1. Introduction
Deepwater oil and gas fields accounted for 67% of the discoveries made and 68% of the reserves developed across the world in the past ten years, and the deepwater area has become an essential field for oil and gas exploration and development [
1]. However, deepwater oil and gas resource development involves a narrow safety density window between the formation pore pressure and fracture pressure. Dual-gradient drilling technology is a necessary technical means by which to solve this problem [
2,
3,
4,
5,
6,
7,
8].
Currently, three types of dual-gradient drilling technologies are used internationally: riserless drilling technology, subsea pump lifting drilling technology, and dual-density dual-gradient drilling technology [
9]. The technology of riserless drilling is mainly used for surface drilling. AGR’s Riserless Mud Recovery (RMR) system is a typical example of this technology. It collects drilling mud and cutting flow back through a suction module installed at the subsea wellhead and transports this fluid to the subsea disc pump through a suction hose, which is then lifted to the surface drilling platform through the mud return line, achieving the recycling of the drilling mud [
10,
11]. This technology is highly capable of well control in shallow, hazardous areas. It has a low rig payload and space requirements for the drilling rig because it does not use riser pipes or auxiliary equipment. RMR technology has been successfully applied in over 1000 wells globally including the Caspian, North, and other seas [
12]. Controlled annular mud level (CAML) technology is an extension of RMR technology and is used after the installation of riser pipes and blowout preventer assemblies [
13]. This technology can detect kick and leakage earlier and achieve controlled pressure cementing [
14,
15]. It has been successfully used in Brazil and the Mediterranean offshore as well as in the North Sea, the Barents Sea, and other seas. Subsea pump lifting drilling technology is represented by the SMD system developed by Conoco and Hydril, the DEEPVISION system developed by Baker Hughes and Transocean Sedco Forex, and the SSPS system developed by Shell. Drilling mud enters the wellbore through the drill pipe and drill bit and returns to the seafloor, where it changes direction and enters the solid phase treatment device to crush large solid particles. After treatment, the mud enters the subsea mud lift pump and is sent to the surface through the mud return line into the mud circulation tank. This technology saves time and costs and can be converted to conventional drilling [
16]. The dual-density dual-gradient drilling technique involves the mixing of drilling mud with a low-density medium to dilute it to a low-density fluid, which is then injected into the bottom of the riser to reduce the density of the drilling mud inside the riser and create two different pressure gradients in the riser annulus and wellbore annulus [
17]. Transocean’s Continuous Annular Pressure Management system (CAPM), the LSU and BR’s gas lift dual-gradient drilling system, and the MTI’s hollow sphere dual-gradient drilling system are typical of this technology [
18,
19,
20,
21].
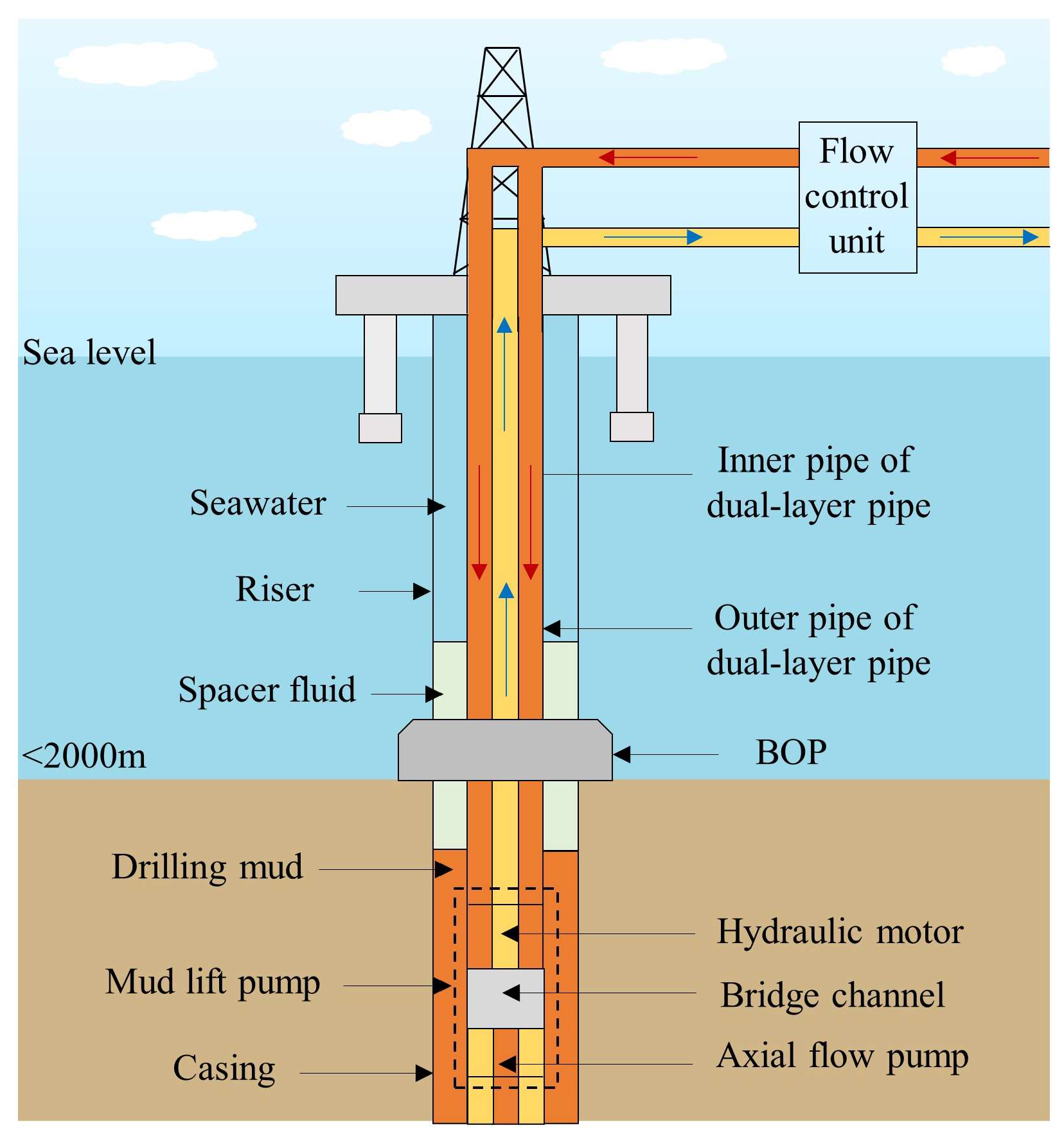
Dual-layer pipe dual-gradient drilling technology is new in this field. This technology can be converted to conventional drilling technology, and the mud lift pump used is driven by seawater, so the system has high reliability [
22,
23]. As shown in
Figure 1, in this technology, drilling mud enters the bottom of the wellbore from the annulus of the dual-layer pipe and is lifted to the water surface through the inner pipe of the dual-layer pipe by the bottom mud lift pump. Therefore, this technology has strong rock-carrying and wellbore-cleaning capabilities. The spacer fluid separates the seawater in the annulus of the riser pipe and drilling mud in the annulus of the wellbore to realize the dual-gradient pressure system. The flow rate control unit on the water surface regulates the flow rate of the drilling mud in the inflow pipeline and the opening of the throttle valve in the return fluid pipeline, thereby controlling the lift and displacement of the bottom mud lift pump to realize the upward and downward movement of the spacer fluid in order to ensure that the bottom hole pressure is always within the safe density window [
24,
25]. Therefore, the stable operation of the dual-gradient pressure system, consisting of seawater, spacer fluid, and drilling mud, is the key to controlling bottom hole pressure. The spacer fluid is an essential component of this dual-gradient pressure system, and a stable spacer fluid interface is the primary prerequisite for the stable operation of the pressure system. However, dual-layer pipe dual-gradient drilling technology is still in the development stage, and there is a lack of research on the stability of the spacer fluid interface.
It is found that the study of cementing displacement interface has reference value for exploring the stability of the spacer fluid interface in dual-layer pipe dual-gradient drilling. However, most of the existing research on cementing displacement has only been carried out using the displacement analysis of the two-phase fluid, drilling mud/spacer fluid, spacer fluid/cement slurry, drilling mud/cement slurry [
26,
27,
28,
29,
30,
31,
32], which is different from the three-phase movement of annular seawater, spacer fluid, and drilling mud in dual-layer pipe dual-gradient drilling. In addition, the cementing displacement annulus does not need to consider the influence of the drill string, but the flow of the spacer fluid in the annulus in dual-layer pipe dual-gradient drilling will be affected by the drill string disturbance, which puts higher requirements on the stability of the spacer fluid interface. Therefore, it is necessary to combine the technical background and characteristics of dual-layer pipe dual-gradient drilling to analyze the flow of three-phase fluids in the annulus and explore the influence of various factors on the stability of the spacer fluid interface.
Based on the above situation, a seawater-spacer fluid-drilling mud annular flow simulation model was established in this study, with a bottom hole pressure control step of 0.2 MPa, and the spacer fluid height after a single control was used as the evaluation index to study the influence of annular flow velocity, the spacer fluid properties, and drill string rotation speed on the stability of the spacer fluid interface. The results show that annular flow velocity and the spacer fluid properties significantly affect the interface’s stability, but the rotation speed of the drill string has a negligible effect. This research can provide a reference for the development of dual-layer pipe dual-gradient drilling technology.
