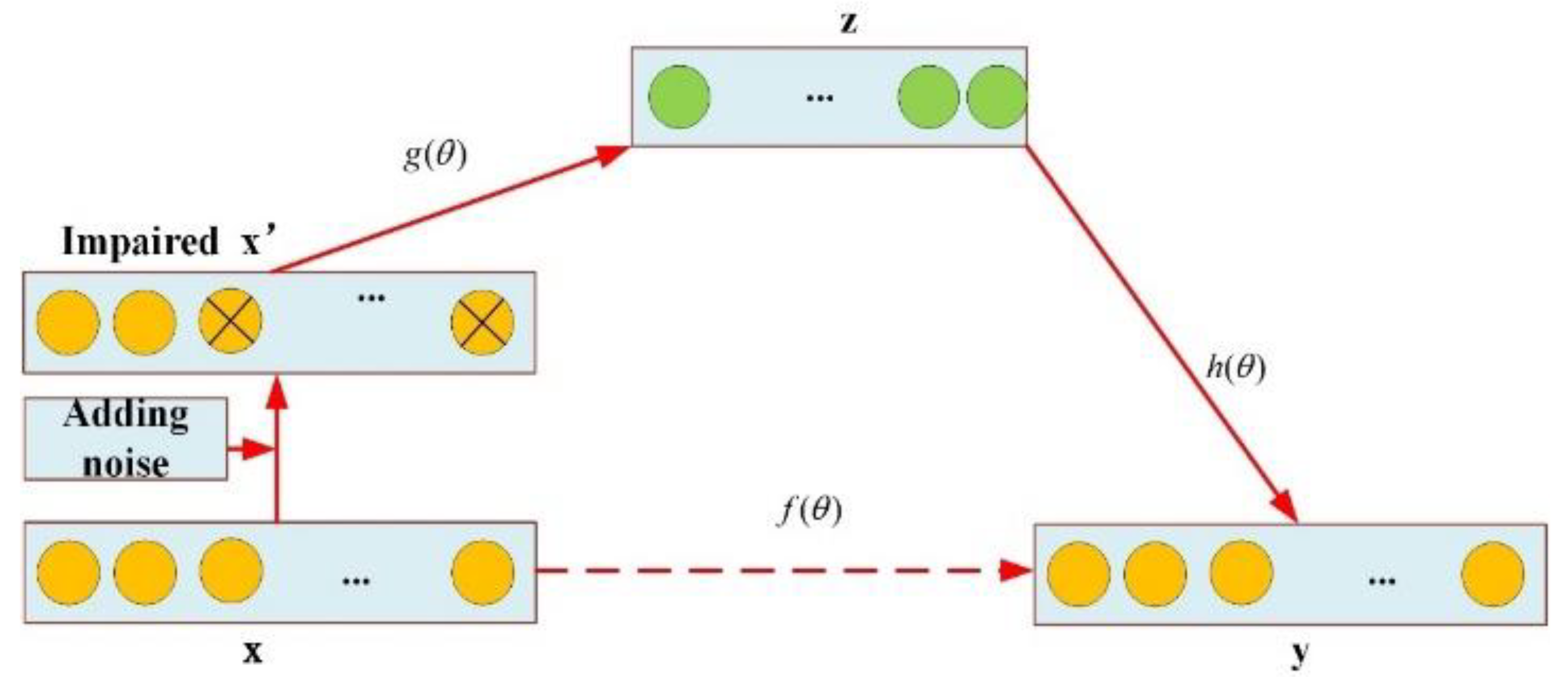
2.1.1. Principle of Noise Reduction with Denoising Autoencoder
- Input noise to the original vibration signal to obtain the damaged signal .
- The damaged signal a is used as the input, and the hidden layer Z is obtained through encoding. The encoding formula is as follows:
- After decoding and reconstruction, the reconstructed signal is obtained, so that reconstructed signal is close to the original signal .
- Train the parameter in the DAE with minimized reconstruction error:where is the original vibration signal, is the original signal after adding noise, is the hidden layer variable, is the reconstructed signal, is the weight coefficient, is the bias vector, , and are the activation functions.
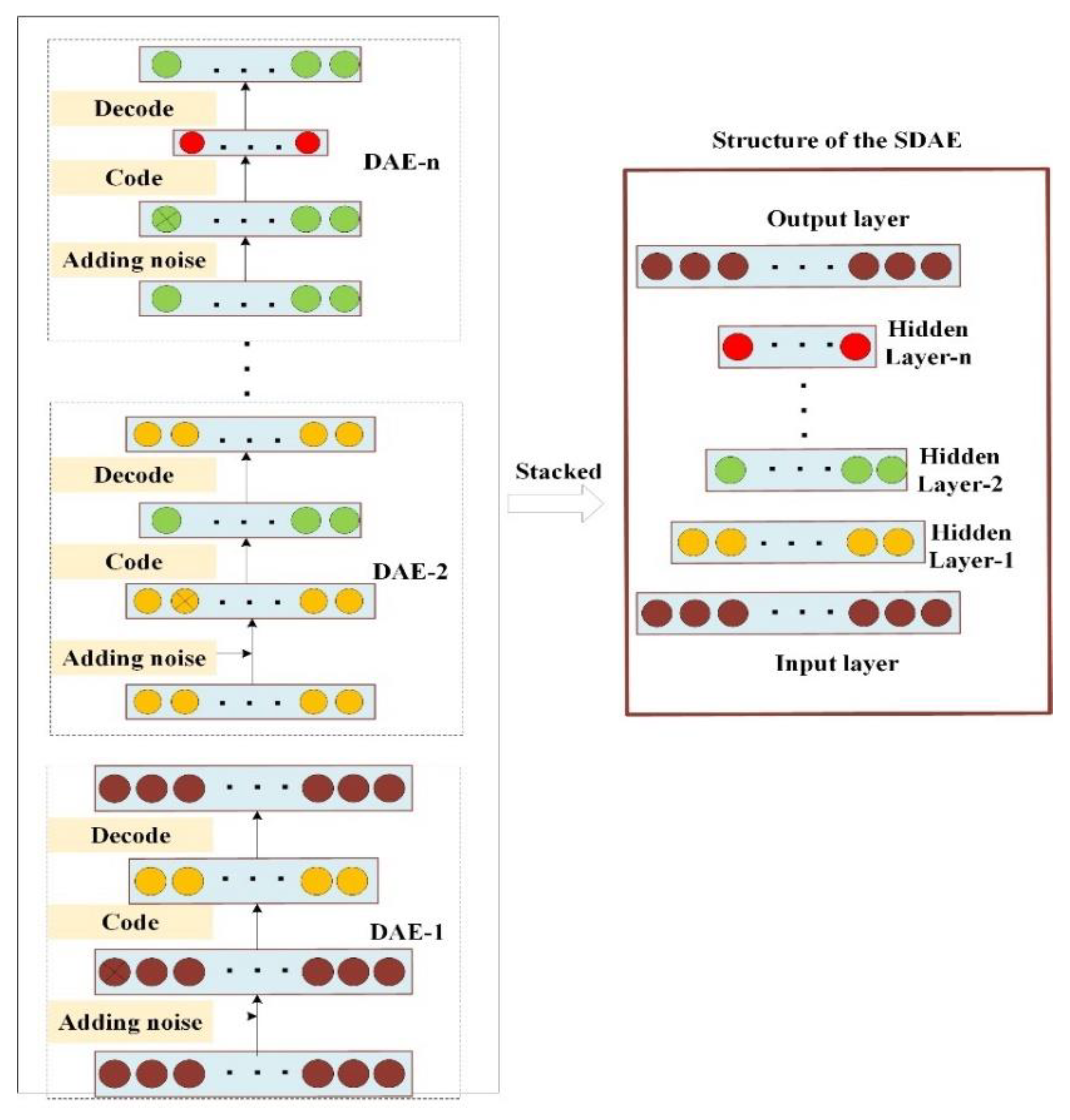
2.1.2. Stacked Denoising Autoencoder (SDAE)
2.2. An Improved PSO Algorithm for Selecting SDAE Network Parameters
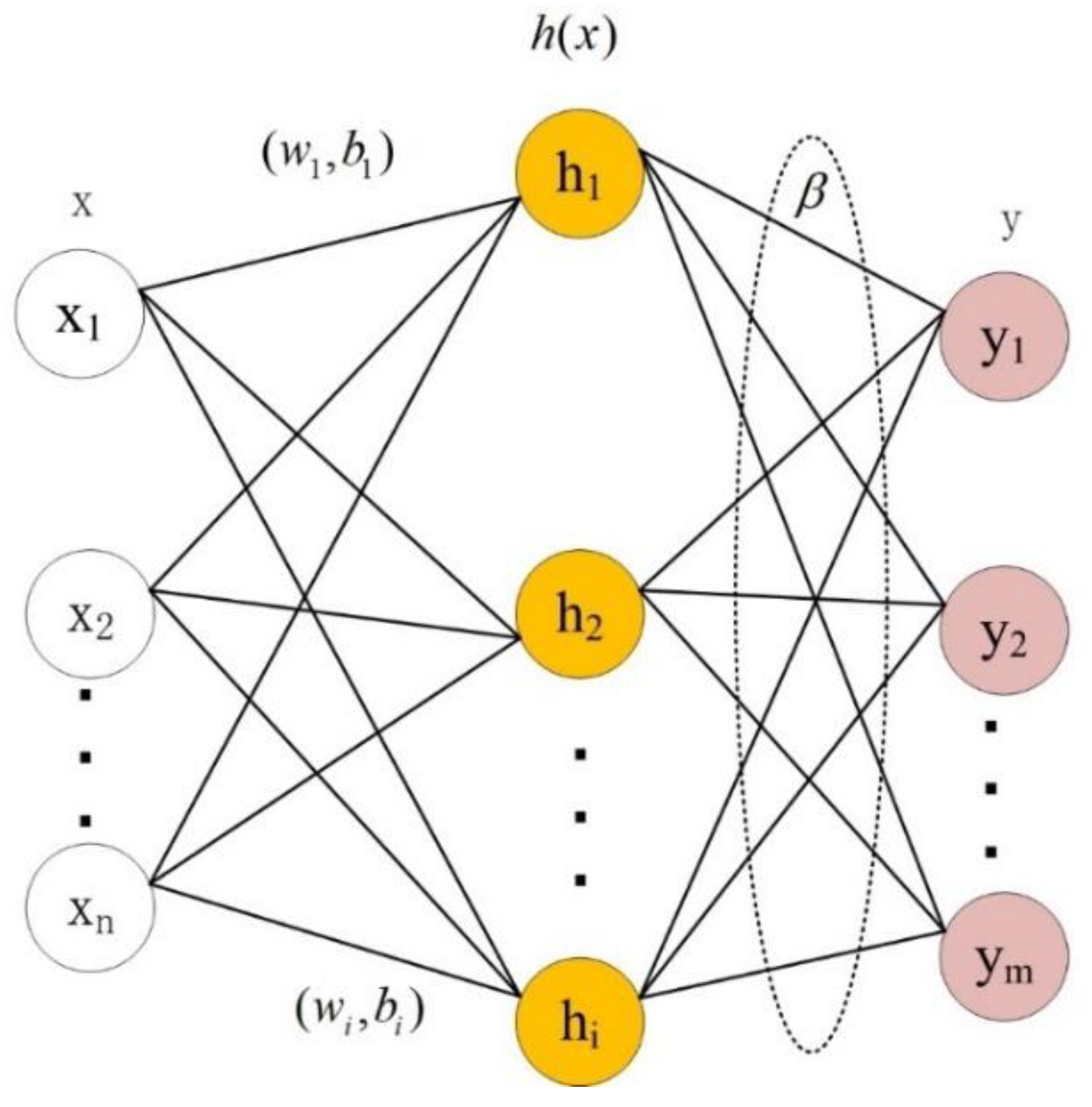
2.3. Kernel-Based Extreme Learning Machine (KELM)
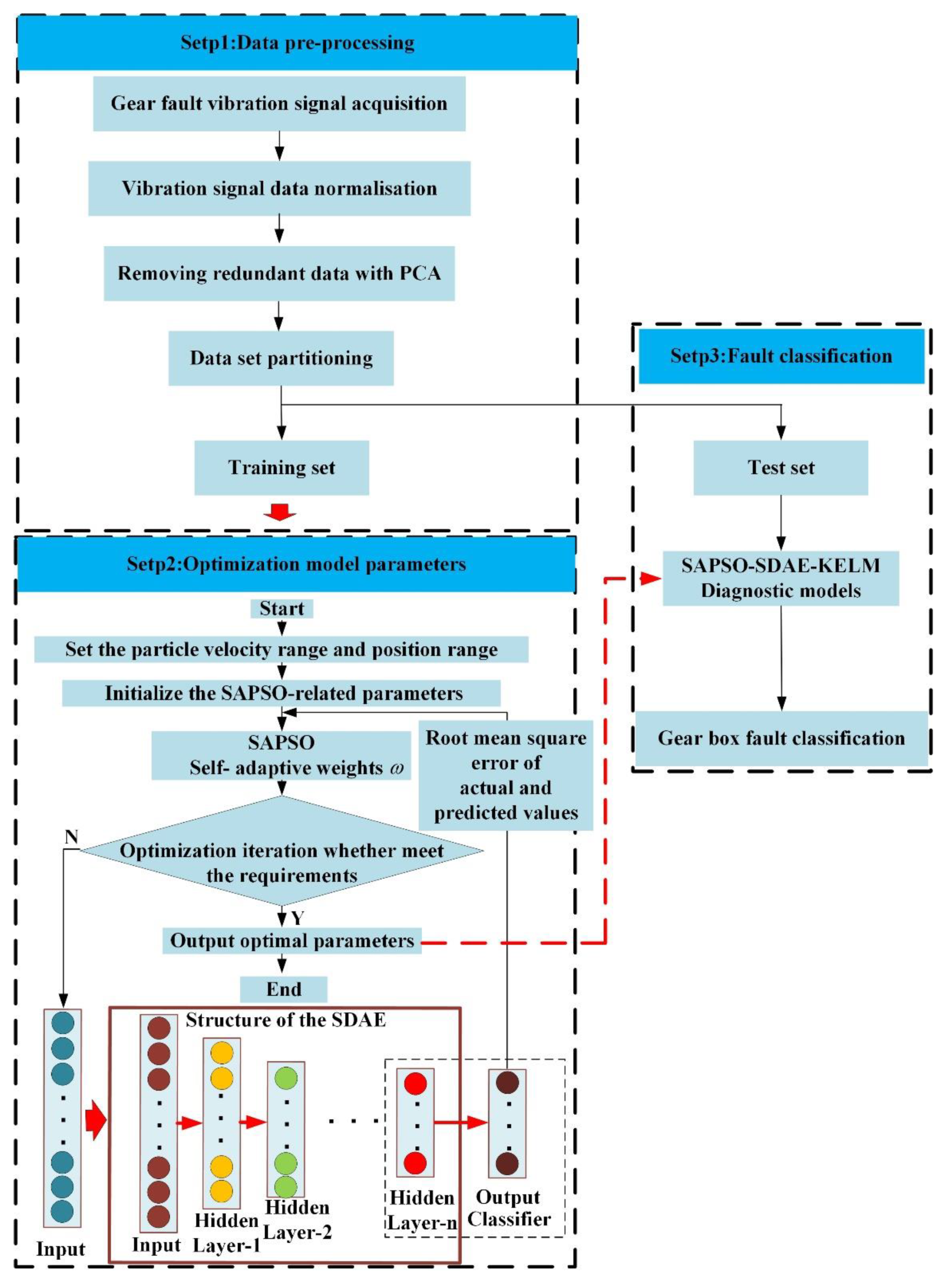
3. SDAE Network Construction and SAPSO-SDAE-KELM Troubleshooting Process
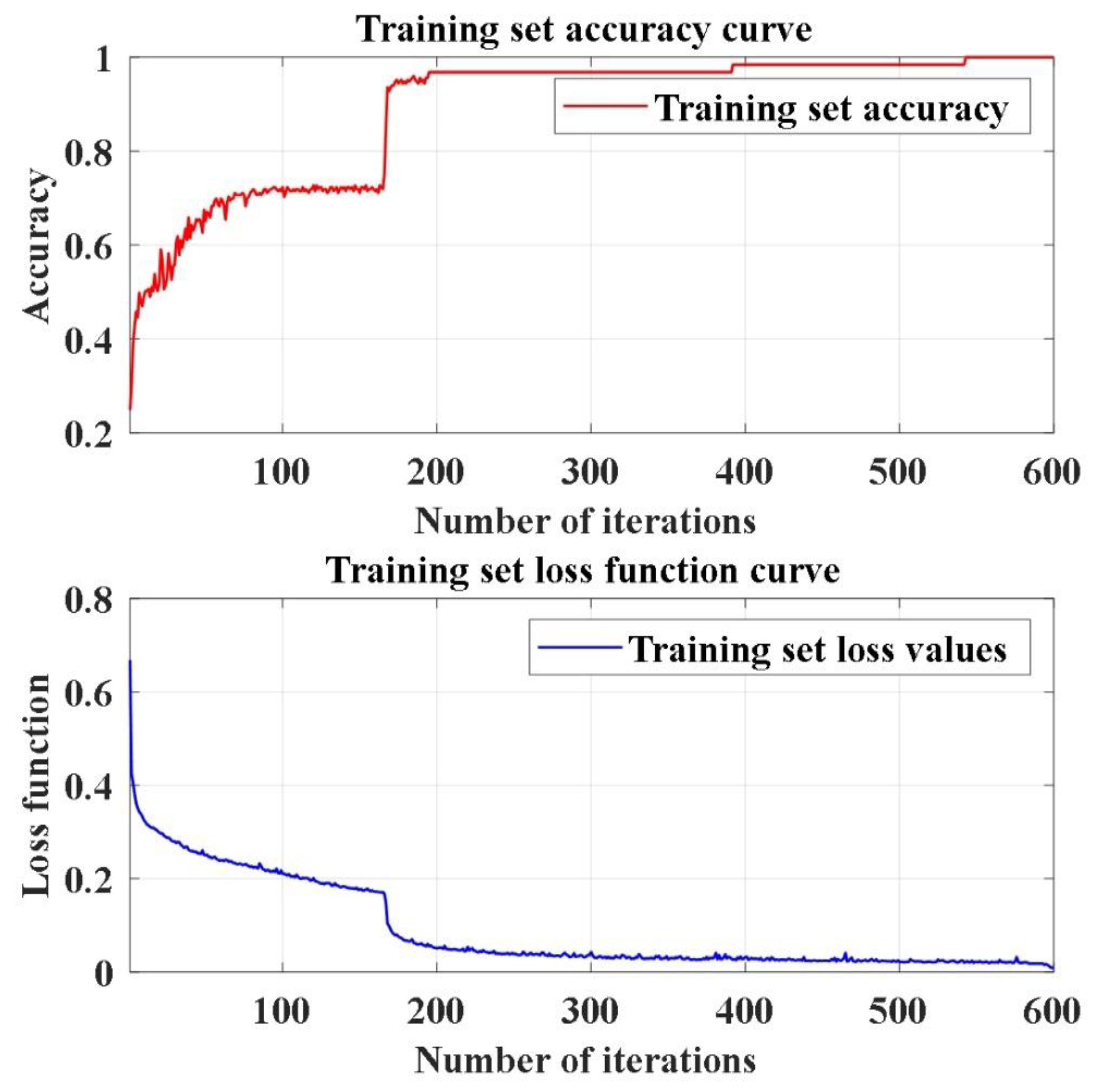
3.1. Construct the Optimal SDAE Network Chat Structure
3.1.1. Determine the Number of Hidden Layers
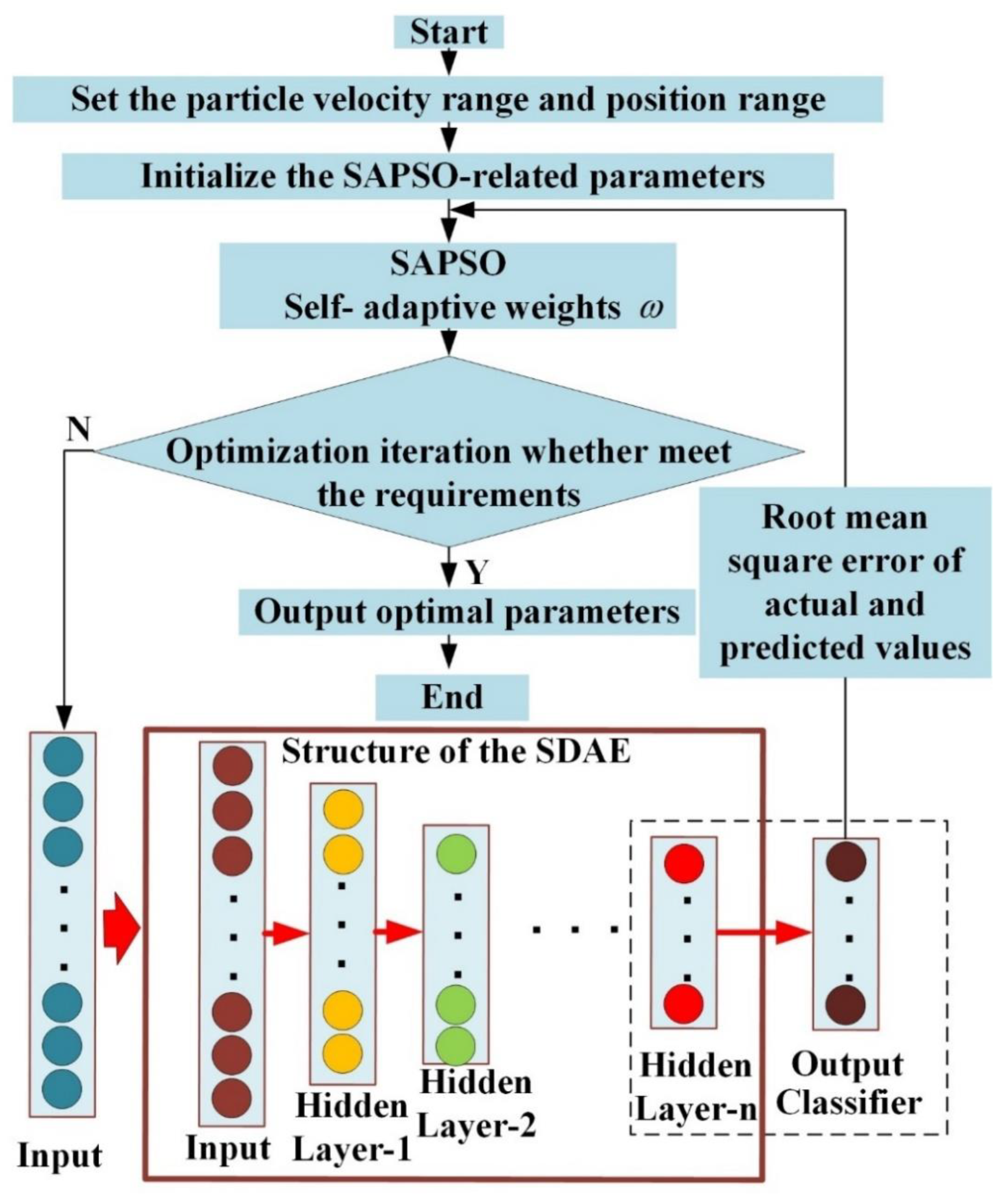
3.1.2. The Best Parameters of SDAE Are Selected via Improved PSO Optimization
3.2. Fault Diagnosis Method and Process of SAPSO-SDAE-KELM
4. Experiments and Data Pre-Processing
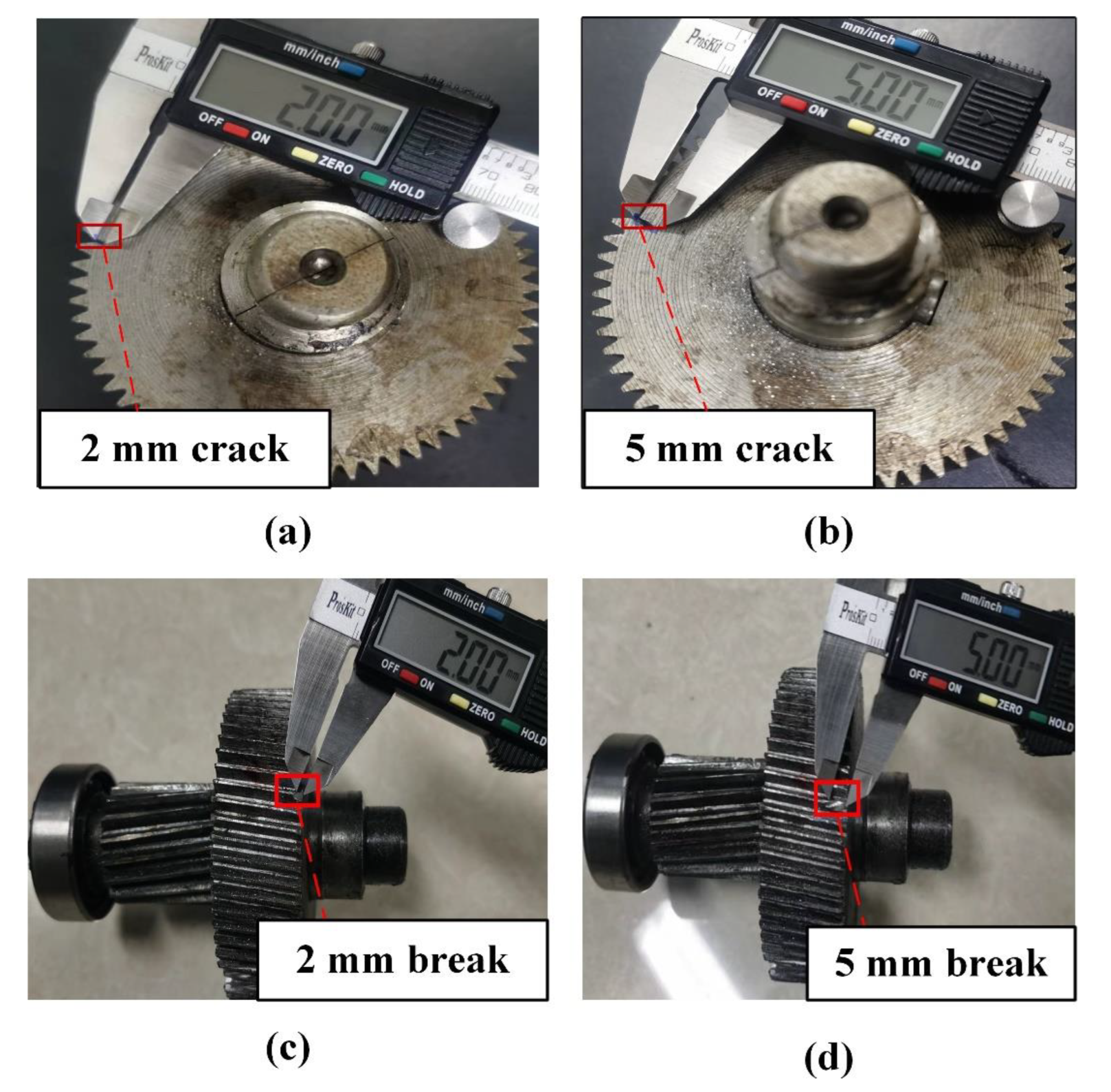
