
The Process of Developing Model Research for the Technology of Obtaining Energy Resources

 , , ,
, , , 

Abstract
:1. Introduction
2. Materials and Methods
2.1. Modelling Dynamical Systems
- x—the position of the mass m (the length of the spring);
- —the acceleration of the mass;
- k—constant related to the stiffness of the spring;
- g—gravitational constant.
2.2. Procedure for Modelling the Work of a Hydraulic Prop of Powered Roof Support
- the module of elasticity, density and viscosity of the liquid does not change during the system’s operation;
- the effect of gravity on the operation of the system is omitted;
- deformations of hydraulic components are omitted;
- it is assumed that there is no cavitation in the system;
- it is assumed that there is no dry friction between the moving elements;
- the propagation effect of the finite velocity propagation of disturbances in the system is omitted.
3. Results
3.1. Mathematical Model of the Hydraulic Prop
- Fsb—the force of inertia;
- Fst—the friction force;
- Fsh—the force acting on the piston.
- mtł—the mass of the piston;
- x—the displacement of the piston;
- fs—the coefficient of friction;
- ppt(t)—the pressure in the subpiston space of the prop in time;
- A—the surface area of the piston.
3.2. Equation of Flow Rates
- Q—the flow rate of the liquid that flows into the cylinder;
- Qs—the flow rate associated with the movements of the piston;
- Qc—the flow rate associated with the compressibility of the liquid.
- A—the surface area of the piston;
- x(t)—the displacement of the piston in time;
- xp—the beginning position of the piston;
- B—the bulk modulus of hydraulic fluid;
- ppt—the pressure in the subpiston space of the prop.
3.3. Numerical Solution and Implementation
- if x^_(t + 1) ≤ 0, then we set x_(t + 1) = 0 and y_(t + 1) = {0, y^_(t + 1)};
- if x^_(t + 1) ≥ x_gr, then we set x_(t + 1) = x_gr and y_(t + 1) = {0, y^_(t + 1)}.
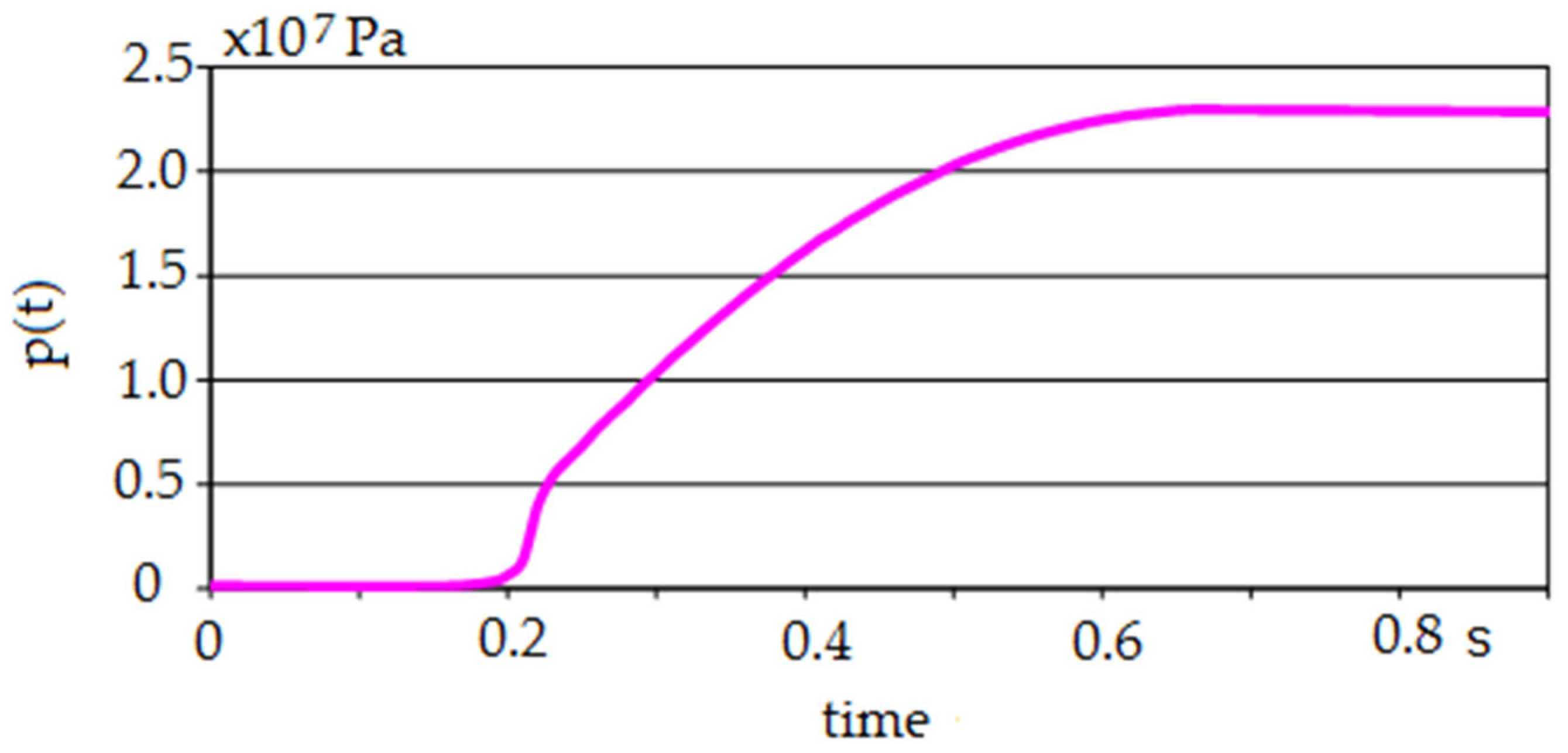
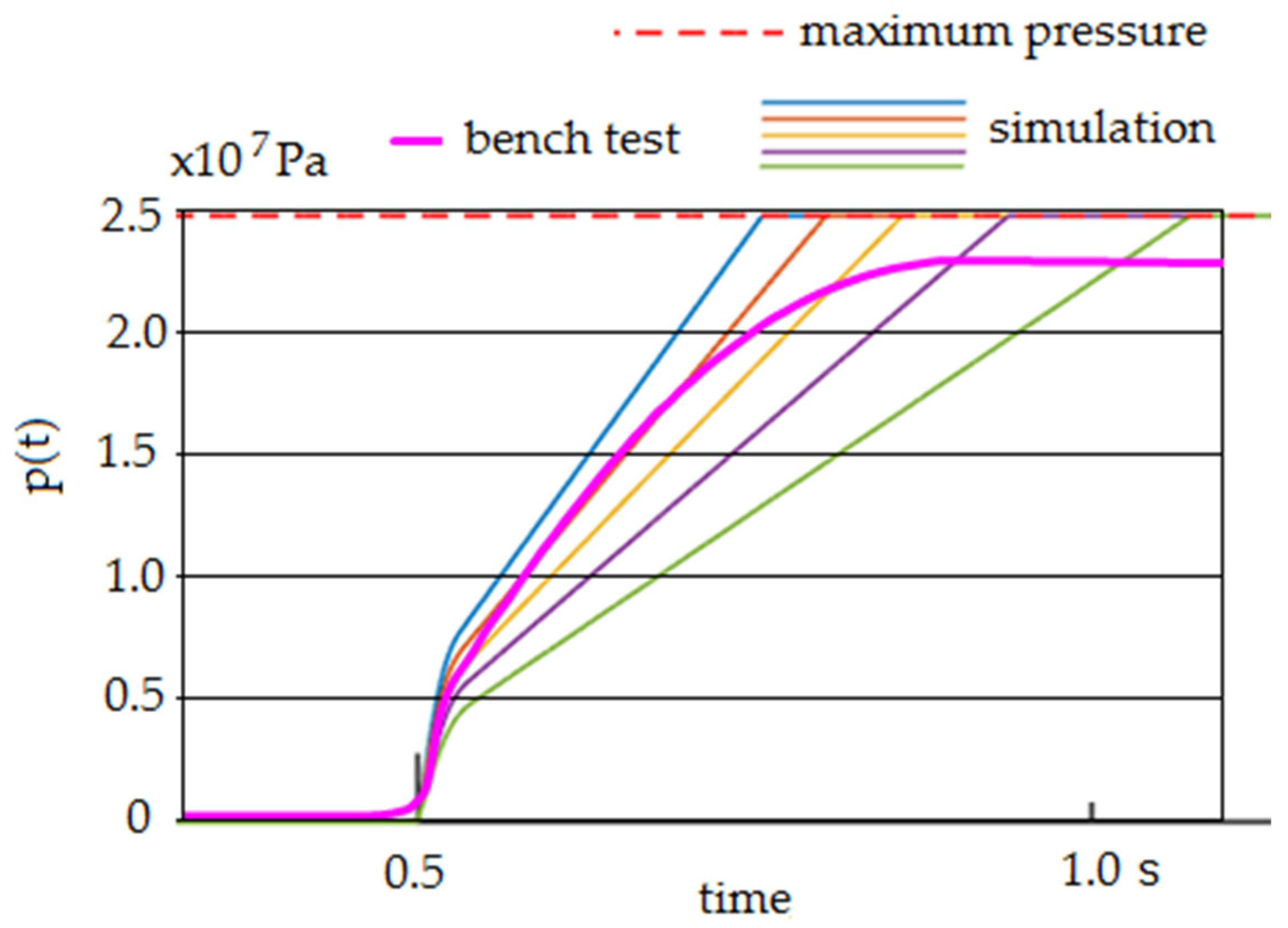
3.4. Results from Numerical Simulations
4. Discussion
5. Conclusions
- (1)
- Based on the design objectives adopted for the simulation, the work profile can be determined at the stage of creating a new prototype of the powered roof support.
