

Health Management of Bearings Using Adaptive Parametric VMD and Flying Squirrel Search Algorithms to Optimize SVM

Abstract
1. Introduction
- (1)
- Because the feature extraction capability of VMD algorithm depends on parameter selection, and the traditional optimization method has the problems of manual parameter selection, long parameter optimization time and inaccurate fault feature extraction, SSA is used to optimize parameters in VMD. To solve the problem of increasing algorithm time due to too long parameter optimization, KPCA dimension reduction is carried out to extract features. It can not only shorten the overall algorithm time, but also filter effective features and improve the feature extraction capability of VMD.
- (2)
- In the fault diagnosis classification stage, the excellent optimization ability of SSA is used again to optimize the parameters of SVM. The bearing data set is used for experimental simulation and compared with other intelligent optimization algorithms to verify its effectiveness.
- (3)
- Bearing health status assessment stage is also an important part of health management. Integrating cosine similarity into the root mean square value can effectively select the failure threshold. Based on the SSA-SVM model proposed above, different health status samples can be divided and the bearing health management process can be initially realized.
2. Brief Review of Basic Theory
2.1. Flying Squirrel Search Algorithm
- (1)
- The uniform distribution mode was adopted to initialize the position of the flying squirrel. According to different fitness, the position update formula of the flying squirrel was as follows:where FSat and FSht are the different initialization position of the flying mouse, dg is the gliding step length, Gc is the sliding constant. rand is a random number in the range [0, 1]. Pdp is the probability of predator occurrence, t is the number of iterations.
- (2)
- The seasonal evaluation condition is introduced, and the seasonal constant Sct is compared with the minimum seasonal change value Smin to determine whether it is in winter, which can prevent the algorithm from falling into local optimal. The formula is as follows:where k is the current dimension of the flying squirrel, d is the total dimension of the flying squirrel, tmax is the maximum number of iterations of the algorithm.
- (3)
- When the point meets the conditions of seasonal change, Levy flight is used to update the position of the flying squirrel, and the above process is repeated until the maximum number of iterations tmax is met, the algorithm stops and the optimal target value is output. The formula is as follows:
2.2. Adaptive Parameters VMD
- (1)
- Initialize SSA parameters, including basic parameters such as population size, number of iterations, and glide length.
- (2)