4.1. Experimental Platform
4.2. Signal Acquisition and Sample Generation
4.2.1. Signal Acquisition Scheme
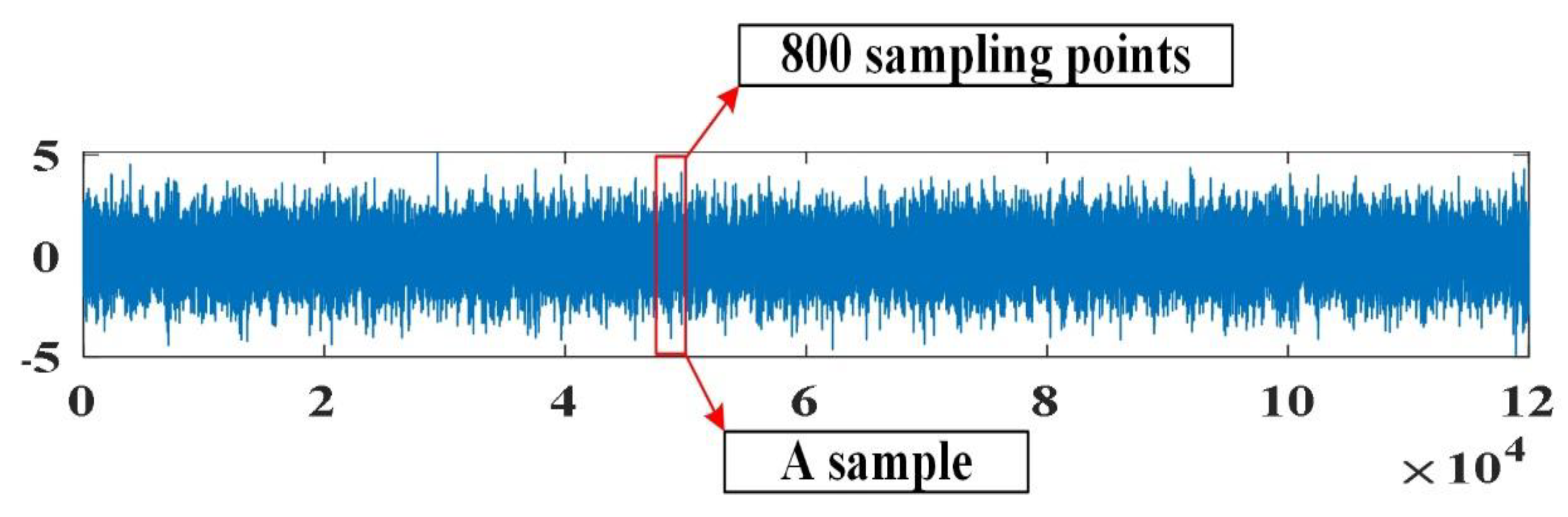
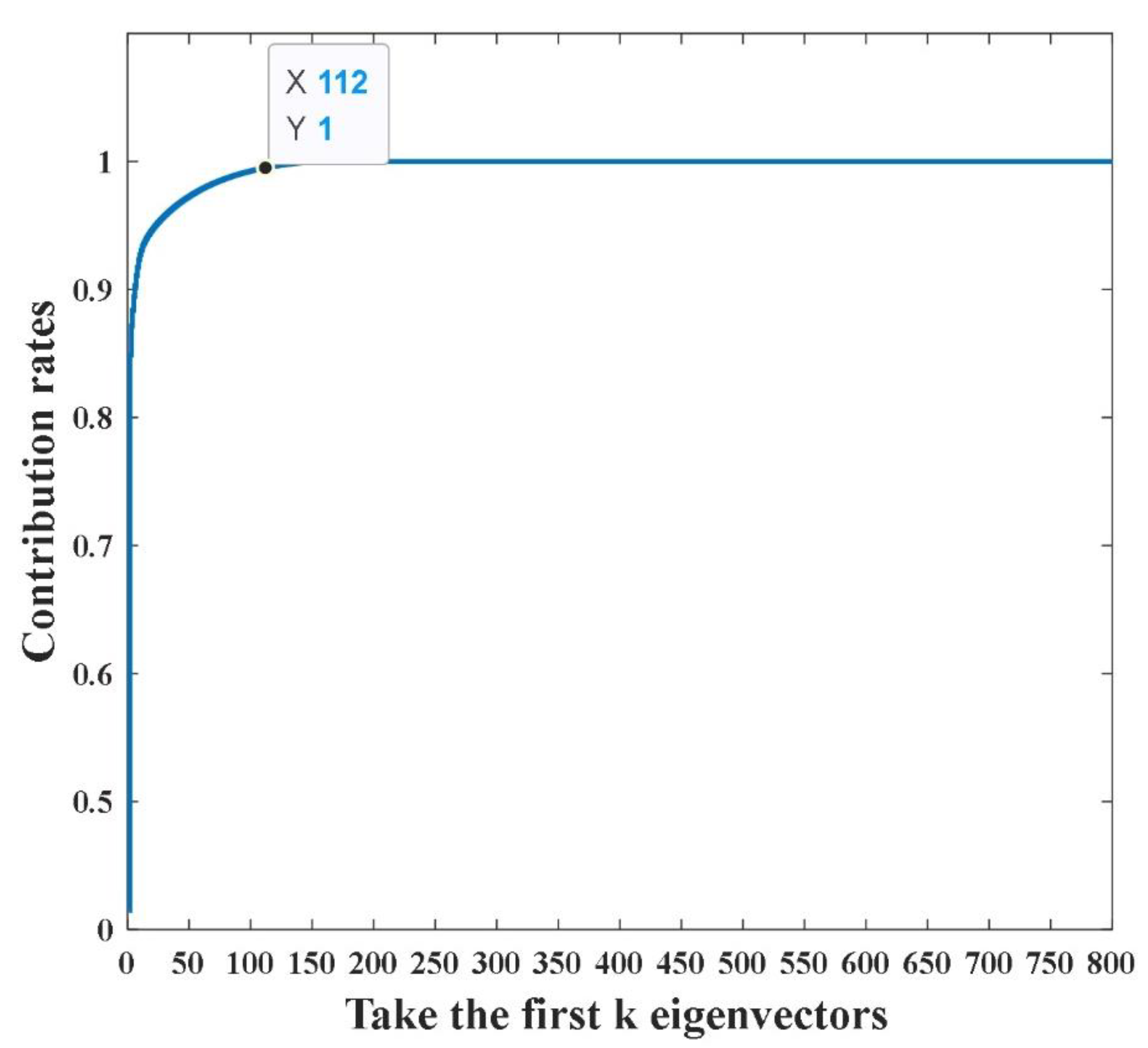
4.2.2. Sample Construction and Data Set Generation
5. Method Validation and Comparison
5.1. Comparison of Optimization Results after Particle Swarm Improvement
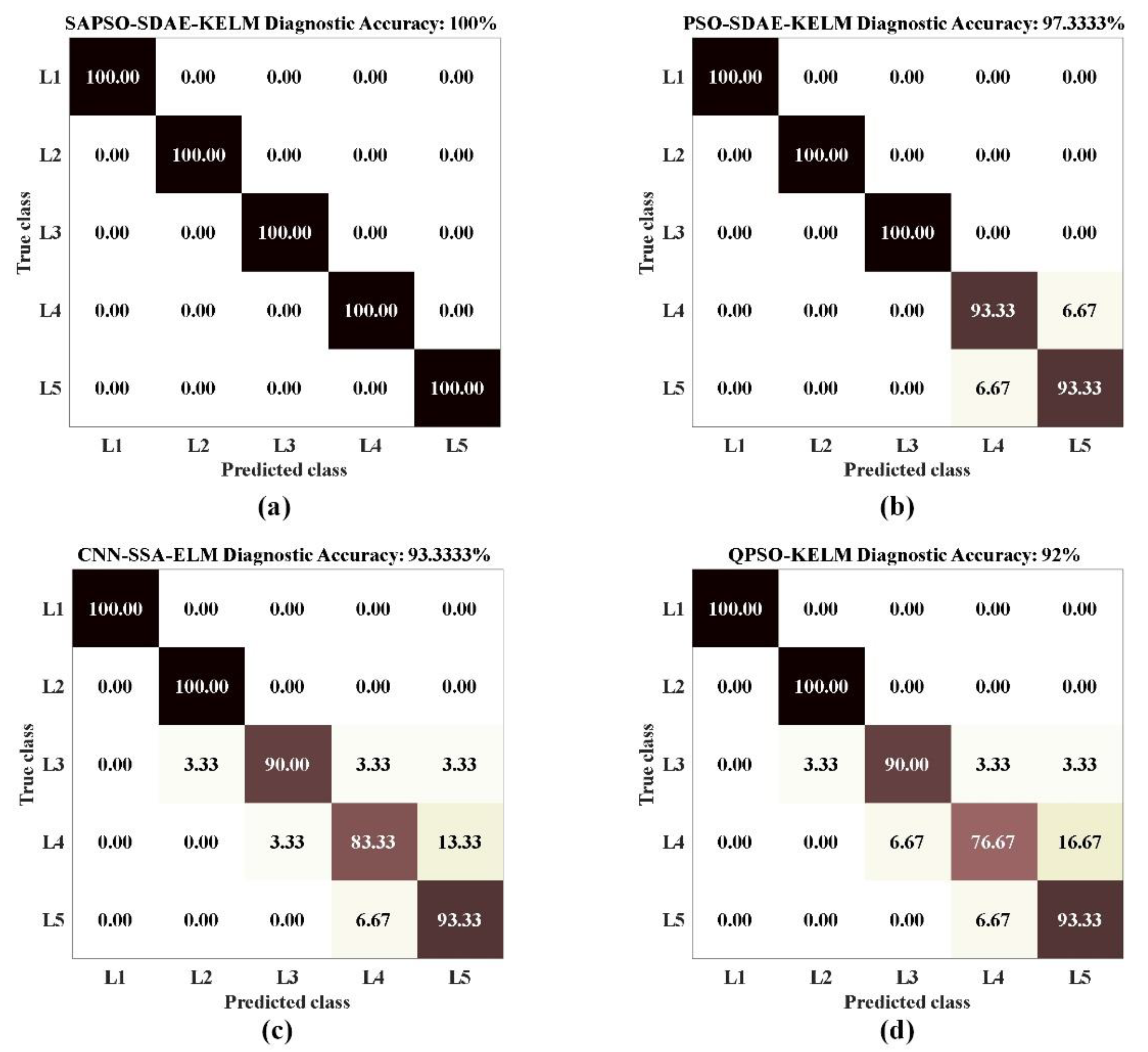
5.2. Comparison with Other Fault Diagnosis Methods
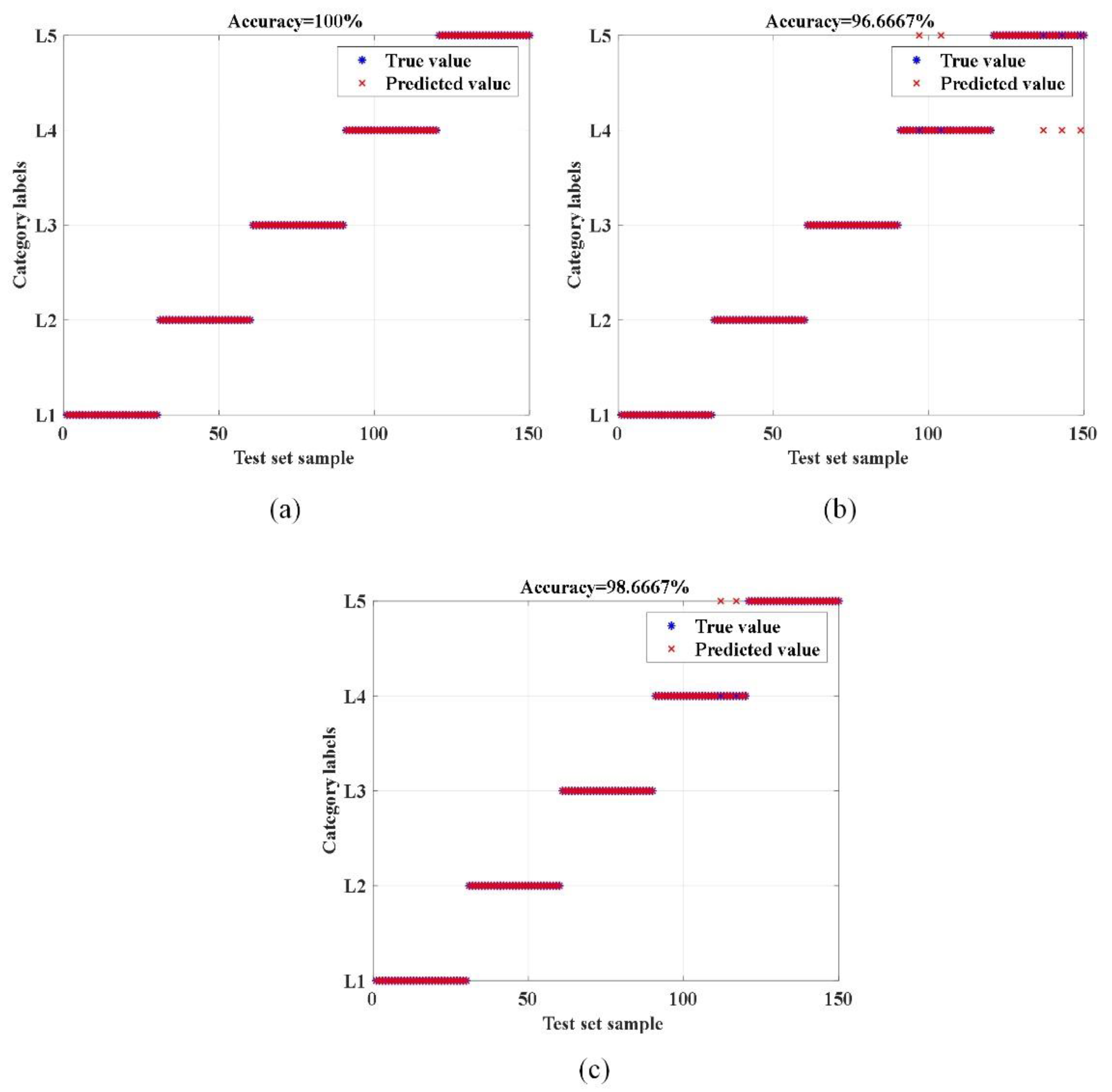
5.3. Verification of Different Signal Inputs
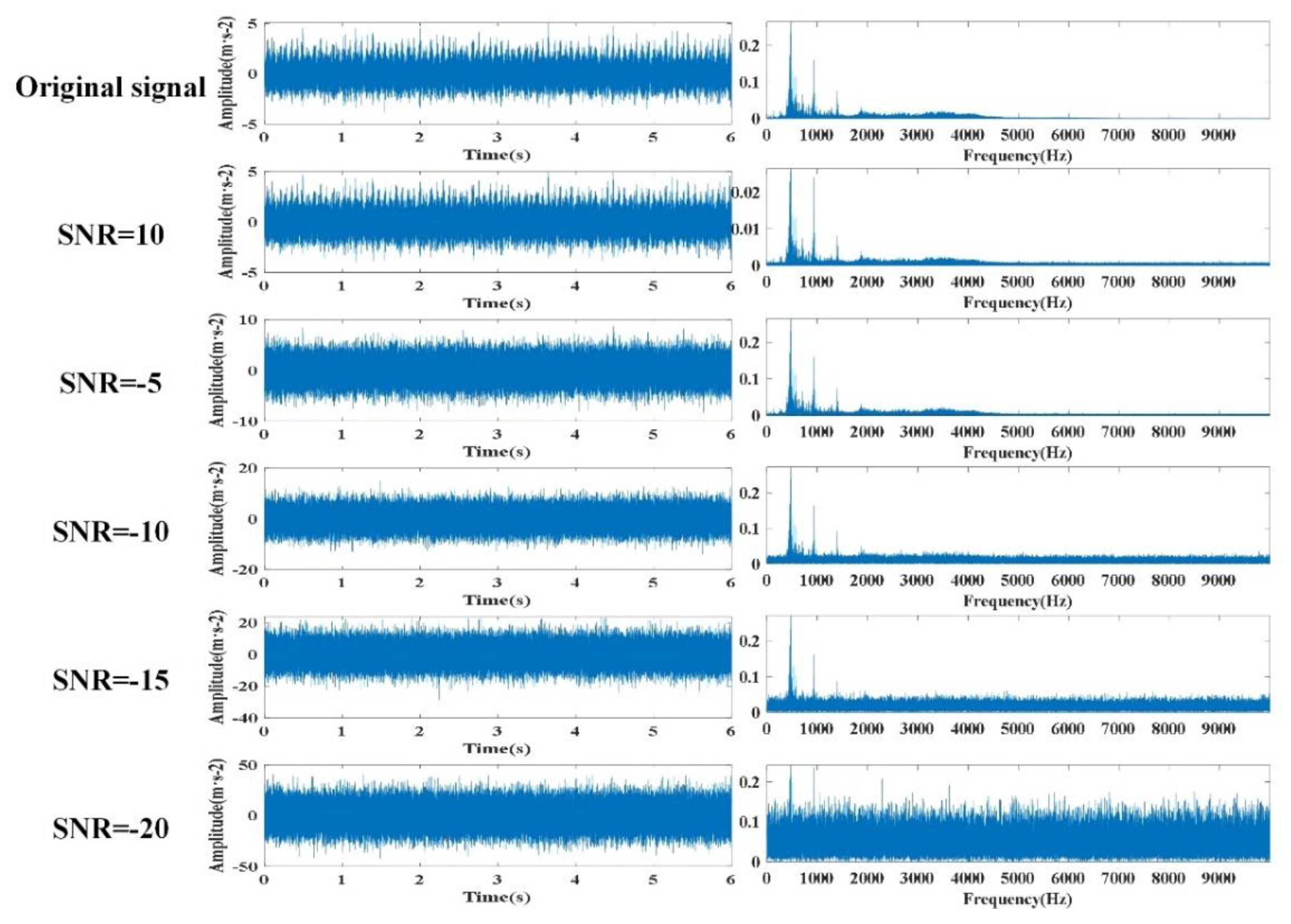
5.4. Verification of the Noise Reduction Effect
6. Conclusions
- The hyperparameters associated with the structure of the SDAE network have a significant effect on the classification effect of the model. The improved PSO was used to optimize SDAE and other parameters to realize the rapid adaptive adjustment of network structure.
- The fault diagnosis is carried out by the optimized SDAE network with different signal inputs, and the diagnosis accuracy is above 96%, which proves that the diagnosis model in this paper has good generalizability corresponding to different signal inputs.
- Through noise addition experiments, the method proposed in this paper has a high diagnostic accuracy in the presence of high noise. Compared to other diagnostic models, the method proposed in this paper has better noise immunity.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Feng, Z.; Gao, A.; Li, K.; Ma, H. Planetary gearbox fault diagnosis via rotary encoder signal analysis. Mech. Syst. Signal Process. 2021, 149, 107325. [Google Scholar] [CrossRef]
