
Static Characteristics and Energy Consumption of the Pressure-Compensated Pump
 , , and
, , and
Abstract
:1. Introduction
2. Theoretical Background
2.1. Pressure-Compensated Pump
2.2. Determination of the Pump Displacement
2.3. Determination of the Pump Efficiencies
2.4. Determination of the Pump Mechanical Power Input
3. Experimental Device and Methods
4. Results and Discussion
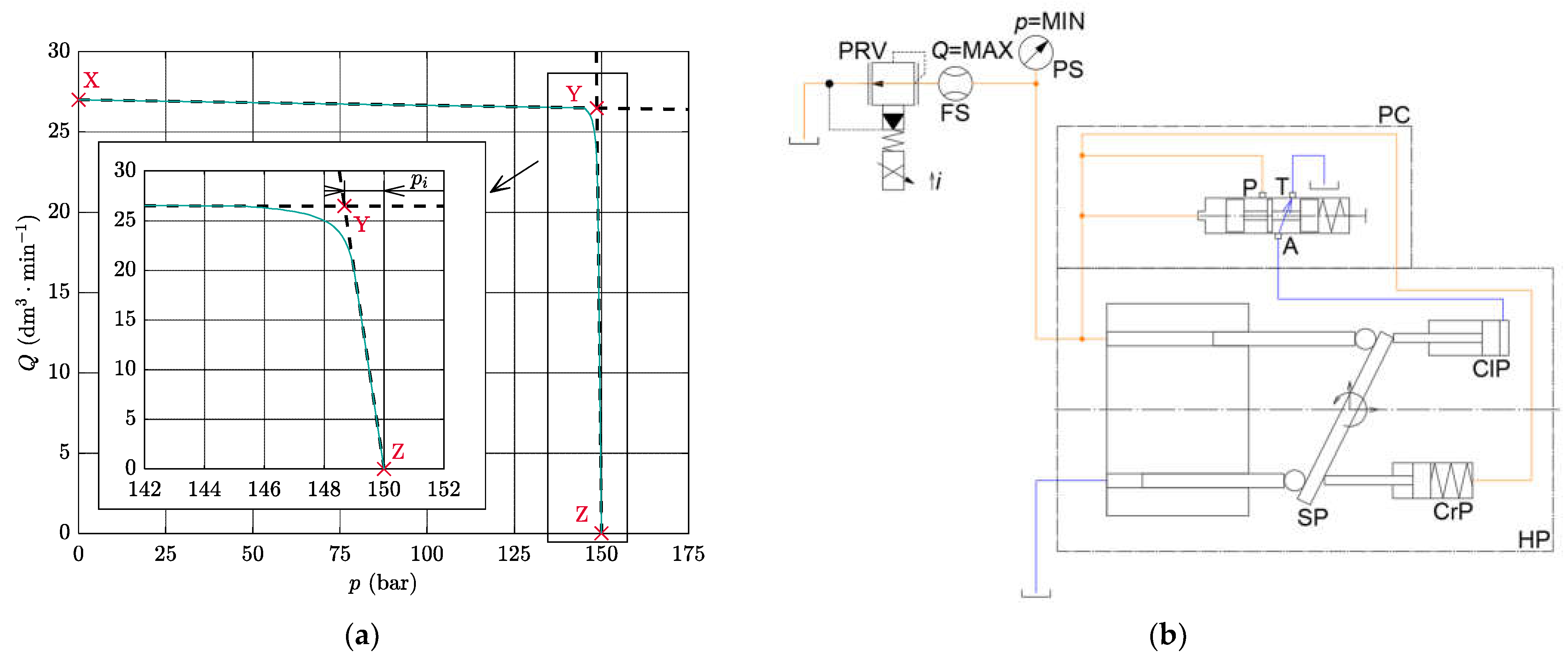
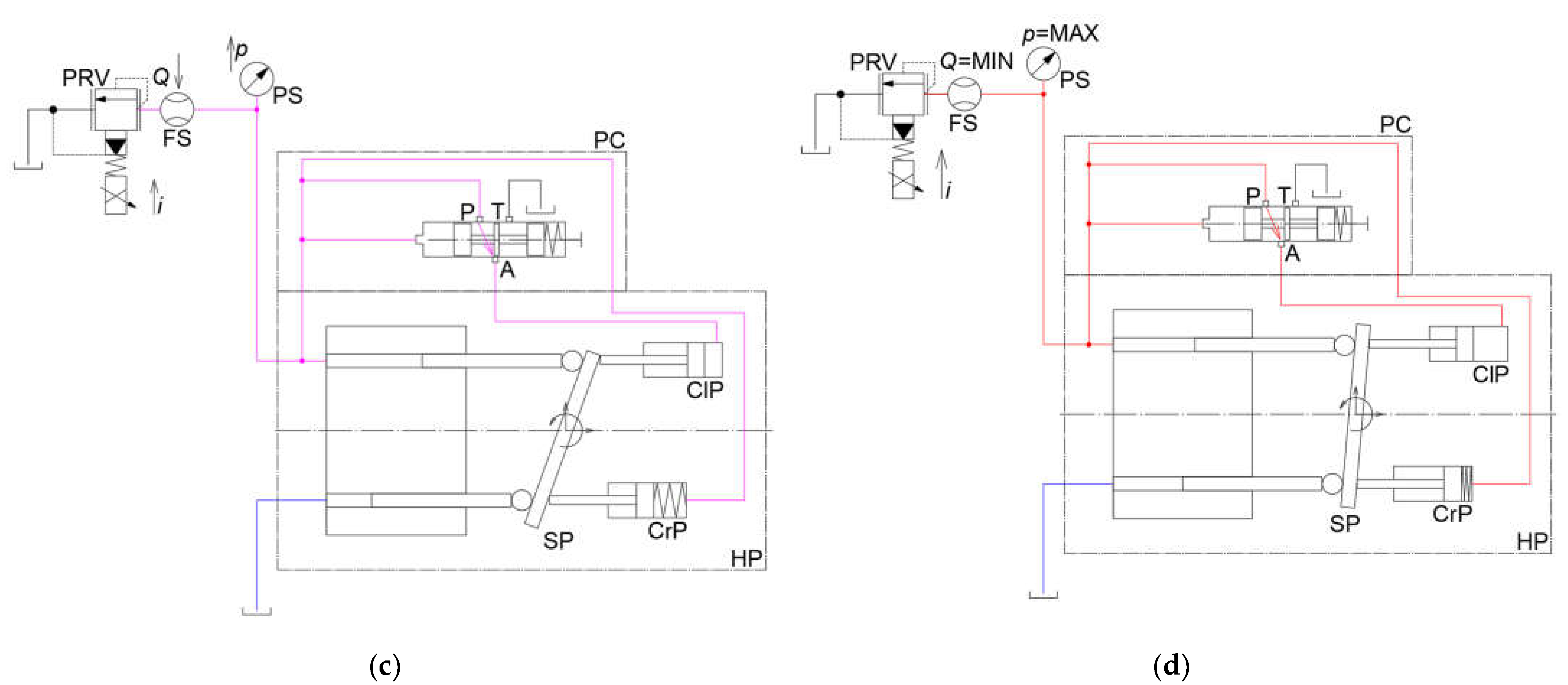
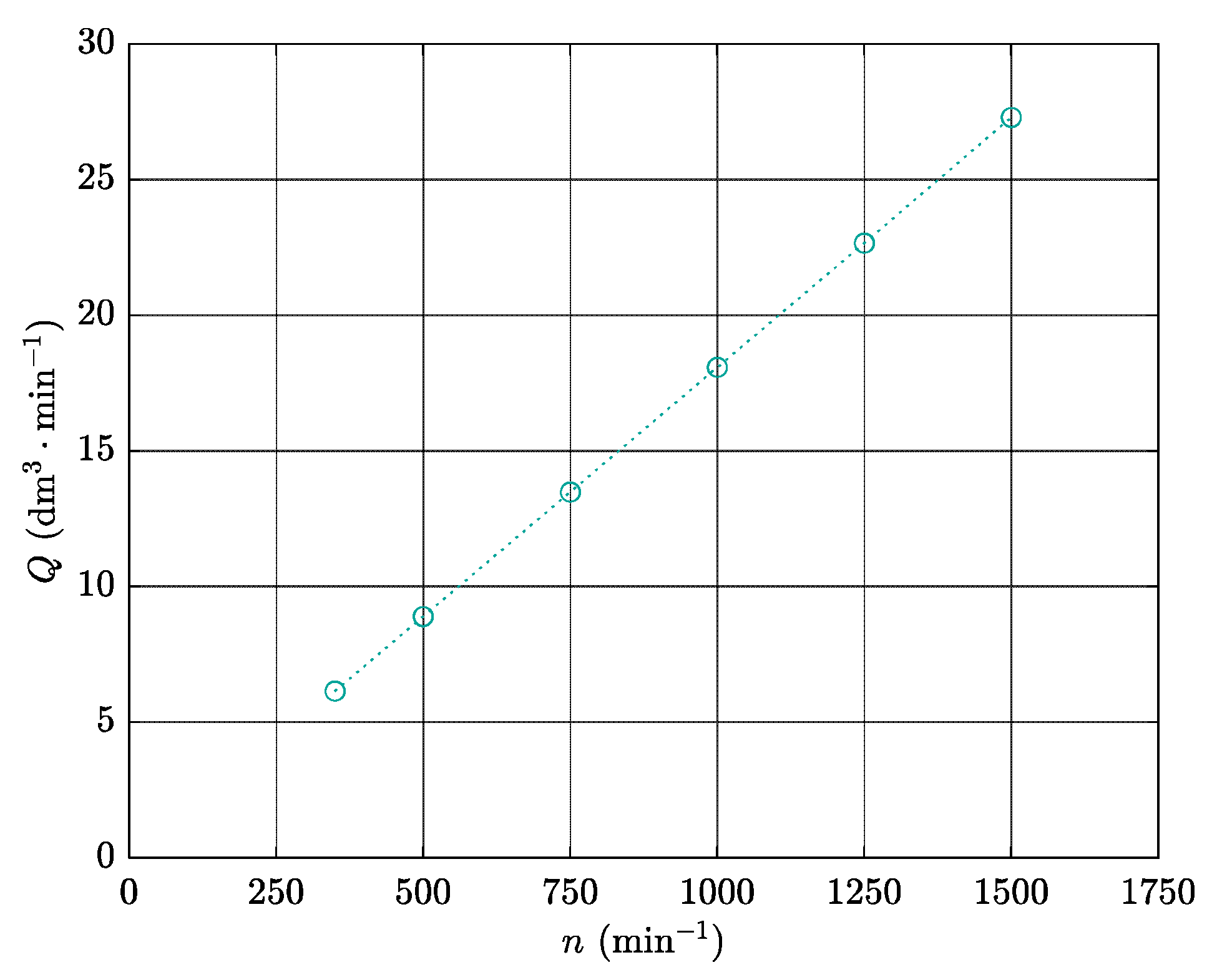