Figure 1.
The dual-layer pipe dual-gradient drilling system [
33].
Figure 1.
The dual-layer pipe dual-gradient drilling system [
33].
2. Simulation Model Specification
Model setting is the foundation for conducting simulations, and it consists of five parts: establishing the physical model, basic governing equations, materials, and boundary conditions, and formulating evaluation criteria for the stability of the spacer fluid interfaces and model validation.
2.1. Physical Simulation Model
In conventional drilling, the drilling mud system is designed based on the pressure prediction profile from logging to maintain the bottom hole pressure within the safe window for a certain well section. However, the large pressure difference between the bottom hole and formation pressure can affect the rate of penetration (ROP) [
34,
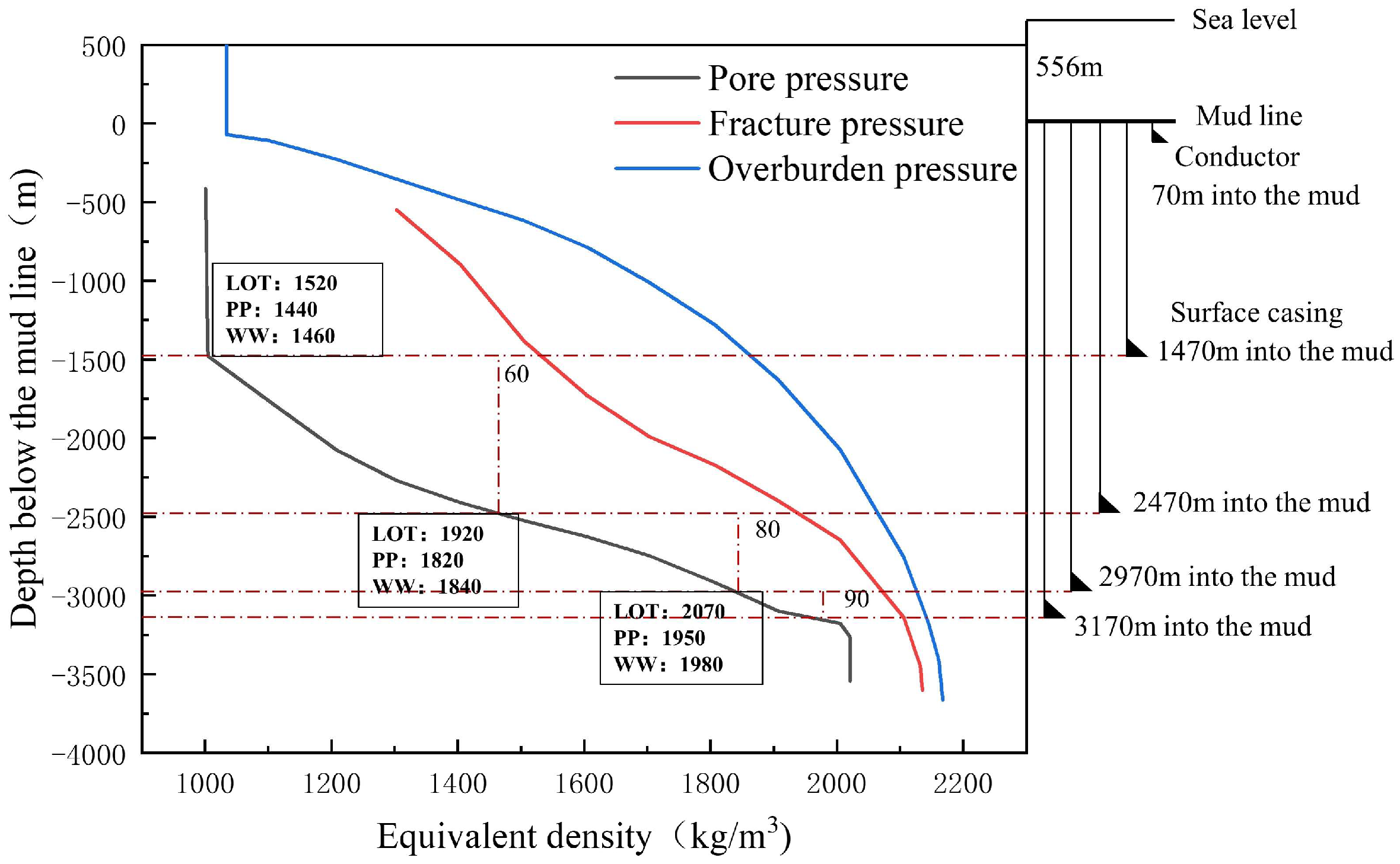
35]. Therefore, to minimize the bottom hole pressure difference and improve the drilling efficiency, this paper adopted the dual-layer dual-gradient drilling method for a LS well, as shown in
Figure 2, by continuously adjusting the bottom hole pressure to be within the safe density window and ensure a low bottom hole pressure difference.
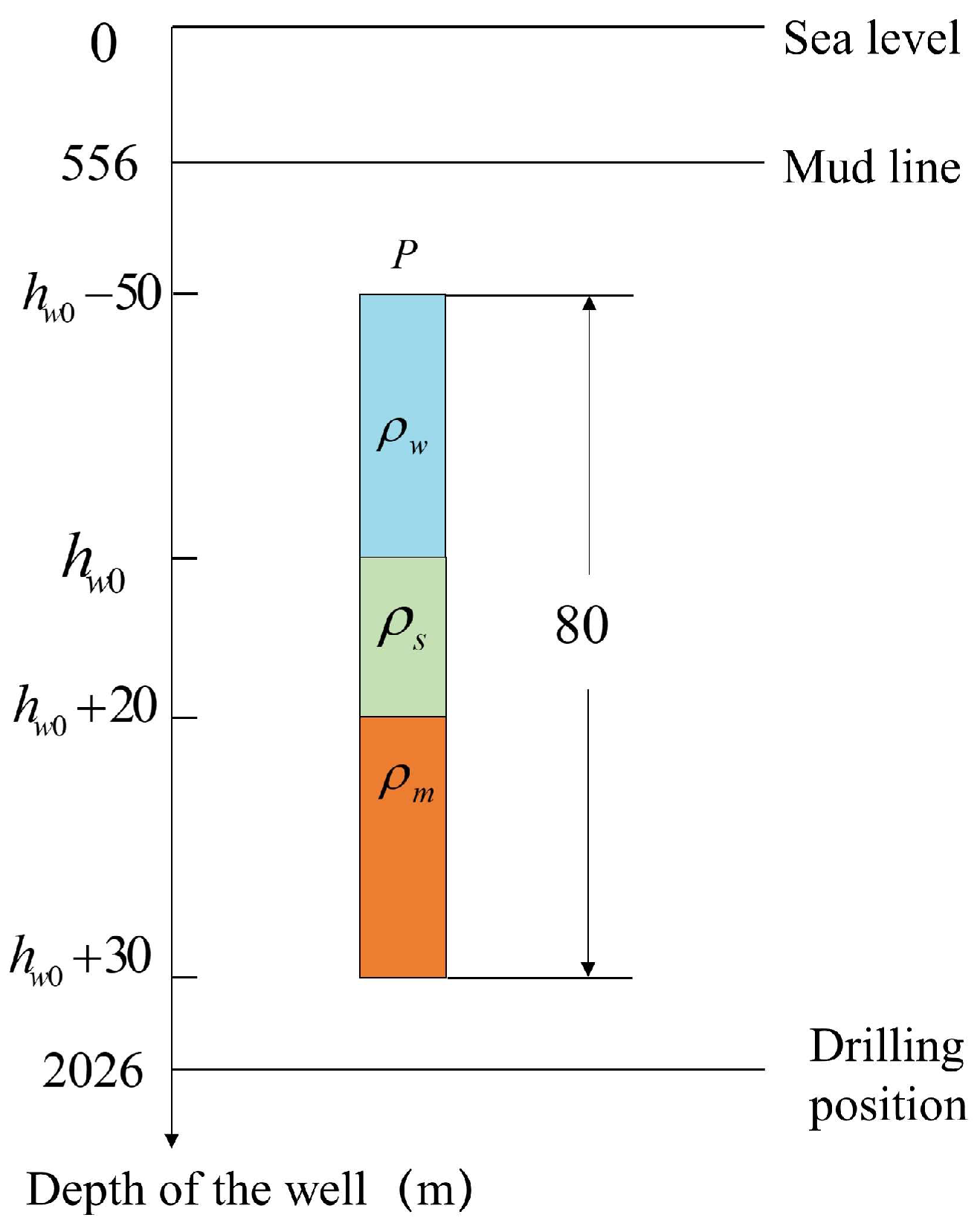
According to
Figure 2, the surface drilling is completed below the mud line at 1470 m, 2026 m below sea level. Starting from this level, dual-layer pipe dual-gradient drilling is used. The safe density window at this location is (1030, 1520). Considering the drilling mud density additional value of 70 kg/m
3 and the equivalent density of the target bottom hole pressure of 1100 kg/m
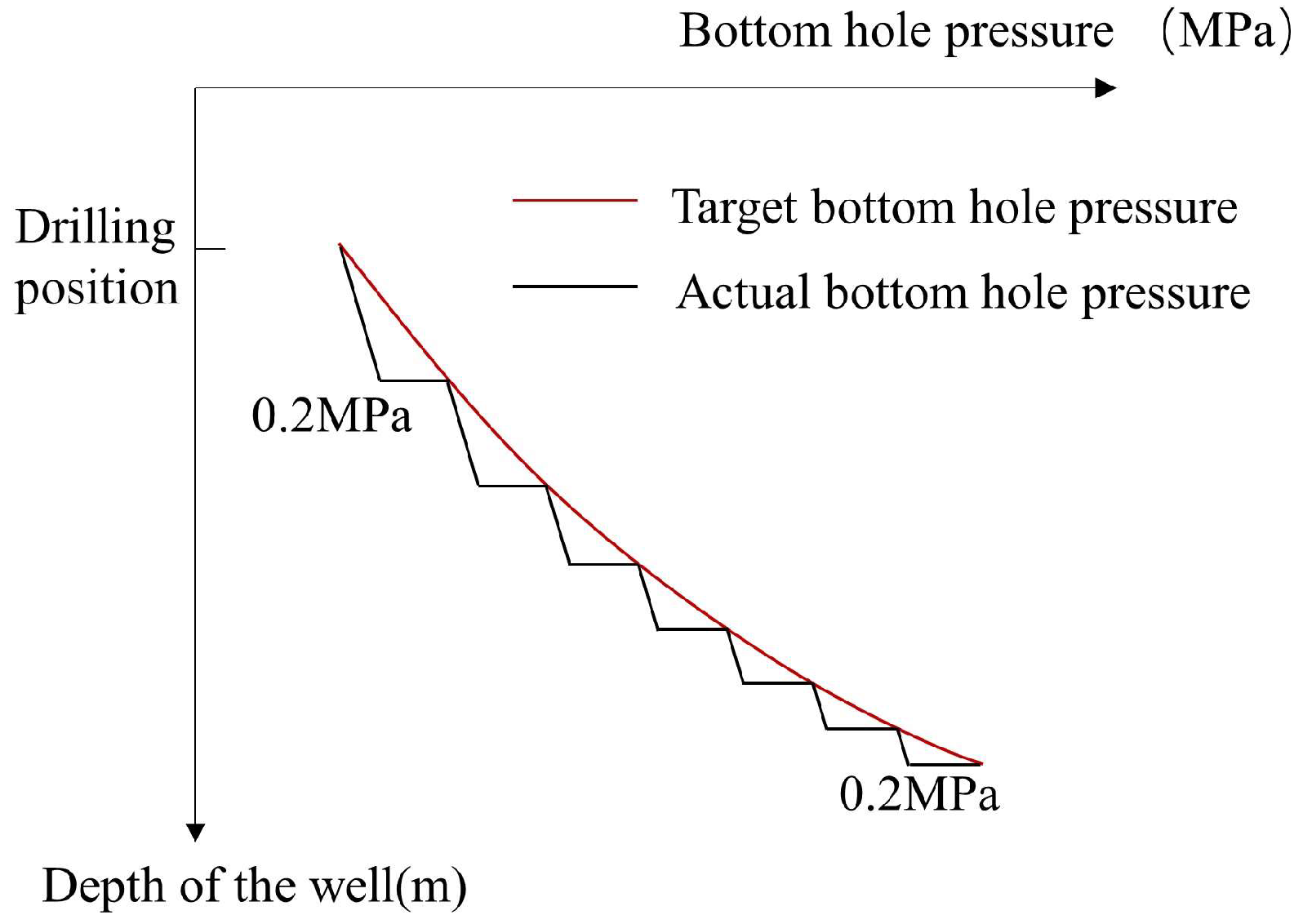