- (2)
- The simulations defined the change in the piston’s position, the piston’s speed and the pressure change in the prop’s subpiston space.
- (3)
- The mathematical model and the simulation quickly assessed whether the accepted objectives for the powered roof support were confirmed.
- (4)
- The mathematical model developed is interdisciplinary; the three groups working on a new powered roof support design drew essential conclusions, which were helpful to one another.
- (5)
- Mathematical modelling and conducting simulation research in an interdisciplinary team increases the chance of prototype success based on verifying accepted objectives.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Xu, J.; Zhu, W.; Li, Y. Roof pre-blasting to prevent support crushing and water inrush accidents. Int. J. Min. Sci. Technol. 2012, 22, 379–384. [Google Scholar] [CrossRef]
- Bajda, M.; Błażej, R.; Hardygóra, M. Optimizing splice geometry in multiply conveyor belts with respect to stress in adhesive bonds. Min. Sci. 2018, 25, 195–206. [Google Scholar] [CrossRef]
- Gładysiewicz, L.; Król, R.; Kisielewski, W.; Kaszuba, D. Experimental determination of belt conveyors artificial friction coefficient. Acta Montan. Slovaca 2017, 22, 206–214. [Google Scholar]
- Peng, S.S.; Feng, D.; Cheng, J.; Yang, L. Automation in U.S. longwall coal mining: A state-of-the-art review. Int. J. Min. Sci. Technol. 2019, 29, 151–159. [Google Scholar] [CrossRef]
- Ralston, J.C.; Reid, D.C.; Dunn, M.T.; Hainsworth, D.W. Longwall automation: Delivering enabling technology to achieve safer and more productive underground mining. Int. J. Min. Sci. Technol. 2015, 25, 865–876. [Google Scholar] [CrossRef]
- Hu, S.; Ma, L.; Guo, J.; Yang, P. Support-surrounding rock relationship and top-coal movement laws in large dip angle fully-mechanized caving face. Int. J. Min. Sci. Technol. 2018, 28, 533–539. [Google Scholar]
- Ralston, J.C.; Hargrave, C.O.; Dunn, M.T. Longwall automation: Trends, challenges and opportunities. Int. J. Min. Sci. Technol. 2017, 27, 733–739. [Google Scholar] [CrossRef]
- Oggeri, C.; Oreste, P. Tunnel Static Behavior Assessed by a Probabilistic Approach to the Back-Analysis. Am. J. Appl. Sci. 2012, 9, 1137–1144. [Google Scholar]
- Buyalich, G.; Buyalich, K.; Byakov, M. Factors Determining the Size of Sealing Clearance in Hydraulic Legs of Powered Supports. E3S Web Conf. 2017, 21, 3018. [Google Scholar] [CrossRef] [Green Version]
- Kumar, R.; Singh, A.K.; Mishra, A.K.; Singh, R. Underground mining of thick coal seams. Int. J. Min. Sci. Technol. 2015, 25, 885–896. [Google Scholar] [CrossRef]
- Jixiong, Z.; Spearing, A.J.S.; Xiexing, M.; Shuai, G.; Qiang, S. Green coal mining technique integrating mining-dressing-gas draining-backfilling-mining. Int. J. Min. Sci. Technol. 2017, 27, 17–27. [Google Scholar]
- Babyr, N.V.; Korolev, A.I.; Neupokoeva, T.V. Enhancement of powered cleaning equipment with the view of mining and geological conditions. IOP Conf. Ser. Earth Environ. Sci. 2018, 194, 032004. [Google Scholar] [CrossRef]
- Buevich, V.V.; Gabov, V.V.; Zadkov, D.A.; Vasileva, P.A. Adaptation of the mechanized roof support to changeable rock pressure. Eurasia Min. 2015, 2, 11–14. [Google Scholar] [CrossRef]
- Gabov, V.V.; Zadkov, D.A.; Stebnev, A.V. Evaluation of structure and variables within performance rating of hydraulically powered roof support legs with smooth roof control. Eurasia Min. 2016, 2, 37–40. [Google Scholar] [CrossRef]
