
Prediction and Diagnosis of Electric Vehicle Battery Fault Based on Abnormal Voltage: Using Decision Tree Algorithm Theories and Isolated Forest



Abstract
:1. Introduction
1.1. Motivations
1.2. Lithium-Ion Power Battery Overview
1.3. Research Review
1.4. Contributions
- (1)
- New Voltage Prediction Method: The article introduces an innovative battery voltage prediction approach based on the modified GBDT. This method facilitates swift and precise voltage prediction for multiple battery cells. Its exceptional training capability and heightened predictive accuracy have been validated.
- (2)
- Comprehensive Consideration of Vehicle States: In this study, diverse intrinsic factors of the vehicle in both operational and charging states are examined. These factors encompass battery total current, probe temperature, insulation resistance, and SOC. Additionally, factors pertaining to driving behavior, such as speed and operational smoothness, are taken into consideration. The comprehensive evaluation of these multidimensional factors augments the precision and comprehensiveness of battery voltage prediction in this paper.
- (3)
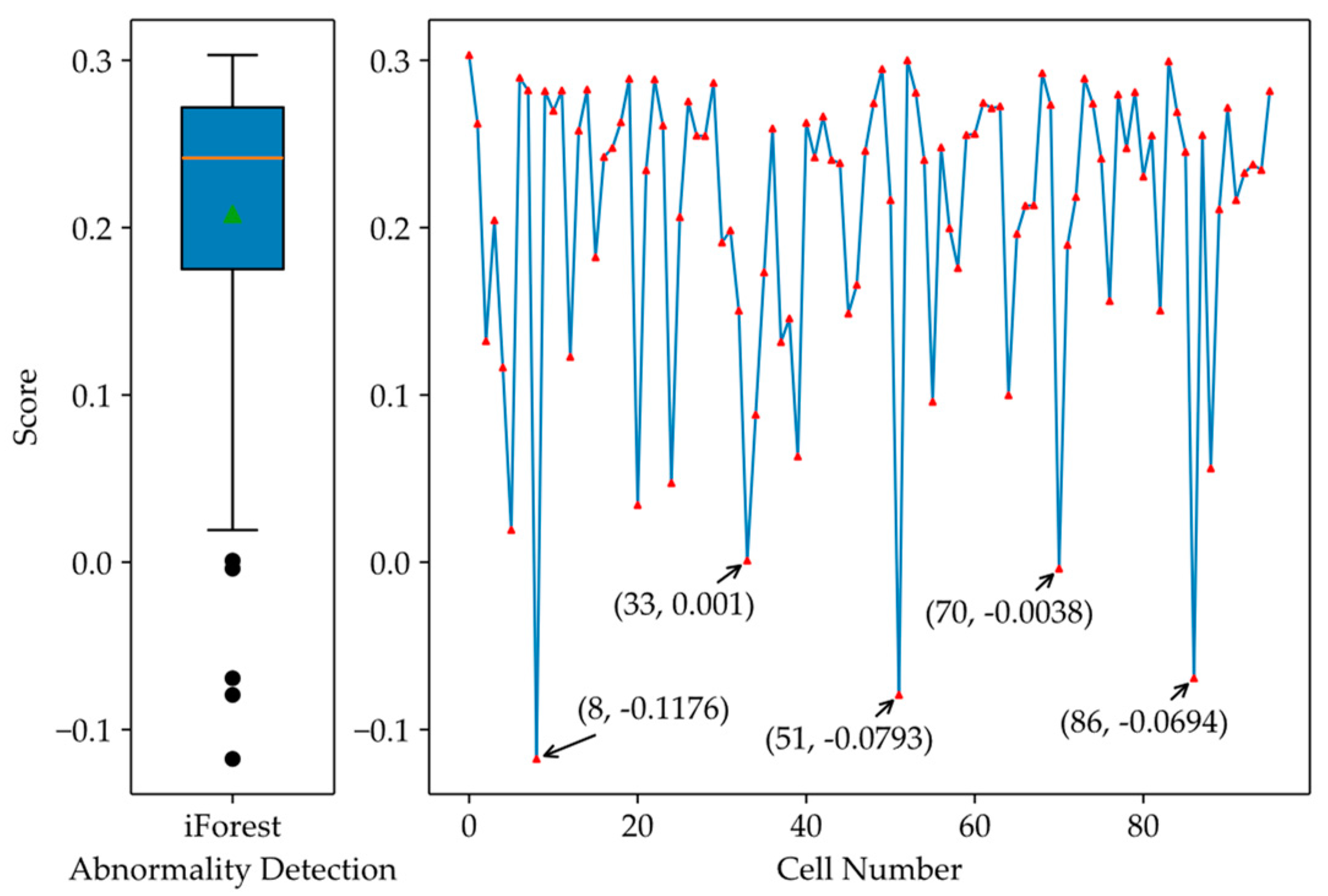
- Anomaly Detection: iForest is used to calculate the abnormal score of each battery cell, and then Boxplot is used to diagnose the above-obtained scores; the abnormal cells are identified based on the scores. iForest and Boxplot are used for joint fault diagnosis to reduce the false alarm rate of abnormality detection and improve the accuracy of power battery abnormality prediction.
