
Tracking Differentiator-Based Identification Method for Temperature Predictive Control of Uncooled Heating Processes



Abstract
:1. Introduction
2. Tracking Differentiator-Based Identification for Uncooled Heating Processes
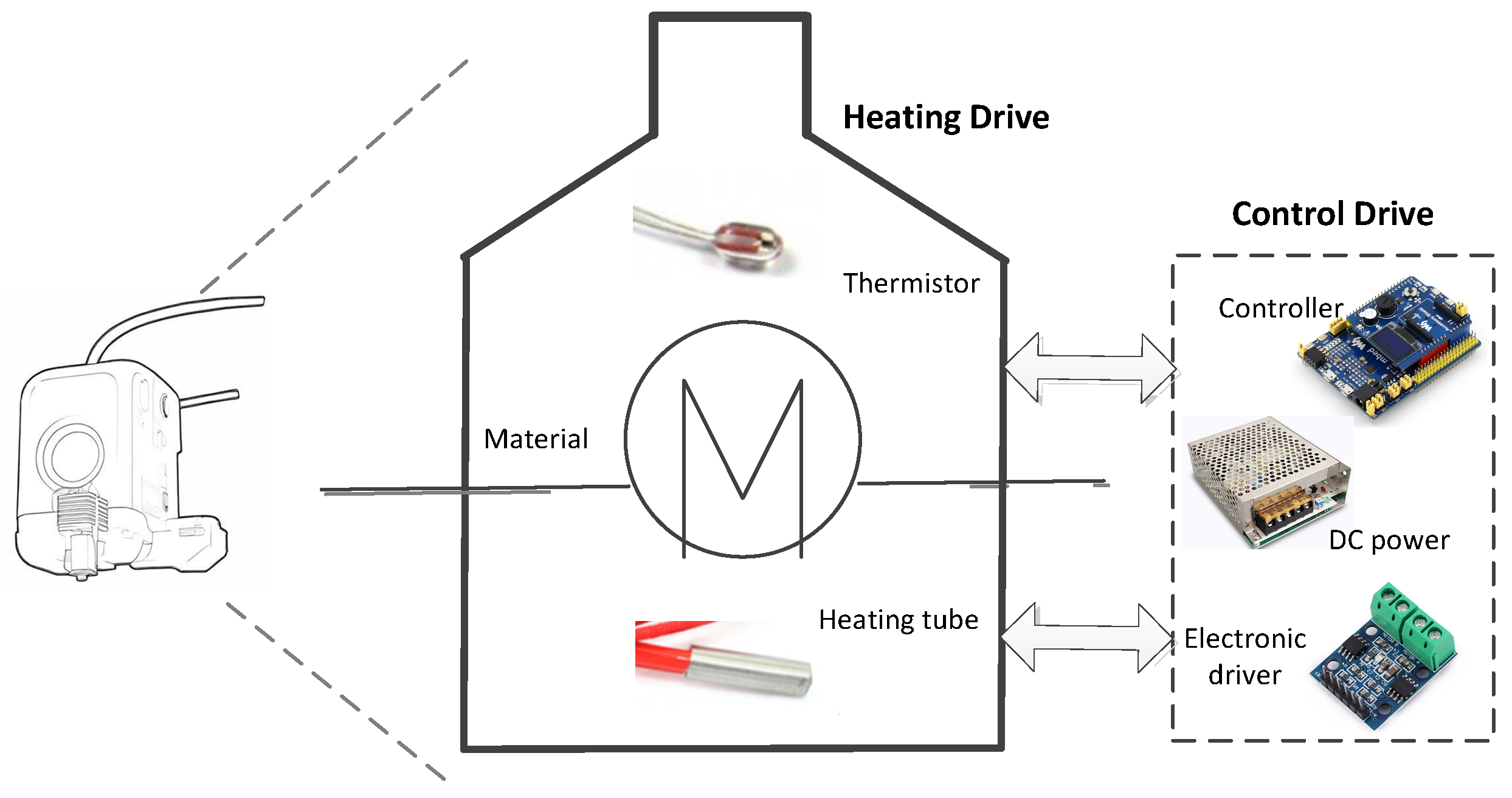
2.1. Uncooled Heating Processes
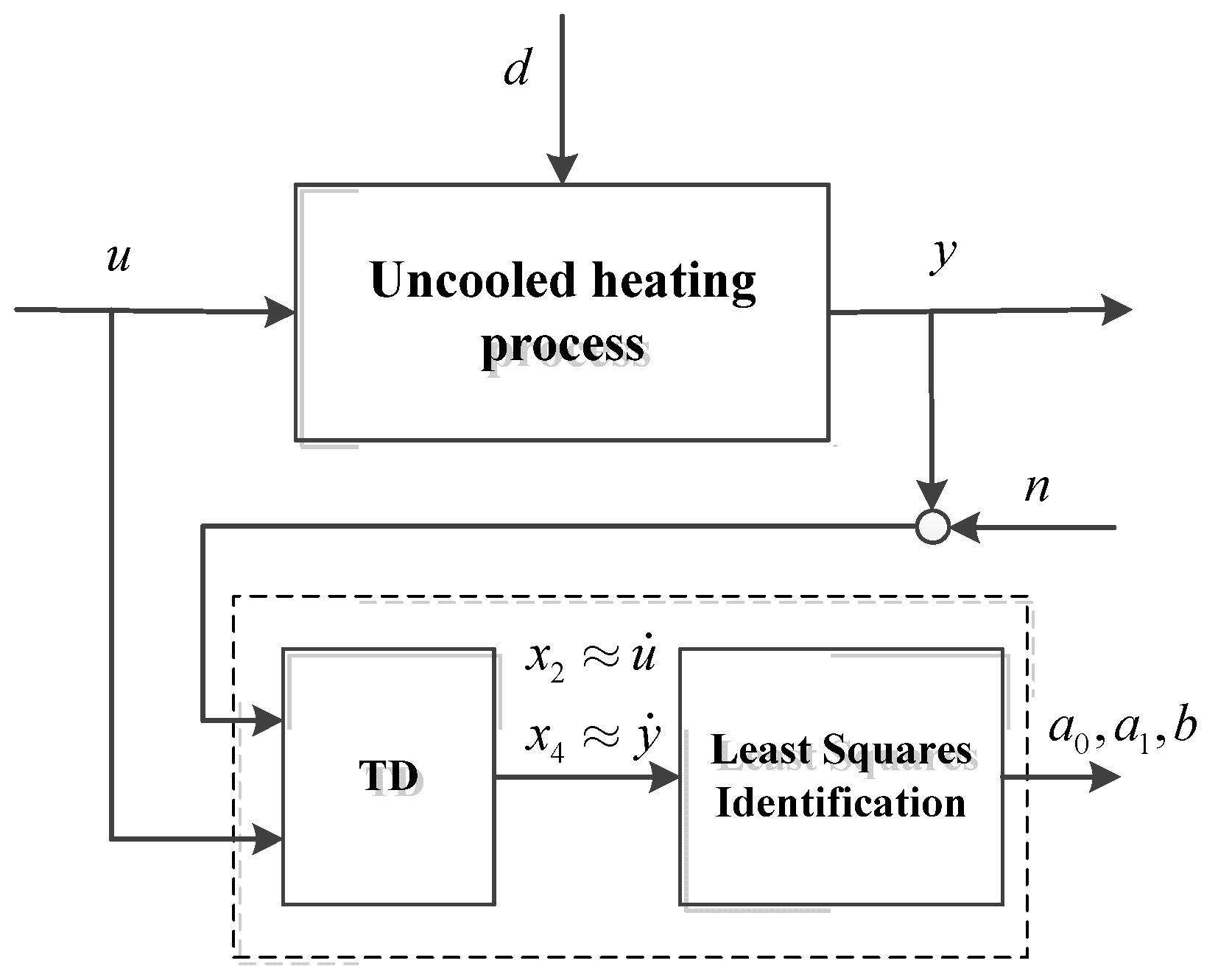
2.2. TD-Based Identification Method against Disturbance
| Algorithm 1: Anti-disturbance Identification based on TD |
| Input: Input signal (), Sampling period ( s), Bandwidth parameter (). Output: Identified model parameters ( ). 1: Operate TD (4) with bandwidth ; 2: Collect the data ; 3: Construct data matrix: ; 4: Perform LSE with to identify model parameters ; 5: Calculate by (5). |
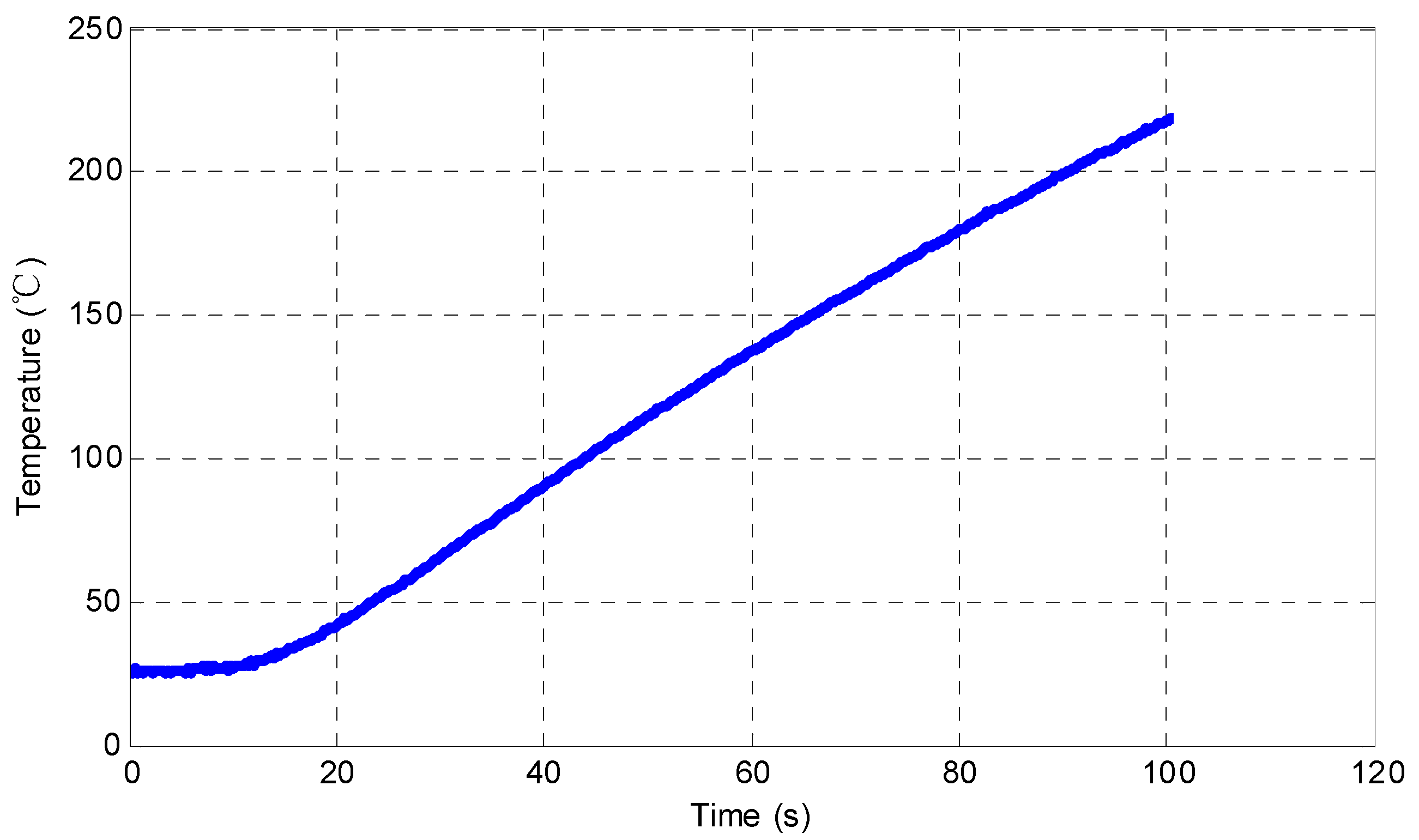
2.3. Identification Results
3. Uncooled Control Constraints and Temperature Prediction Control
3.1. Uncooled Control Constraints
3.2. Input-Constrained Temperature Prediction Control (ICTPC)