3, the spacer fluid position corresponding to this equivalent density is the optimal position. Assuming that the height of the spacer fluid in the dual-gradient pressure system is 20 m, establishing the seawater-spacer fluid-drilling mud pressure system to start drilling after the spacer fluid is in the optimal position. As shown in
Figure 3, when the pressure difference between the actual bottom hole pressure and the target bottom hole pressure reached 0.2 MPa, the position of the spacer fluid was adjusted once to ensure that the bottom hole pressure was equal to the target bottom hole pressure.
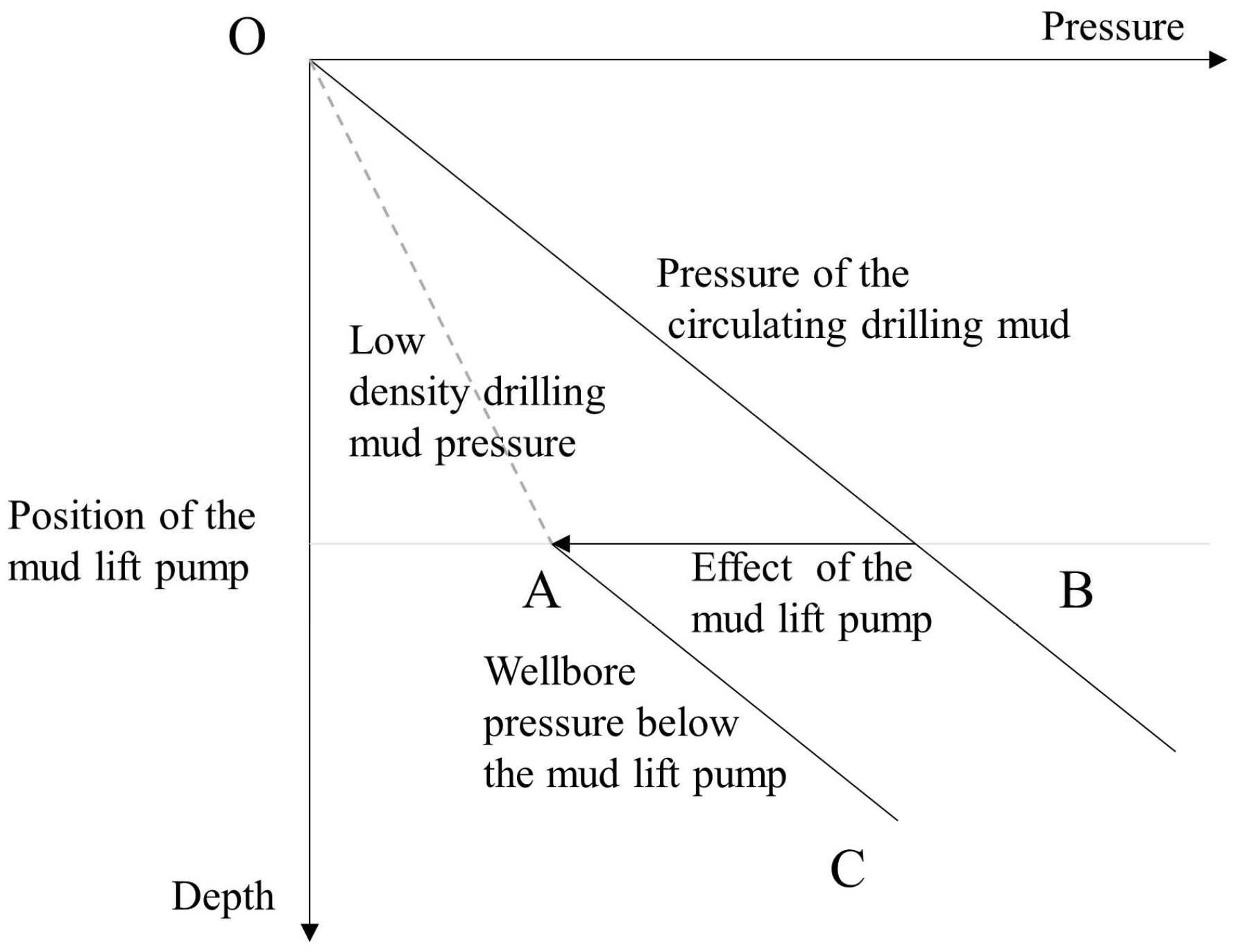
As shown in
Figure 4, the bottom hole pressure expression of dual-layer pipe dual-gradient drilling with no fluid flow in the annulus is [
33]
where the unit of
is MPa;
are the density of the seawater, spacer, and drilling mud, respectively, kg/cm
3;
are the height of the seawater, spacer fluid, and drilling mud, respectively, m;
is the equivalent density, kg/cm
3;
is the equivalent well depth, m. The expression for
is
From Equations (1) and (2), the expression for seawater height is
where
can indirectly indicate the spacer fluid position.
The actual working conditions are complex and changeable, and five assumptions were adopted in this paper:
- (1)
All fluids are incompressible;
- (2)
Both the spacer fluid and drilling mud are pseudoplastic fluids;
- (3)
The wellbore is uniform, and variations in wellbore diameter and the effects of the dual-layer pipe joints are ignored;
- (4)
The annulus is rigid with smooth walls;
- (5)
Due to the small control step of 0.2 MPa for the bottom hole pressure and the low drilling speed during actual drilling, the equivalent well depth change caused by drilling during the process of reaching the pressure difference and during the regulation of bottom hole pressure can be ignored.
