Research on the Ghost Cell Immersed Boundary Method for Compressible Flow

Abstract
1. Introduction
2. Numerical Method
2.1. IBM Introduction
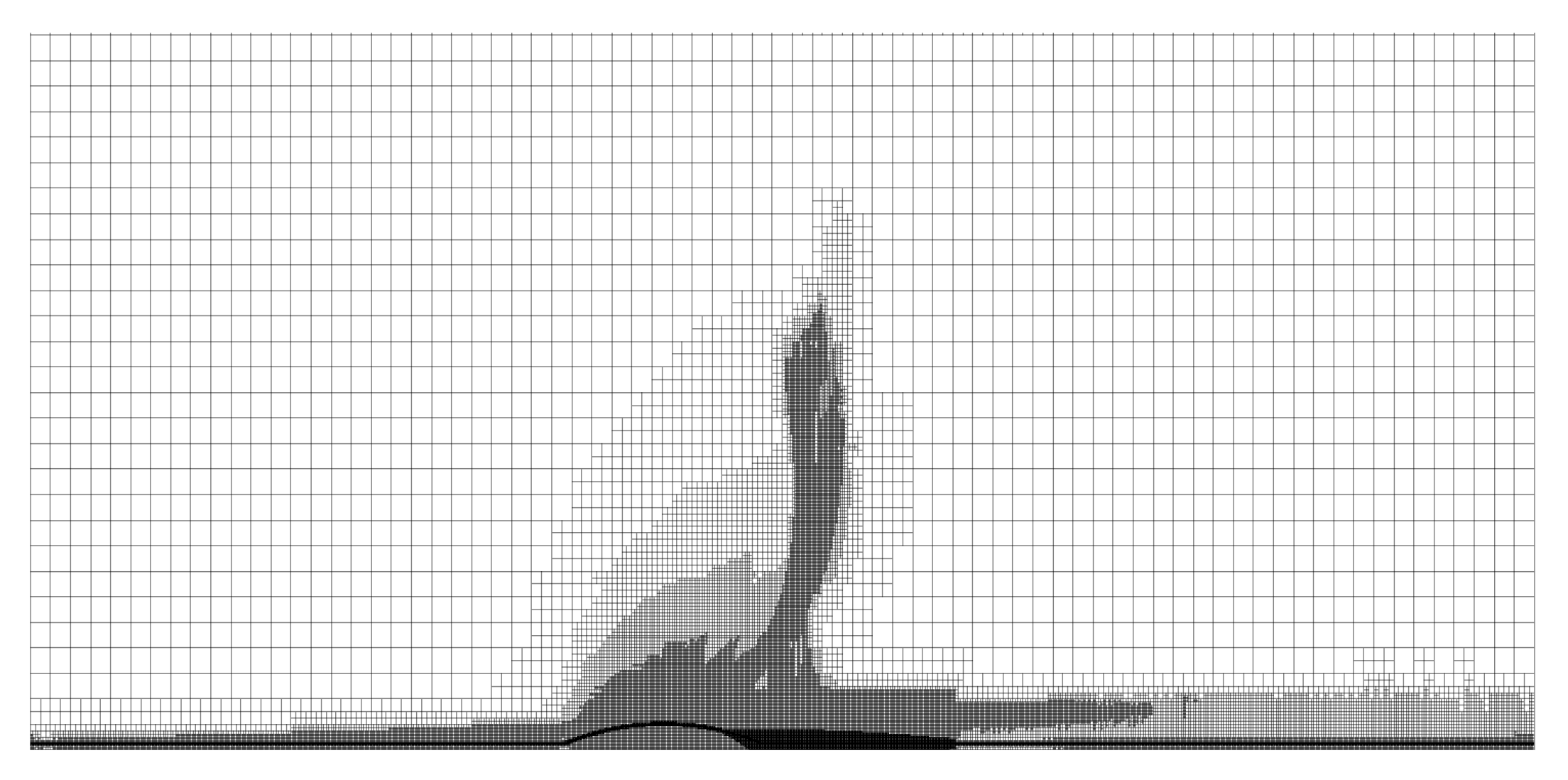
2.2. Mesh Refinement Scheme
2.3. Wall Function
3. Numerical Tests
3.1. Two-Dimensional Supersonic Inviscid Flow
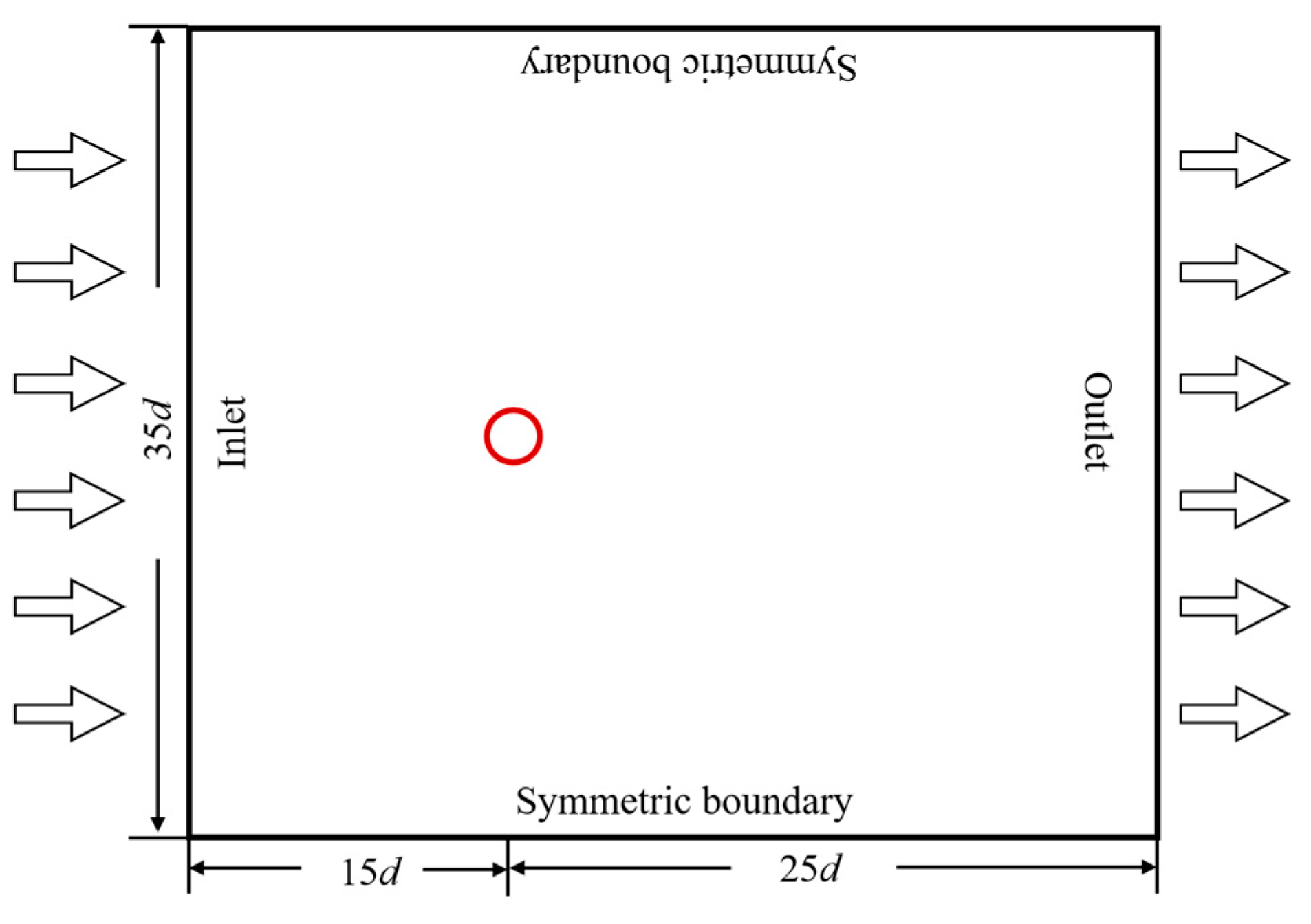
3.2. Flow around the Circular Cylinder
3.2.1. Low-Speed Flow
3.2.2. Supersonic Flow
3.3. Single Rotor Cascade of an Axial-Flow Compressor
3.3.1. Overall Performance
3.3.2. PE Working Condition
3.3.3. NS Working Condition
3.3.4. Discussion
4. Conclusions
- With the help of the AMR technique and the wall function, it is verified by three cases that the ghost cell IBM can be applied to numerical simulation of compressible flow. Compared with the results based on the body-fitted mesh, more detailed and useful information is obtained via the IBM, though calculation costs are a little higher.
- Based on the AMR presented in this paper, the scale of the mesh adopted in the IBM is controlled, and calculation efficiency is subsequently increased. The final mesh is determined by the criteria. As the criteria are different, the final mesh is different, even if the same geometry and calculation domain are used.
