




Disturbance-Suppression Method of Direct-Driven PMSG-Based Wind Power System in Microgrids

Abstract
:1. Introduction
- (1)
- The mathematical model of the DPMSG-based WPS is carried out based on the circuit topology and the control strategy.
- (2)
- The angular frequency is calculated from the changing phase, and the accurate control of WPS is realized. Then, the command current value under unbalanced conditions is derived by the instantaneous power equation.
- (3)
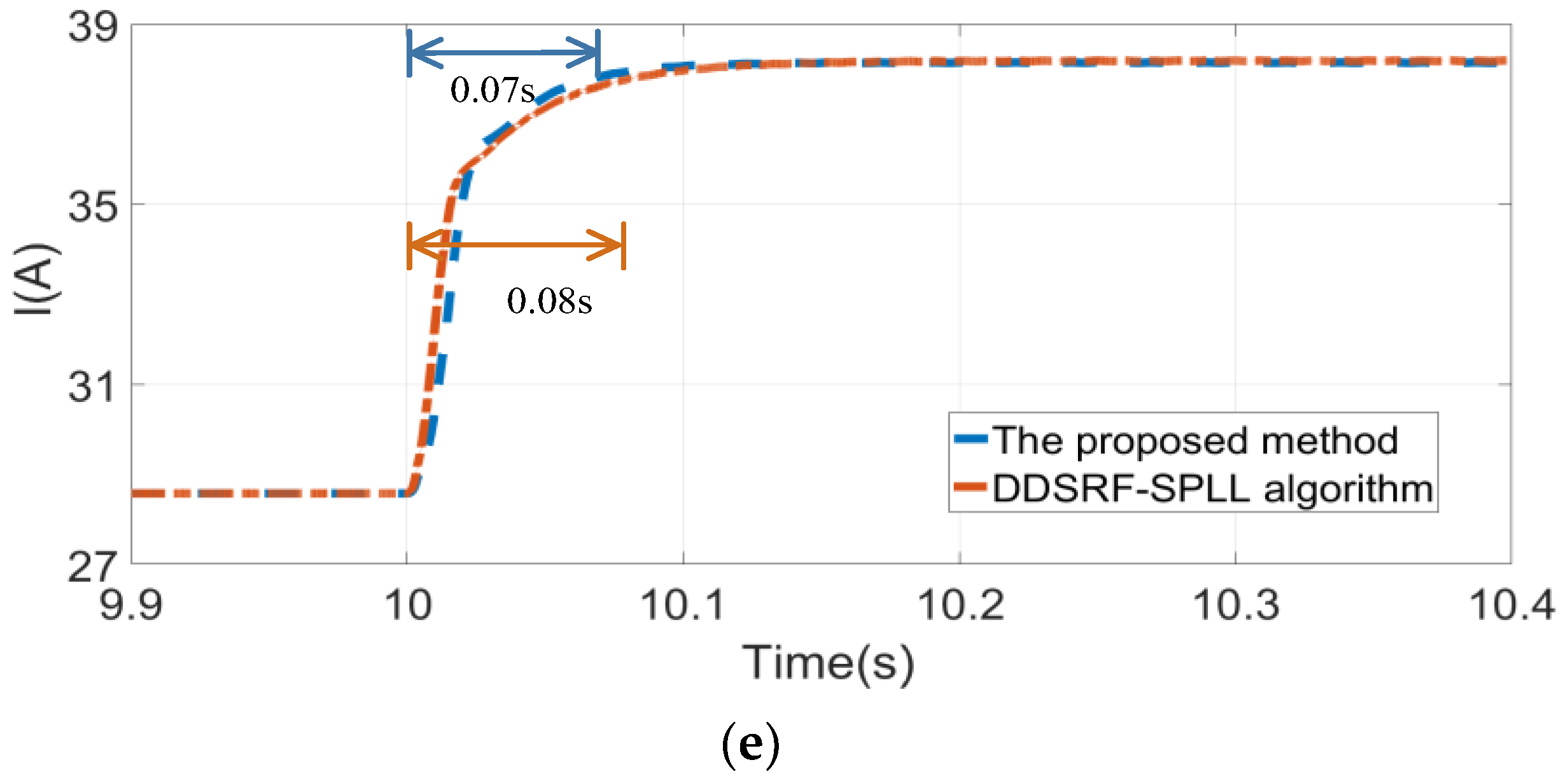
- This method can significantly improve the compensation capabilities, avoids the parameter design problem of the phase-locked loop, and has a faster response speed.