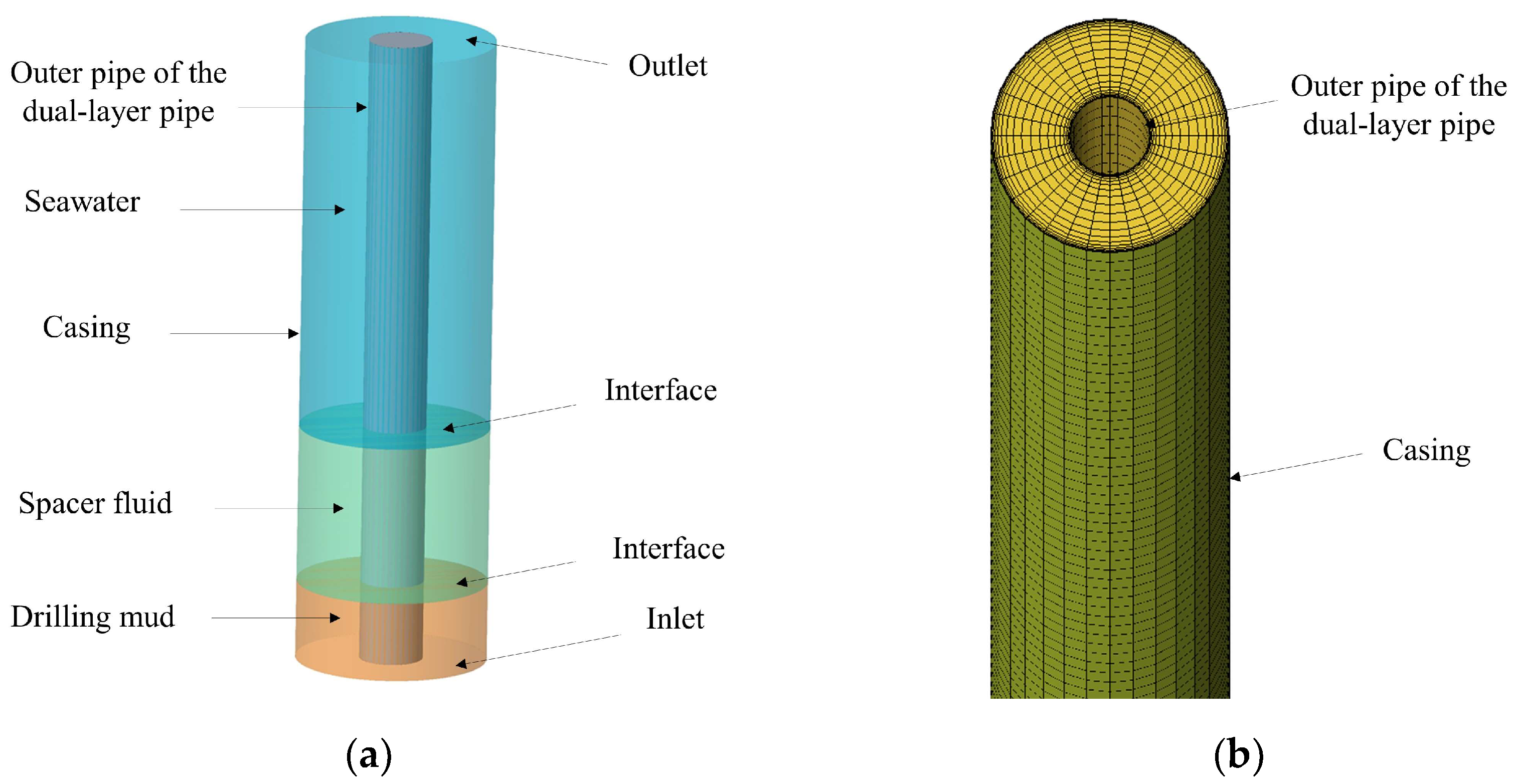
The geometric parameters used for the simulation are shown in
Table 1. A three-dimensional model was established to simulate the annular fluid flow between the outer pipe of the dual-layer pipe and the casing. The ICEM divides the hexahedral mesh, and the grid is refined in the near-wall area, as shown in
Figure 5.
2.2. Basic Governing Equation
This study utilized FLUENT as its numerical software [
31], employing the k-epsilon model and species transport model. The relevant governing equations are as follows:
- (1)
Continuity and Momentum Equations
The equation for the conservation of mass, or continuity equation, can be written as follows:
where the source
is the mass added to the continuous phase from the dispersed second phase and any user-defined sources.
Momentum conservation equations:
where
is the static pressure;
and
are the gravitational body force and external body forces, respectively;
also contains other model-dependent source terms such as porous-media and user-defined sources;
is the stress tensor, where
is the molecular viscosity,
is the unit tensor, and the second term on the right-hand side is the effect of volume dilation.
The change in heat during the flow of incompressible fluids is very small, and the energy equation can be neglected.
- (2)
Species transport equations
where
is the local mass fraction of each species;
is the diffusion flux of species
, which arises due to the gradients of concentration and temperature;
is the net rate of the production of species
via a chemical reaction;
is the rate of creation via addition from the dispersed phase plus any user-defined sources.
- (3)
Transport equations for the standard model
The turbulence kinetic energy,
, and its rate of dissipation,
, are obtained from the following transport equations:
where
represents the generation of turbulence kinetic energy due to the mean velocity gradients;
is the generation of turbulence kinetic energy due to buoyancy;
represents the contribution of the fluctuating dilatation in compressible turbulence to the overall dissipation rate; the turbulent viscosity
;
, and
are the recommended values of 1.44, 1.92, 0.09, 1.0, and 1.3, respectively;
and
are user-defined source terms.
2.3. Materials and Boundary Conditions
The physical parameters of the materials used are shown in
Table 2.
In this paper, the boundary of two different fluids was set as the interface. The inner wall of the annular space is also the outer pipe of the dual-layer pipe, which was set as the rotating wall. The boundary conditions of the velocity inlet and pressure outlet were adopted, and the specific values are as follows:
As shown in
Figure 4, the bottom hole pressure control principle of dual-layer pipe dual-gradient drilling is as follows. When it is necessary for the bottom hole equivalent density to decrease, one adjusts the mud lift pump to cause the drilling mud in the casing annulus to decrease, the position of the spacer fluid to drop, and the bottom hole pressure to decrease. Conversely, when the bottom hole equivalent density is required to increase, the position of the spacer fluid should be raised. Therefore, the magnitude of the annular fluid flow rate is determined by the drilling mud flux difference between the inflow and outflow of the dual-layer pipe. If one needs to reach the target bottom hole pressure as soon as possible, it should be as large as possible, assuming that it is 35 L/s (the design index of the mud lift pump is 35 L/s), that is, all 35 L/s of the inflow is used for bottom hole pressure control. Currently, the maximum movement rate of the annular fluid is 0.21 m/s. Therefore, the actual movement rate of the annular fluid during control should be less than 0.21 m/s; the inlet flow rate should be less than 0.21 m/s.
- (2)
Outlet boundary:
The positional relationship of the model throughout the whole well at the beginning of regulation is shown in
Figure 6.
- (1)
Initially, the expression for the actual wellbore pressure at the top of the model is
where
represents the liquid column height of the seawater in the initial state, which can be calculated with Equation (3).
- (2)
During regulation, the height of the seawater in the annulus decreases, but the top of the model is always the seawater until the end of regulation; then, the expression for the actual wellbore pressure at this location is
where
is the circulation pressure loss of seawater per unit length, MPa.