1.5. Organization of Paper
2. Data Description and Processing
- (1)
- Linear interpolation method processing:If is part of the data that is missing or wrong, it will be processed using linear interpolation:
- (2)
- Deletion method:If represents continuous data with missing values and errors, this part of the data will be deleted directly.
3. Battery Fault Diagnosis Model Combining the Modified GBDT and iForest-Boxplot
3.1. Battery Cell Voltage Prediction Model Based on the Modified GBDT
| Algorithm 1. The Modified GBDT |
|
3.2. Anomaly Detection Based on iForest-Boxplot
4. Voltage Prediction and Fault Diagnosis Results and Discussion
4.1. Optimization of Training Samples and Hyperparameters
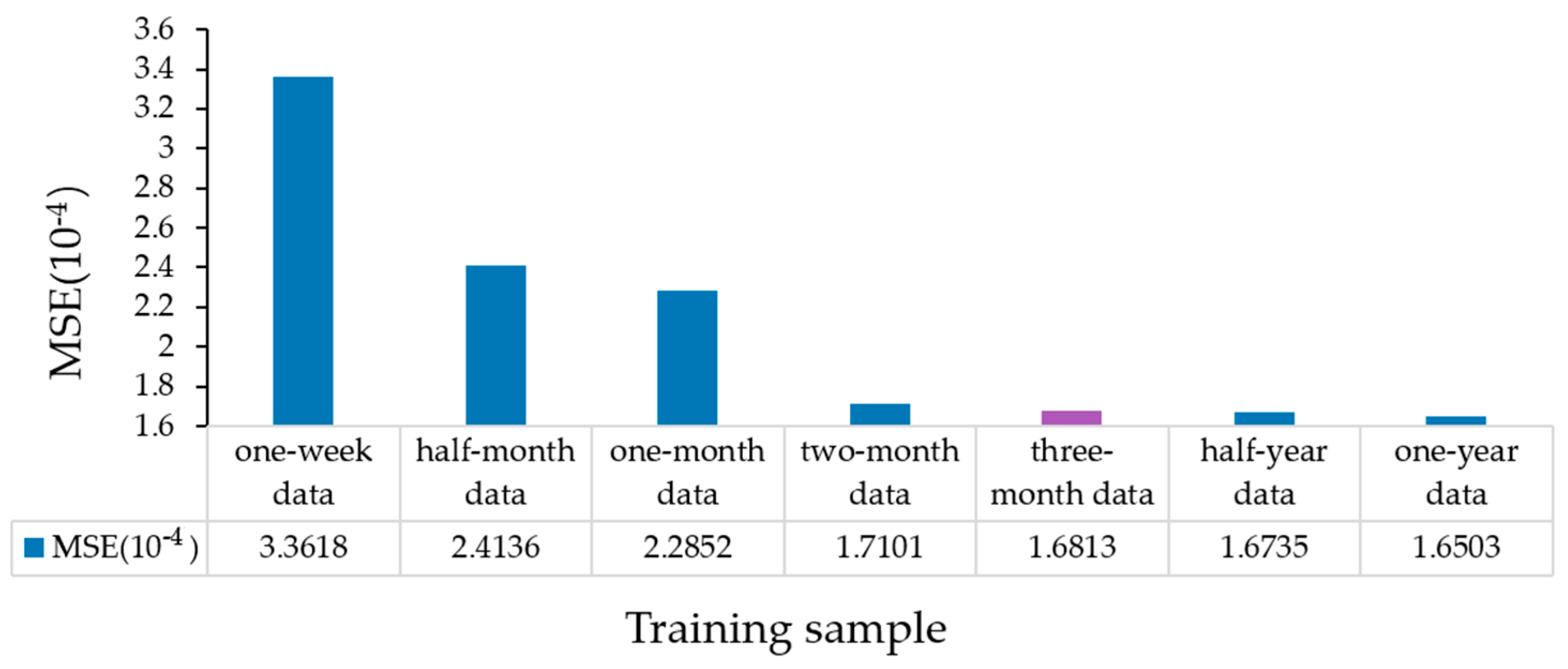
4.2. Comparison of Different PTSs
4.3. Comparison of Different Training Time Steps
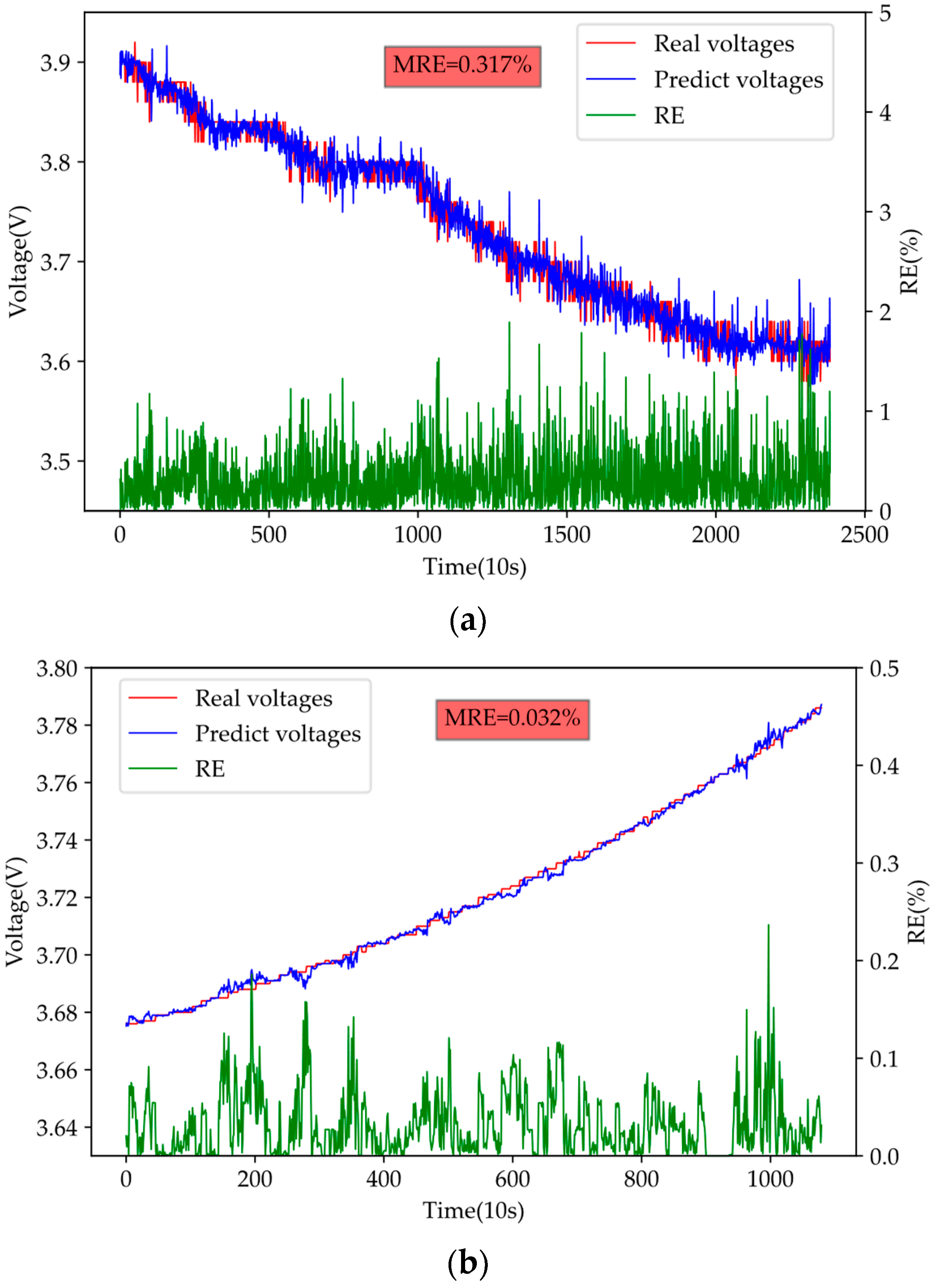
4.4. Battery Voltage Prediction Results and Discussion
4.5. Validate Robustness and Adaptability with Real-World Vehicle Data
4.6. Algorithm Superiority Verification
5. Real-World Power Battery Anomaly Prediction Results and Verification
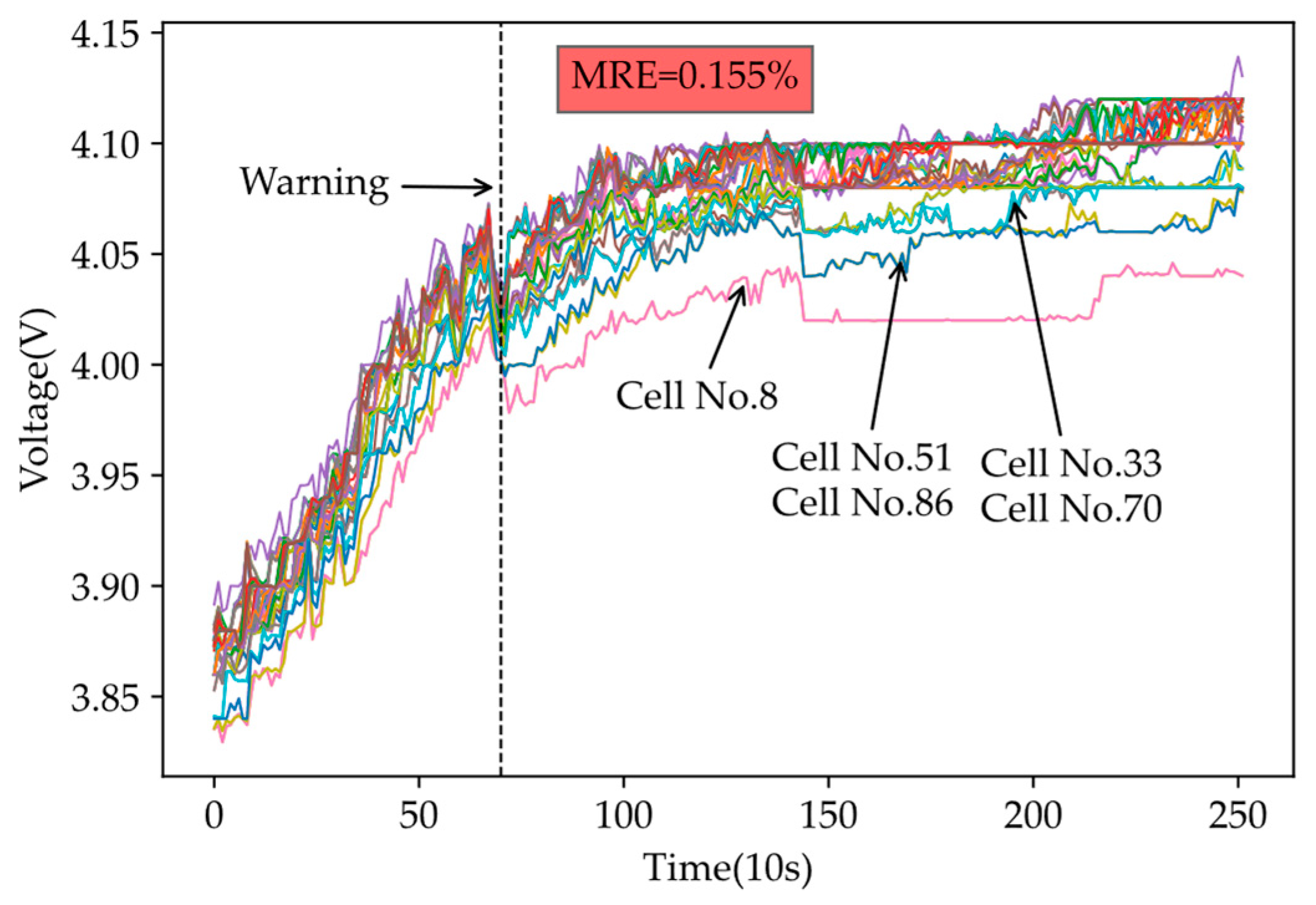
5.1. Abnormal Voltage Prediction
5.2. Fault Diagnosis Result and Discussion Based on iForest-Boxplot
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, W.; Li, X.; Li, X. Deep learning-based prognostic approach for lithium-ion batteries with adaptive time-series prediction and on-line validation. Measurement 2020, 164, 108052. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.Y.; Yu, Q.Q.; He, H.; Sun, F.C. Critical Review on the Battery State of Charge Estimation Methods for Electric Vehicles. IEEE Access 2017, 6, 1832–1843. [Google Scholar] [CrossRef]
- Leising, R.A.; Palazzo, M.J.; Takeuchi, E.S.; Takeuchi, K.J. Abuse testing of lithium-ion batteries: Characterization of the overcharge reaction of LiCoO2 graphite cells. J. Electrochem. Soc. 2001, 148, A838. [Google Scholar] [CrossRef]
- Saito, Y.; Takano, K.; Negishi, A. Thermal behaviors of lithium-ion cells during overcharge. J. Power Sources 2001, 97, 693–696. [Google Scholar] [CrossRef]
- Lin, C.K.; Ren, Y.; Amine, K.; Qin, Y.; Chen, Z.H. In situ high-energy X-ray diffraction to study overcharge abuse of 18650-size lithium-ion battery. J. Power Sources 2013, 230, 32–37. [Google Scholar] [CrossRef]