- Klishin, V.I.; Klishin, S.V. Coal Extraction from Thick Flat and Steep Beds. J. Min. Sci. 2010, 46, 149–159. [Google Scholar] [CrossRef]
- Zhu, Z.; Wu, Y.; Liang, Z. Mining-Induced Stress and Ground Pressure Behavior Characteristics in Mining a Thick Coal Seam With Hard Roofs. Front. Earth Sci. 2022, 10, 843191. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Z. Systematic principles of surrounding rock control in longwall mining within thick coal seams. Int. J. Min. Sci. Technol. 2019, 29, 591–598. [Google Scholar] [CrossRef]
- Ji, Y.; Zhang, Y.; Huang, Z.; Shao, Z.; Gao, Y. Theoretical analysis of support stability in large dip angle coal seam mined with fully-mechanized top coal caving. Min. Sci. 2020, 27, 73–87. [Google Scholar]
- Babyr, N.; Babyr, K. To improve the contact adaptability of mechanical roof support. In E3S Web of Conferences; EDP Sciences: Les Ulis, France, 2021; Volume 266, p. 03015. [Google Scholar]
- Ji, Y.; Ren, T.; Wynne, P.; Wan, Z.; Zhaoyang, M.; Wang, Z. A comparative study of dust control practices in Chinese and Australian longwall coal mines. Int. J. Min. Sci. Technol. 2016, 25, 687–706. [Google Scholar] [CrossRef]
- Baiul, K.; Khudyakov, A.; Vashchenko, S.; Krot, P.V.; Solodka, N. The experimental study of compaction parameters and elastic after-effect of fine fraction raw materials. Min. Sci. 2020, 27, 7–18. [Google Scholar] [CrossRef]
- Khayrutdinov, M.M.; Golik, V.I.; Aleksakhin, A.V.; Trushina, E.V.; Lazareva, N.V.; Aleksakhina, Y.V. Proposal of an Algorithm for Choice of a Development System for Operational and Environmental Safety in Mining. Resources 2022, 11, 88. [Google Scholar] [CrossRef]
- Gabov, V.V.; Zadkov, D.A.; Babyr, N.V.; Xie, F. Nonimpact rock pressure regulation with energy recovery into the hydraulic system of the longwall powered support. Eurasia Min. 2021, 36, 55–59. [Google Scholar] [CrossRef]
- Juganda, A.; Strebinger, C.; Brune, J.F.; Bogin, G.E. Discrete modeling of a longwall coal mine gob for CFD simulation. Int. J. Min. Sci. Technol. 2020, 30, 463–469. [Google Scholar] [CrossRef]
- Jayanthu, S. Strata control problems of underground coal mining vis-à-vis geotechnical instrumentation and numerical model studies. J. Eng. Geol. 2014, 39, 2. [Google Scholar]
- Hebda-Sobkowicz, J.; Gola, S.; Zimroz, R.; Wyłomańska, A. Identification and Statistical Analysis of Impulse-Like Patterns of Carbon Monoxide Variation in Deep Underground Mines Associated with the Blasting Procedure. Sensors 2019, 19, 2757. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qiao, S.; Zhang, Z.; Zhu, Z.; Zhang, K. Influence of cutting angle on mechanical properties of rock cutting by conical pick based on finite element analysis. J. Min. Sci. 2021, 28, 161–173. [Google Scholar] [CrossRef]
- He, T.; Yu, C.; Wu, X.; Deng, H. Modeling and Analysis of Single Hydraulic Props in Coal Mines. Key Eng. Mater. 2016, 693, 364–372. [Google Scholar] [CrossRef]
- Ren, H.; Zhang, D.; Gong, S.; Zhou, K.; Xi, C.; He, M.; Li, T. Dynamic impact experiment and response characteristics analysis for 1:2 reduced-scale model of hydraulic support. Int. J. Min. Sci. Technol. 2021, 31, 347–356. [Google Scholar] [CrossRef]
- Świątek, J.; Janoszek, T.; Cichy, T.; Stoiński, K. Computational Fluid Dynamics Simulations for Investigation of the Damage Causes in Safety Elements of Powered Roof Supports—A Case Study. Energies 2021, 14, 1027. [Google Scholar] [CrossRef]