If Q and
are the maxima, the calculated circulating pressure depletion of the seawater beyond the top of the model is no greater than 0.08 MPa; thus, the value can be ignored. Therefore, during the regulation process, the actual wellbore pressure at the top of the model is consistent with the wellbore pressure at this position in the initial state. Specifically,
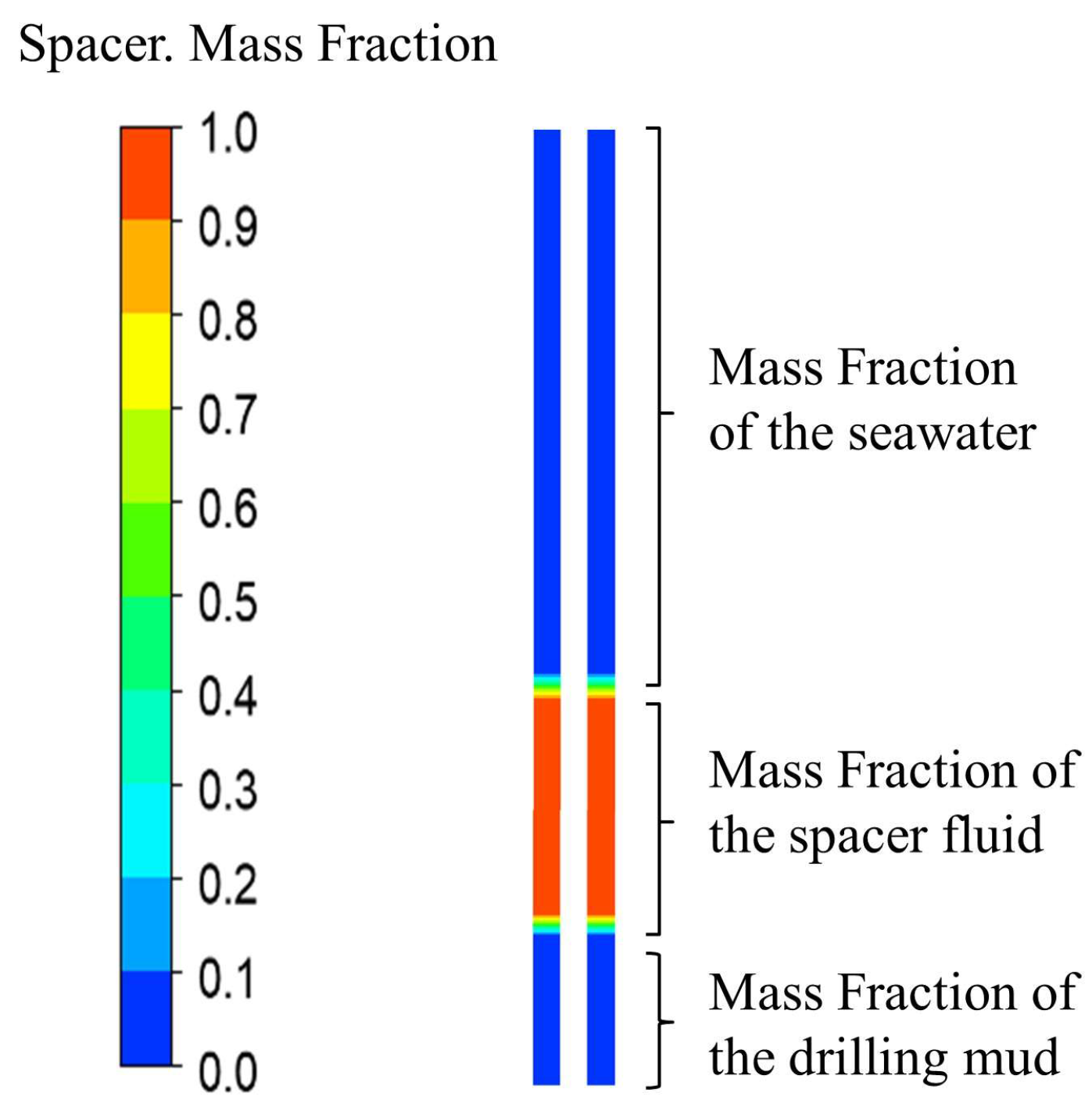
As shown in
Figure 7, there are two stable interfaces between the seawater, spacer fluid, and drilling mud in the transient model under the initial conditions.
2.4. Evaluation Criteria
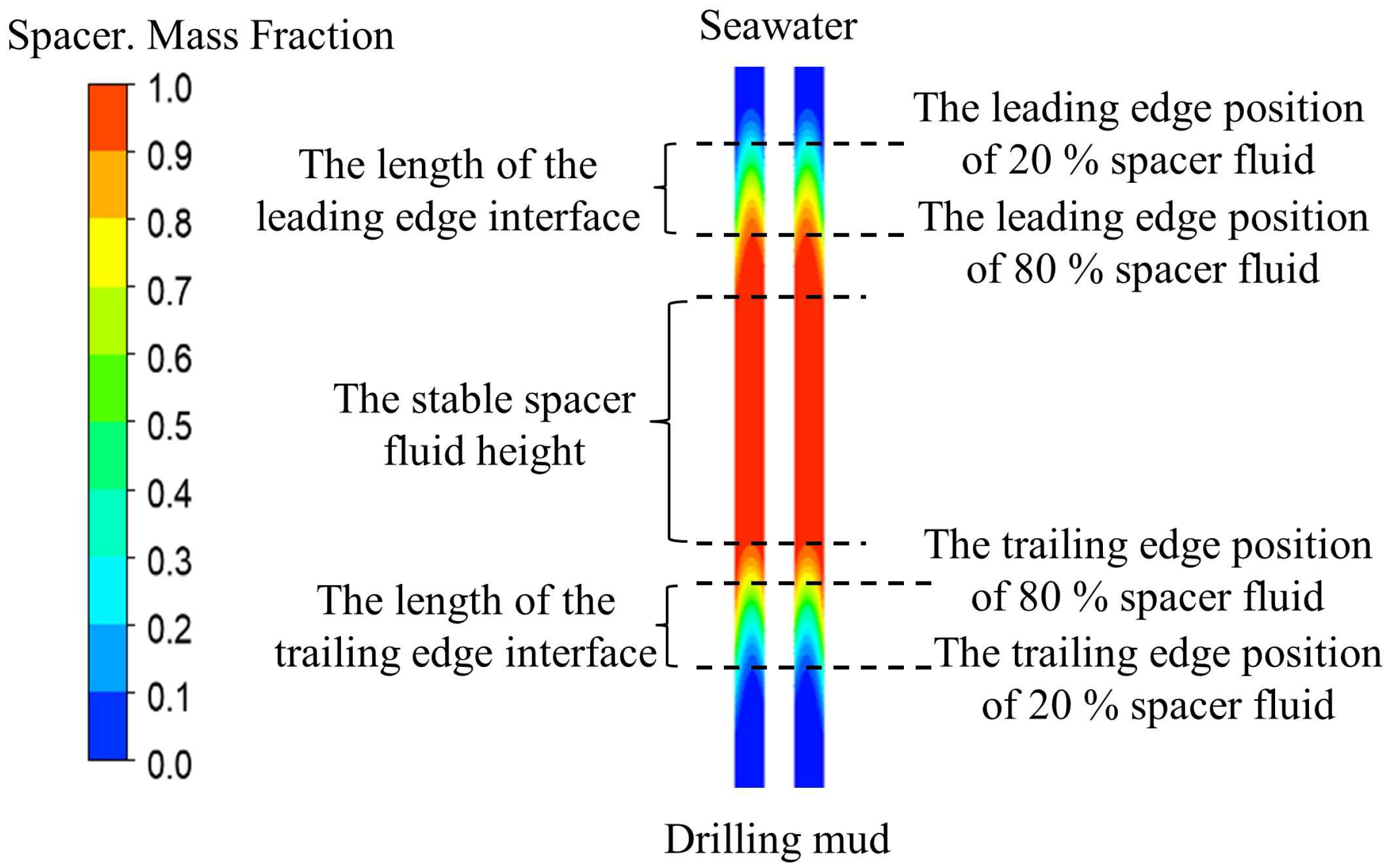
The spacer fluid is regarded as the interface between the seawater and drilling mud, and the stability of the spacer fluid interface refers to its ability to separate the seawater from the drilling mud. As shown in
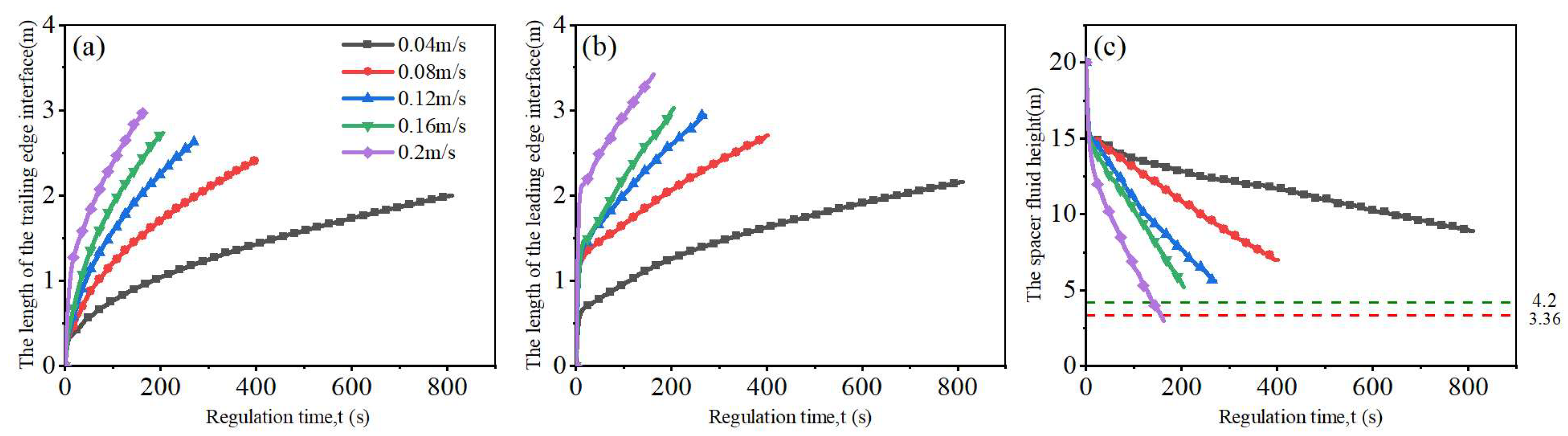
Figure 8, this paper evaluated the stability of the spacer fluid interface with the spacer fluid height in the annulus after a single adjustment of the bottom hole pressure as an index. In addition, the length and shape of the spacer fluid’s leading and trailing edge interfaces were used as auxiliary references.