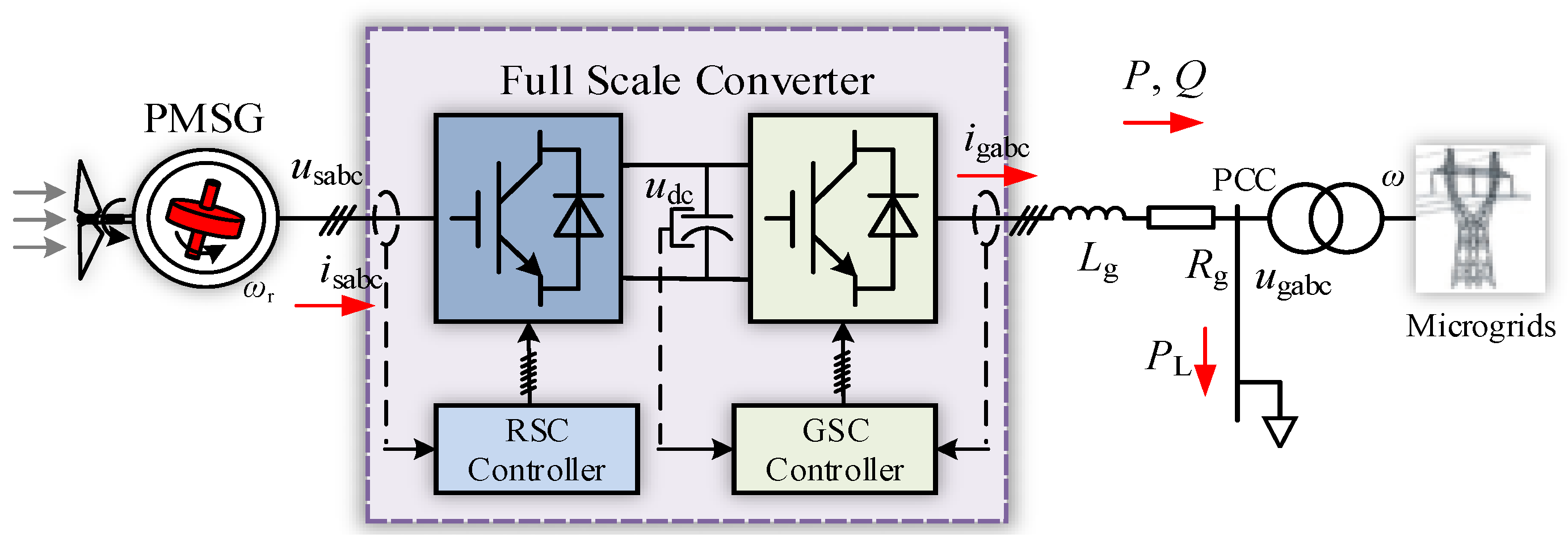
2. DPMSG-Based WPS
2.1. Mathematical Models of Wind Turbine and DPMSG
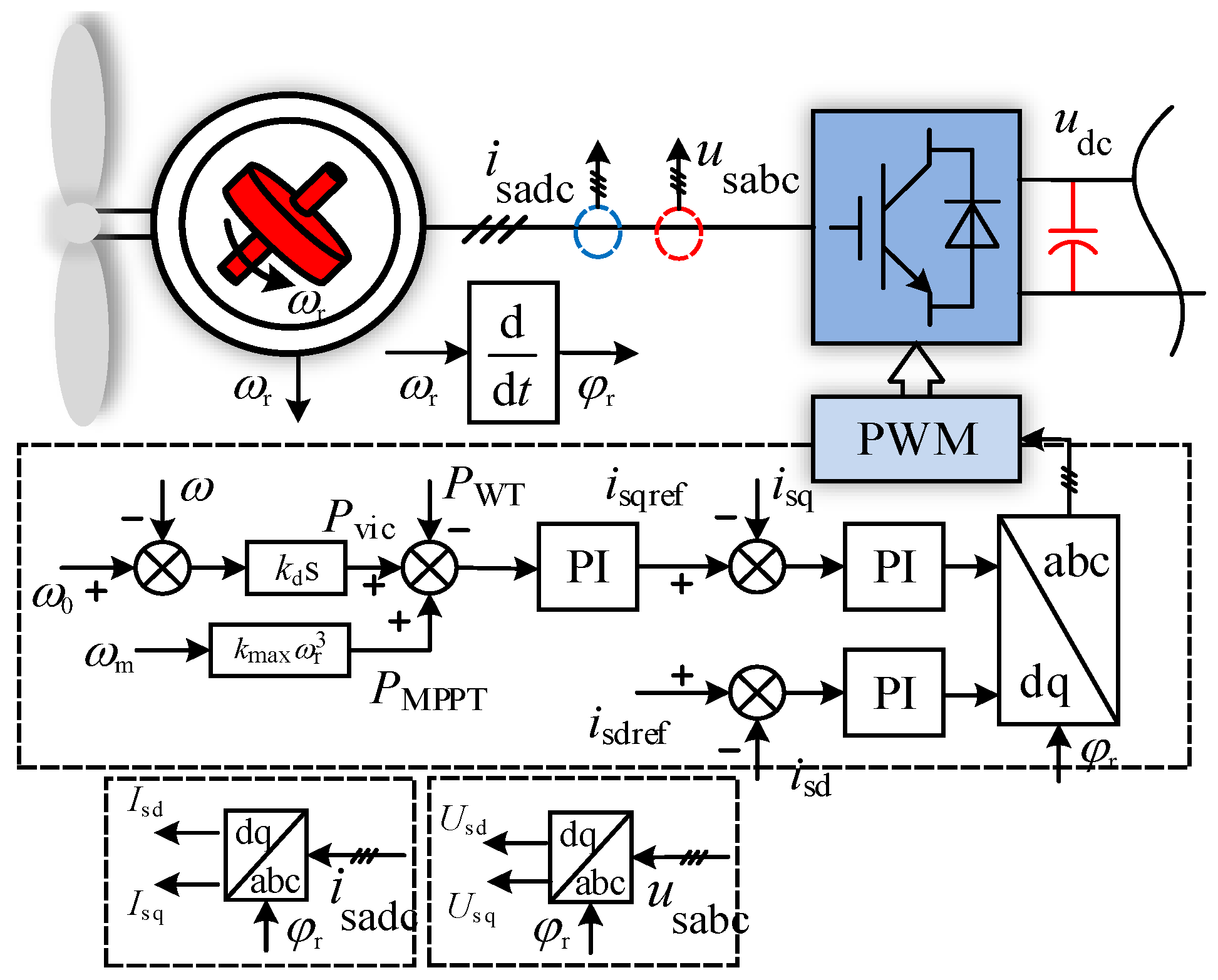
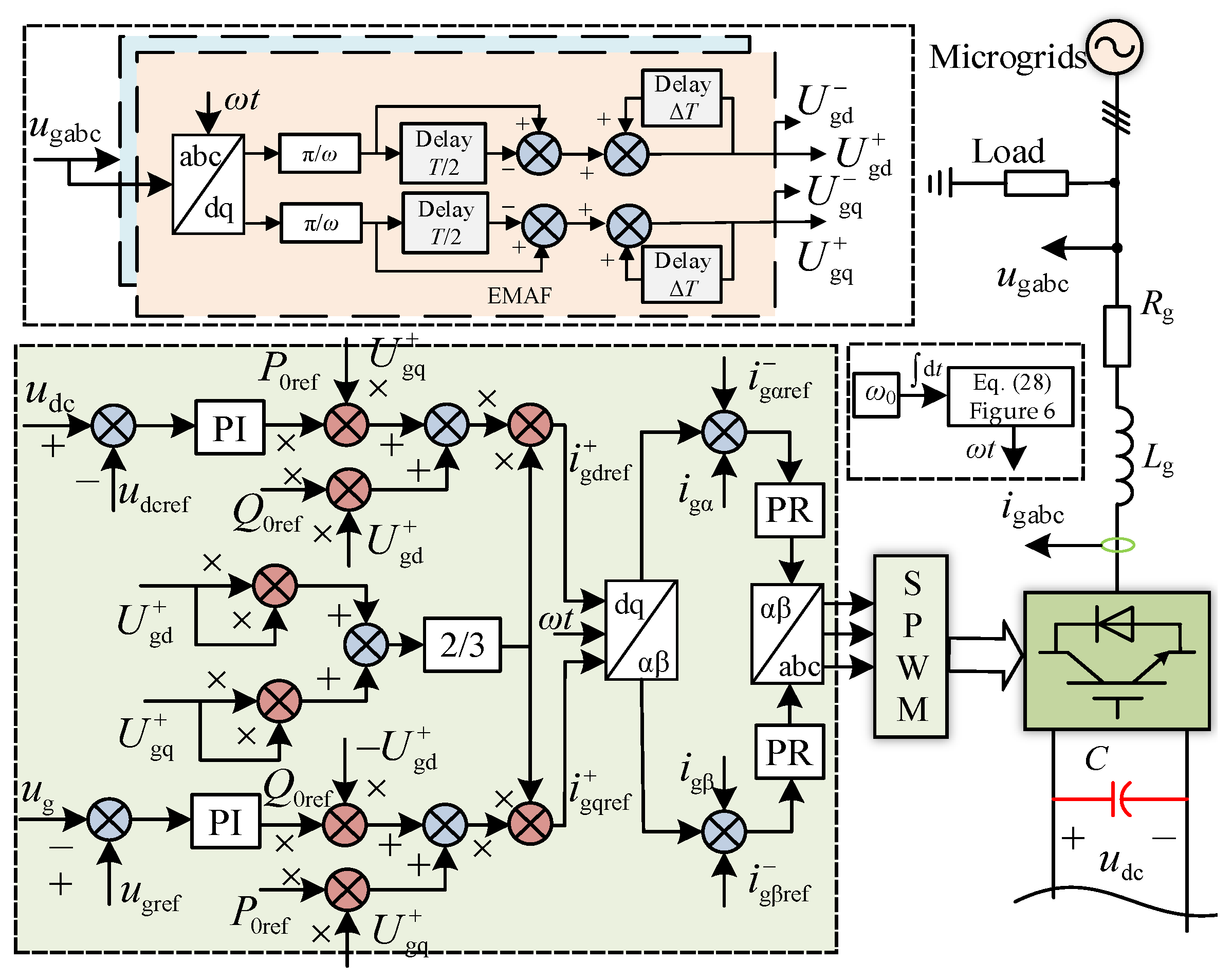
2.2. Circuit Topology and Control Strategy of Wind Turbine Side Converter
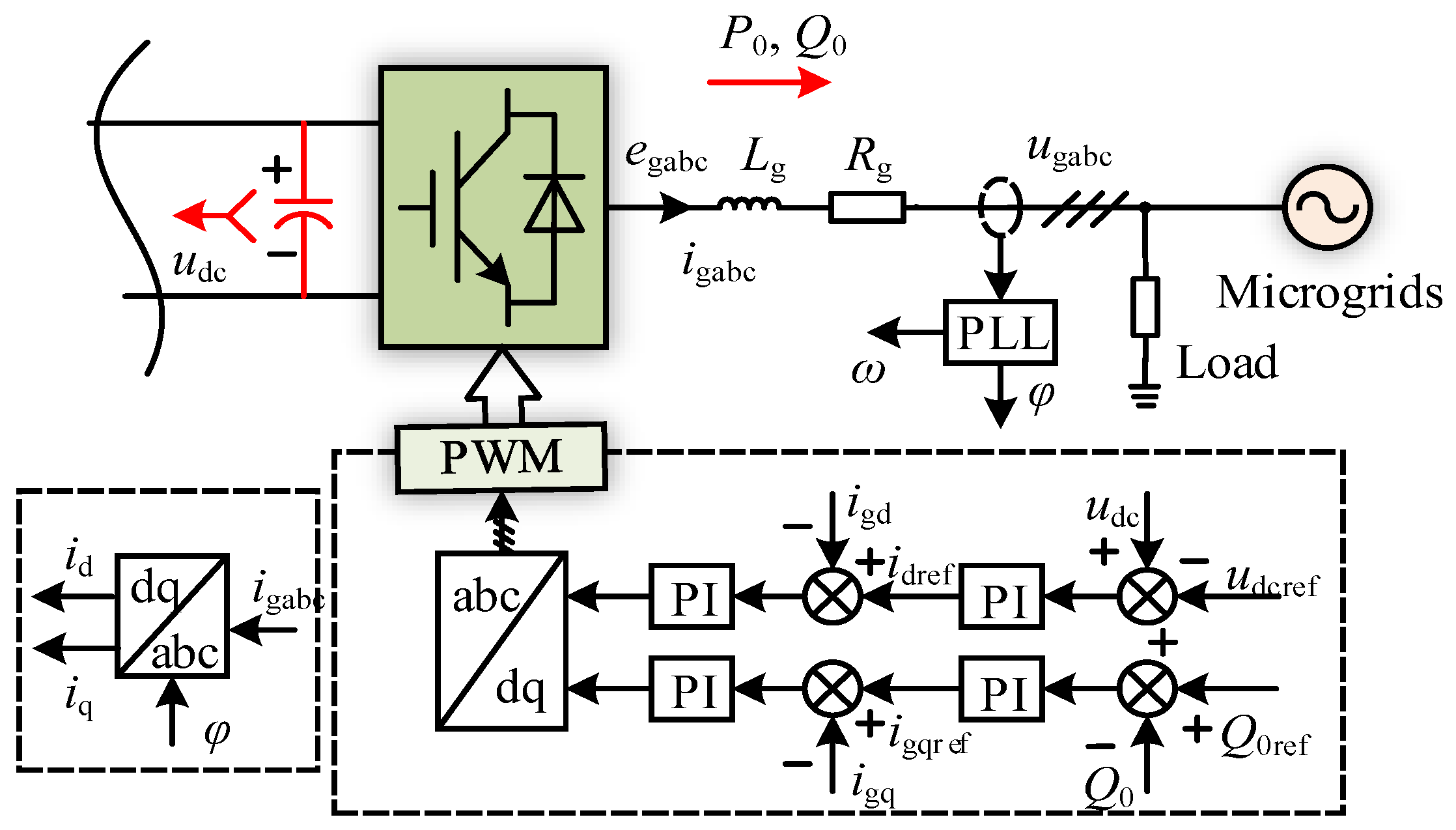
2.3. Circuit Topology and Control Strategy of Grid Side Converter
3. Synchronous Information Detection Algorithm in Microgrid
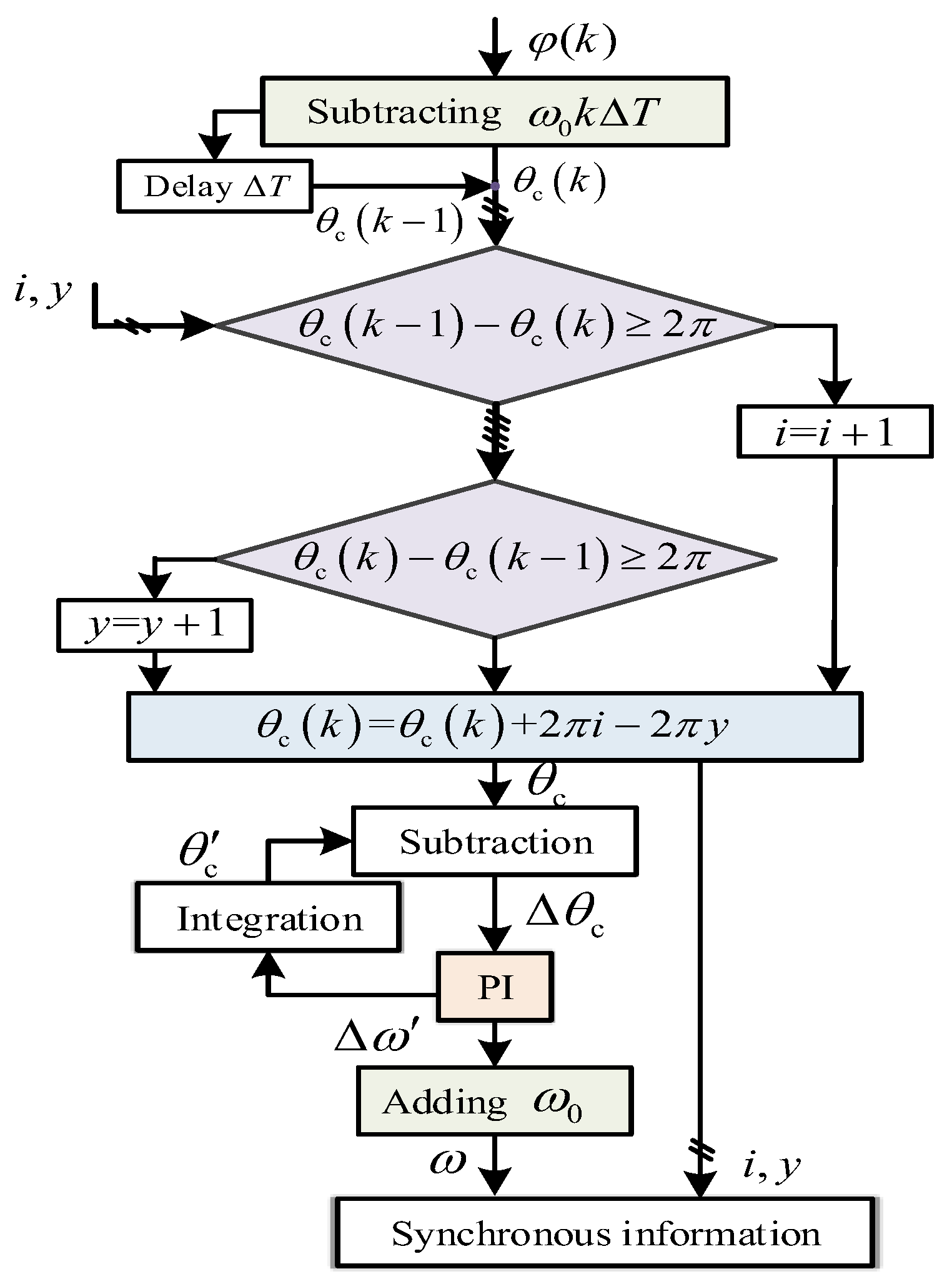
3.1. Detection Principle
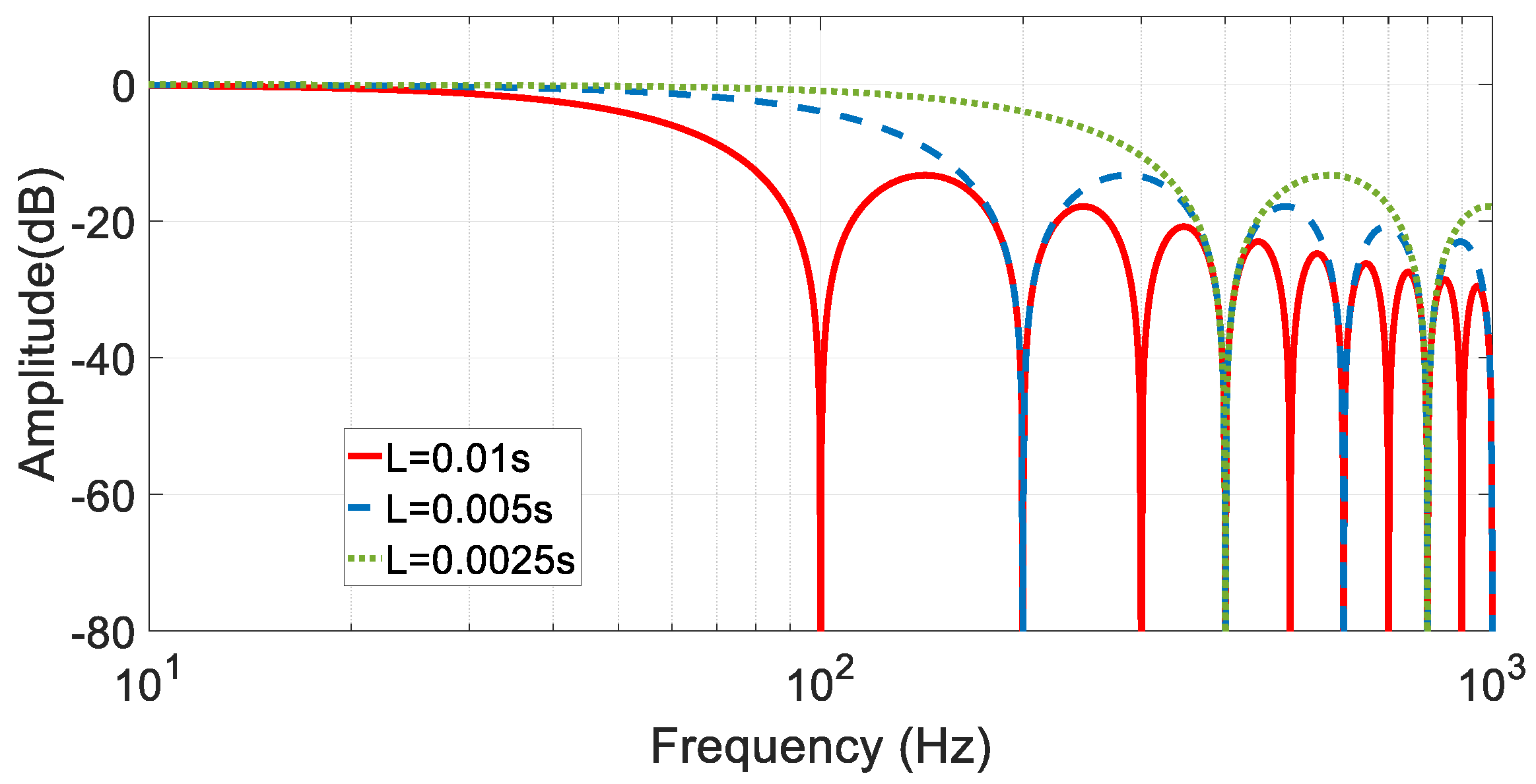
3.2. Fast Detection Algorithm
4. Disturbance-Suppression Method for Microgrids
5. Verification of Disturbance-Suppression Method
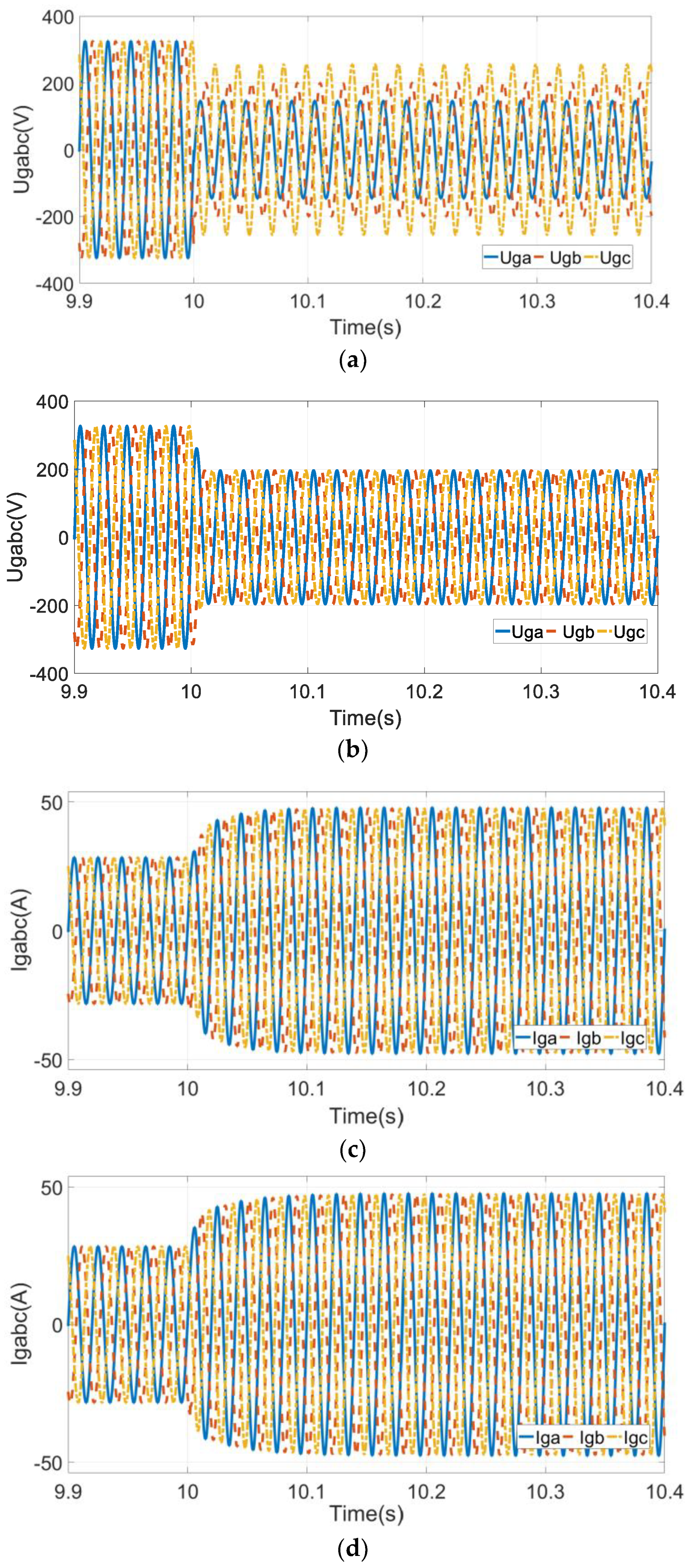
5.1. Simulation Verification
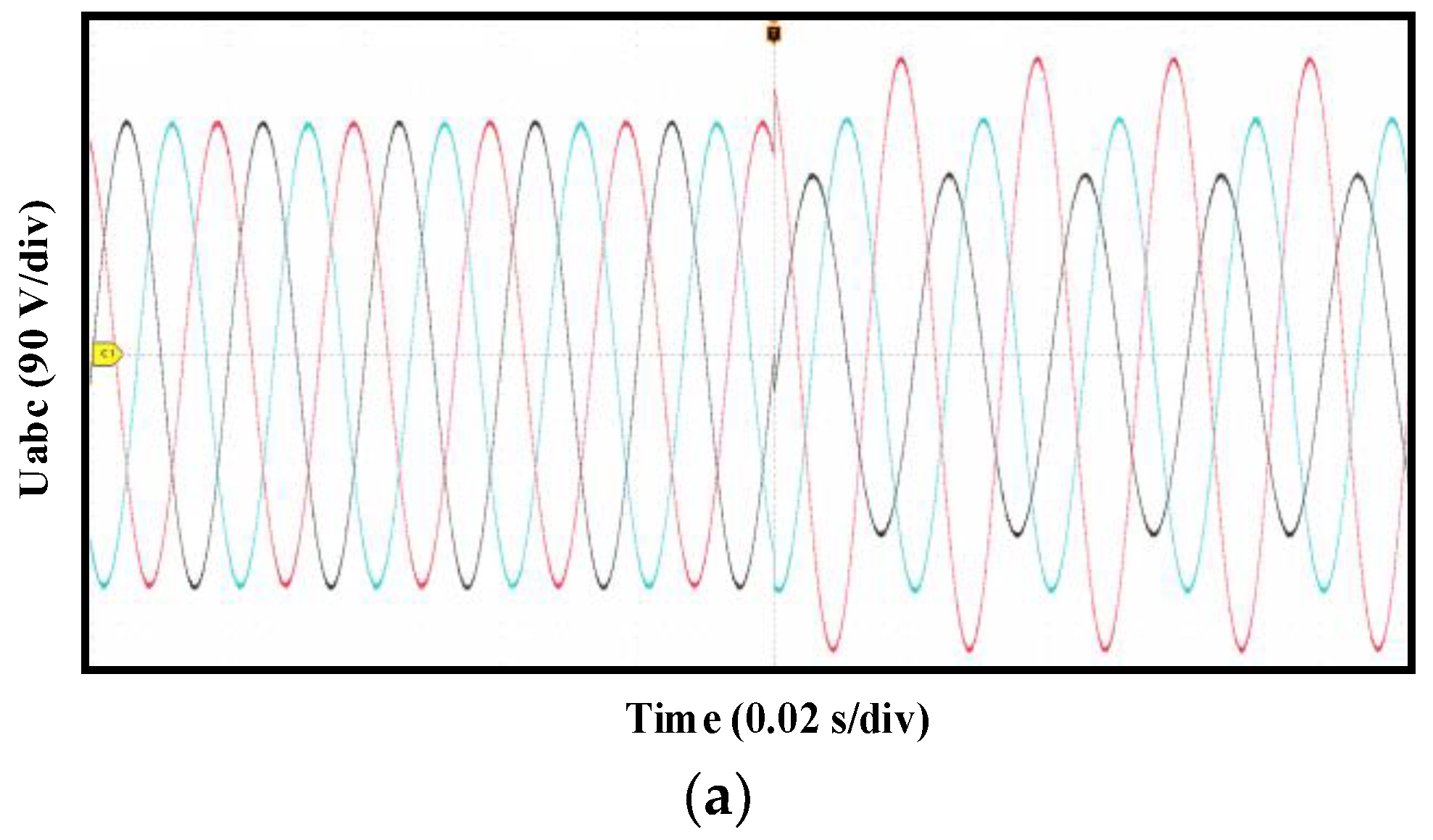
5.2. RT-LAB Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DPMSG | Direct-driven Permanent Magnet Synchronous Generator |
| WPS | Wind Power System |
| DDSRF-PLL | Decoupled Double Synchronous Reference Frame Phase-Locked Loop |
| MPPT | Maximum Power Point Tracking |
| Nomenclatures | |
| ω | Real-time angular frequency of microgrid |
| ωr | Wind turbine speed |
| isabc | Stator current |
| udc | Capacitor voltage |
| igabc | Output current of grid-side converter |
| Lg, Rg | Equivalent inductance and resistance |
| PL | Power consumed by the load |
| P, Q | Active and reactive power of DPMSG-based WPS |
| S | Area of fan blade |
| ρ, v | Air density and wind speed |
| δ, λ | Pitch angle and tip speed ratio |
| Cp(δ, λ) | Utilization coefficient of wind energy |
| R | Impeller radius of wind turbine |
| Ψf | Rotor flux linkage of DPMSG |
| esd, esq | Stator terminal voltage in dq frame |
| Rs | Stator winding resistance |
| Lsd, Lsq | Inductances of direct and quadrature axis |
| PWT | Output power of wind turbine |
| Pvic | Virtual inertia power command |
| PMPPT | MPPT power command |