- Yang, B.; Cui, N.; Wang, M. Internal Short Circuit Fault Diagnosis for Lithiumion Battery Based on Voltage and Temperature. In Proceedings of the 2019 3rd Conference on Vehicle Control and Intelligence (CVCI), Hefei, China, 21–22 September 2019; pp. 1–6. [Google Scholar]
- Wu, C.; Zhu, C.B.; Ge, Y.W.; Zhao, Y.P. A Review on Fault Mechanism and Diagnosis Approach for Li-Ion Batteries. J. Nanomater. 2015, 2015, 631263. [Google Scholar] [CrossRef]
- Cai, W.; Wang, H.; Maleki, H.; Howard, J.; Lara-Curzio, E. Experimental simulation of internal short circuit in Li-ion and Li-ion-polymer cells. J. Power Sources 2011, 196, 7779–7783. [Google Scholar] [CrossRef]
- Orendorff, C.J.; Roth, E.P.; Nagasubramanian, G. Experimental triggers for internal short circuits in lithium-ion cells. J. Power Sources 2011, 196, 6554–6558. [Google Scholar] [CrossRef]
- Larsson, F.; Mellander, B.E. Abuse by External Heating, Overcharge and Short Circuiting of Commercial Lithium-Ion Battery Cells. J. Electrochem. Soc. 2014, 161, A1611–A1617. [Google Scholar] [CrossRef]
- Li, H.F.; Gao, J.K.; Zhang, S.L. Effect of overdischarge on swelling and recharge performance of lithium ion cells. Chin. J. Chem. 2008, 26, 1585–1588. [Google Scholar] [CrossRef]
- Li, J.Q.; Sun, D.N.; Jin, X.; Shi, W.T.; Sun, C. Lithium-ion battery overcharging thermal characteristics analysis and an impedance-based electro-thermal coupled model simulation. Appl. Energy 2019, 254, 113574. [Google Scholar] [CrossRef]
- Feng, X.N.; Lu, L.G.; Ouyang, M.G.; Li, J.Q.; He, X.M. A 3D thermal runaway propagation model for a large format lithium-ion battery module. Energy 2016, 115, 194–208. [Google Scholar] [CrossRef]
- Ren, D.; Feng, X.; Liu, L.; Hsu, H.; Lu, L.; Wang, L.; He, X.; Ouyang, M. Investigating the relationship between internal short circuit and thermal runaway of lithium-ion batteries under thermal abuse condition. Energy Storage Mater. 2021, 34, 563–573. [Google Scholar] [CrossRef]
- Jindal, P.; Bhattacharya, J. Review-Understanding the Thermal Runaway Behavior of Li-Ion Batteries through Experimental Techniques. J. Electrochem. Soc. 2019, 166, A2165–A2193. [Google Scholar] [CrossRef]