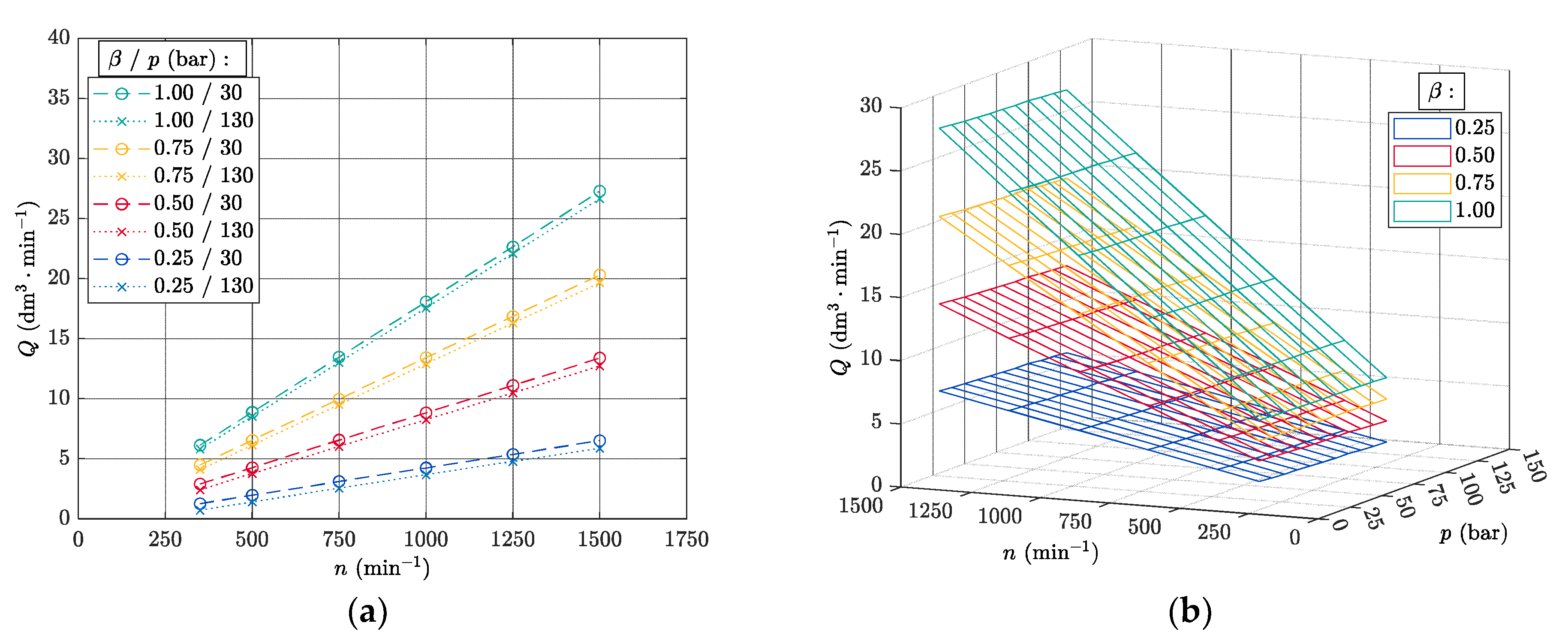
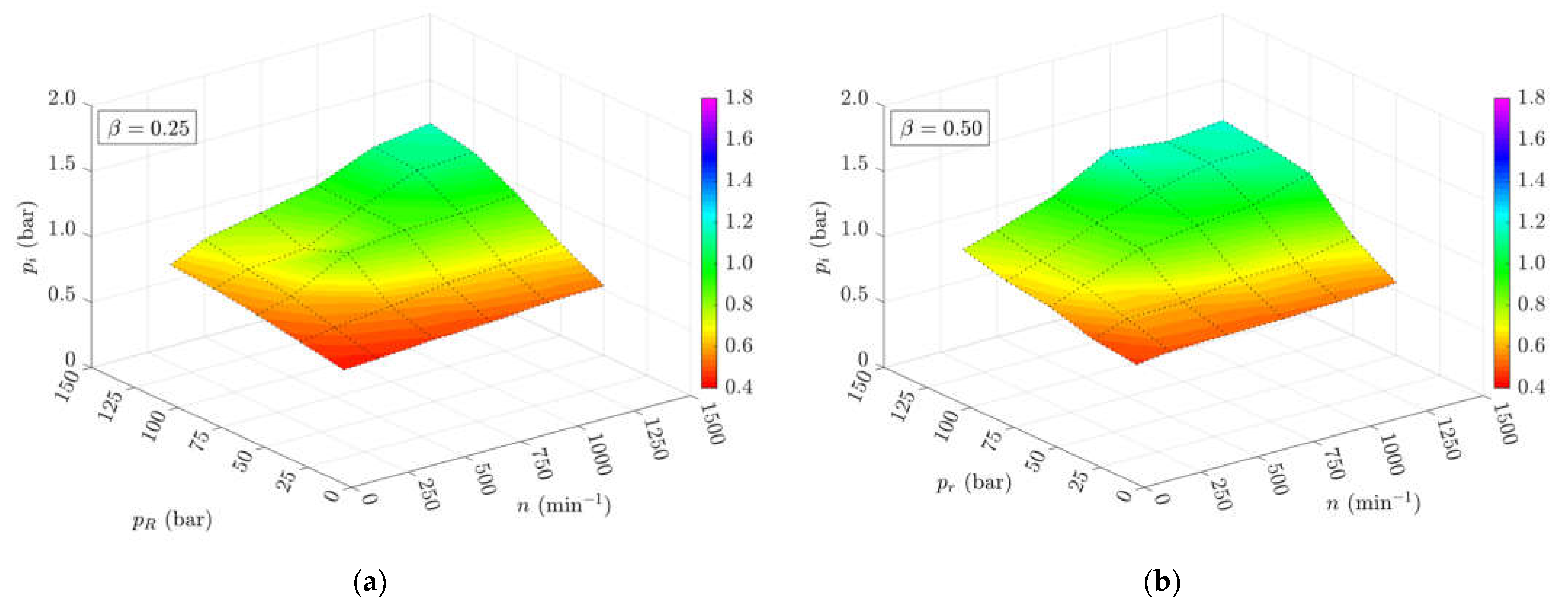
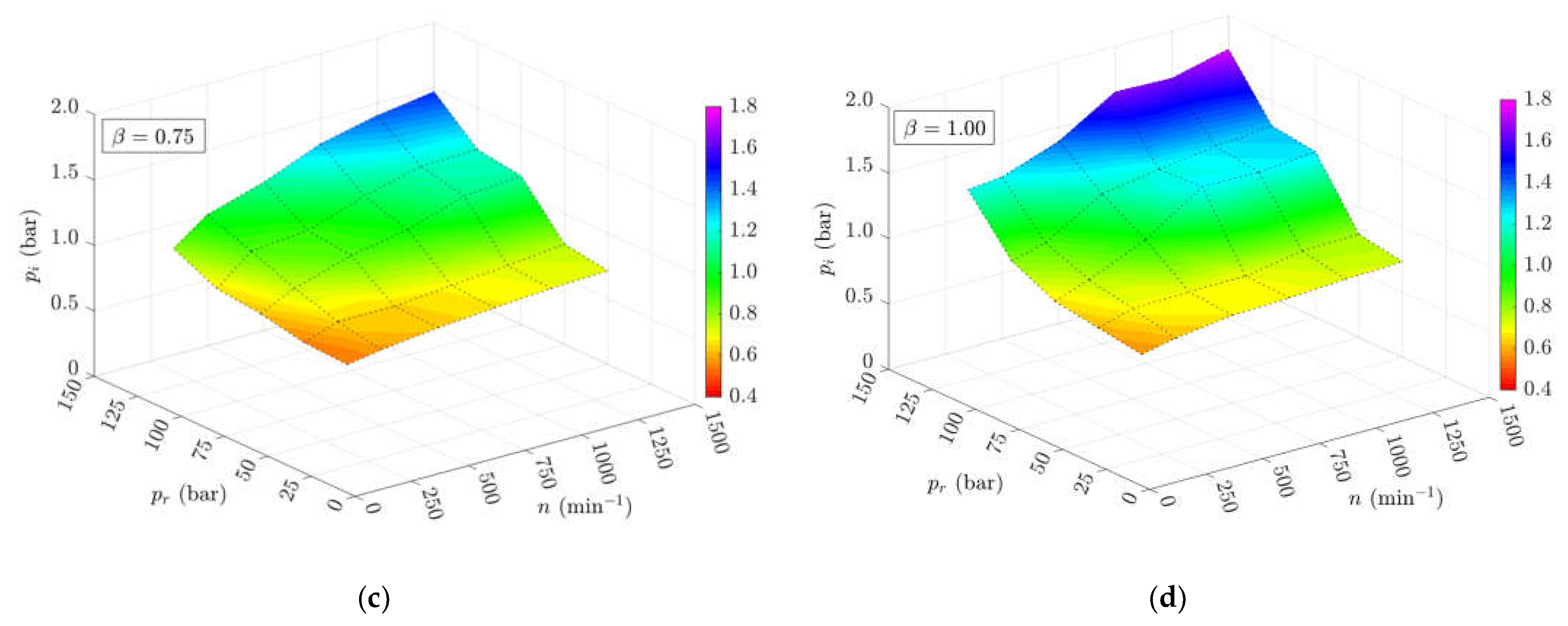
4.1. Flow Characteristics of the Pressure-Compensated Pump
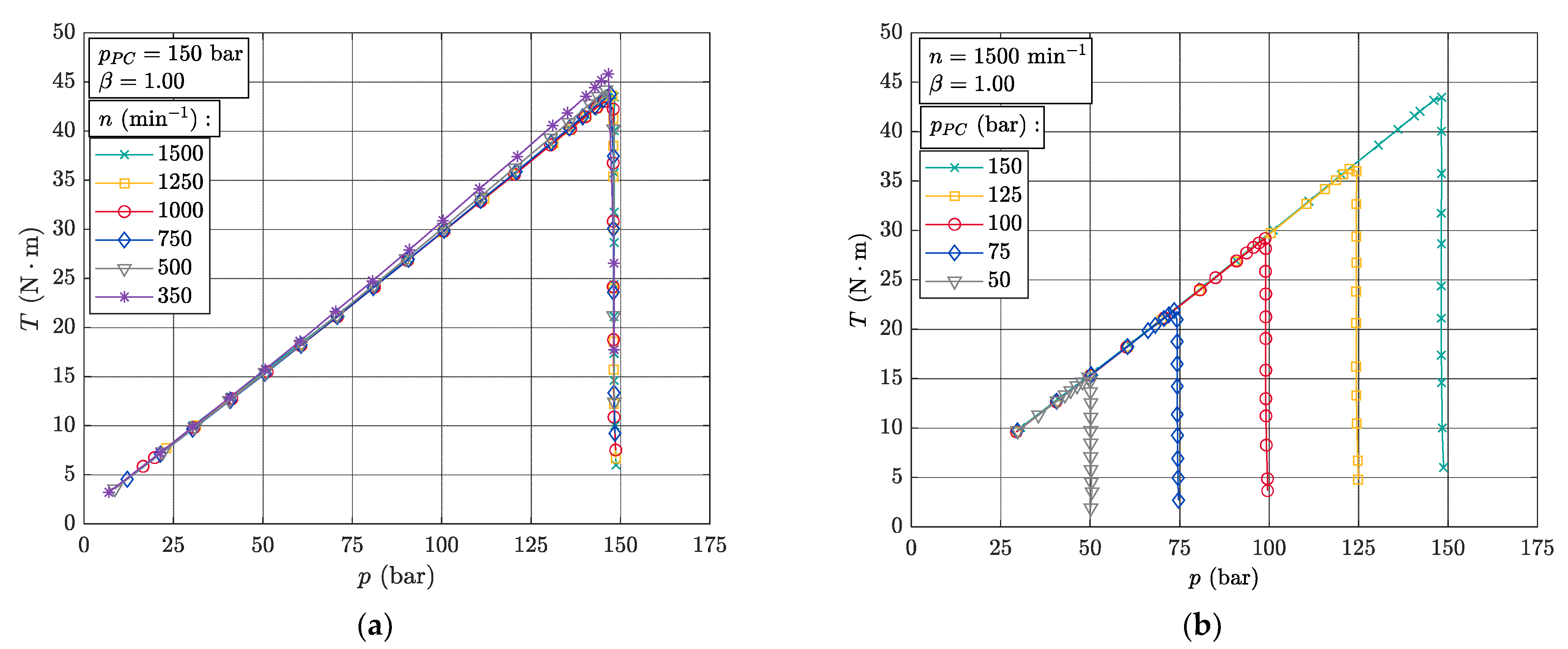