| ud, uq | Terminal voltage of wind turbine side converter in dq frame |
| kd | Virtual inertia control coefficient |
| kmax | Coefficient maximizing captured wind energy |
| egd, egq | Output voltage of grid side converter |
| Ugd, Ugq | Microgrid voltage in dq frame |
| udcref | Capacitor voltage command |
| kp, ki | Proportional and integral coefficients of capacitor voltage control |
| α, β | Initial phases of positive and negative sequence components |
| Um+, Um− | Amplitudes of positive and negative sequence components |
| L | Sliding period |
| θmn, Umn | Initial phase and amplitude of nth harmonic |
| Am | Transient amplitude coefficient |
| Bm | Steady-state amplitude coefficient |
| N | Magnification of sliding period |
| ω0 | Constant angular frequency |
| Zx | Compensation phase |
| θc | Changing phase |
| Kp, Ki | Proportional and integral coefficients of angular frequency control |
| P0, Q0 | Constant components of active and reactive power |
| P1, Q1 | Amplitudes of active and reactive sinusoidal components |
| P2, Q2 | Amplitudes of active and reactive cosine components |
References
- Maihemuti, S.; Wang, W.; Wu, J.; Wang, H.; Muhedaner, M.; Zhu, Q. New Energy Power System Dynamic Security and Stability Region Calculation Based on AVURPSO-RLS Hybrid Algorithm. Processes 2023, 11, 1269. [Google Scholar] [CrossRef]
- Kaur, P.; Chaturvedi, K.T.; Kolhe, M.L. Economic Dispatch of Combined Heat and Power Plant Units within Energy Network Integrated with Wind Power Plant. Processes 2023, 11, 1232. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, K.; Zhang, G.; Xie, T.; Wen, J.; Feng, C.; Ben, W. The Bi-Level Optimization Model Research for Energy-Intensive Load and Energy Storage System Considering Congested Wind Power Consumption. Processes 2022, 10, 51. [Google Scholar] [CrossRef]
- Yan, Z.; Xu, Y. A Hybrid Data-Driven Method for Fast Solution of Security-Constrained Optimal Power Flow. IEEE Trans. Power Syst. 2022, 37, 4365–4374. [Google Scholar] [CrossRef]