- Hendriks, J.; Dumond, P.; Knox, D.A. Towards better benchmarking using the CWRU bearing fault dataset. Mech. Syst. Signal Process. 2022, 169, 108732. [Google Scholar] [CrossRef]
- Jiang, X.; Li, S.; Wang, Y. Study on nature of crossover phenomena with application to gearbox fault diagnosis. Mech. Syst. Signal Process. 2017, 83, 272–295. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, Q.; Zi, Y.; Wu, Z. Discriminative Sparse Autoencoder for Gearbox Fault Diagnosis Toward Complex Vibration Signals. IEEE Trans. Inst. Meas. 2022, 71, 1–11. [Google Scholar] [CrossRef]
- Miao, H.; David, H. A new hybrid deep signal processing approach for bearing fault diagnosis using vibration signals. Neurocomputing 2020, 396, 542–555. [Google Scholar]
- Li, J.; Li, X.; Li, Y.; Zhang, Y.; Yang, X.; Xu, P. A New Method of Tractor Engine State Identification Based on Vibration Characteristics. Processes 2023, 11, 303. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, H.; Zeng, R.; Xia, K.; Guo, Q.; Li, Y. Fault identification method of diesel engine in light of pearson correlation coefficient diagram and orthogonal vibration signals. Math. Probl. Eng. 2019, 2019, 2837580. [Google Scholar]
- Meng, S.; Kang, J.; Chi, K.; Die, X. Gearbox fault diagnosis through quantum particle swarm optimization algorithm and kernel extreme learning machine. J. Vibroengineering 2020, 22, 1399–1414. [Google Scholar] [CrossRef]