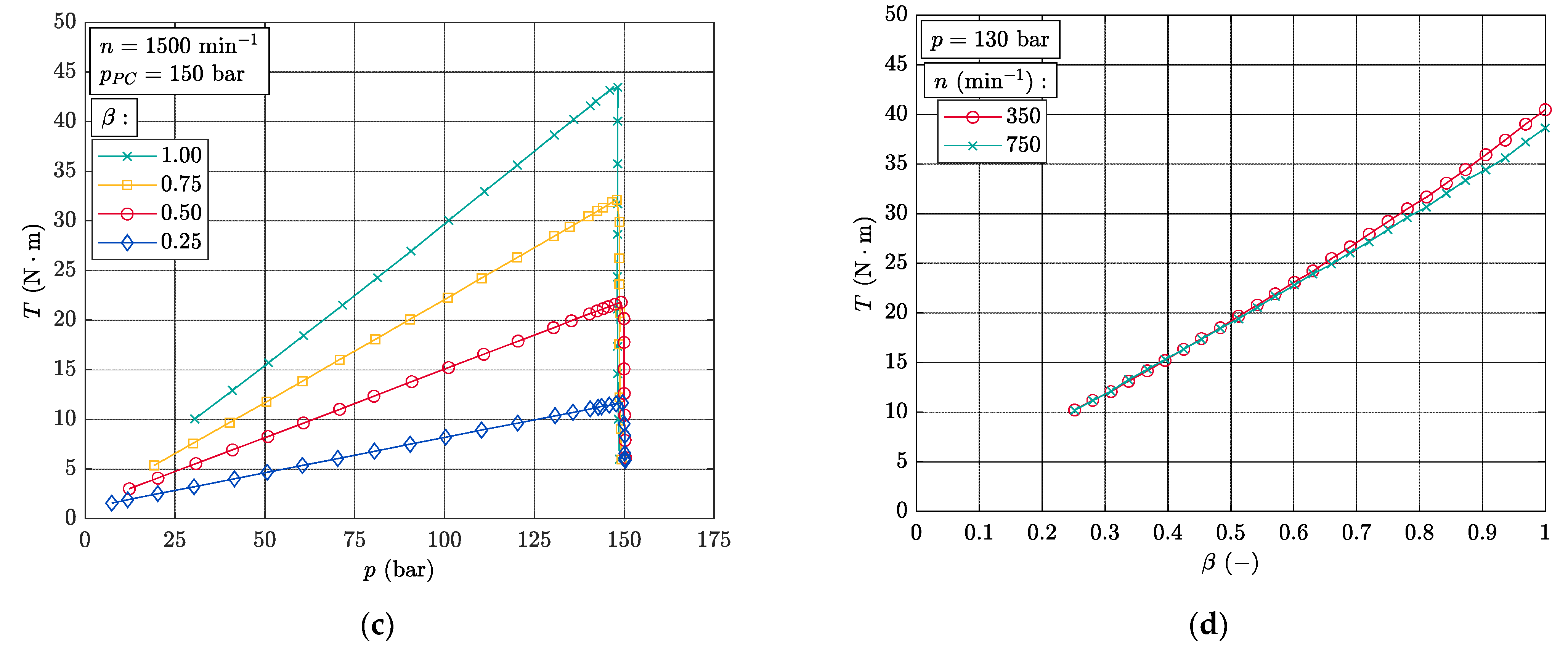
4.2. Torque Characteristic of the Pressure-Compensated Pump
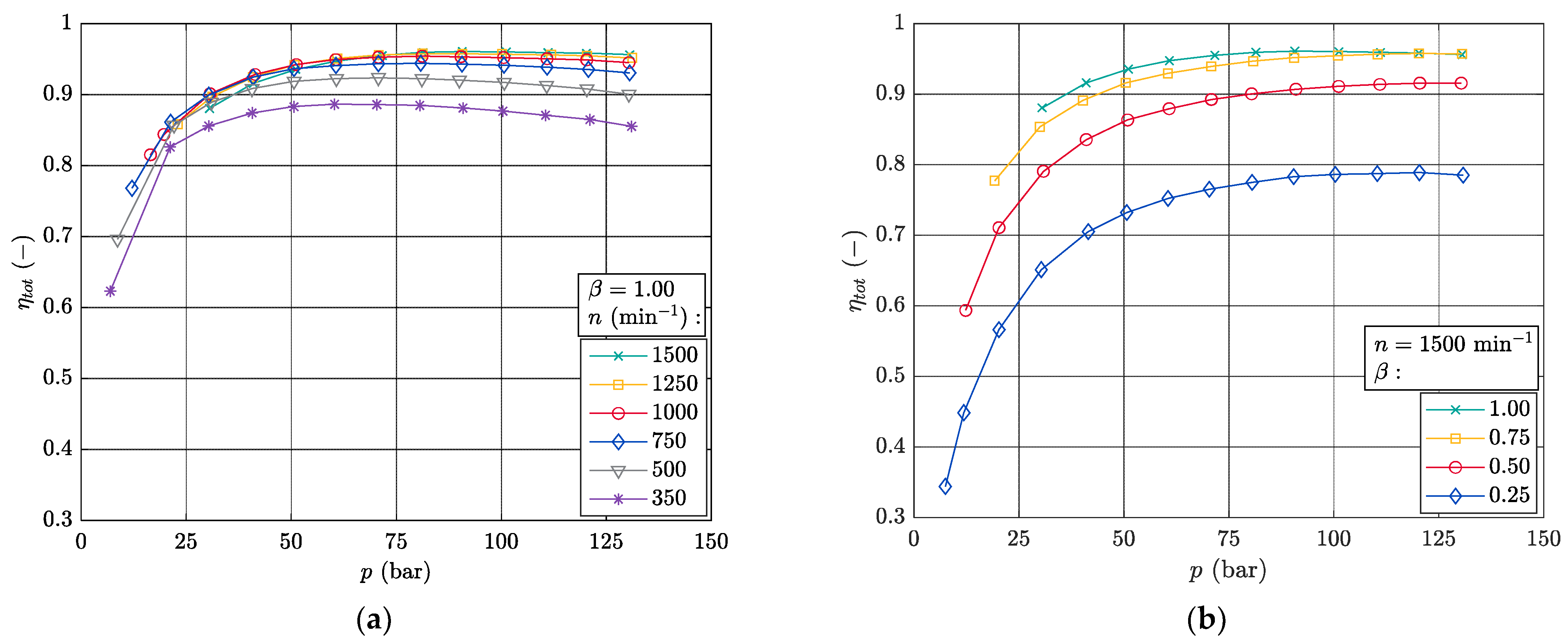
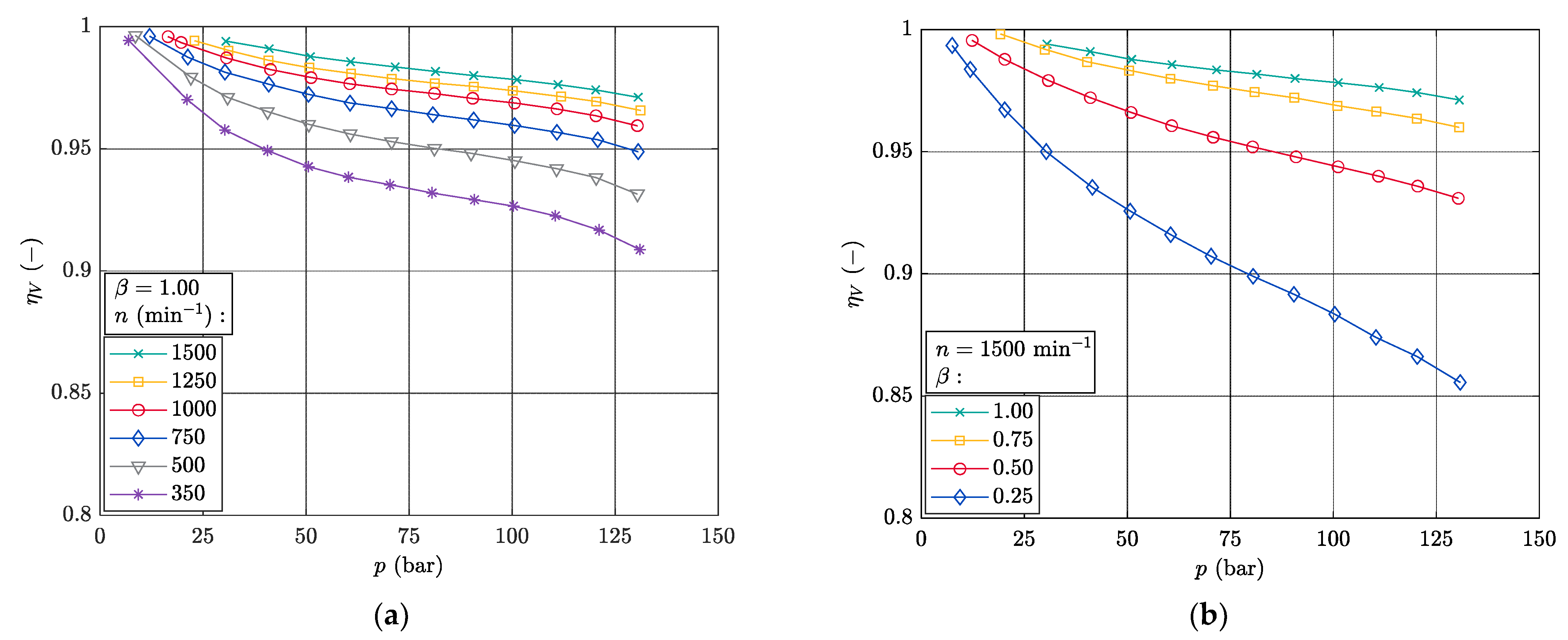
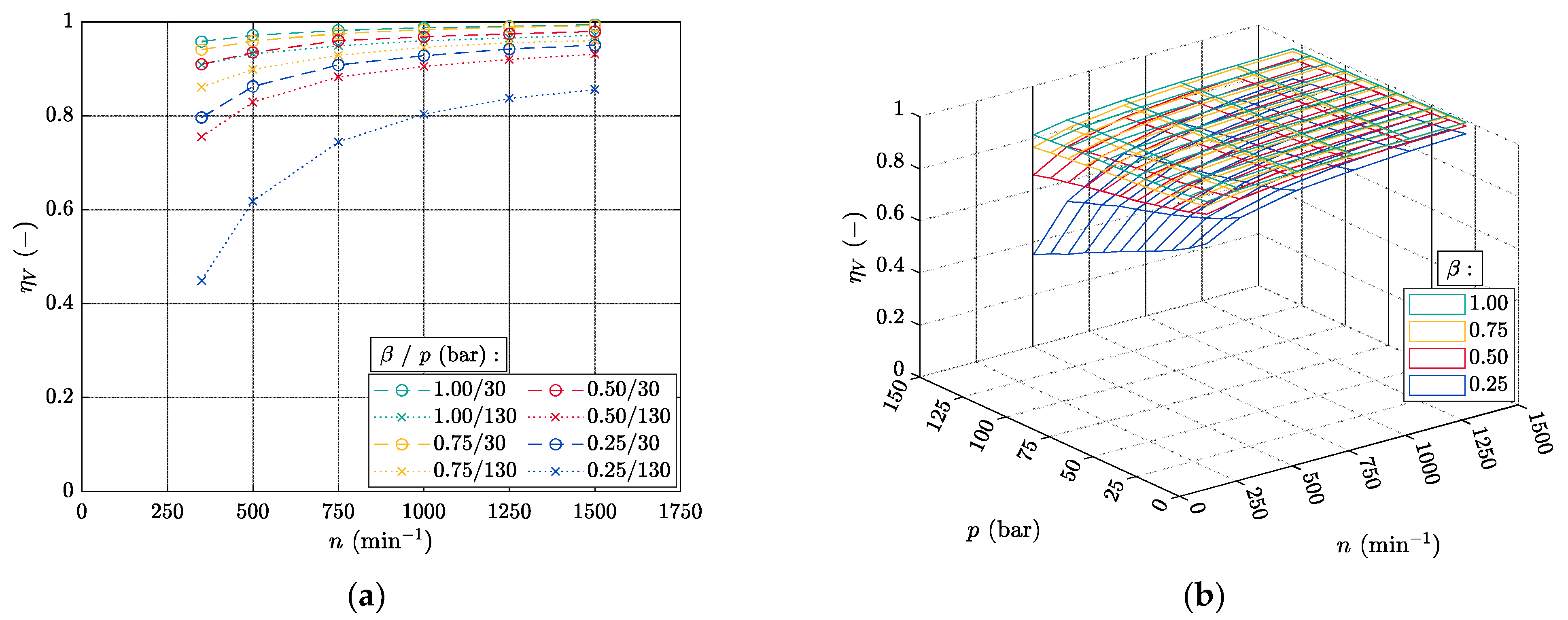
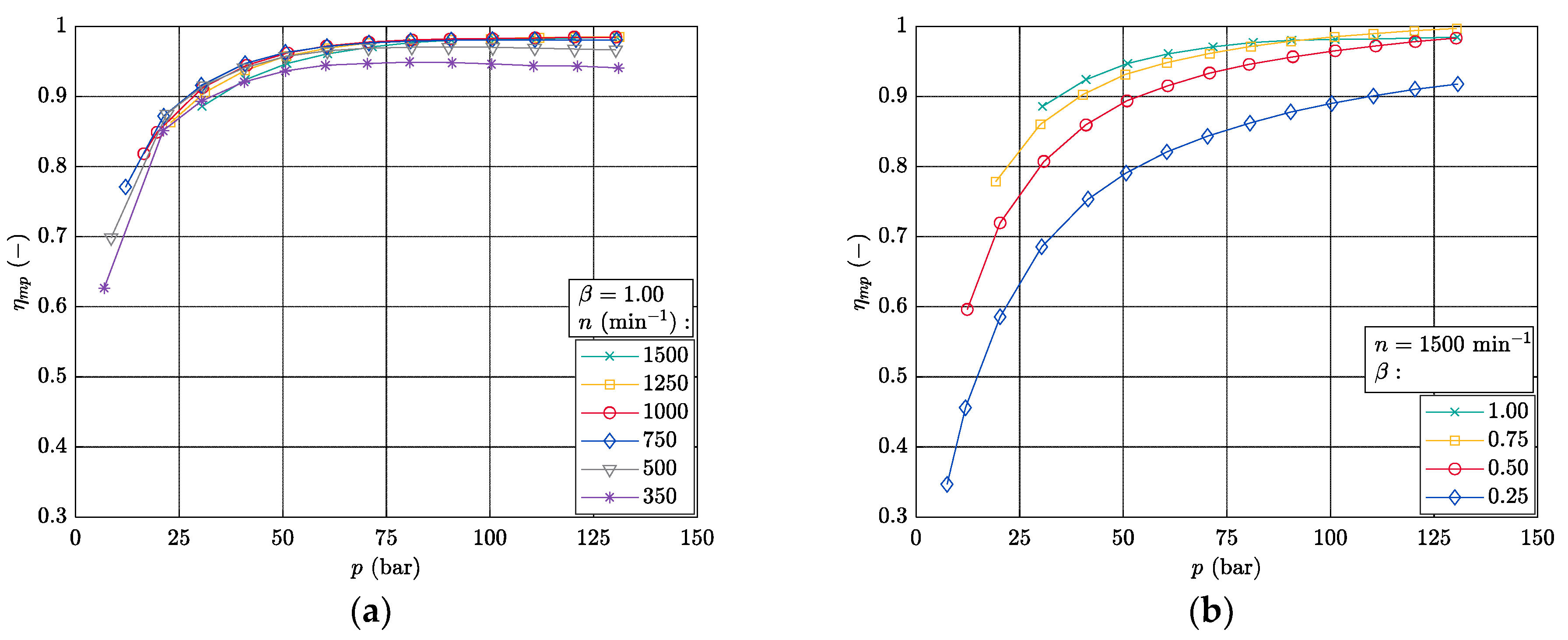