- The sparsity of vibration signal is represented by different envelope entropy values Ep, the smaller the entropy value is, the less the signal noise is, and the more abundant the fault feature information is. Therefore, the minimum envelope entropy minEp of IMF component decomposed by VMD is used as the fitness function of SSA, and the formula is as follows:where a(i) is the envelope signal after demodulation, pi is the result of the normalization of a(i), N is the number of the envelope signal after demodulation.
- (3)
- For flying mice that have not yet found a food source, their location is constantly updated according to Equation (1), which is close to hickory trees and oak trees.
- (4)
- Calculate the seasonal constant Sct under the current iterations and compare it with Smin, the minimum value of seasonal change. If the conditions of seasonal change are met, Levy flight is used to update the flying squirrel position, otherwise, return to step (2).
- (5)
- When the planting conditions are met, the calculation ends and the global minimum envelope entropy is obtained. The corresponding decomposition layer k and penalty factor α are the optimal parameters of VMD.
2.3. SVM of SSA Optimization Parameters
- (1)
- Initialize SSA parameters: population size, iteration times, gliding step length, predation probability, etc. Kernel function parameter g and penalty factor c are used as the initial position and optimization target of the flying mouse. Where, the kernel function parameter g is 0~100, and the penalty factor c is 0~100.
- (2)
- The average accuracy of the training set was obtained by using the K-fold cross-validation method, and the optimal average accuracy was taken as the fitness function, the fitness value was calculated and arranged in ascending order, and then the position of the flying squirrel in the pecan tree and the oak tree was determined as the global optimal solution and the local optimal solution respectively.
- (3)–(4)
- Steps (3)–(4) is basically the same as the steps (3)–(4) of building the adaptive parameter VMD, so it will not be repeated here.
- (5)
- When the stopping condition or the maximum number of iterations are met, the algorithm stops, and the position of the flying squirrel on the pecan tree is used as the global optimal solution to obtain the kernel function parameter g and the penalty factor c.
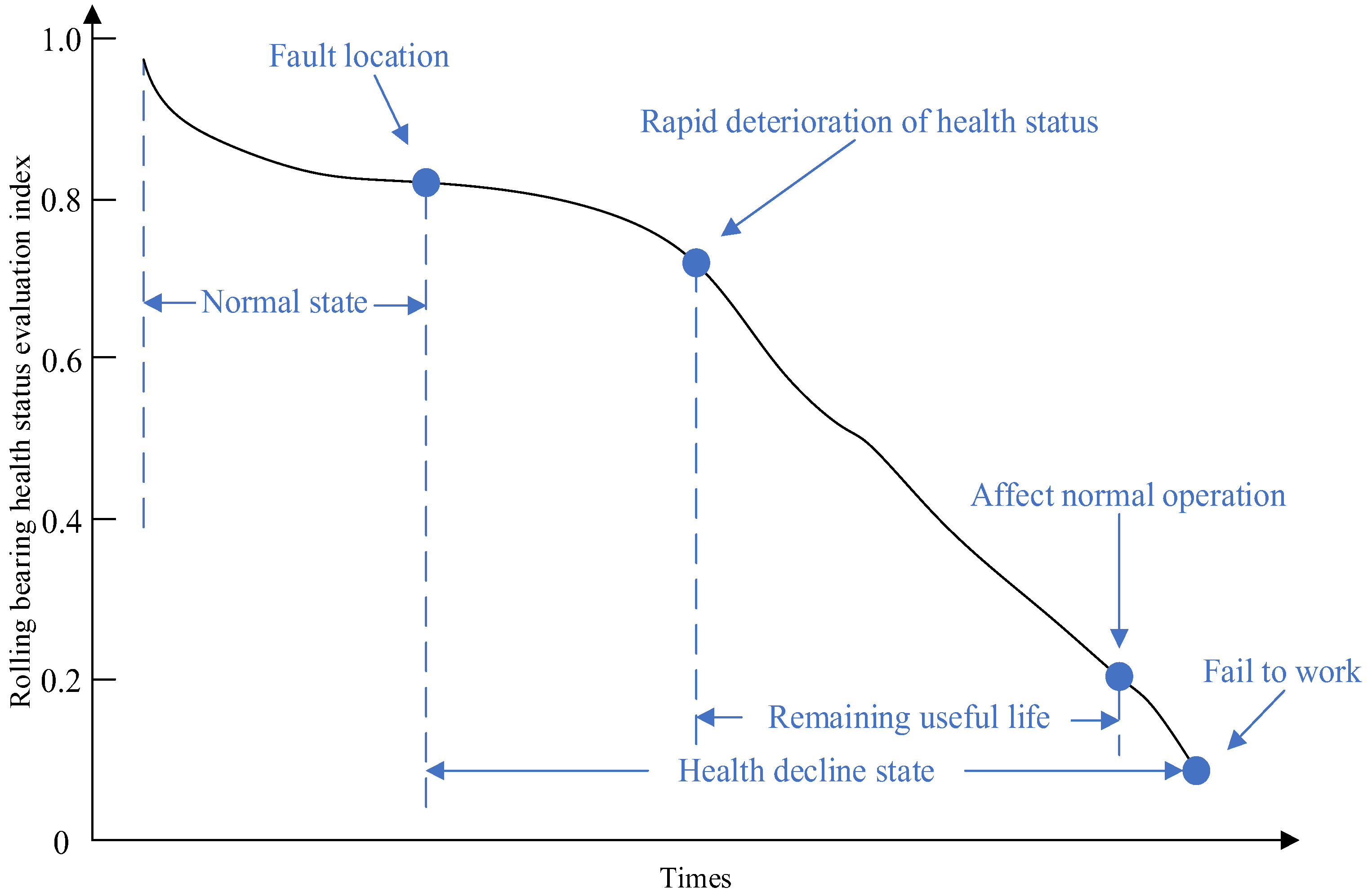
2.4. Health Status Assessment of Rolling Bearings
- (1)
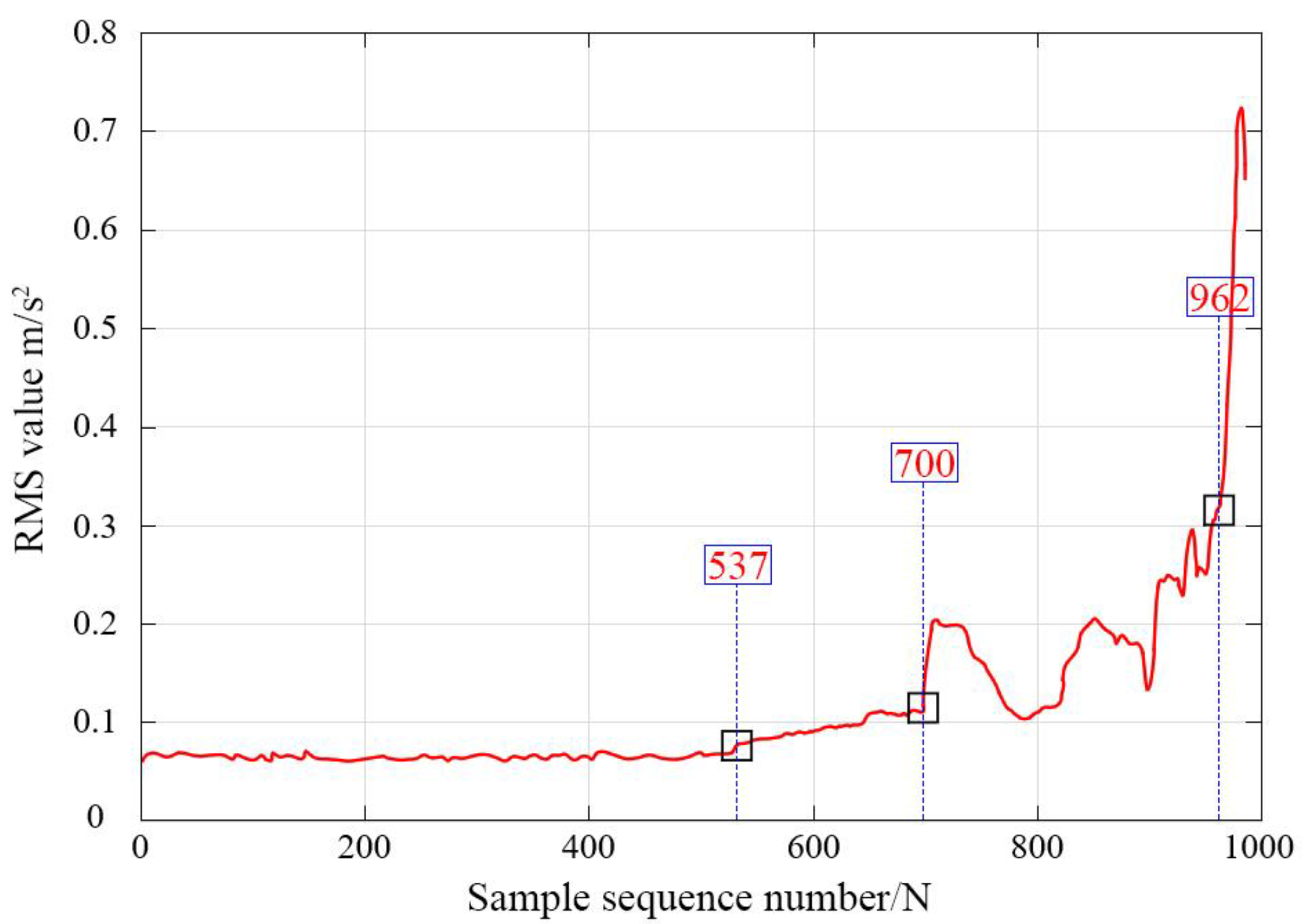
- Calculate the RMS Xrms of the bearing vibration signal data, and carry out five-point smoothing processing to eliminate the burr effect caused by noise to determine the change point of the influence state, and draw the RMS change curve of the whole life cycle. The formula is as follows:where xi is a vibration signal sampling value, N is the number of vibration signal sampling.