- Loulijat, A.; Chojaa, H.; El Marghichi, M.; Ettalabi, N.; Hilali, A.; Mouradi, A.; Abdelaziz, A.Y.; Elbarbary, Z.M.S.; Mossa, M.A. Enhancement of LVRT Ability of DFIG Wind Turbine by an Improved Protection Scheme with a Modified Advanced Nonlinear Control Loop. Processes 2023, 11, 1417. [Google Scholar] [CrossRef]
- Zhang, D.; Wu, Y.; Xiong, L.; Zhao, C. Analysis of Inertia Characteristics of Direct-Drive Permanent-Magnet Synchronous Generator in Micro-Grid. Energies 2019, 12, 3141. [Google Scholar] [CrossRef] [Green Version]
- Coban, H.H.; Rehman, A.; Mousa, M. Load Frequency Control of Microgrid System by Battery and Pumped-Hydro Energy Storage. Water 2022, 14, 1818. [Google Scholar] [CrossRef]
- Binbing, W.; Yizhi, T.; Yuxi, C.; Abuduwayiti, X.; Xiong, L. Virtual Frequency Construction-Based Vector Current Control for Grid-Tied Inverter under Imbalanced Voltage. IEEE Access 2020, 8, 199654–199663. [Google Scholar] [CrossRef]
- Guediri, A.; Hettiri, M.; Guediri, A. Modeling of a Wind Power System Using the Genetic Algorithm Based on a Doubly Fed Induction Generator for the Supply of Power to the Electrical Grid. Processes 2023, 11, 952. [Google Scholar] [CrossRef]
- Liu, X.; Wu, B.; Xiu, L. A Fast Positive-Sequence Component Extraction Method with Multiple Disturbances in Unbalanced Conditions. IEEE Trans. Power Electron. 2022, 37, 8820–8824. [Google Scholar] [CrossRef]
- Chao, W.; Deng, C.; Huang, J.; Dai, L.; Min, Y.; Cheng, Y.; Wang, Y.; Liao, J. A Sub-Synchronous Oscillation Suppression Strategy Based on Active Disturbance Rejection Control for Renewable Energy Integration System via MMC-HVDC. Electronics 2023, 12, 2885. [Google Scholar] [CrossRef]
- Jiang, P.; Zhang, T.; Geng, J.; Wang, P.; Fu, L. An MPPT Strategy for Wind Turbines Combining Feedback Linearization and Model Predictive Control. Energies 2023, 16, 4244. [Google Scholar] [CrossRef]