4. Temperature Control and Experimental Results
4.1. Experiment Conditions
4.2. Weight Design in Controller
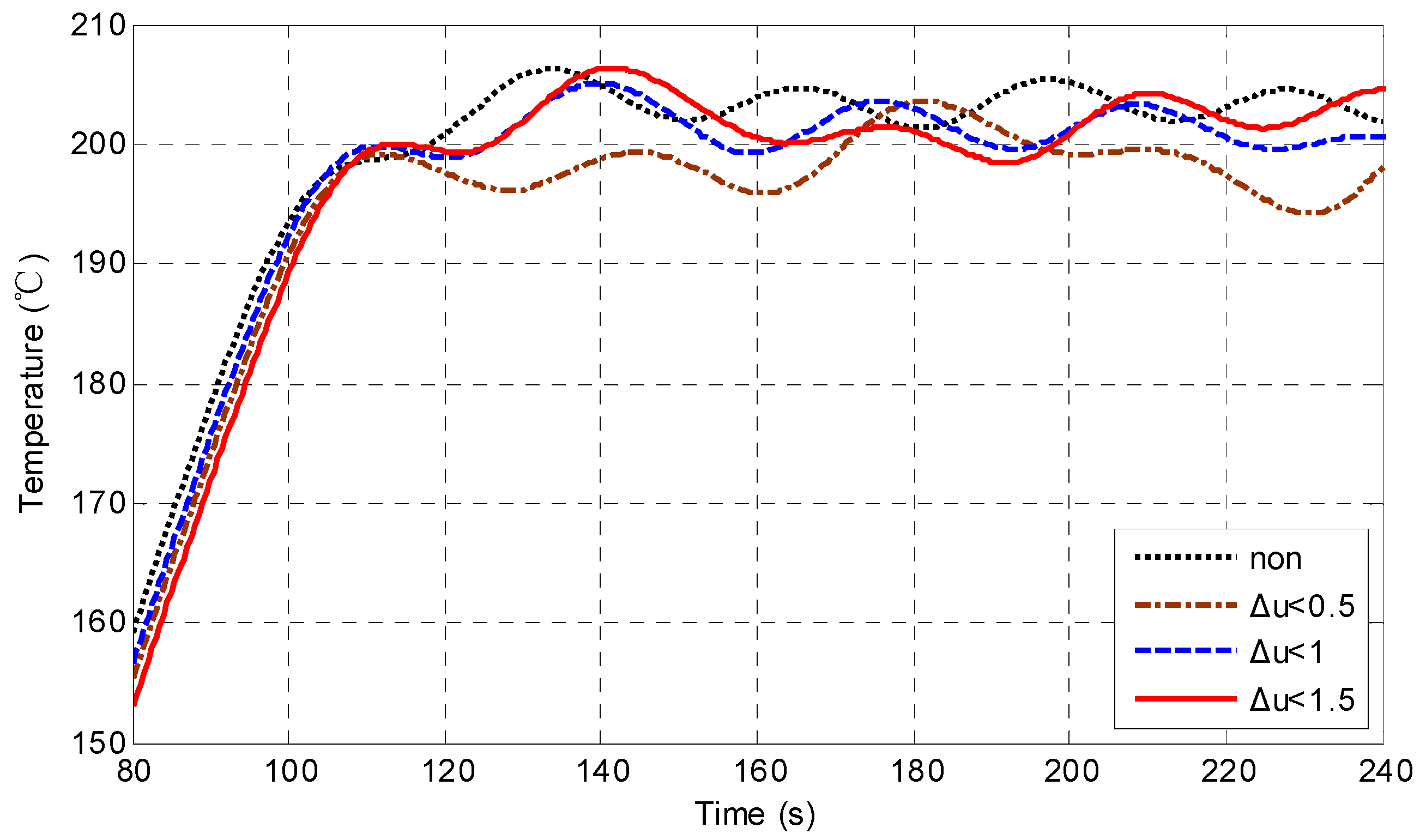
4.3. Experimental Results and Comparisons
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Seborg, D.E.; Edgar, T.F.; Mellichamp, D.A.; Doyle, F.J., III. Process Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Pastukhov, V.G.; Maydanik, Y.F. Temperature control of a heat source using a loop heat pipe integrated with a thermoelectric converter. Int. J. Therm. Sci. 2023, 184, 108012. [Google Scholar] [CrossRef]
- Grassi, E.; Tsakalis, K. PID controller tuning by frequency loop-shaping: Application to diffusion furnace temperature control. IEEE Trans. Control. Syst. Technol. 2000, 8, 842–847. [Google Scholar] [CrossRef]
- Kumavat, M.; Thale, S. Analysis of CSTR Temperature Control with PID, MPC & Hybrid MPC-PID Controller. In Proceedings of the International Conference on Automation, Computing and Communication 2022 (ICACC-2022), Nerul, India, 7–8 April 2022; p. 01001. [Google Scholar]