- (1)
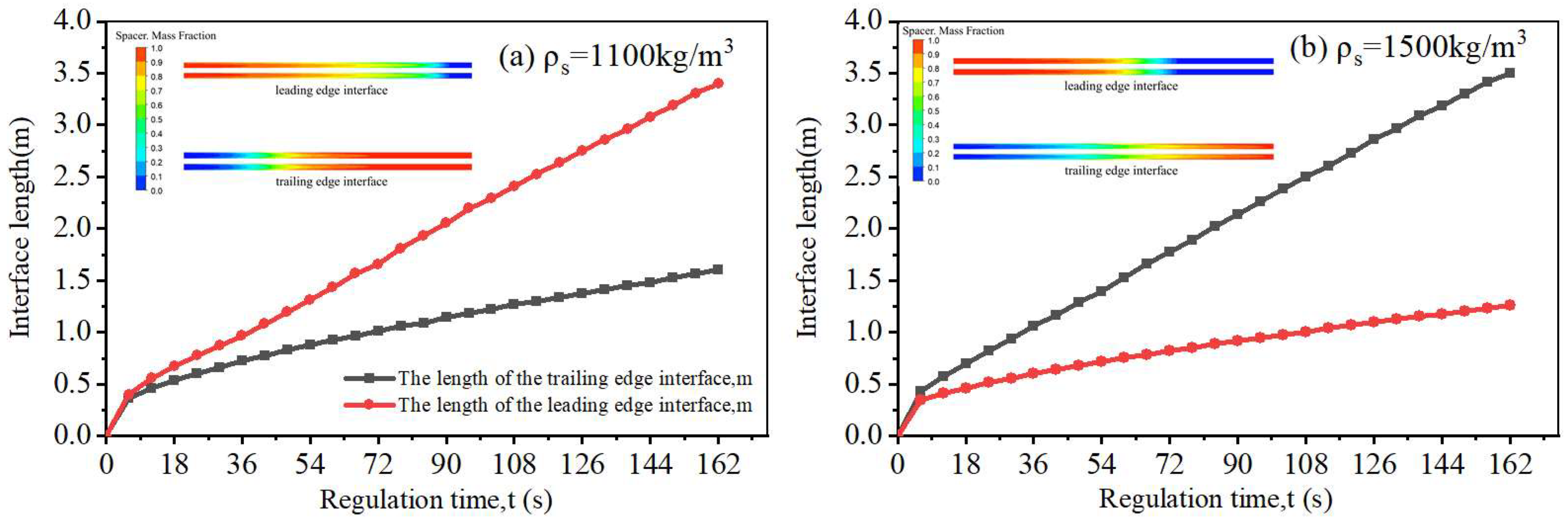
The length of the leading edge interface, which is the interface length between the seawater and spacer fluid, evaluates the degree of mixing between the spacer fluid and seawater.
- (2)
The length of the trailing edge interface, which is the interface length between the drilling mud and spacer fluid, evaluates the degree of mixing between the spacer fluid and drilling mud.
- (3)
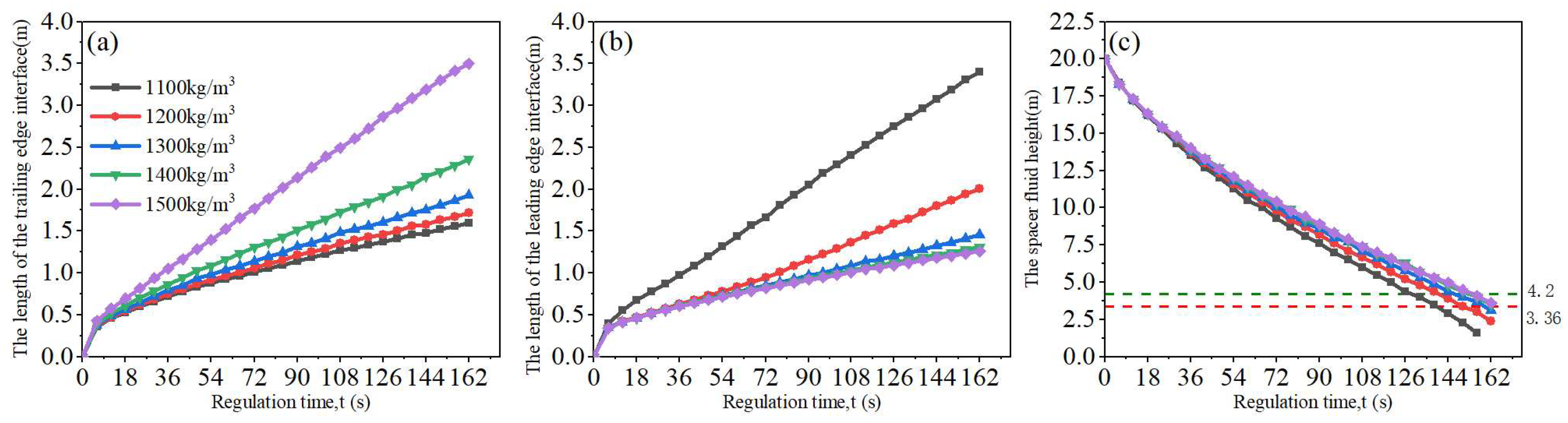
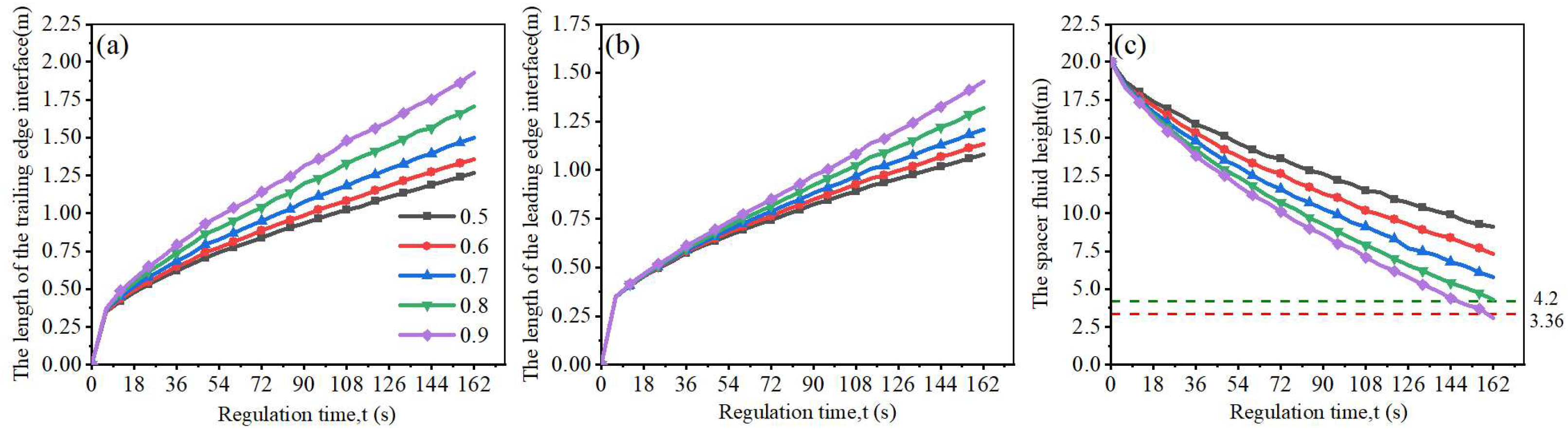
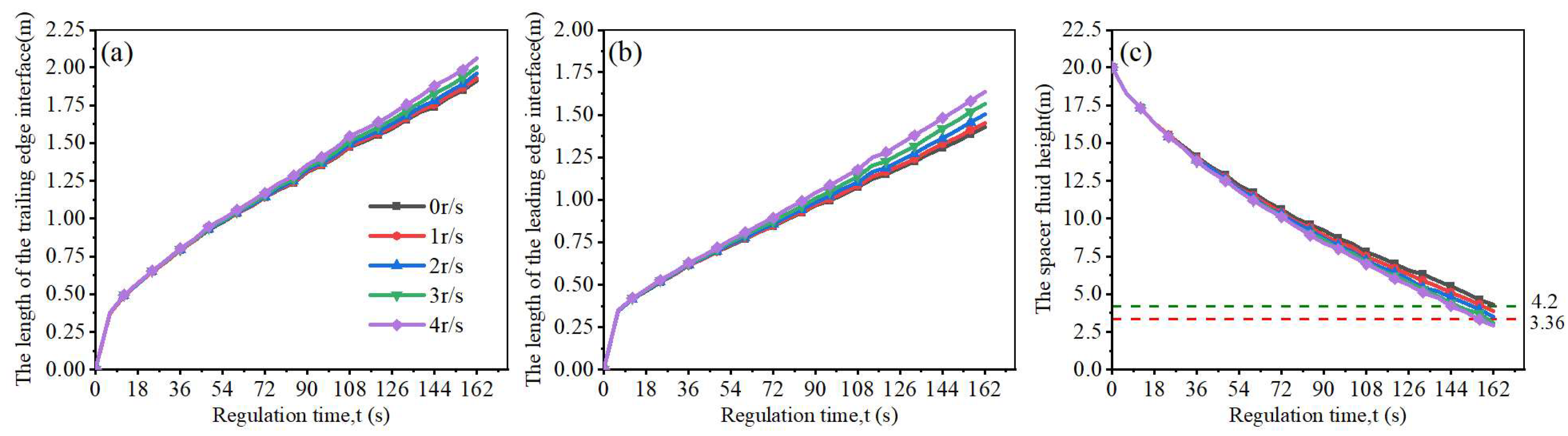
The spacer fluid height, which is the height of the spacer fluid with 100% mass fraction in the annulus, is used to assess the stability of the spacer fluid interface, and the higher this height is, the more stable the spacer fluid interface.