- The wall function is a very useful tool in the calculation of turbulence. Combined with the IBM, it can increase the calculation efficiency further when the boundary layer is extremely thin.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Drag coefficient | Diameter of cylinder | ||
| Lift coefficient | Frequency of vertical component of the aerodynamic force | ||
| Pressure coefficient | Pressure | ||
| Horizontal component of the aerodynamic force | Tangential component of velocity | ||
| Vertical component of the aerodynamic force | Stress shear velocity | ||
| Near-wall speed | Velocity of incidence flow | ||
| Given threshold | |||
| Greek symbols | |||
| General variable | Circumferential angle of cylinder | ||
| Density of steam |
References
- Gong, Z.-X.; Lu, C.-J.; Huang, H.-X. Immersed boundary method and its application. Chin. Q. Mech. 2007, 28, 353–362. (In Chinese) [Google Scholar]
- Peskin, C.S. The immersed boundary method. Acta Numer. 2002, 11, 479–517. [Google Scholar] [CrossRef]
- Peskin, C.S. The fluid dynamics of heart valves: Experimental, theoretical, and computational methods. Annu. Rev. Fluid Mech. 1982, 14, 235–259. [Google Scholar] [CrossRef]
- Zhu, L.; Peskin, C.S. Interaction of two flapping filaments in a flowing soap film. Phys. Fluids 2003, 15, 1954–1960. [Google Scholar] [CrossRef]
- Xu, D.; Xu, H.; Chun, N.; Yang, H.; Zhang, B. Direct-forcing immersed boundary method for incompressible viscous flow and its software implementation. Chin. J. Comput. Mech. 2019, 36, 520–527. (In Chinese) [Google Scholar]
- Lai, M.C.; Peskin, C.S. An immersed boundary method with formal second-order accuracy and reduced numerical viscosity. J. Comput. Phys. 2000, 160, 705–719. [Google Scholar] [CrossRef]
- Mittal, R.; Iaccarino, G. Immersed boundary methods. Annu. Rev. Fluid Mech. 2005, 37, 239–261. [Google Scholar] [CrossRef]
- Majumdar, S.; Iaccarino, G.; Durbin, P. RANS solvers with adaptive structured boundary non-conforming grids. Annu. Res. Briefs 2001, 1, 179. [Google Scholar]
- Iaccarino, G.; Verzicco, R. Immersed boundary technique for turbulent flow simulations. Appl. Mech. Rev. 2003, 56, 331–347. [Google Scholar] [CrossRef]
- Ghias, R.; Mittal, R.; Dong, H. A sharp interface immersed boundary method for compressible viscous flows. J. Comput. Phys. 2007, 225, 528–553. [Google Scholar] [CrossRef]
- Takahashi, Y.; Imamura, T. High Reynolds number steady state flow simulation using immersed boundary method. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014; p. 0228. [Google Scholar]
- Tamaki, Y.; Harada, M.; Imamura, T. Near-wall modification of Spalart–Allmaras turbulence model for immersed boundary method. AIAA J. 2017, 55, 3027–3039. [Google Scholar] [CrossRef]
- Constant, B.; Péron, S.; Beaugendre, H.; Benoit, C. An improved immersed boundary method for turbulent flow simulations on Cartesian grids. J. Comput. Phys. 2021, 435, 110240. [Google Scholar] [CrossRef]
- Ye, H.; Chen, Y.; Maki, K. A discrete-forcing immersed boundary method for turbulent-flow simulations. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2021, 235, 188–202. [Google Scholar] [CrossRef]
- Luo, K.; Zhuang, Z.; Fan, J.; Haugen, N.E.L. A ghost-cell immersed boundary method for simulations of heat transfer in compressible flows under different boundary conditions. Int. J. Heat Mass Transf. 2016, 92, 708–717. [Google Scholar] [CrossRef]
- Chi, C.; Abdelsamie, A.; Thévenin, D. A directional ghost-cell immersed boundary method for incompressible flows. J. Comput. Phys. 2020, 404, 109122. [Google Scholar] [CrossRef]
- Zhang, Y.; Fang, X.; Zou, J.; Shi, X.; Ma, Z.; Zheng, Y. Numerical simulations of shock/obstacle interactions using an improved ghost-cell immersed boundary method. Comput. Fluids 2019, 182, 128–143. [Google Scholar] [CrossRef]
- Liu, X.; Yang, B.; Ji, C.; Chen, Q.; Song, M. Research on the Turbine Blade Vibration Base on the Immersed Boundary Method. ASME J. Fluids Eng. 2018, 140, 061402. [Google Scholar] [CrossRef]
- Yan, C.; Huang, W.-X.; Cui, G.-X.; Xu, C.; Zhang, Z.-S. A ghost-cell immersed boundary method for large eddy simulation of flows in complex geometries. Int. J. Comput. Fluid Dyn. 2015, 29, 12–25. [Google Scholar] [CrossRef]