- Hu, X.S.; Zhang, K.; Liu, K.L.; Lin, X.K.; Dey, S.; Onori, S. Advanced Fault Diagnosis for Lithium-Ion Battery Systems: A Review of Fault Mechanisms, Fault Features, and Diagnosis Procedures. IEEE Ind. Electron. Mag. 2020, 14, 65–91. [Google Scholar] [CrossRef]
- Yang, F.; Xiao, D. Model and Fault Inference with the Framework of Probabilistic SDG. In Proceedings of the 2006 9th International Conference on Control, Automation, Robotics and Vision, Singapore, 5–8 December 2006; pp. 1–6. [Google Scholar]
- Held, M.; Brönnimann, R. Safe cell, safe battery? Battery fire investigation using FMEA, FTA and practical experiments. Microelectron. Reliab. 2016, 64, 705–710. [Google Scholar] [CrossRef]
- Filippetti, F.; Martelli, M.; Franceschini, G.; Tassoni, C. Development of expert system knowledge base to on-line diagnosis of rotor electrical faults of induction motors. In Proceedings of the Conference Record of the 1992 IEEE Industry Applications Society Annual Meeting, Houston, TX, USA, 31 December 1992; Volume 1, pp. 92–99. [Google Scholar]
- Xia, B.; Chen, Z.; Mi, C.; Robert, B. External short circuit fault diagnosis for lithium-ion batteries. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo (ITEC), Beijing, China, 31 August–3 September 2014; pp. 1–7. [Google Scholar]
- Duan, B.; Li, Z.Y.; Gu, P.W.; Zhou, Z.K.; Zhang, C.H. Evaluation of battery inconsistency based on information entropy. J. Energy Storage 2018, 16, 160–166. [Google Scholar] [CrossRef]
- Isermann, R. Model-based fault-detection and diagnosis—Status and applications. Annu. Rev. Control 2005, 29, 71–85. [Google Scholar] [CrossRef]
- Hwang, I.; Kim, S.; Kim, Y.; Seah, C.E. A Survey of Fault Detection, Isolation, and Reconfiguration Methods. IEEE Trans. Control Syst. Technol. 2010, 18, 636–653. [Google Scholar] [CrossRef]
- Son, J.; Du, Y. Model-Based Stochastic Fault Detection and Diagnosis of Lithium-Ion Batteries. Processes 2019, 7, 38. [Google Scholar] [CrossRef]
- Dey, S.; Biron, Z.A.; Tatipamula, S.; Das, N.; Mohon, S.; Ayalew, B.; Pisu, P. Model-based real-time thermal fault diagnosis of Lithium-ion batteries. Control Eng. Pract. 2016, 56, 37–48. [Google Scholar] [CrossRef]