- Zhao, N.; Zhang, J.; Ma, W.; Jiang, Z.; Mao, Z. Variational time-domain decomposition of reciprocating machine multi-impact vibration signals. Mech. Syst. Signal Process. 2022, 172, 108977. [Google Scholar] [CrossRef]
- Wang, C.; Peng, Z.; Liu, R.; Chen, C. Research on Multi-Fault Diagnosis Method Based on Time Domain Features of Vibration Signals. Sensors 2022, 22, 8164. [Google Scholar] [CrossRef]
- Dhamande, L.S.; Chaudhari, M.B. Compound gear-bearing fault feature extraction using statistical features based on time-frequency method. Measurement 2018, 125, 63–77. [Google Scholar] [CrossRef]
- Li, C.; Sánchez, R.V.; Zurita, G.; Cerrada, M.; Cabrera, D. Fault diagnosis for rotating machinery using vibration measurement deep statistical feature learning. Sensors 2016, 16, 895. [Google Scholar] [CrossRef] [Green Version]
- Yang, Q.; An, D. EMD and wavelet transform based fault diagnosis for wind turbine gear box. Adv. Mech. Eng. 2013, 5, 212836. [Google Scholar] [CrossRef]
- Yan, H.; Bai, H.; Zhan, X.; Wu, Z.; Wen, L.; Jia, X. Combination of VMD Mapping MFCC and LSTM: A New Acoustic Fault Diagnosis Method of Diesel Engine. Sensors 2022, 22, 8325. [Google Scholar] [CrossRef] [PubMed]
- Han, M.; Wu, Y.; Wang, Y.; Liu, W. Roller bearing fault diagnosis based on LMD and multi-scale symbolic dynamic information entropy. J. Mech. Sci. Technol. 2021, 35, 1993–2005. [Google Scholar] [CrossRef]