- Chen, J.; Duan, W.; Yang, X.; Zhang, L.; Shan, Y.; Yang, B.; Shu, H.; An, N.; Yu, T. Overall Adaptive Controller Design of PMSG under Whole Wind Speed Range: A Perturbation Compensation Based Approach. Processes 2019, 7, 732. [Google Scholar] [CrossRef] [Green Version]
- Mayilsamy, G.; Palanimuthu, K.; Venkateswaran, R.; Antonysamy, R.P.; Lee, S.R.; Song, D.; Joo, Y.H. A Review of State Estimation Techniques for Grid-Connected PMSG-Based Wind Turbine Systems. Energies 2023, 16, 634. [Google Scholar] [CrossRef]
- Xiong, L.; Liu, X.; Zhao, C.; Zhuo, F. A Fast and Robust Real-Time Detection Algorithm of Decaying DC Transient and Harmonic Components in Three-Phase Systems. IEEE Trans. Power Electron. 2020, 35, 3332–3336. [Google Scholar] [CrossRef]
- Xiu, L.; He, J.; Li, M. Fast and Stable Detection Scheme of Point of Common Coupling Voltage for Renewable Energy Systems Tied to Distortion Grids. IEEE Trans. Ind. Inform. 2023, 19, 7876–7884. [Google Scholar] [CrossRef]
- Xiong, L.; Zhuo, F.; Wang, F.; Liu, X.; Zhu, M.; Yi, H. A Quantitative Evaluation and Comparison of Harmonic Elimination Algorithms Based on Moving Average Filter and Delayed Signal Cancellation in Phase Synchronization Applications. J. Power Electron. 2016, 16, 717–730. [Google Scholar] [CrossRef] [Green Version]
- Ademi, S.; Jovanovic, M. High-Efficiency Control of Brushless Doubly-Fed Machines for Wind Turbines and Pump Drives. Energy Convers. Manag. 2014, 81, 120–132. [Google Scholar] [CrossRef]
- Bergna, G.; Berne, E.; Egrot, P.; Lefranc, P.; Arzande, A.; Vannier, J.-C.; Molinas, M. An Energy-Based Controller for HVDC Modular Multilevel Converter in Decoupled Double Synchronous Reference Frame for Voltage Oscillation Reduction. IEEE Trans. Ind. Electron. 2013, 60, 2360–2371. [Google Scholar] [CrossRef]