- (2)
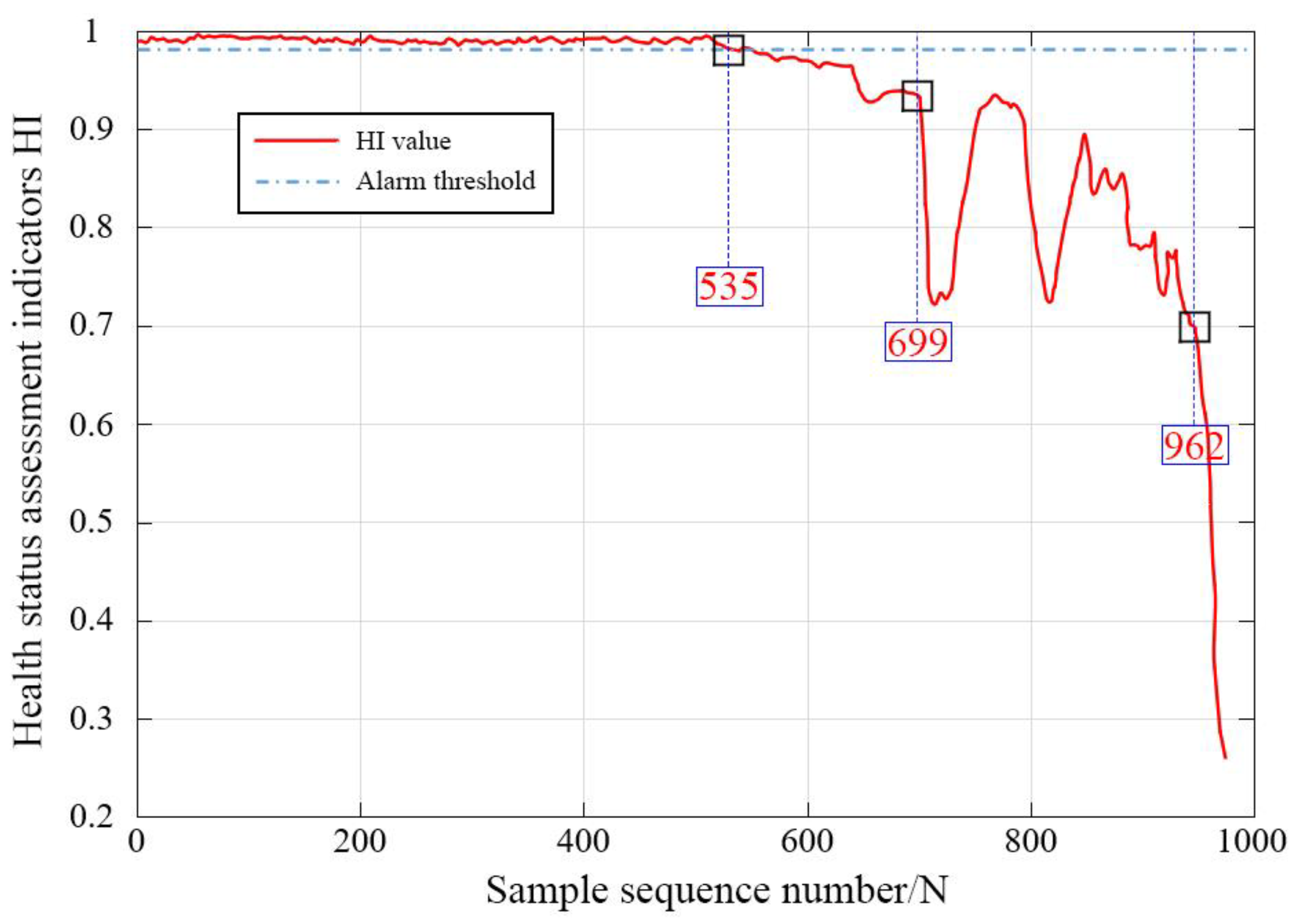
- The average of the RMS of the first 6 sample vibration signals after calculation is taken as the normal reference feature vector, and the CD between the feature vectors is calculated. Among them, the similarity between the feature vector to be measured and the normal reference feature vector can be judged by the cosine value of the Angle between them. The closer the cosine value is to 1, the smaller the included angle and the better the health state. Conversely, the smaller the cosine value, the closer the included Angle is to 90°, the worse the health state is. This feature is taken as the final health Index (HI), and plot a smooth curve of changes in health status. The formula is as follows:
- (3)
- The fault alarm threshold is set using the 3σ rule, and the HI is in line with the normal distribution, with the mean value set as and variance set as σ2. The probability that the distribution of HI for the normal state is within the interval ( − 3σ, + 3σ) is 99.73%. The mean value and variance are calculated as follows:where n is number of samples in normal working state, xi is the current normal sample HI.
- (4)
- The HI set in this paper shows a decreasing trend, so it is only necessary to calculate the lower limit + 3σ as the threshold value. When a certain HI value is less than the threshold, it proves that the rolling bearing will deviate from the normal state and enter the early fault state.