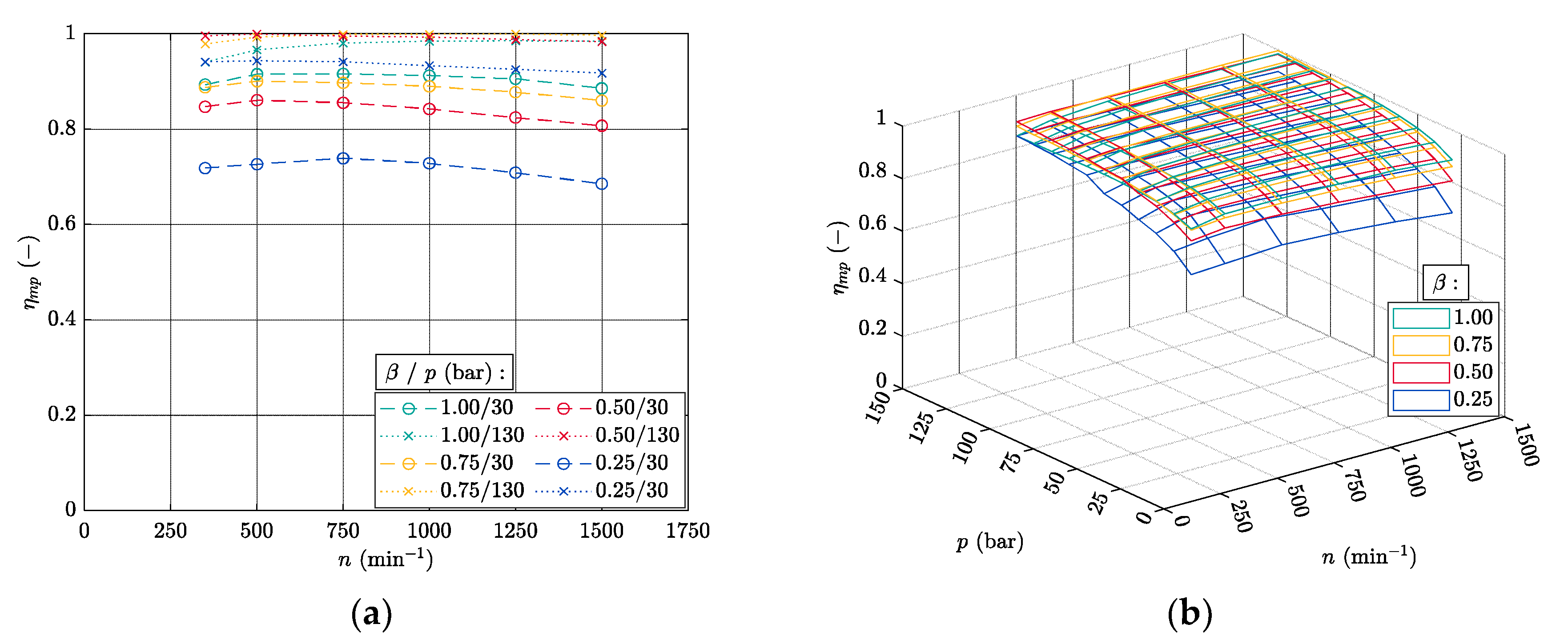
4.3. Efficiency of the Pressure-Compensated Pump
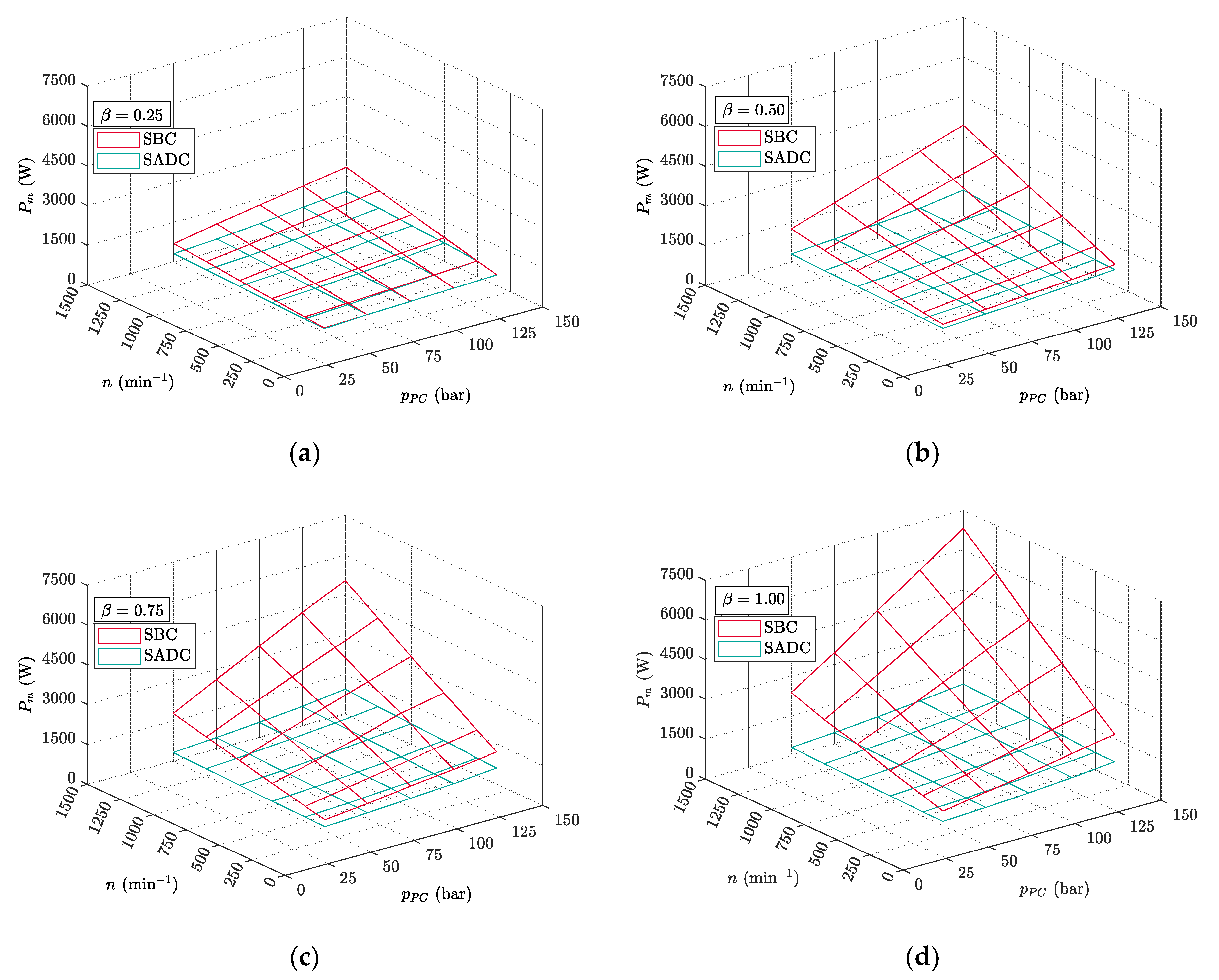
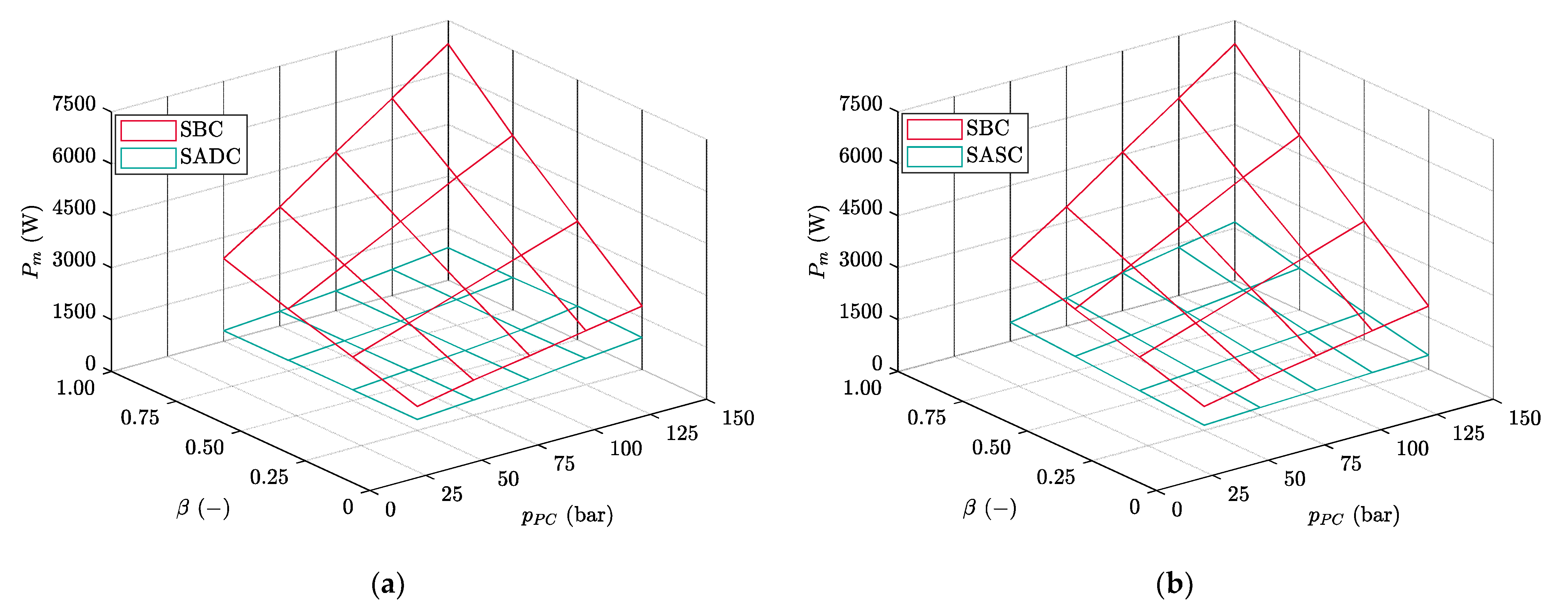
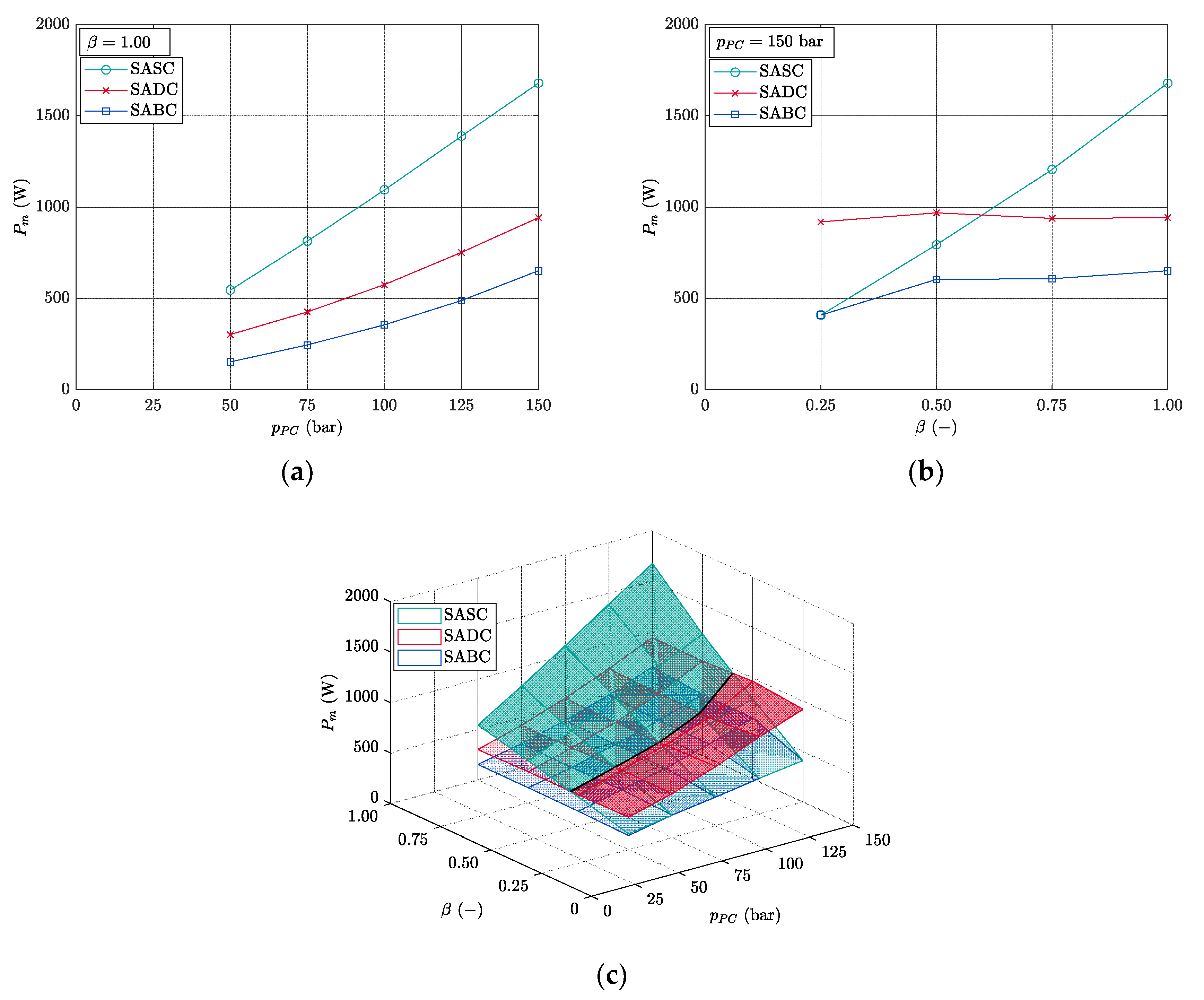