- Yang, R.X.; Xiong, R.; He, H.W.; Chen, Z.Y. A fractional-order model-based battery external short circuit fault diagnosis approach for all-climate electric vehicles application. J. Clean. Prod. 2018, 187, 950–959. [Google Scholar] [CrossRef]
- Zhang, H.; Pei, L.; Sun, J.; Song, K.; Lu, R.; Zhao, Y.; Zhu, C.; Wang, T. Online Diagnosis for the Capacity Fade Fault of a Parallel-Connected Lithium-Ion Battery Group. Energies 2016, 9, 387. [Google Scholar] [CrossRef]
- Gong, X.; Xiong, R.; Mi, C.C. A Data-Driven Bias-Correction-Method-Based Lithium-Ion Battery Modeling Approach for Electric Vehicle Applications. IEEE Trans. Ind. Appl. 2016, 52, 1759–1765. [Google Scholar]
- Kim, G.H.; Smith, K.; Ireland, J.; Pesaran, A. Fail-safe design for large capacity lithium-ion battery systems. J. Power Sources 2012, 210, 243–253. [Google Scholar] [CrossRef]
- Li, X.Y.; Wang, Z.P.; Zhang, L. Co-estimation of capacity and state-of-charge for lithium-ion batteries in electric vehicles. Energy 2019, 174, 33–44. [Google Scholar] [CrossRef]
- Wang, Y.J.; Tian, J.Q.; Chen, Z.H.; Liu, X.T. Model based insulation fault diagnosis for lithium-ion battery pack in electric vehicles. Measurement 2019, 131, 443–451. [Google Scholar] [CrossRef]
- Liu, Z.T.; He, H.W. Sensor fault detection and isolation for a lithium-ion battery pack in electric vehicles using adaptive extended Kalman filter. Appl. Energy 2017, 185, 2033–2044. [Google Scholar] [CrossRef]
- Hong, J.C.; Wang, Z.P.; Liu, P. Big-Data-Based Thermal Runaway Prognosis of Battery Systems for Electric Vehicles. Energies 2017, 10, 919. [Google Scholar] [CrossRef]
- Zhang, G.; Li, D.; Liu, P.; Zhang, Z. Multi-dimension Fault Diagnosis of Battery System in Electric Vehicles Based on Real-world Thermal Runaway Vehicle Data. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 21–23 November 2019; pp. 2830–2835. [Google Scholar]
- Li, D.; Liu, P.; Zhang, Z.; Zhang, L.; Deng, J.; Wang, Z.; Dorrell, D.G.; Li, W.; Sauer, D.U. Battery Thermal Runaway Fault Prognosis in Electric Vehicles Based on Abnormal Heat Generation and Deep Learning Algorithms. IEEE Trans. Power Electron. 2022, 37, 8513–8525. [Google Scholar] [CrossRef]