3. Bearing Health Management Model Based on SSA-SVM
3.1. Rolling Bearing Fault Diagnosis Model
- (1)
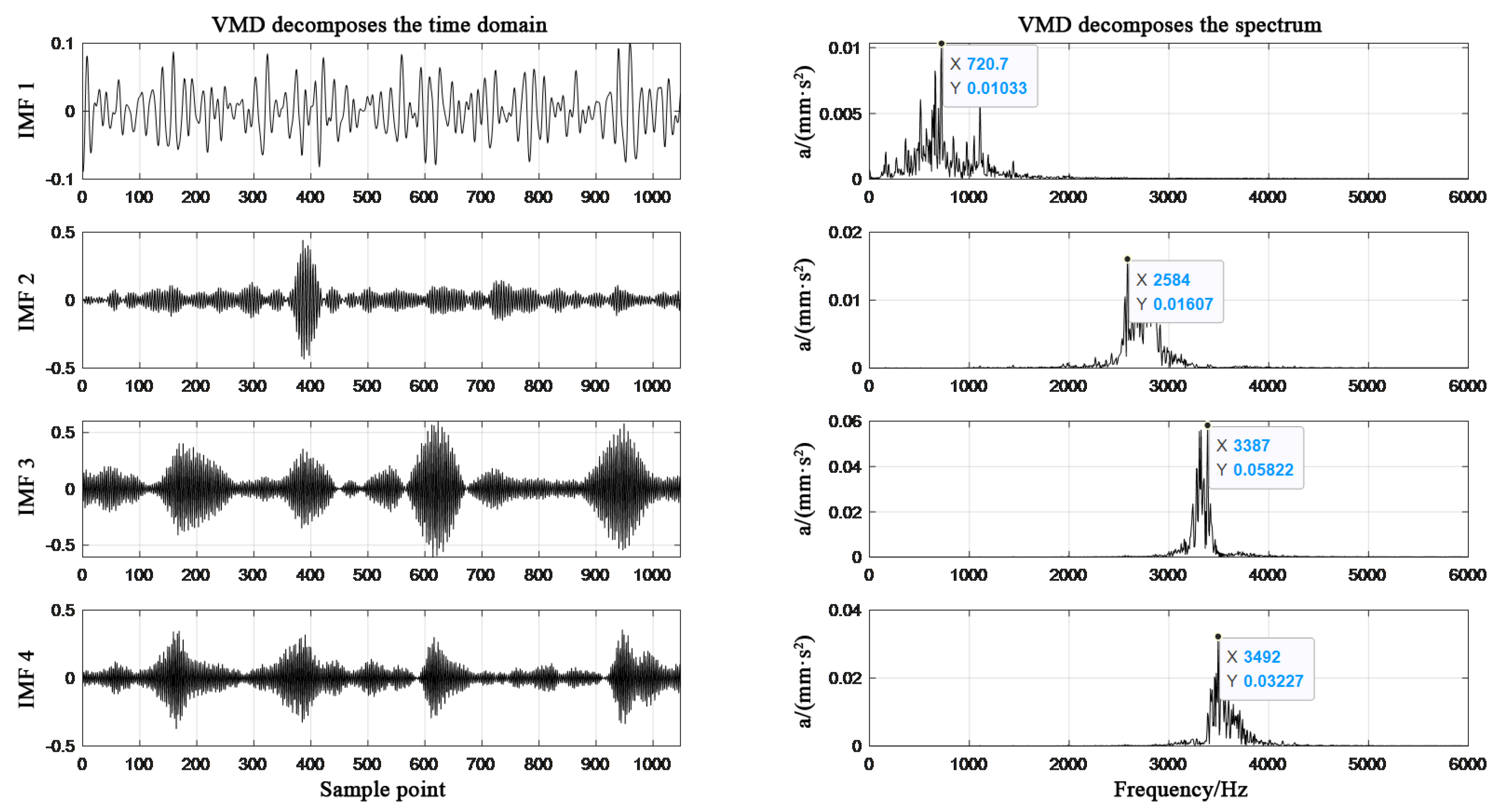
- The SSA algorithm is used to optimize the decomposition layer k and penalty factor α in VMD, and the vibration signal is decomposed into multiple intrinsic mode functions (IMFs) to calculate multi-domain features.
- (2)
- Multivariate characteristics of bearing faults are extracted by KPCA, achieve dimensionality reduction of fault characteristics.
- (3)
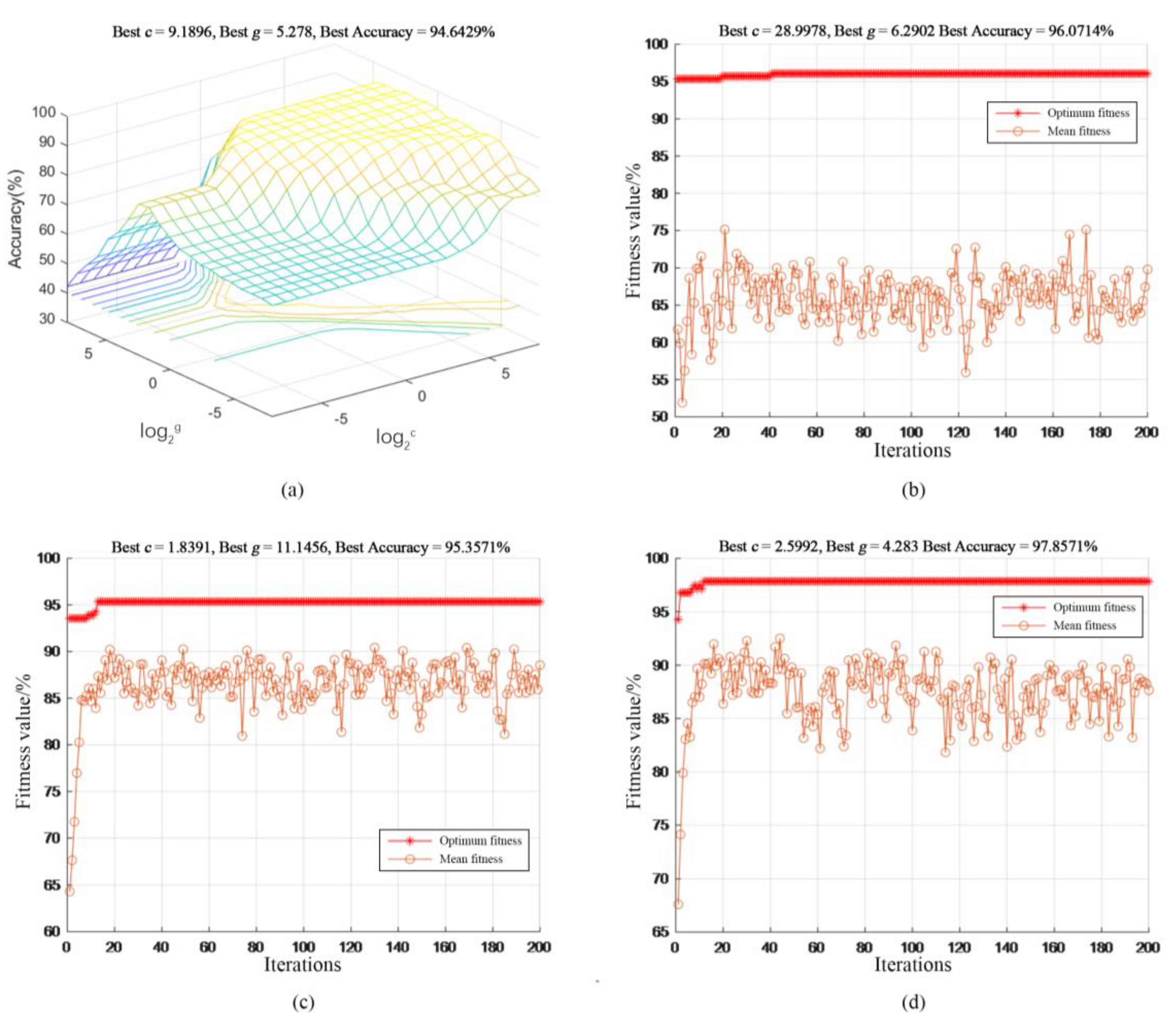
- SSA was used to optimize the kernel parameter g and penalty factor c of SVM.