The length of the leading and trailing edge interfaces and the spacer fluid height can be obtained by writing a custom function to record the mass fraction of the spacer fluid at each grid height. Consider a response time of 20 s, which refers to the time consumed from detecting the wellbore pressure regulation completion to when the signal of stopping regulation transmits to the annulus. Assuming that the annulus fluid is regulated at the maximum flow rate, to ensure the stability of the spacer interface, the spacer height must be greater than 4.2 m at the end of regulation. Taking 4.2 m as the standard, if the spacer fluid height is within the range of 3.36 m to 4.2 m, which is within 80%, the spacer fluid interface is considered relatively stable; if the height is less than 3.36 m, the spacer fluid interface is unstable.
2.5. Model Validation
- (1)
Grid independence verification
According to the principle of custom function writing in this article, the calculation of interface length is closely related to the setting of the grid scale in the flow direction. Therefore, it is necessary to study the influence of the grid scale in the flow direction. As shown in
Table 3, when the flow direction grid step was reduced to 0.1 m, the error was within 5%, and the error change was minimal when the grid scale was further reduced. Therefore, the flow direction grid step was determined to be 0.1 m. The number of grids used in the simulation model is 512,000.
- (2)
Model Validation
In order to verify the feasibility of the principle of the dual-layer pipe dual-gradient drilling technology, we designed an offshore test system, mainly consisting of a drilling platform, single-wall drill pipe, conversion joint, dual-layer pipe, hydraulic mud lift pump, etc. The offshore test was conducted in a certain sea area with a depth of 1300 m in the South China Sea.
Figure 9 shows the location and schematic diagram of the offshore test of the dual-layer pipe dual-gradient drilling technology, and the flow direction of the circulating drilling mud is shown as the arrows in the figure. Since only one dual-layer pipe is used in the offshore test, the riser annulus achieves the effect of drilling mud backflow in the dual-layer pipe string. We closed the annular blowout preventer to separate the outlet and inlet of the hydraulic mud lift pump so that the mud lift pump could work to realize the dual-gradient drilling effect, as shown in
Figure 10. In addition, the riser’s auxiliary pipeline simulates the annulus’s impact between the dual-layer pipe and the riser, which can reflect the bottom hole pressure and verify the control mechanism of the dual-layer pipe dual-gradient drilling technology.
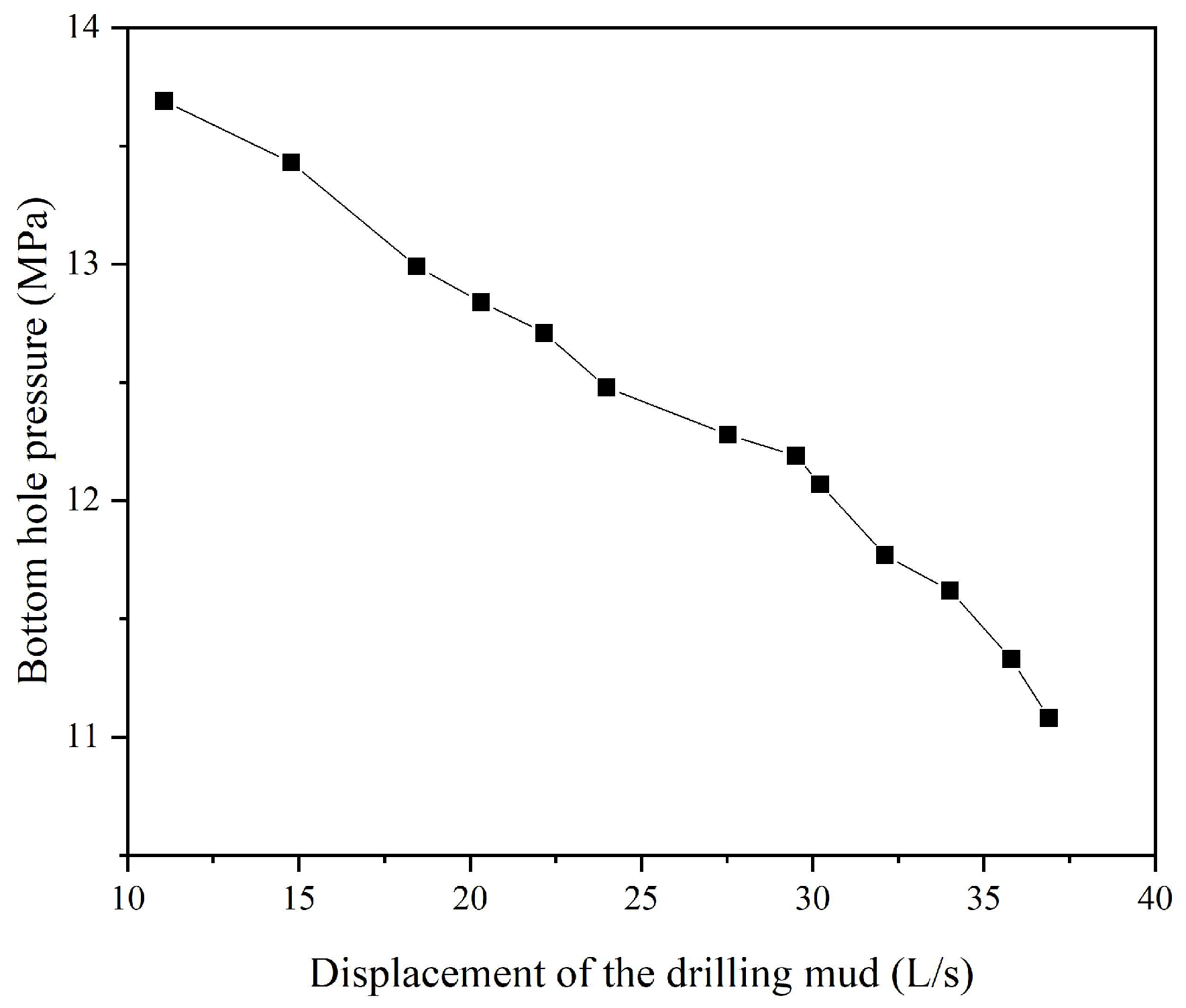
The experiment changed the displacement of the drilling mud to alter the head of the mud lift pump, thus regulating the bottom hole pressure. The experimental results are shown in
Figure 11. It can be seen that the mud lift pump and experimental system we designed could reduce the bottom hole pressure by 2.67 MPa. This can be converted so that the equivalent density control range of the bottom hole at a 1000 m water depth is 271 kg/m
3, which verifies the correctness and feasibility of the principle of dual-layer dual-gradient drilling technology.