- Schmidmayer, K.; Petitpas, F.; Daniel, E. Adaptive Mesh Refinement Algorithm Based on Dual Trees for Cells and Faces for Multiphase Compressible Flows. J. Comput. Phys. 2019, 388, 252–278. [Google Scholar] [CrossRef]
- Allmaras, S.R.; Johnson, F.T. Modifications and clarifications for the implementation of the Spalart-Allmaras turbulence model. In Proceedings of the 7th International Conference on Computational Fluid Dynamics (ICCFD7), Big Island, HI, USA, 9–13 July 2012. [Google Scholar]
- Bachalo, W.D.; Johnson, D.A. Transonic, turbulent boundary-layer separation generated on an axisymmetric flow model. AIAA J. 1986, 24, 437–443. [Google Scholar] [CrossRef]
- Iyer, P.S.; Park, G.I.; Malik, M.R. Wall-modeled large eddy simulation of transonic flow over an axisymmetric bump with shock-induced separation. In Proceedings of the 23rd AIAA Computational Fluid Dynamics Conference, Denver, CO, USA, 5–9 June 2017; p. 3953. [Google Scholar]
- Jespersen, D.C.; Pulliam, T.H.; Childs, M.L. Overflow Turbulence Modeling Resource Validation Results; NASA Technical Report; NASA AMES Research Center: Mountain View, CA, USA, 2016. [Google Scholar]
- Potter, M.C.; Wiggert, D.C. Schaum’s Outline of Fluid Mechanics; McGraw-Hill Education: New York, NY, USA, 2016; ISBN 13 978-1305635173. [Google Scholar]
- Bashkin, V.A.; Vaganov, A.V.; Egorov, I.V.; Ivanov, D.V.; Ignatova, G.A. Comparison of calculated and experimental data on supersonic flow past a circular cylinder. Fluid Dyn. 2002, 37, 473–483. [Google Scholar] [CrossRef]
- De Palma, P.; De Tullio, M.D.; Pascazio, G.; Napolitano, M. An immersed-boundary method for compressible viscous flows. Comput. Fluids 2006, 35, 693–702. [Google Scholar] [CrossRef]
- Yuan, R.; Zhong, C. An immersed-boundary method for compressible viscous flows and its application in the gas-kinetic BGK scheme. Appl. Math. Model. 2018, 55, 417–446. [Google Scholar] [CrossRef]
- Zhu, G.M. A Study of Inlet Distortion Influence and Stall Margin Enhancement Method in Axial Compressor. Ph.D. Thesis, Shanghai Jiaotong University, Shanghai, China, 2022. (In Chinese). [Google Scholar]
- Barth, T.; Jespersen, D. The design and application of upwind schemes on unstructured meshes. In Proceedings of the 27th Aerospace Sciences Meeting, Reno, NV, USA, 9–12 January 1989. [Google Scholar]
- Hewkin-Smith, P.; Pullan, G. The role of tip leakage flow in spike-type rotating stall inception. ASME J. Turbomach. 2019, 141, 061010. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Red | Cd (IBM) | Cd (EXP [25]) | Cd Error% | St (IBM) | St (EXP [25]) | St Error% |
|---|---|---|---|---|---|---|
| 100 | 1.452 | 1.375 | 5.60 | 0.171 | 0.166 | 3.012 |
| 150 | 1.417 | 1.361 | 4.115 | 0.185 | 0.183 | 1.093 |
| 200 | 1.412 | 1.346 | 4.903 | 0.198 | 0.197 | 0.508 |
| Present IBM | 111° | 1.41 |
| Bashkin et al. (Exp.) [26] | 112° | 1.43 |
| De Palma et al. (IBM) [27] | 111° | 1.39 |
| Yuan and Zhong (IBM) [28] | 119° | 1.45 |
| Parameter | Value |
|---|---|
| Rotation speed (rpm) | 4010 |
| Pressure ratio | 1.15 |
| Volume coefficient | 0.0783 |
| Rotor tip difference ratio () | 0.001 |
| Hub ratio | 0.91 |
| Ma (blade tip of the rotor) | 0.698 |
| Blade number | 93 |
| Grid | Grid Number (×108) |
|---|---|
| Grid 1 | 1 |
| Grid 2 | 2.5 |
| Grid 3 | 5 |
| Grid 4 | 8 |
| Grid 5 | 12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Song, M.; Zhu, G. Research on the Ghost Cell Immersed Boundary Method for Compressible Flow. Processes 2024, 12, 1182. https://doi.org/10.3390/pr12061182
Yang B, Song M, Zhu G. Research on the Ghost Cell Immersed Boundary Method for Compressible Flow. Processes. 2024; 12(6):1182. https://doi.org/10.3390/pr12061182
Chicago/Turabian StyleYang, Bo, Moru Song, and Guoming Zhu. 2024. "Research on the Ghost Cell Immersed Boundary Method for Compressible Flow" Processes 12, no. 6: 1182. https://doi.org/10.3390/pr12061182
APA StyleYang, B., Song, M., & Zhu, G. (2024). Research on the Ghost Cell Immersed Boundary Method for Compressible Flow. Processes, 12(6), 1182. https://doi.org/10.3390/pr12061182