- Syed, S.H.; Muralidharan, V. Feature extraction using Discrete Wavelet Transform for fault classification of planetary gearbox—A comparative study. Appl. Acoust. 2022, 188, 108572. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Z.; Meng, F.; Zhang, Y. Fault Diagnosis of Wind Turbine Bearings Based on CNN and SSA–ELM. J. Vib. Eng. Technol. 2022, 1–17. [Google Scholar] [CrossRef]
- Gao, S.; Jiang, Z.; Liu, S. An approach to intelligent fault diagnosis of cryocooler using time-frequency image and CNN. Comput. Intell. Neurosci. 2022, 2022, 1754726. [Google Scholar] [CrossRef]
- Du, J.; Zheng, J.; Liang, Y.; Lu, X.; Klemeš, J.J.; Varbanov, P.S.; Shahzad, K.; Rashid, M.I.; Ali, A.M.; Liao, Q.; et al. A hybrid deep learning framework for predicting daily natural gas consumption. Energy 2022, 257, 124689. [Google Scholar] [CrossRef]
- Jia, N.; Cheng, Y.; Liu, Y.; Tuan, Y. Intelligent Fault Diagnosis of Rotating Machines Based on Wavelet Time-Frequency Diagram and Optimized Stacked Denoising Auto-Encoder. IEEE Sens. J. 2022, 22, 17139–17150. [Google Scholar] [CrossRef]
- Vincent, P.; Larochelle, H.; Lajoie, I.; Bengio, Y.; Manzagol, P.-A. Stacked denoising autoencoders: Learning useful representations in a deep network with a local denoising criterion. J. Mach. Learn. Res. 2010, 11, 3371–3408. [Google Scholar]
- Bengio, Y.; Courville, A.; Vincent, P. Representation learning: A review and new perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1798–1828. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, P.; Chen, J.; Zhang, H.; Li, S. A fault identification method for electric submersible pumps based on dae-svm. Shock Vib. 2022, 2022, 5868630. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Lin, Y.; Li, X. A novel method for intelligent fault diagnosis of rolling bearings using ensemble deep auto-encoders. Mech. Syst. Signal Process. 2018, 102, 278–297. [Google Scholar] [CrossRef]
- Wang, B.; Hu, T. Distributed pairwise algorithms with gradient descent methods. Neurocomputing 2019, 333, 364–373. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Han, H.; Bai, X.; Han, H.; Hou, Y.; Qiao, J. Self-adjusting multitask particle swarm optimization. IEEE Trans. Evol. Comput. 2021, 26, 145–158. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Ding, S.; Zhao, H.; Zhang, Y.; Xiu, X.; Nie, R. Extreme learning machine: Algorithm, theory and applications. Artif. Intell. Rev. 2015, 44, 103–115. [Google Scholar] [CrossRef]
- Du, X.; Jia, L.; Haq, I.U. Fault diagnosis based on SPBO-SDAE and transformer neural network for rotating machinery. Measurement 2022, 188, 110545. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Hidden Layers | 2 | 3 | 4 | 5 |
|---|---|---|---|---|
| Pearson’s Coefficient | 0.983 | 0.996 | 0.976 | 0.978 |
| RMSE | 0.0125 | 0.0093 | 0.0392 | 0.0534 |
| Diagnostic Accuracy | 99.33% | 100.0% | 98.0% | 96.67% |
| Fault Status | Sampling Frequency | Sampling Time | Input Speed | Number of Sensors | Load Currents |
|---|---|---|---|---|---|
| normal | 20,000 Hz | 6 s | 1200 r/min | 2 | 1 A |
| 2 mm crack | 20,000 Hz | 6 s | 1200 r/min | 2 | 1 A |