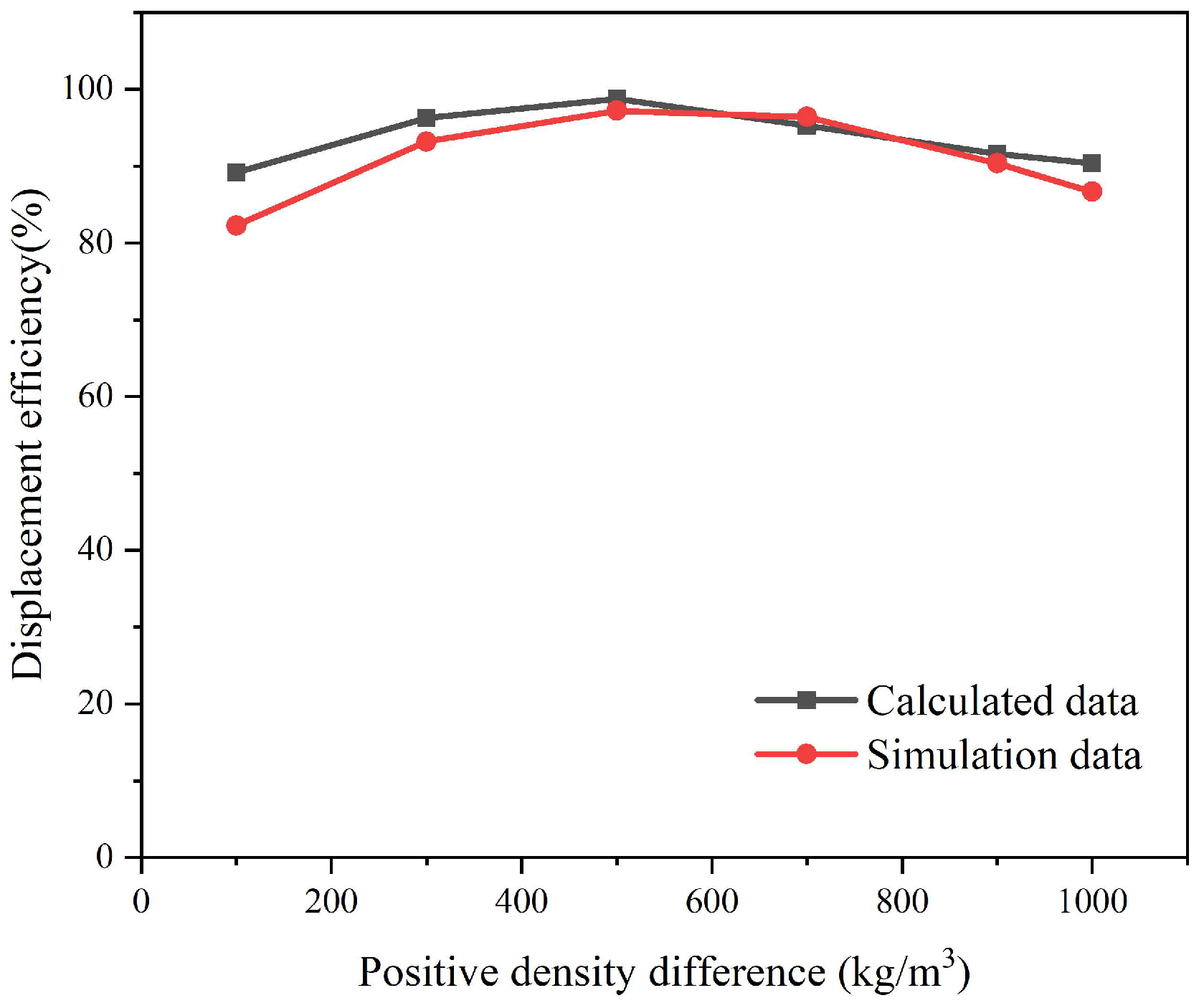
Based on the feasibility of the principle of the dual-layer pipe dual-gradient drilling technology, we verified the correctness of the established model. According to the literature, specifically [
31] and [
32], it can be seen that the flow characteristics of multiphase fluids in the annulus can be described by two parameters: the interface length and displacement efficiency. In this study, the displacement efficiency was indirectly used to verify the model’s accuracy. We extracted the displacement efficiency calculated with different density differences when the inclination angle of the uniform borehole wall is 0, as shown in
Table 4 of Ref. [
36], and compared it with the data obtained using the model simulation under the same working conditions explored in this paper. The result, as shown in
Figure 12, indicates that the deviation of the simulation model used in this paper was less than 10%, which falls within a reasonable range.
4. Conclusions
In this work, a seawater-spacer fluid-drilling mud annular flow model for dual-layer pipe dual-gradient drilling was established, and an evaluation standard for the stability of the spacer fluid interface was conducted. The computational fluid dynamics method was used to simulate the flow of annular fluid when regulating the bottom hole pressure of 0.2 MPa. We investigated the effects of the flow rate and physical parameters of the spacer fluid and the rotation speed of the drill string on the stability of the spacer fluid interface. The conclusions of this paper can be summarized as follows:
- (1)
The flow velocity of the annular fluid and the physical parameters of the spacer fluid including the density, liquidity index, and consistency coefficient are the main factors affecting the stability of the spacer fluid interface. In contrast, the drilling mud rotation speed has less influence on the stability of the spacer fluid interface.
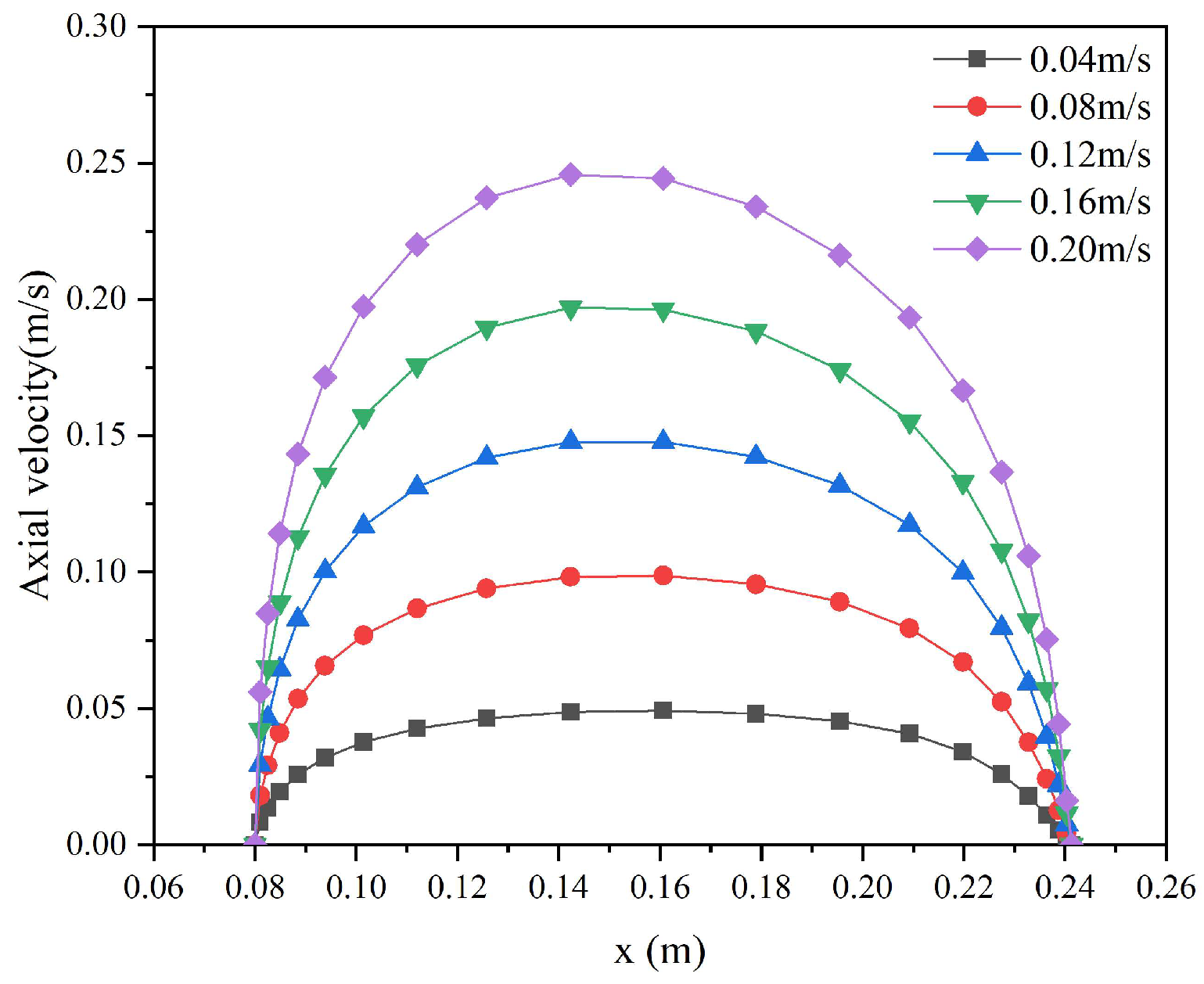
- (2)
During the regulation of pressure in the wellbore, the annular fluid’s flow velocity increases, leading to a rise in the inhomogeneity of the axial velocity distribution and a decrease in interface stability. The spacer fluid interface is stable when the flow velocity is between 0.04 m/s and 0.16 m/s. However, when the flow velocity increases to 0.2 m/s and the spacer fluid height is reduced to just 3 m after regulation, the spacer fluid interface is unstable. In practical engineering applications, we recommend regulating the bottom hole pressure with a low flow rate and maintaining drilling throughout the regulation process. This not only helps to maintain the stability of the spacer fluid interface but also ensures that the dual-layer pipe returns a sufficient drilling mud flow for rock carrying, thus ensuring drilling safety and efficiency.
- (3)
The influence of the spacer fluid’s density is mainly reflected in its density difference from the seawater and drilling mud. The greater the density difference, the more significant the buoyancy effect, resulting in a smaller length of the spacer fluid’s interface and a more stable interface. The stability of the spacer fluid interface decreases with the increase in its liquidity index and consistency coefficient; when its liquidity index is in the range of 0.5~0.8 and its consistency coefficient is in the range of 0.6~0.8 , the spacer fluid interface is stable. However, when the liquidity index of the spacer fluid increases to 0.9 and the consistency coefficient increases to 1.2~1.4 , the interface becomes unstable.
This study identified the main control factors and their influence patterns on the stability of the spacer fluid interface. It provides a reference for the selection of operational parameters to ensure that seawater and drilling mud do not mix during the whole drilling process, thereby maintaining the stable operation of the dual-layer pipe dual-gradient drilling system.
In the future, the influence of other factors that affect the vibration of the drill string such as the drilling pressure on the spacer fluid interface will be studied based on the research in this paper. Moreover, the effects of the coupling of various factors on the stability of the spacer fluid interface will be investigated in order to obtain the optimal combination of drilling parameters to maintain the stable operation of the dual-gradient pressure system and guide the drilling operations.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}