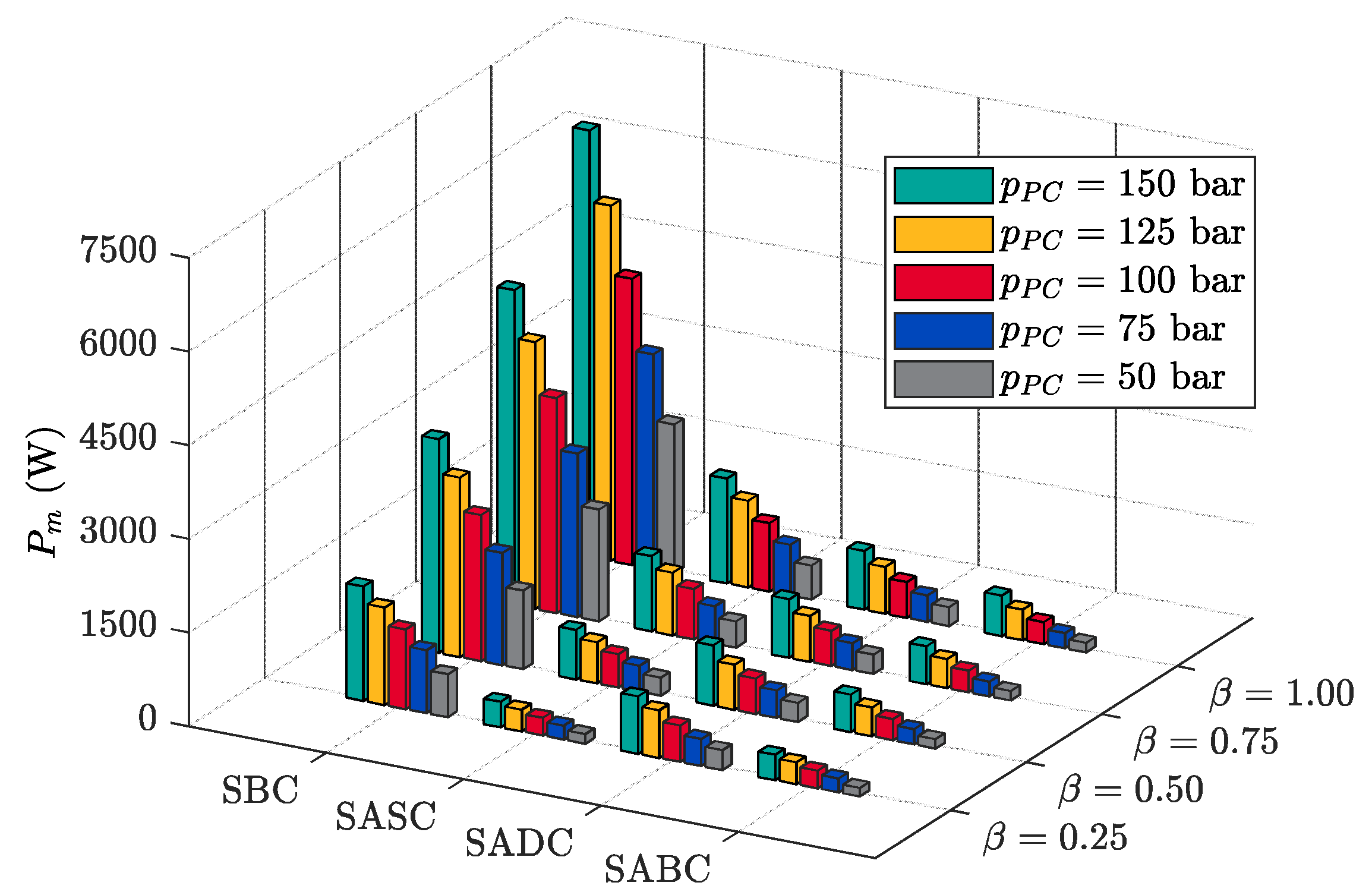
4.4. Comparison of the Stand-by Mechanical Input Power
5. Conclusions
- The individual static characteristics and dependencies of the monitored variables in a wide range of boundary conditions were measured and determined.