- (4)
- The extracted fault features are set with type labels in the classifier, and the fault samples are classified by voting method. The diagnosis process is divided into training stage and test stage, and the ratio of training set and test set is 7:3, which is input into the optimized SVM for training.
- (5)
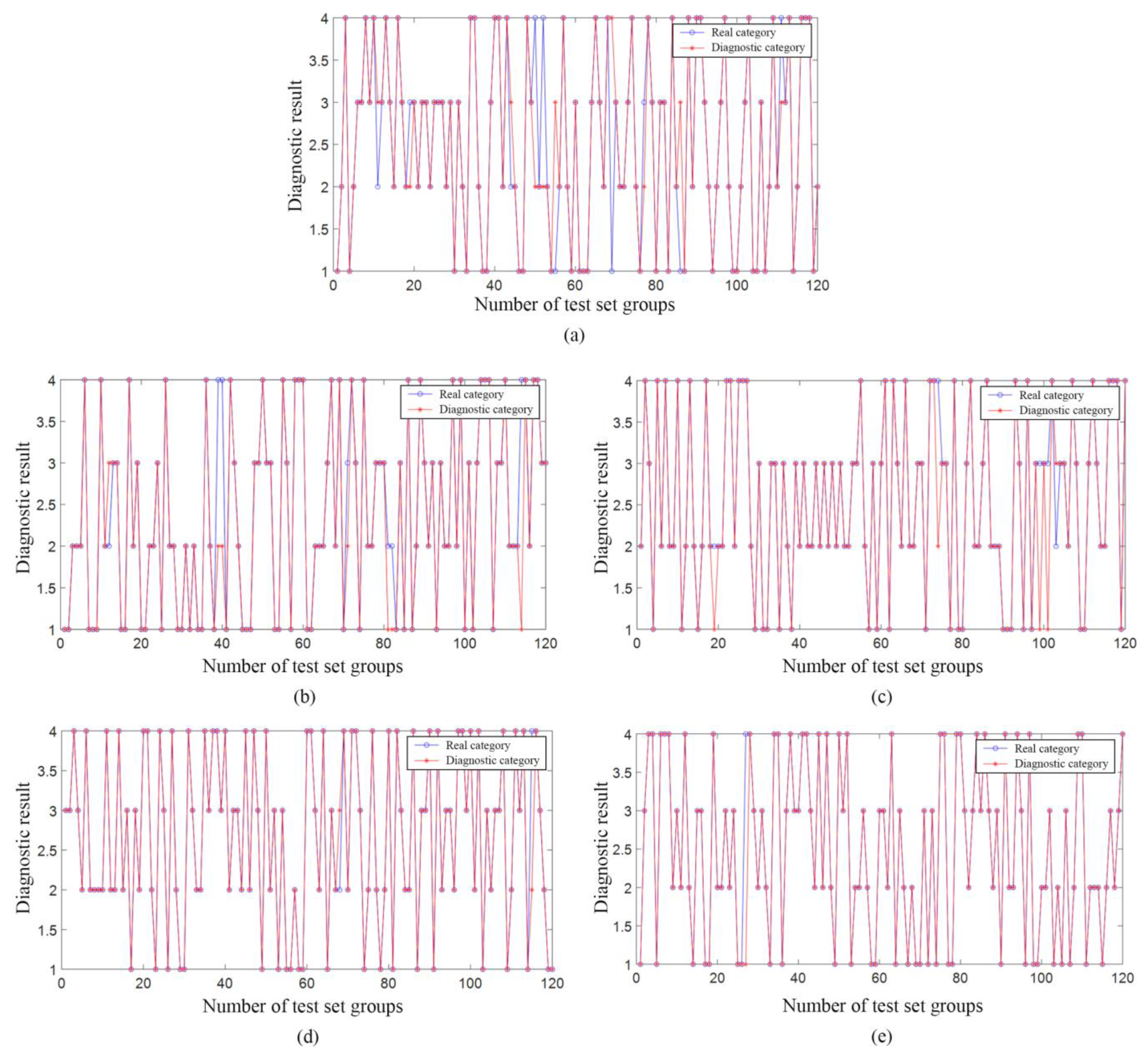
- The trained SVM was used to classify and judge different bearing fault samples.
3.2. Rolling Bearing Health Status Evaluation Model
- (1)
- Calculate the RMS Xrms of the bearing vibration signal data during the whole life cycle, and perform five-point smoothing processing to eliminate the judgment of the change point of the influence state caused by the burr effect caused by noise, and draw the RMS change curve of the whole life cycle.
- (2)
- Calculate the cosine distance CD and similarity between feature vectors, construct the health status evaluation index, draw smooth RMS change curve and health status change curve of the whole life cycle, and finally calculate the fault alarm threshold to achieve accurate division of the health status of bearing samples.