- Taler, D.; Sobota, T.; Jaremkiewicz, M.; Taler, J. Control of the temperature in the hot liquid tank by using a digital PID controller considering the random errors of the thermometer indications. Energy 2022, 239, 122771. [Google Scholar] [CrossRef]
- Panda, R.C.; Yu, C.C.; Huang, H.P. PID tuning rules for SOPDT systems: Review and some new results. ISA Trans. 2004, 43, 283–295. [Google Scholar] [CrossRef] [PubMed]
- Nie, Z.Y.; Li, Z.; Wang, Q.G.; Gao, Z.; Luo, J. A unifying Ziegler–Nichols tuning method based on active disturbance rejection. Int. J. Robust Nonlinear Control. 2022, 32, 9525–9541. [Google Scholar] [CrossRef]
- Vanavil, B.; Chaitanya, K.K.; Rao, A.S. Improved PID controller design for unstable time delay processes based on direct synthesis method and maximum sensitivity. Int. J. Syst. Sci. 2015, 46, 1349–1366. [Google Scholar] [CrossRef]
- Shamsuzzoha, M.; Lee, M. IMC−PID controller design for improved disturbance rejection of time-delayed processes. Ind. Eng. Chem. Res. 2007, 46, 2077–2091. [Google Scholar] [CrossRef]
- Huang, H.; Zhang, S.; Yang, Z.; Tian, Y.; Zhao, X.; Yuan, Z.; Hao, S.; Leng, J.; Wei, Y. Modified smith fuzzy pid temperature control in an oil-replenishing device for deep-sea hydraulic system. Ocean. Eng. 2018, 149, 14–22. [Google Scholar] [CrossRef]
- Duan, X.G.; Deng, H.; Li, H.X. A Saturation-Based Tuning Method for Fuzzy PID Controller. IEEE Trans Ind. Electron. 2013, 60, 5177–5185. [Google Scholar] [CrossRef]
- Liu, R.; Nie, Z.Y.; Shao, H.; Fang, H.; Luo, J.L. Active disturbance rejection control for non-minimum phase systems under plant reconstruction. ISA Trans. 2023, 134, 497–510. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.E.; Li, D.; Xue, Y. Active disturbance rejection control for the ALSTOM gasifier benchmark problem. Control. Eng. Pract. 2013, 21, 556–564. [Google Scholar] [CrossRef]