- It was found that with the maximum relative displacement and higher values of the pressure at the pump outlet pressure, there is a deviation from the linear trend of the torque according to the pump speed. A significant deviation occurs for the lower speeds (n < 500 min−1). This is due to the higher passive resistances when the swash plate is tilted at the greatest swash angle and the radial forces reach the highest values. From these findings, it can be concluded that for the speed n < 500 min−1, more stresses occur and this pump should not be operated below these critical pump speeds for a long time.
- Power savings were evaluated for the displacement control, the speed control and both control methods simultaneously. From the results obtained, it is clear that the displacement control has a more significant effect on the power saving of the pump in a wider range of boundary conditions. Speed control is generally preferable for the smaller relative displacements where the swash plate is tilted at a lower angle. Using both controls simultaneously brings the greatest total input power savings.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| n | pump speed |
| p | pump outlet pressure |
| p0 | pump inlet pressure |
| Ph | hydraulic power output of the pump |
| pi | pressure increase |
| Pm | mechanical power input of the pump |
| pPC | pressure set at the pressure compensator |
| Q | pump flow rate |
| Ql1 | flow rate losses between the barrel and the lens plate |
| Ql2 | flow rate losses between the swash plate and the slippers |
| Ql3 | flow rate losses between the barrel and the individual pistons |
| Ql4 | flow rate losses between the individual pistons and the slippers |
| QT | theoretical pump flow rate |
| t | temperature |
| T | torque |
| Vg | pump displacement |
| Vgset | actual set pump displacement |
| β | relative displacement |
| Δn | change in pump speed |
| Δp | pressure drop |
| ΔQ | change in flow rate |
| ηmp | mechanical pressure efficiency |
| ηtot | total efficiency |
| ηV | volumetric efficiency |
| ω | angular velocity |
| Subscripts | |
| max | maximum |
| min | minimum |
| n | term |
Abbreviations
| A | control piston channel |
| C | cooler |
| ClP | control piston |
| CrP | counter piston |
| F | filter |
| FC | frequency converter |
| FS | flow rate sensor |
| HP | pressure-compensated pump |
| M | electric motor |
| MS 5070 | multisystem MS 5070 |
| P | pump outlet channel |
| PC | pressure compensator |
| PRV | proportional relief valve |
| PS, PS 1, PS 2 | pressure sensor |
| RV | relief valve |
| SP | swashplate |
| SS | speed sensor |
| T | tank/tank channel |
| TeS | temperature sensor |
| TS | torque sensor |
| X, Y, Z | points of the flow characteristic |
References
- Kim, J.-H.; Jeon, C.-S.; Hong, Y.-S. Constant Pressure Control of a Swash Plate Type Axial Piston Pump by Varying Both Volumetric Displacement and Shaft Speed. Int. J. Precis. Eng. Manuf. 2015, 16, 2395–2401. [Google Scholar] [CrossRef]
- Yan, Z.; Ge, L.; Quan, L. Energy-Efficient Electro-Hydraulic Power Source Driven by Variable-Speed Motor. Energies 2022, 15, 4804. [Google Scholar] [CrossRef]
- Yang, X.; Gong, G.; Yang, H.; Jia, L.; Zhou, J. An Investigation in Performance of a Variable-Speed-Displacement Pump-Controlled Motor System. IEEE/ASME Trans. Mechatron. 2017, 22, 647–656. [Google Scholar] [CrossRef]
- Ge, L.; Quan, L.; Zhang, X.; Dong, Z.; Yang, J. Power Matching and Energy Efficiency Improvement of Hydraulic Excavator Driven with Speed and Displacement Variable Power Source. Chin. J. Mech. Eng. 2019, 32, 100. [Google Scholar] [CrossRef]
- Kauranne, H. Effect of Operating Parameters on Efficiency of Swash-Plate Type Axial Piston Pump. Energies 2022, 15, 4030. [Google Scholar] [CrossRef]
- Fornarelli, F.; Lippolis, A.; Oresta, P.; Posa, A. A computational model of axial piston swashplate pumps. In Proceedings of the 72nd Conference of the Italian Thermal Machines Engineering Association, Lecce, Italy, 6–8 September 2017. [Google Scholar]
- Xu, B.; Hu, M.; Zhang, J.; Su, Q. Characteristics of volumetric losses and efficiency of axial piston pump with respect to displacement conditions. J. Zhejiang Univ. Sci. A 2016, 3, 186–201. [Google Scholar] [CrossRef]
- Xu, B.; Hu, M.; Zhang, J.; Mao, Z. Distribution characteristics and impact on pump’s efficiency of hydro-mechanical losses of axial piston pump over wide operating ranges. J. Cent. S. Univ. 2017, 24, 609–624. [Google Scholar] [CrossRef]
- Hasko, D.; Shang, L.; Noppe, E.; Lefrançois, E. Virtual Assessment and Experimental Validation of Power Loss Contributions in Swash Plate Type Axial Piston Pumps. Energies 2019, 12, 3096. [Google Scholar] [CrossRef]
- Li, Y.; Yu, C.; Chen, G.; Yang, M.; Zhang, Y.; Wang, F. An Electro-Hydraulic-Load-Sensitive System on the Basis of Torque Open-Loop Control. Processes 2023, 11, 2618. [Google Scholar] [CrossRef]
- Kardoub, M.A.; Gad, O.E.; Rabie, M.G. Predicting Axial Piston Pump Performance Using Neural Networks; Elsevier Science Ltd.: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Zardin, B.; Natali, E.; Borghi, M. Evaluation of the Hydro-Mechanical Efficiency of External Gear Pumps. Energies 2019, 12, 2468. [Google Scholar] [CrossRef]
- Chiavola, O.; Frattini, E.; Palmieri, F.; Fiovanti, A.; Marani, P. On the Efficiency of Mobile Hydraulic Power Packs Operating with New and Aged Eco-Friendly Fluids. Energies 2023, 16, 5681. [Google Scholar] [CrossRef]
- Zhang, C.; Ruan, J.; Xing, T.; Li, S.; Meng, B.; Ding, C. Research on the Volumetric Efficiency of a Novel Stacked Roller 2D Piston Pump. Machines 2021, 9, 128. [Google Scholar] [CrossRef]
- Osiński, P.; Deptuła, A.; Partyka, M.A. Hydraulic Tests of the PZ0 Gear Micropump and the Importance Rank of Its Design and Operating Parameters. Energies 2022, 15, 3068. [Google Scholar] [CrossRef]
- Osiński, P.; Deptuła, A.; Partyka, M.A. Discrete optimization of a gear pump after tooth root undercating by means of multi-valuated logic trees. Arch. Civ. Mech. Eng. 2013, 13, 422–431. [Google Scholar] [CrossRef]
- Bergada, J.M.; Kumar, S.; Davies, D.L.; Watton, J. A complete analysis of axial piston pump leakage and output flow ripples. Appl. Math. Model. 2012, 36, 1731–1751. [Google Scholar] [CrossRef]
- Hujo, Ľ.; Noasin, J.; Borowski, S.; Markiewicz-Palaton, M.; Tomić, M.; Kožuch, P. Design of a Laboratory Test Equipment for Measuring and Testing Mobile Energy Means with Simulation of Operating Conditions. Processes 2022, 10, 1435. [Google Scholar] [CrossRef]