- (3)
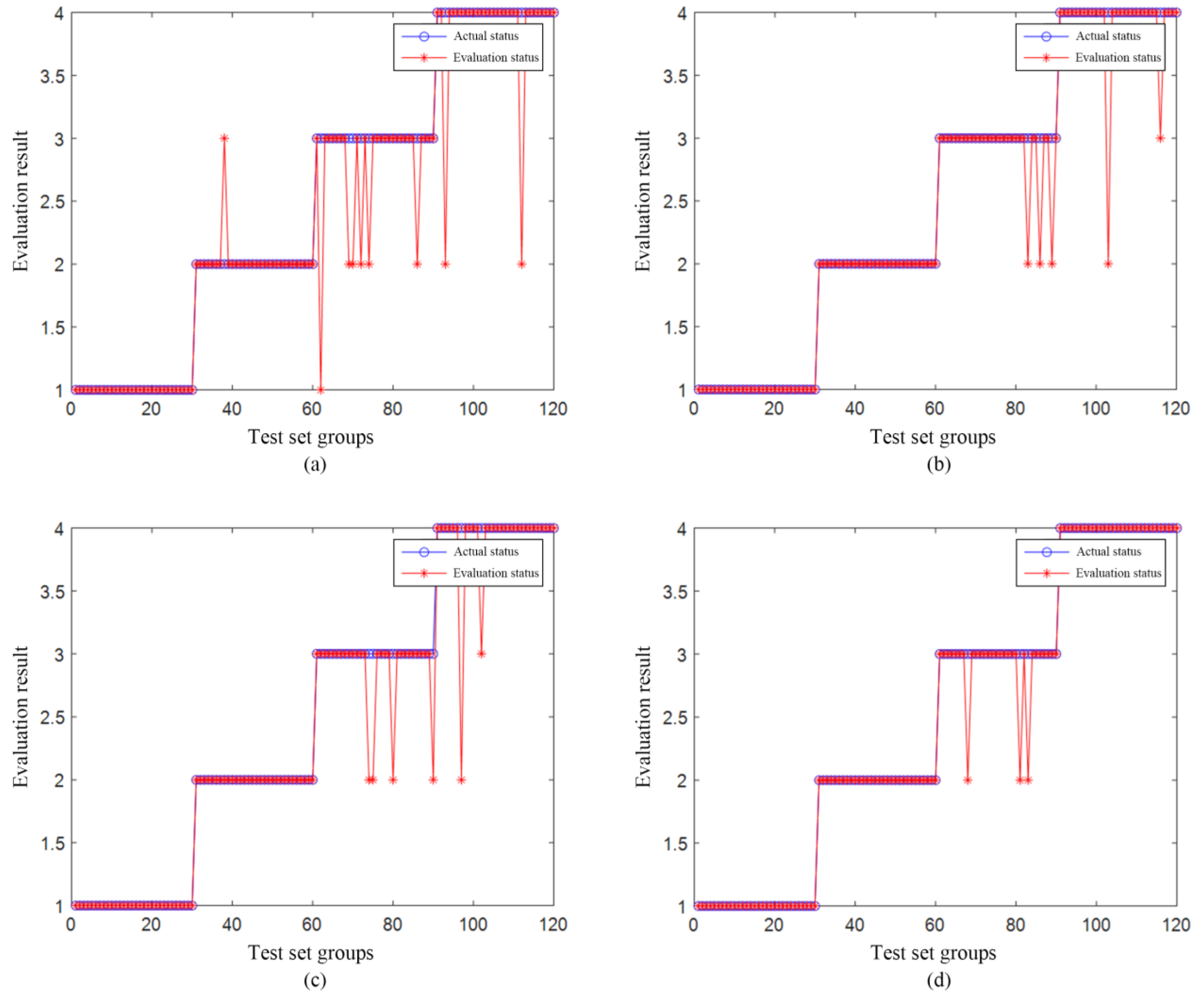
- SVM model was constructed using the construction method mentioned above, and four classification labels including normal state, early fault state, moderate fault state and severe fault state were set. The rest process was the same as that of rolling bearing fault diagnosis model construction steps (4).
- (4)
- Input the training set data into the SVM, and the fitness function is the same as that in the fault diagnosis model. The SSA algorithm is used to obtain the optimal value of the kernel function parameter g and penalty factor c in the SVM to form the SVM optimized by SSA.
- (5)
- Input the test set samples into the trained SSA-SVM to realize the evaluation of different health states of rolling bearings.
4. Experimental Verification
4.1. Decomposition Processing of Vibration Signal
4.2. Feature Extraction and Dimension Reduction Based on KPCA
4.3. Identifying Fault Types
4.4. Test and Verification of Health Status Assessment Model
4.4.1. Assessment and Division of Health Status
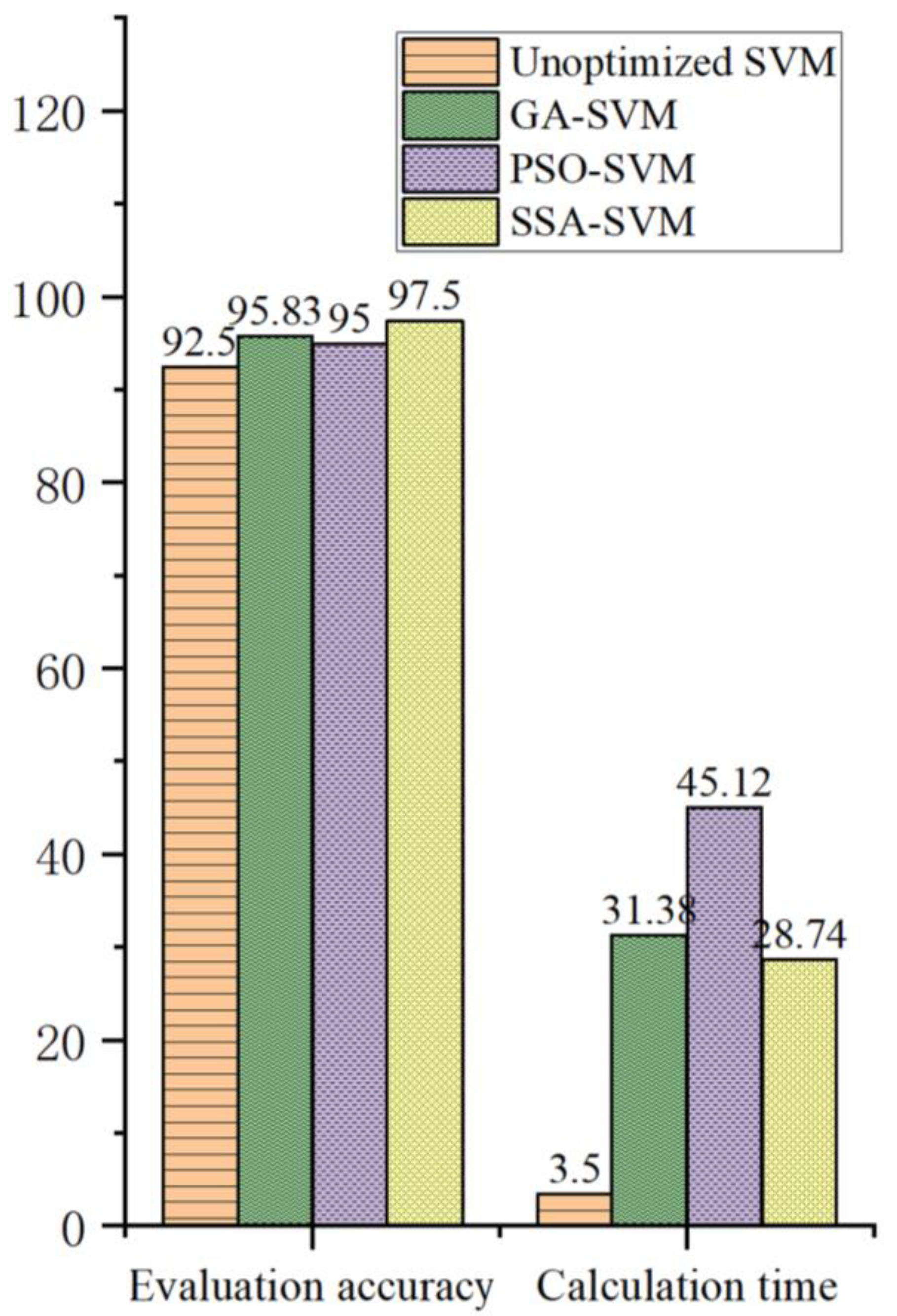
4.4.2. Comparison of Health Status Evaluation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ding, X.; He, Q.; Luo, N. A fusion feature and its improvement based on locality preserving projections for rolling element bearing fault classification. J. Sound Vib. 2015, 335, 367–383. [Google Scholar] [CrossRef]
- Jiang, L.; Sheng, H.; Yang, T.; Tang, H.; Li, X.; Gao, L. A New Strategy for Bearing Health Assessment with a Dynamic Interval Prediction Model. Sensors 2023, 23, 7696. [Google Scholar] [CrossRef]
- Liu, M.; Fan, H.; Zhang, Y.; Li, Z.; Yang, W. Adaptive multi-scale method for the non-linear dynamic feature extraction of mechanical vibration signals. J. Vib. Shock 2020, 39, 224–232. [Google Scholar] [CrossRef]
- Qian, M.; Yu, Y.; Guo, L.; Gao, H.; Zhang, R.; Li, S. A new health indicator for rolling bearings based on impulsiveness and periodicity of signals. Meas. Sci. Technol. 2022, 33, 105008. [Google Scholar] [CrossRef]
- Jinwoo, S.; Seokgoo, K.; Woo, L.S.; Jinhong, M.; Joo-Ho, C. Construction of bearing health indicator under time-varying operating conditions based on Isolation Forest. Eng. Appl. Artif. Intell. 2023, 126, 107058. [Google Scholar] [CrossRef]
- Wang, X.; Zheng, J.; Ni, Q.; Pan, H.; Zhang, J. Traversal index enhanced-gram (TIEgram): A novel optimal demodulation frequency band selection method for rolling bearing fault diagnosis under non-stationary operating conditions. Mech. Syst. Signal Process. 2022, 172, 109017. [Google Scholar] [CrossRef]
- Liu, Y.; Kang, J.; Bai, Y.; Guo, C. Research on the health status evaluation method of rolling bearing based on EMD-GA-BP. Qual. Reliab. Eng. Int. 2023, 39, 2069–2080. [Google Scholar] [CrossRef]
- Aggarwal, A.; Malik, H.; Sharma, R. Feature Extraction using EMD and Classification through Probabilistic Neural Network for Fault Diagnosis of Transmission line. In Proceedings of the IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems, Delhi, India, 4–6 July 2016. [Google Scholar]
- Qi, X.; Ye, X.; Cai, J.; Zheng, J.; Pan, Z.; Zhang, X. Fault feature extraction method of rolling bearings based on VMD and manifold learning. J. Vib. Shock 2018, 37, 133–140. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Lu, Z.; Wang, Z.; Yan, X.; Liu, D.; Sun, J.; Ma, C. Research Progress in Application of Variational Mode Deomposition Method in Bearing Fault Diagnosis. Lubr. Eng. 2023. in press. Available online: http://kns.cnki.net/kcms/detail/44.1260.TH.20231207.1359.044.html (accessed on 8 December 2023).