- Xiu, L.; Du, Z.; Wu, B.; Li, G.; Wang, D.; Song, H. A Novel Adaptive Frequency Extraction Method for Fast and Accurate Connection between Inverters and Microgrids. Energy 2021, 221, 119795. [Google Scholar] [CrossRef]
- Svensson, J. Synchronization Methods for Grid-Connected Voltage Source Converter. Gener. Transm. Distrib. IEE Proc. 2001, 148, 229–235. [Google Scholar] [CrossRef] [Green Version]
- Xiong, L.; Zhuo, F.; Wang, F.; Liu, X.; Zhu, M. A Fast Orthogonal Signal-Generation Algorithm Characterized by Noise Immunity and High Accuracy for Single-Phase Grid. IEEE Trans. Power Electron. 2016, 31, 1847–1851. [Google Scholar] [CrossRef]
- Ahmed, S.; Gouichiche, A.; Verma, A.; Su, C.-L.; Zakaria, C.; Messlem, Y.; Berkouk, E.M. Open Loop Synchronization Techniques Benchmarking for Distributed Energy Sources Connection. IEEE Access 2022, 10, 63554–63566. [Google Scholar] [CrossRef]
- Xiu, L.; Du, Z.; Li, M.; Du, L.; Hao, J.; Kang, Z. A Practical and Fast Sequence Components Detection Scheme for Three-Phase Unbalanced Grid Voltage. Int. J. Electr. Power Energy Syst. 2021, 125, 106385. [Google Scholar] [CrossRef]
- Alassaf, A.; Alsaleh, I.; Alateeq, A.; Alafnan, H. Grid-Following Inverter-Based Resource: Numerical State–Space Modeling. Sustainability 2023, 15, 8400. [Google Scholar] [CrossRef]
- Guerrero-Bermúdez, O.D.; Martinez, S.; Molina, E.; Candelo-Becerra, J.E. Comparison of Phase-Locked Loops Used for Frequency Measurements in a Low-Inertia Power Grid with Wind Generation. Electronics 2022, 11, 3226. [Google Scholar] [CrossRef]
- Sabo, A.; Kolapo, B.Y.; Odoh, T.E.; Dyari, M.; Abdul Wahab, N.I.; Veerasamy, V. Solar, Wind and Their Hybridization Integration for Multi-Machine Power System Oscillation Controllers Optimization: A Review. Energies 2023, 16, 24. [Google Scholar] [CrossRef]