| 5 mm crack | 20,000 Hz | 6 s | 1200 r/min | 2 | 1 A |
| 2 mm break | 20,000 Hz | 6 s | 1200 r/min | 2 | 1 A |
| 5 mm break | 20,000 Hz | 6 s | 1200 r/min | 2 | 1 A |
| Fault Status | Labels | Training Sets | Testing Sets |
|---|---|---|---|
| normal | L1 | 120 × 112 | 30 × 112 |
| 2 mm crack | L2 | 120 × 112 | 30 × 112 |
| 5 mm crack | L3 | 120 × 112 | 30 × 112 |
| 2 mm break | L4 | 120 × 112 | 30 × 112 |
| 5 mm break | L5 | 120 × 112 | 30 × 112 |
| Labels | SAPSO-SDAE-KELM | PSO-SDAE-KELM | CNN-SSSA-ELM | QPSO-KELM |
|---|---|---|---|---|
| L1 | 100.0% | 100.0% | 100.0% | 100.0% |
| L2 | 100.0% | 100.0% | 100.0% | 100.0% |
| L3 | 100.0% | 100.0% | 90.0% | 90.0% |
| L4 | 100.0% | 93.33% | 83.33% | 76.67% |
| L5 | 100.0% | 93.33% | 90.33% | 93.33% |
| Diagnostic time | 8.71 s | 14.62 s | 10.33 s | 12.76 s |
| Accuracy | 100.0% | 97.33% | 93.33% | 92.0% |
| Feature Types | Extracted Features | Number of Features |
|---|---|---|
| Time domain feature | 1 maximum value, 2 minimum value, 3 peak–peak value, 4 mean value, 5 mean square value, 6 root mean square (RMS), 7 average amplitude, 8 root amplitude, 9 variance, 10 standard deviation, 11 peak value, 12 kurtosis, 13 skewness, 14 energy, 15 peak factor, 16 pulse factor, 17 waveform factor, 18 margin factor, 19 clearance factor. | 19 |
| Frequency domain feature | 1 frequency mean value, 2 frequency center, 3 root mean square frequency, 4 frequency standard deviation. | 4 |
| Input Signals | Number of Nodes in the Hidden Layer | Learning Rate | Noise Addition Rates | Number of Iterations |