- Wu, Z.; Li, H.; Wang, T. Research on Fault Diagnosis of Rolling Bearing Based on Trend-guided VMD. Mach. Des. Manuf. 2023; in press. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, B.; Xiao, L.; Ma, L.; Chen, Y. AMO-VMD data processing method for high-speed bearing fault under variable working conditions. Control Theory Appl. 2023, 40, 1–8. [Google Scholar]
- Wu, Z.; Zhang, Z.; Zheng, L.; Yan, T.; Tang, C. The Denoising Method for Transformer Partial Discharge Based on the Whale VMD Algorithm Combined with Adaptive Filtering and Wavelet Thresholding. Sensors 2023, 23, 8085. [Google Scholar] [CrossRef] [PubMed]
- Jiang, T.; Li, Y.; Li, S. Multi-fault diagnosis of rolling bearing using two-dimensional feature vector of WP-VMD and PSO-KELM algorithm. Soft Comput. 2022, 27, 8175–8187. [Google Scholar] [CrossRef]
- Peng, Z.; Bai, H.; Shiina, T.; Deng, J.; Liu, B.; Zhang, X. LED-Lidar Echo Denoising Based on Adaptive PSO-VMD. Information 2022, 13, 558. [Google Scholar] [CrossRef]
- Ni, Q.; Ji, J.; Feng, K.; Halkon, B. A fault information-guided variational mode decomposition (FIVMD) method for rolling element bearings diagnosis. Mech. Syst. Signal Process. 2022, 164, 108216. [Google Scholar] [CrossRef]
- Pawel, Z. Influence of bearing raceway surface topography on the level of generated vibration as an example of operational heredity. Indian J. Eng. Mater. Sci. 2020, 27, 356–364. [Google Scholar]
- Vivek, P.; Huzur, S.; Suraj, P.H. An autonomous method for diagnosing raceway defects and misalignment in a self-aligning rolling-element bearing. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2022, 236, 470–487. [Google Scholar] [CrossRef]
- Huang, J.; Cui, L.; Zhang, J. Novel morphological scale difference filter with application in localization diagnosis of outer raceway defect in rolling bearings. Mech. Mach. Theory 2023, 184, 105288. [Google Scholar] [CrossRef]
- Chen, R.; Liu, J.; Tang, J.; Han, Q.; Zhang, Y.; Cui, Y. Vibration characteristics analysis of rolling bearing rotor system considering radial clearance and outer raceway defect. Adv. Mech. Eng. 2023, 15, 4. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, W.; Xiong, Q.; Luo, D.; Mei, G.; Zhang, T. A rolling bearing fault diagnosis strategy based on improved multiscale permutation entropy and least squares SVM. J. Mech. Sci. Technol. 2017, 31, 2711–2722. [Google Scholar] [CrossRef]
- Zhou, J.; Xiao, M.; Niu, Y.; Ji, G. Rolling Bearing Fault Diagnosis Based on WGWOA-VMD-SVM. Sensors 2022, 22, 6281. [Google Scholar] [CrossRef] [PubMed]
- Song, X.; Wei, W.; Zhou, J.; Ji, G.; Hussain, G.; Xiao, M.; Geng, G. Bayesian-Optimized Hybrid Kernel SVM for Rolling Bearing Fault Diagnosis. Sensors 2023, 23, 5137. [Google Scholar] [CrossRef] [PubMed]
- Saeed-Nezamivand, C.; Ahmad, B.; Farid, N. A new intelligent fault diagnosis method for bearing in different speeds based on the FDAF-score algorithm, binary particle swarm optimi- zation, and support vector machine. Soft Comput. 2019, 23, 1–19. [Google Scholar] [CrossRef]
- Javed, K.; Gouriveau, R.; Zerhouni, N.; Nectoux, P. Enabling Health Monitoring Approach Based on Vibration Data for Accurate Prognostics. IEEE Trans. Ind. Electron. 2015, 62, 647–656. [Google Scholar] [CrossRef]
- Li, Z.; Fang, H.; Huang, M.; Wei, Y.; Zhang, L. Data-driven bearing fault identification using improved hidden Markov model and self-organizing map. Comput. Ind. Eng. 2018, 116, 37–46. [Google Scholar] [CrossRef]
- Dong, X.; Cao, Y.; Li, H.; Han, X.; Feng, W. Performance Degradation Evaluation Model of Rolling Bearing Based on CAE-SVDD; Springer Nature: Cham, Switzerland, 2023; pp. 341–353. [Google Scholar] [CrossRef]
- Liao, A.; Wu, Y.; Ding, Y. Performance degradation evaluation of rail vehicle bearing based on PSO-OEWOA and MKSVDD. J. Railw. Sci. Eng. 2022, 19, 2730–2738. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Yang, S.; Tang, B.; Wang, W.; Yang, Q.; Hu, C. Physics-informed multi-state temporal frequency network for RUL prediction of rolling bearings. Reliab. Eng. Syst. Saf. 2024, 242, 109716. [Google Scholar] [CrossRef]