- Sun, D.-Y.; Qian, Z.-J.; Shen, W.-Q.; Zhou, K.; Jin, N.-Z.; Chen, Q.-G. Mechanism Analysis of Multiple Disturbance Factors and Study of Suppression Strategies of DFIG Grid-Side Converters Caused by Sub-Synchronous Oscillation. Electronics 2023, 12, 2293. [Google Scholar] [CrossRef]
- Bany Issa, M.A.; Al Muala, Z.A.; Bello Bugallo, P.M. Grid-Connected Renewable Energy Sources: A New Approach for Phase-Locked Loop with DC-Offset Removal. Sustainability 2023, 15, 9550. [Google Scholar] [CrossRef]
- Zhou, L.; Han, W.; Qi, J.; Zhou, Z. Adaptive PI + VPI Harmonic Current Compensation Strategy under Weak Grid Conditions. Appl. Sci. 2023, 13, 5983. [Google Scholar] [CrossRef]
- Mishra, M.K.; Lal, V.N. An Enhanced Control Strategy to Mitigate Grid Current Harmonics and Power Ripples of Grid-Tied PV System without PLL under Distorted Grid Voltages. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 4587–4602. [Google Scholar] [CrossRef]
- Xiong, L.; Wu, B.; Liu, X.; Xiu, L.; Wang, D. PLL-Free Voltage Oriented Control Strategy for Voltage Source Converters Tied to Unbalanced Utility Grids. Front. Energy Res. 2022, 9, 796261. [Google Scholar] [CrossRef]
- Lin, F.-J.; Tan, K.-H.; Lai, Y.-K.; Luo, W.-C. Intelligent PV Power System with Unbalanced Current Compensation Using CFNN-AMF. IEEE Trans. Power Electron. 2019, 34, 8588–8598. [Google Scholar] [CrossRef]
- Maganti, S.; Padhy, N.P. A Feedback-Based Flexible Compensation Strategy for a Weak-Grid-Tied Current-Controlled Converter under Unbalanced and Harmonic Conditions. IEEE Trans. Ind. Appl. 2022, 58, 7739–7753. [Google Scholar] [CrossRef]
- Naidu, T.A.; Arya, S.R.; Maurya, R. Multiobjective Dynamic Voltage Restorer with Modified EPLL Control and Optimized PI-Controller Gains. IEEE Trans. Power Electron. 2019, 34, 2181–2192. [Google Scholar] [CrossRef]
- Andrew, E.T.; Ahmed, K.H.; Holliday, D. A New Model Predictive Current Controller for Grid-Connected Converters in Unbalanced Grids. IEEE Trans. Power Electron. 2022, 37, 9175–9186. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Studied Issues | Generating Sources | Contribution |