- Li, Z.X.; Yang, Y.; Li, L.W.; Wang, D.Q. A weighted Pearson correlation coefficient based multi-fault comprehensive diagnosis for battery circuits. J. Energy Storage 2023, 60, 106584. [Google Scholar] [CrossRef]
- Yang, N.; Xu, C.L.; Fang, R.; Li, H.L.; Xie, H. Capacity Failure Prediction of Lithium Batteries for Vehicles Based on Large Data. In Proceedings of the International Conference on Optoelectronic Science and Materials (ICOSM), Hefei, China, 25–27 September 2020; Volume 11606, p. 1160609. [Google Scholar]
- Zhao, X.; Wang, L.; Wang, X.; Sun, Y.; Jiang, T.; Li, Z.; Zhang, Y. Reliable Life Prediction and Evaluation Analysis of Lithium-ion Battery Based on Long-Short Term Memory Model. In Proceedings of the 2019 IEEE 19th International Conference on Software Quality, Reliability and Security Companion (QRS-C), Sofia, Bulgaria, 22–26 July 2019; pp. 507–509. [Google Scholar]
- Kang, Y.Z.; Duan, B.; Zhou, Z.K.; Shang, Y.L.; Zhang, C.H. Online multi-fault detection and diagnosis for battery packs in electric vehicles. Appl. Energy 2020, 259, 114170. [Google Scholar] [CrossRef]
- Hu, X.; Jiang, J.; Cao, D.; Egardt, B. Battery Health Prognosis for Electric Vehicles Using Sample Entropy and Sparse Bayesian Predictive Modeling. IEEE Trans. Ind. Electron. 2016, 63, 2645–2656. [Google Scholar] [CrossRef]
- Friedman, J.H. Greedy Function Approximation: A Gradient Boosting Machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Liu, F.T.; Ting, K.M.; Zhou, Z.H. Isolation Forest. In Proceedings of the 8th IEEE International Conference on Data Mining, Pisa, Italy, 15–19 December 2008; p. 413. [Google Scholar]
- Hong, J.C.; Wang, Z.P.; Yao, Y.T. Fault prognosis of battery system based on accurate voltage abnormity prognosis using long short-term memory neural networks. Appl. Energy 2019, 251, 113381. [Google Scholar] [CrossRef]
- Rakhmatov, D.N. Battery voltage prediction for portable systems. In Proceedings of the 2005 IEEE International Symposium on Circuits and Systems, Kobe, Japan, 23–26 May 2005; Volume 4, pp. 4098–4101. [Google Scholar]
- Zhao, R.X.; Kollmeyer, P.J.; Lorenz, R.D.; Jahns, T.M. A Compact Methodology Via a Recurrent Neural Network for Accurate Equivalent Circuit Type Modeling of Lithium-Ion Batteries. IEEE Trans. Ind. Appl. 2019, 55, 1922–1931. [Google Scholar] [CrossRef]