- Buyalich, G.; Byakov, M.; Buyalich, K.; Shtenin, E. Development of Powered Support Hydraulic Legs with Improved Performance. E3S Web Conf. 2019, 105, 3025. [Google Scholar] [CrossRef] [Green Version]
- Frith, R.C. A holistic examination of the load rating design of longwall shields after more than half a century of mechanised longwall mining. Int. J. Min. Sci. Technol. 2015, 26, 199–208. [Google Scholar] [CrossRef]
- Zhao, X.; Li, F.; Li, Y.; Fan, Y. Fatigue Behavior of a Box-Type Welded Structure of Hydraulic Support Used in Coal Mine. Materials 2015, 8, 6609–6622. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Y.; Zhang, H.; Gao, K.; Zeng, Q.; Meng, F.; Cheng, J. Research on Intelligent Control System of Hydraulic Support Based on Position and Posture Detection. Machines 2023, 11, 33. [Google Scholar] [CrossRef]
- Zeng, Q.; Xu, P.; Meng, Z.; Ma, C.; Lei, X. Posture and Dynamics Analysis of Hydraulic Support with Joint Clearance under Impact Load. Machines 2023, 11, 159. [Google Scholar] [CrossRef]
- Byakov, M.A.; Buyalich, G.D.; Buyalich, K.G.; Uvakin, S.V. Radial strains in two-stage hydraulic extension legs. MIAB. Mining Inf. Anal. Bull. 2020, 1, 133–140. [Google Scholar] [CrossRef]
- Gribble, P. Integrating ODEs & Simulating Dynamical Systems; Scientific Computing Fall. 2019. Available online: https://gribblelab.org (accessed on 29 June 2023).
- Domagała, Z.; Kędzia, K. Analysis, modelling and verification of the phenomena occurring in a hydraulic prop during dynamic load. Tech. Trans. 2017, 114, 139–153. [Google Scholar] [CrossRef] [Green Version]
- Gabov, V.V.; Babyr, N.V.; Zadkov, D.A. Mathematical modelling of operation of the hydraulic support system of the powered support sections with impulse-free continuous regulation of its resistance to the roof rock lowering. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2021; Volume 1064, p. 012045. [Google Scholar] [CrossRef]
- Atkinson, K.; Han, W.; Stewart, D.E. Numerical Solution of Ordinary Differential Equations; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Designation | Parameter Value |
|---|---|---|
| mass of the piston | mtł | 637 kg |
| coefficient of friction | fs | 0.026 Ns/m |
| surface area of the piston | A | 0.07 m2 |
| bulk modulus of hydraulic fluid | B | 2∙109 Pa |
| Parameter | Parameter Designation | Parameter Value |
|---|---|---|
| Fluid flow rate value | Q | 0.00067 m3/s |
| 0.00058 m3/s | ||
| 0.00050 m3/s | ||
| 0.00042 m3/s | ||
| 0.00033 m3/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szurgacz, D.; Borska, B.; Pospíšil, L.; Dlouhá, D.; Pokorný, J.; Zhironkin, S. The Process of Developing Model Research for the Technology of Obtaining Energy Resources. Processes 2023, 11, 2320. https://doi.org/10.3390/pr11082320
Szurgacz D, Borska B, Pospíšil L, Dlouhá D, Pokorný J, Zhironkin S. The Process of Developing Model Research for the Technology of Obtaining Energy Resources. Processes. 2023; 11(8):2320. https://doi.org/10.3390/pr11082320
Chicago/Turabian StyleSzurgacz, Dawid, Beata Borska, Lukáš Pospíšil, Dagmar Dlouhá, Jiří Pokorný, and Sergey Zhironkin. 2023. "The Process of Developing Model Research for the Technology of Obtaining Energy Resources" Processes 11, no. 8: 2320. https://doi.org/10.3390/pr11082320