|---|---|---|---|
| [25] | Amplitude, phase, frequency and unbalance | Grid | A PLL state-space model for addressing grid unbalance problems is developed. |
| [26] | Amplitude and phase | Wind/Grid | The impact of different PLL configurations on the WPS is studied. |
| [27] | Amplitude and phase | PV/Wind/Grid | Various technical solutions with the renewable energy sources are also reviewed. |
| [28] | Amplitude, phase and frequency | Windr/Grid | A comprehensive strategy for oscillation suppression is proposed based on the resonance controller. |
| [24] | Amplitude, phase and unbalance | PV/Wind/Grid | A fast detection algorithm for unbalanced voltage is proposed. |
| [29] | Amplitude, phase and frequency | PV/Wind/Grid | This algorithm solves the problems of frequency mutation and voltage offset. |
| [30] | Amplitude, phase, frequency and unbalance | PV/Wind/Grid | This algorithm based on the adaptive lattice notch filters improves the detection accuracy. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Xiu, L.; He, J.; Gong, R. Disturbance-Suppression Method of Direct-Driven PMSG-Based Wind Power System in Microgrids. Processes 2023, 11, 2189. https://doi.org/10.3390/pr11072189
Xu X, Xiu L, He J, Gong R. Disturbance-Suppression Method of Direct-Driven PMSG-Based Wind Power System in Microgrids. Processes. 2023; 11(7):2189. https://doi.org/10.3390/pr11072189
Chicago/Turabian StyleXu, Xiuqi, Liancheng Xiu, Jingxuan He, and Rongxin Gong. 2023. "Disturbance-Suppression Method of Direct-Driven PMSG-Based Wind Power System in Microgrids" Processes 11, no. 7: 2189. https://doi.org/10.3390/pr11072189
APA StyleXu, X., Xiu, L., He, J., & Gong, R. (2023). Disturbance-Suppression Method of Direct-Driven PMSG-Based Wind Power System in Microgrids. Processes, 11(7), 2189. https://doi.org/10.3390/pr11072189