- Mohit, J.; Vijander, S.; Asha, R. A novel nature-inspired algorithm for optimization: Squirrel search algorithm. Swarm Evol. Comput. 2018, 44, 1–28. [Google Scholar] [CrossRef]
- Xin, X. Support Vector Machine Theory, Algorithm and Implementation. Master’s Thesis, Information Engineering University, Zhengzhou, China, 2005. [Google Scholar]
- The Case Western Reserve University. Bearing Data Center Seeded Fault Test Data. Available online: https://engineering.case.edu/bearingdatacenter (accessed on 27 December 2021).
- Jiang, L.L.; Li, P.; Tang, S.W. Parameter Optimization in KPCA for Rotating Machinery Feature Vector Dimensionality Reduction. Adv. Eng. Forum 2011, 1598, 755–760. [Google Scholar] [CrossRef]
- Chen, P.; Zhao, X.; Zhu, X. Fault diagnosis method of rolling bearing based on VMD-MPE-KPCA feature extraction mixed with MRVM. J. Lanzhou Univ. Technol. 2020, 46, 92–99. [Google Scholar]
- Bearin Data Set in NASA Ame Prognostic Data Repository. Available online: http://ti.arc.nasa.gov/project/prognostic-data-repository (accessed on 19 March 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type | Decomposition Layer k | Penalty Factor α |
|---|---|---|
| Normal state | 4 | 2489 |
| Inner ring fault | 4 | 1364 |
| Rolling element fault | 4 | 557 |
| Outer ring fault | 4 | 1439 |
| Algorithm Name | Calculation Time/s |
|---|---|
| PSO-VMD | 639 |
| GA-VMD | 658 |
| SSA-VMD | 582 |
| Feature | Calculation Expression | Feature | Calculation Expression | Feature | Calculation Expression |
|---|---|---|---|---|---|
| Variance | Maximum value | Minimum value | |||
| Mean value | Absolute mean | Skewness | |||
| Kurtosis | RMS value | Root amplitude | |||
| Peak to peak value | Peak factor | Pulse factor | |||
| Kurtosis factor | Waveform factor | Margin factor | |||
| Skewness factor | P1 | P2 | |||
| P3 | P4 | P5 | |||
| P6 | P7 | P8 | |||
| P9 | P10 | P11 | |||
| P12 | P13 | Energy entropy of each IMF |
| Fault Diagnosis Model | Penalty Factor c | Kernel Function Parameter g | Diagnostic Accuracy/% | Calculation Time/s |
|---|---|---|---|---|
| GA-SVM | 1.8391 | 11.1456 | 94.1667 | 42.879 |
| PSO-SVM | 28.9978 | 6.2902 | 95.8333 | 57.985 |
| Unoptimized SVM | 9.1896 | 5.278 | 91.6667 | 3.687 |
| SSA-SVM | 2.5992 | 4.283 | 98.3333 | 41.438 |
| SSA-SVM without KPCA | 1.6857 | 7.4074 | 99.1667 | 57.208 |
| Data Set Groups | Sample Length | Damaged Bearing | Damaged Location |
|---|---|---|---|
| Data set 1 | 2156 | Bearing 3 | Inner ring fault |
| Bearing 4 | Rolling element fault | ||
| Data set 2 | 984 | Bearing 1 | Outer ring fault |
| Data set 3 | 6324 | Bearing 3 | Outer ring fault |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Zhou, L.; Li, J.; Niu, H. Health Management of Bearings Using Adaptive Parametric VMD and Flying Squirrel Search Algorithms to Optimize SVM. Processes 2024, 12, 433. https://doi.org/10.3390/pr12030433
Zhang T, Zhou L, Li J, Niu H. Health Management of Bearings Using Adaptive Parametric VMD and Flying Squirrel Search Algorithms to Optimize SVM. Processes. 2024; 12(3):433. https://doi.org/10.3390/pr12030433
Chicago/Turabian StyleZhang, Tianrui, Lianhong Zhou, Jinyang Li, and Huiyuan Niu. 2024. "Health Management of Bearings Using Adaptive Parametric VMD and Flying Squirrel Search Algorithms to Optimize SVM" Processes 12, no. 3: 433. https://doi.org/10.3390/pr12030433
APA StyleZhang, T., Zhou, L., Li, J., & Niu, H. (2024). Health Management of Bearings Using Adaptive Parametric VMD and Flying Squirrel Search Algorithms to Optimize SVM. Processes, 12(3), 433. https://doi.org/10.3390/pr12030433