- Tobar, F.; Castro, I.; Silva, J.; Orchard, M. Improving battery voltage prediction in an electric bicycle using altitude measurements and kernel adaptive filters. Pattern Recognit. Lett. 2018, 105, 200–206. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Xiong, R.; Lu, J.H.; Li, X.G. Temperature rise prediction of lithium-ion battery suffering external short circuit for all-climate electric vehicles application. Appl. Energy 2018, 213, 375–383. [Google Scholar] [CrossRef]
- Sun, J.; Wei, G.; Pei, L.; Lu, R.; Song, K.; Wu, C.; Zhu, C. Online Internal Temperature Estimation for Lithium-Ion Batteries Based on Kalman Filter. Energies 2015, 8, 4400–4415. [Google Scholar] [CrossRef]
- Meng, J.; Luo, G.; Gao, F. Lithium Polymer Battery State-of-Charge Estimation Based on Adaptive Unscented Kalman Filter and Support Vector Machine. IEEE Trans. Power Electron. 2016, 31, 2226–2238. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Ahmed, R.; Emadi, A. Long Short-Term Memory Networks for Accurate State-of-Charge Estimation of Li-ion Batteries. IEEE Trans. Ind. Electron. 2018, 65, 6730–6739. [Google Scholar] [CrossRef]
- Lee, Y.S.; Wang, W.Y.; Kuo, T.Y. Soft computing for battery state-of-charge (BSOC)—Estimation in battery string systems. IEEE Trans. Ind. Electron. 2008, 55, 229–239. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Positive Electrode Material | Battery Performance Characteristics |
|---|---|---|
| LCO | LiCoO2 | High voltage (3.9 V), higher specific energy, but there is a safety hazard of fire |
| LMO | LiMn2O4 | The voltage and specific energy are close to those of LCO, the capacity declines quickly, and the thermal stability is poor. |
| LFP | LiFePO4 | it exhibits commendable safety features, accompanied by a high power density, albeit with a lower energy density. Moreover, it demonstrates favorable thermal stability. |
| NCA | Li0.8Co0.15Al0.05O2 | The voltage is slightly lower than LCO, the safety is better than LCO, and the cycle life characteristics are good |
| NMC | LiNi1−x−yCoxMnyO2 | Its security is between NCA and LMO, and its capacity declines faster than NCA |
| Parameters | Date |
|---|---|
| Total Mass | 2058 |
| Electric Motor | PM50W01 |