- Zhang, R.; Zou, Q.; Cao, Z.; Gao, F. Design of fractional order modeling based extended non-minimal state space MPC for temperature in an industrial electric heating furnace. J. Process Control 2017, 56, 13–22. [Google Scholar] [CrossRef]
- Ramasamy, V.; Kannan, R.; Muralidharan, G.; Sidharthan, R.K.; Veerasamy, G.; Venkatesh, S.; Amirtharajan, R. A comprehensive review on Advanced Process Control of cement kiln process with the focus on MPC tuning strategies. J. Process Control 2023, 121, 85–102. [Google Scholar] [CrossRef]
- Li, J.; Yang, S.; Yu, T.; Zhang, X. Data-driven optimal PEMFC temperature control via curriculum guidance strategy-based large-scale deep reinforcement learning. IET Renew. Power Gener. 2022, 16, 1283–1298. [Google Scholar] [CrossRef]
- Nie, Z.Y.; Li, G.M.; Yan, L.C.; Wang, Q.G.; Luo, J.L. On disturbance rejection proportional–integral–differential control with model-free adaptation. Control. Theory Technol. 2023, 21, 34–45. [Google Scholar] [CrossRef]
- Aslam, S.; Hannan, S.; Zafar, W.; Sajjad, M.U. Temperature control of water-bath system in presence of constraints by using MPC. Int. J. Adv. Appl. Sci. 2016, 3, 62–68. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Mayne, D.Q. Model Predictive Control: Theory and Design; Nob Hill Pub., LLC: Madison, WI, USA, 2009. [Google Scholar]
- Rawlings, J.B. Tutorial overview of model predictive control. IEEE Control. Syst. Mag. 2002, 20, 38–52. [Google Scholar]
- Bhavsar, S.; Kant, K.; Pitchumani, R. Robust model-predictive thermal control of lithium-ion batteries under drive cycle uncertainty. J. Power Sources 2023, 557, 232496. [Google Scholar] [CrossRef]
- Li, Z.; Wang, X.; Du, W.; Yang, M.; Li, Z.; Liao, P. Data-driven adaptive predictive control of hydrocracking process using a covariance matrix adaption evolution strategy. Control. Eng. Pract. 2022, 125, 105222. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