|---|---|---|---|---|
| Time domain signals | 69-55-46 | 0.6 | 0.3 | 600 |
| Frequency domain signals | 56-42-34 | 0.4 | 0.1 | 300 |
| Feature signals | 15-11-6 | 0.5 | 0.1 | 200 |
| SNR (db) | Diagnostic Accuracy | |||
|---|---|---|---|---|
| SAPSO-SDAE-KELM | PSO-SDAE-KELM | CNN-SSSA-ELM | QPSO-KELM | |
| 10 | 100.0% | 100.0% | 100.0% | 100.0% |
| −5 | 99.33% | 98.67% | 96.0% | 94.67% |
| −10 | 98.67% | 97.33% | 91.33% | 90.0% |
| −15 | 98.00% | 96.67% | 88.67% | 85.33% |
| −20 | 97.33% | 95.33% | 84.67% | 82.67% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Yan, H.; Zhan, X.; Wen, L.; Jia, X. Gearbox Fault Diagnosis Based on Optimized Stacked Denoising Auto Encoder and Kernel Extreme Learning Machine. Processes 2023, 11, 1936. https://doi.org/10.3390/pr11071936
Wu Z, Yan H, Zhan X, Wen L, Jia X. Gearbox Fault Diagnosis Based on Optimized Stacked Denoising Auto Encoder and Kernel Extreme Learning Machine. Processes. 2023; 11(7):1936. https://doi.org/10.3390/pr11071936
Chicago/Turabian StyleWu, Zhenghao, Hao Yan, Xianbiao Zhan, Liang Wen, and Xisheng Jia. 2023. "Gearbox Fault Diagnosis Based on Optimized Stacked Denoising Auto Encoder and Kernel Extreme Learning Machine" Processes 11, no. 7: 1936. https://doi.org/10.3390/pr11071936
APA StyleWu, Z., Yan, H., Zhan, X., Wen, L., & Jia, X. (2023). Gearbox Fault Diagnosis Based on Optimized Stacked Denoising Auto Encoder and Kernel Extreme Learning Machine. Processes, 11(7), 1936. https://doi.org/10.3390/pr11071936