| Rated Power | 50 KW |
| Vehicle Length/Width/Height | 4582/1794/1515 |
| Algorithm | MSE | PTS |
|---|---|---|
| Linear Regression | 1.06 × 10−3 | 1 |
| SVM | 5.21 × 10−3 | 1 |
| Random Forest | 4.86 × 10−4 | 36 |
| LightGBM | 6.28 × 10−4 | 36 |
| XGBoost | 2.12 × 10−4 | 36 |
| LSTM [43] | 7.04 × 10−3 | 6 |
| GBDT | 2.03 × 10−4 | 36 |
| Modified GBDT (proposed in this paper) | 1.73 × 10−4 | 36 |
| Method | Parameters | MRE |
|---|---|---|
| Battery model based on simplified physical analysis [44] | Voltage prediction | MRE < 3.7% |
| LSTM-RNN battery model [45] | MRE < 4.8% | |
| KLMS-X filter algorithm [46] | MRE < 4.5% | |
| A two-step prediction approach for temperature rise [47] | Temperature prediction | MRE < 3.05% |
| Kalman Filter [48] | MRE < 3.21% | |
| AUKF with LSSVM battery model [49] | SOC prediction | MRE < 2% |
| LSTM-RNN battery model [50] | MRE < 0.64% | |
| Fuzzy NN with genetic algorithm [51] | MRE < 0.83% | |
| The modified GBDT model (proposed in this paper) | Voltage prediction | MRE < 0.35% |
| Temperature prediction | MRE < 0.76% | |
| SOC prediction | MRE < 0.47 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Dong, S.; Li, D.; Liu, P.; Wang, Z. Prediction and Diagnosis of Electric Vehicle Battery Fault Based on Abnormal Voltage: Using Decision Tree Algorithm Theories and Isolated Forest. Processes 2024, 12, 136. https://doi.org/10.3390/pr12010136
Zhang Z, Dong S, Li D, Liu P, Wang Z. Prediction and Diagnosis of Electric Vehicle Battery Fault Based on Abnormal Voltage: Using Decision Tree Algorithm Theories and Isolated Forest. Processes. 2024; 12(1):136. https://doi.org/10.3390/pr12010136
Chicago/Turabian StyleZhang, Zhaosheng, Shiji Dong, Da Li, Peng Liu, and Zhenpo Wang. 2024. "Prediction and Diagnosis of Electric Vehicle Battery Fault Based on Abnormal Voltage: Using Decision Tree Algorithm Theories and Isolated Forest" Processes 12, no. 1: 136. https://doi.org/10.3390/pr12010136
APA StyleZhang, Z., Dong, S., Li, D., Liu, P., & Wang, Z. (2024). Prediction and Diagnosis of Electric Vehicle Battery Fault Based on Abnormal Voltage: Using Decision Tree Algorithm Theories and Isolated Forest. Processes, 12(1), 136. https://doi.org/10.3390/pr12010136