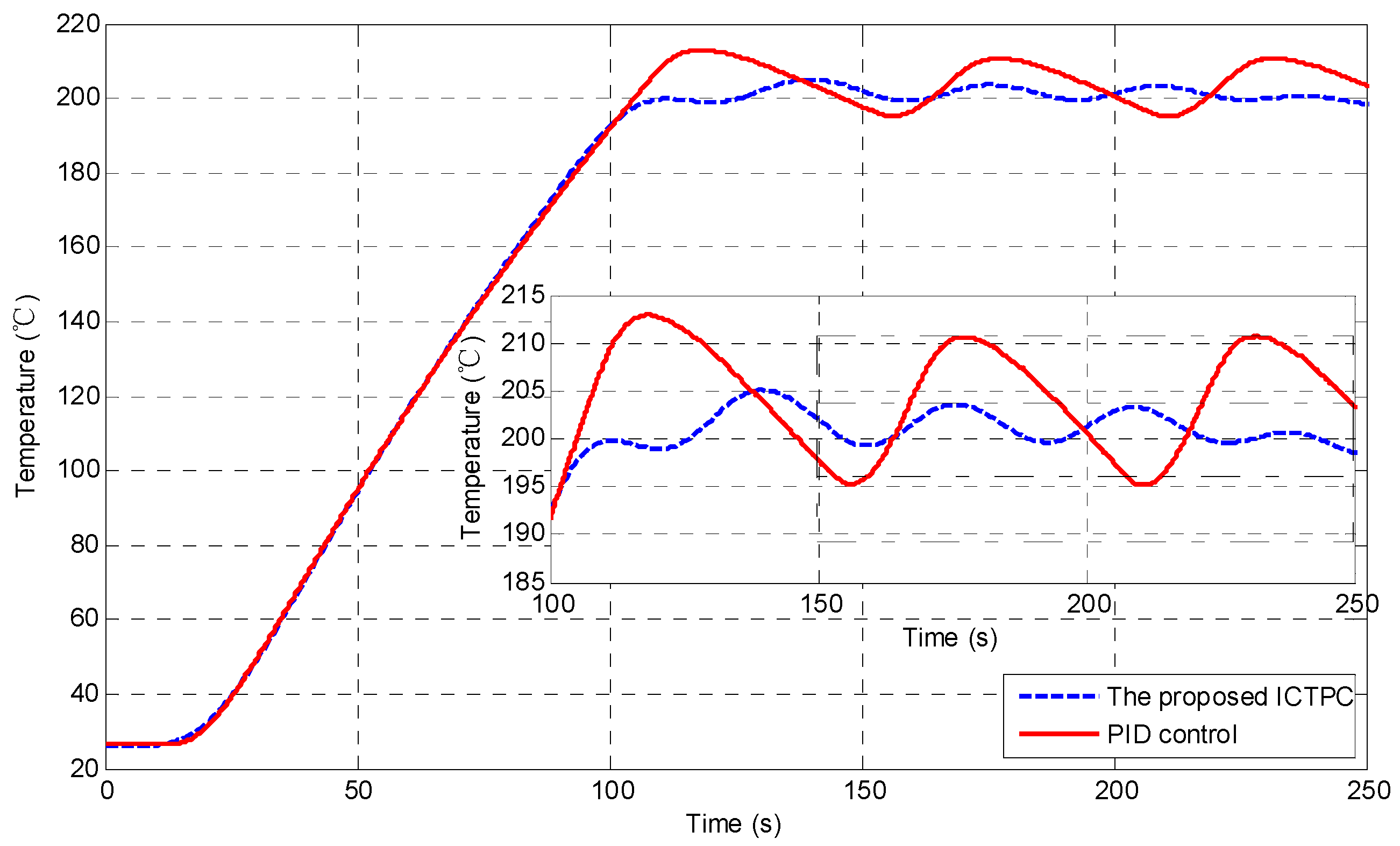
| Control Strategy | Overshoot | Peak Time | Steady-State Error |
|---|---|---|---|
| PID control | 7.1% | 118 s | 11 °C |
| The proposed ICTPC | 3.0% | 110 s | 4 °C |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, S.; Chen, G.; Dong, Y.; Fan, C.; Nie, Z. Tracking Differentiator-Based Identification Method for Temperature Predictive Control of Uncooled Heating Processes. Processes 2024, 12, 2137. https://doi.org/10.3390/pr12102137
Hua S, Chen G, Dong Y, Fan C, Nie Z. Tracking Differentiator-Based Identification Method for Temperature Predictive Control of Uncooled Heating Processes. Processes. 2024; 12(10):2137. https://doi.org/10.3390/pr12102137
Chicago/Turabian StyleHua, Shan, Gang Chen, Yanni Dong, Changhao Fan, and Zhuoyun Nie. 2024. "Tracking Differentiator-Based Identification Method for Temperature Predictive Control of Uncooled Heating Processes" Processes 12, no. 10: 2137. https://doi.org/10.3390/pr12102137