- Novak, N.; Trajkovski, A.; Kalin, M.; Majdič, F. Degradation of Hydraulic System due to Wear Particles or Medium Test Dust. Appl. Sci. 2023, 13, 7777. [Google Scholar] [CrossRef]
- Kolodin, I.; Ryabinin, M. Mathematical representation of pressure regulator with variable characteristic. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 589. [Google Scholar]
- Burennikov, Y. Design Optimization of the Flow Rate Regulator for Axial-Plunger LS Pump Using LP Search Method. In Proceedings of the 17th International Conference TEHNOMUS—New Technologies and Products in Machine Manufacturing Technologies, Suceava, Romania, 17–18 May 2013. [Google Scholar]
- Ma, H.; Liu, W.; Wu, D.; Shan, H.; Xia, S.; Xia, Y. Modelind and analysis of the leakage performance of the spherical valve plate pair in axial piston pumps. Eng. Sci. Technol. 2023, 45, 101498. [Google Scholar]
- Bureček, A.; Hružík, L.; Vašina, M. Determination of Undissolved Air Content in Oil by Means of a Compression Method. Stroj. Vestn. J. Mech. Eng. 2015, 61, 447–485. [Google Scholar] [CrossRef]
- Załuski, P. Experimental research of an axial piston pump with displaced swash plate axis of rotation. In International Scietific-Technical Conference on Hydraulic and Pneumatic Drives and Control; Springer: Berlin/Heidelberg, Germany, 2020; pp. 135–145. [Google Scholar]
- Zhu, Y.; Chen, X.; Zou, J.; Yang, H. A study on the influence of surface topography on the low-speed tribological performance of ports plates in axial piston pumps. Wear 2015, 338–339, 406–417. [Google Scholar] [CrossRef]
- Hong, Y.S.; Lee, S.Y. A Comparative Study of Cr-X-N (X=Zr, Si) Coatings for the Improvement of the Low-Speed Torque Efficiency of a Hydraulic Piston Pump. Met. Mater. Int. 2008, 14, 33–40. [Google Scholar]
- Jeong, H.-S.; Kim, H.-E. On the Instantaneous and average Piston Friction of Swash Plate Type Hydraulic Axial Piston Machines. KSME Int. J. 2004, 18, 1700–1711. [Google Scholar] [CrossRef]
- Chao, Q.; Xu, Z.; Tao, J.; Liu, C. Capped piston: A promising design to reduce compressibility effects, pressure ripple and cavitation for high-speed and high- pressure axial piston pumps. Alex. Eng. J. 2023, 62, 509–521. [Google Scholar] [CrossRef]
- Załuski, P. Influence of Fluid Compressibility and Movements of the Swash Plate Axis of Rotation on the volumetric Efficiency of Axial Piston Pumps. Energies 2022, 15, 298. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Relative Displacement β (–) | Set Displacement Vgset (cm3) |
|---|---|
| 1.00 | 18.30 |
| 0.75 | 13.73 |
| 0.50 | 9.15 |
| 0.25 | 4.58 |
| Symbol | Name and Type | Parameters |
|---|---|---|
| HP + PC | Pressure-compensated pump A10VSO 18 DR/31R | Displacement Vg = 18 cm3. |
| RV | Relief valve SR1A-B2/H355-B1 | Maximum operating pressure pmax = 420 bar. |
| PRV | Proportional relief valve SR4P2-B2/H21-24E1-A | Maximum operating pressure pmax = 350 bar. |
| FS | Flow rate sensor QG 100 | Measuring range: (0.2–30) dm3·min−1, measuring accuracy: 0.5%. |
| TeS | Temperature sensor Te 300 | Measuring range: (−50–200) °C, measuring accuracy: 0.2%. |
| PS 1 | Pressure sensor PR 300 | Measuring range: (−1–6) bar, measuring accuracy: 0.5%. |
| PS 2 | Pressure sensor PR 400 | Measuring range: (0–250) bar, measuring accuracy: 0.25%. |
| TS | Torque sensor Burster 8661-5200-v0202 | Measuring range: (−200–200) N·m, measuring accuracy: 0.05%. |
| SS | Speed sensor HySense RS 100 | Pulsing frequency: 500 Hz. |
| F | Filter MPF100 2AG2P01 | Particle size: 25 μm. |
| C | Cooler HY024.1-01A | Power: QC = (6.7–10.5) kW. |
| T | Tank | Volume: VN = 125 dm3. |
| M | Electric motor 1LE1002-1CB2 | Power of electric motor: PEM = 7.5 kW. |
| FC | Frequency converter VECTOR V350 | Power: 7.5 kW. |
| MS 5070 | Multisystem MS 5070 |
| β = 1.00 | β = 0.75 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| n (min−1) | 350 | 500 | 750 | 1000 | 1250 | 1500 | 350 | 500 | 750 | 1000 | 1250 | 1500 | |
| pPC (bar) | |||||||||||||
| 50 | 0.56 | 0.62 | 0.67 | 0.69 | 0.71 | 0.73 | 0.54 | 0.58 | 0.63 | 0.67 | 0.70 | 0.71 | |
| 75 | 0.61 | 0.69 | 0.70 | 0.70 | 0.78 | 0.79 | 0.55 | 0.64 | 0.64 | 0.69 | 0.72 | 0.77 | |
| 100 | 0.66 | 0.76 | 0.94 | 1.23 | 1.23 | 1.27 | 0.62 | 0.74 | 0.88 | 0.96 | 1.10 | 1.14 | |
| 125 | 0.82 | 0.89 | 1.14 | 1.21 | 1.27 | 1.31 | 0.66 | 0.88 | 0.92 | 1.06 | 1.17 | 1.18 | |
| 150 | 1.21 | 1.24 | 1.39 | 1.65 | 1.64 | 1.75 | 0.81 | 1.00 | 1.13 | 1.31 | 1.41 | 1.47 | |
| β = 0.50 | β = 0.25 | ||||||||||||
| 50 | 0.47 | 0.50 | 0.51 | 0.51 | 0.53 | 0.56 | 0.43 | 0.44 | 0.47 | 0.49 | 0.52 | 0.53 | |
| 75 | 0.51 | 0.60 | 0.61 | 0.67 | 0.67 | 0.76 | 0.49 | 0.53 | 0.58 | 0.64 | 0.66 | 0.70 | |
| 100 | 0.61 | 0.70 | 0.86 | 0.93 | 0.96 | 1.09 | 0.54 | 0.61 | 0.83 | 0.89 | 0.90 | 0.93 | |
| 125 | 0.65 | 0.74 | 0.91 | 1.03 | 1.13 | 1.15 | 0.59 | 0.67 | 0.71 | 0.91 | 1.08 | 1.10 | |
| 150 | 0.74 | 0.82 | 0.96 | 1.20 | 1.14 | 1.19 | 0.62 | 0.75 | 0.83 | 0.93 | 1.10 | 1.17 | |
| Label | State Description |
|---|---|
| SBC | The state before control |
| SADC | The state after displacement control |
| SASC | The state after speed control |
| SABC | The state after both controls |
| Displacement Control | Speed Control | Both Controls | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| pPC (bar) | 150 | 125 | 100 | 75 | 50 | 150 | 125 | 100 | 75 | 50 | 150 | 125 | 100 | 75 | 50 | |
| β (-) | ||||||||||||||||
| 1.00 | 86.2 | 86.8 | 87.5 | 87.6 | 87.4 | 75.4 | 75.6 | 76.1 | 76.4 | 77.1 | 90.5 | 91.4 | 92.3 | 92.9 | 93.6 | |
| 0.75 | 81.4 | 82.8 | 83.6 | 83.6 | 82.6 | 76.1 | 76.5 | 76.5 | 77.2 | 76.6 | 87.9 | 89.1 | 89.9 | 91.0 | 91.6 | |
| 0.50 | 71.7 | 74.9 | 75.7 | 75.5 | 75.6 | 76.8 | 77.0 | 77.2 | 76.9 | 77.1 | 82.4 | 84.0 | 85.5 | 86.5 | 88.2 | |
| 0.25 | 49.9 | 51.2 | 54.2 | 57.0 | 53.7 | 77.7 | 77.6 | 77.8 | 78.0 | 77.8 | 77.7 | 77.6 | 77.8 | 78.0 | 80.2 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolář, D.; Bureček, A.; Hružík, L.; Ledvoň, M.; Polášek, T.; Jablonská, J.; Lenhard, R. Static Characteristics and Energy Consumption of the Pressure-Compensated Pump. Processes 2024, 12, 1081. https://doi.org/10.3390/pr12061081
Kolář D, Bureček A, Hružík L, Ledvoň M, Polášek T, Jablonská J, Lenhard R. Static Characteristics and Energy Consumption of the Pressure-Compensated Pump. Processes. 2024; 12(6):1081. https://doi.org/10.3390/pr12061081
Chicago/Turabian StyleKolář, David, Adam Bureček, Lumír Hružík, Marian Ledvoň, Tomáš Polášek, Jana Jablonská, and Richard Lenhard. 2024. "Static Characteristics and Energy Consumption of the Pressure-Compensated Pump" Processes 12, no. 6: 1081. https://doi.org/10.3390/pr12061081