Abstract
Proton exchange membrane fuel cells (PEMFCs) are attracting attention for their green, energy-saving, and high-efficiency advantages, becoming one of the future development trends of renewable energy utilization. However, there are still deficiencies in the gas supply system control strategy that plays a crucial role in PEMFCs, which limits the rapid development and application of PEMFCs. This paper provides a comprehensive and in-depth review of the PEMFC air delivery system (ADS) and hydrogen delivery system (HDS) operations. For the ADS, the advantages and disadvantages of the oxygen excess ratio (OER), oxygen pressure, and their decoupling control strategies are systematically described by the following three aspects: single control, hybrid control, and intelligent algorithm control. Additionally, the optimization strategies of the flow field or flow channel for oxygen supply speeds and distribution uniformity are compared and analyzed. For the HDS, a systematic review of hydrogen recirculation control strategies, purge strategies, and hydrogen flow control strategies is conducted. These strategies contribute a lot to improving hydrogen utilization rates. Furthermore, hydrogen supply pressure is summarized from the aspects of hybrid control and intelligent algorithm control. It is hoped to provide guidance or a reference for research on the HDS as well as the ADS control strategy and optimization strategy.
1. Introduction
The consumption of fossil energy leads to the emission of large quantities of greenhouse gases, such as carbon dioxide, while global warming has led to the frequent occurrence of severe and extreme weather [1]. The vigorous development of renewable energy as an alternative to fossil energy is the main course of action to achieve global carbon neutrality [2]. Hydrogen energy is renewable as well as environmentally friendly, making it a major direction for research and application [3,4]. PEMFCs can convert the internal chemical energy of hydrogen into electrical energy through the chemical reaction of hydroxide and utilize it rationally. It has the advantages of environmentally friendly emissions, stable system operation, and high efficiency [5].
The structure of the PEMFC system mainly consists of a stack, an ADS, a HDS, a water management system, a thermal management system, and a control system, as shown in Figure 1. The operation of the PEMFC works by utilizing a chemical reaction between hydrogen and air and finally converting the resulting chemical energy into electrical energy. By controlling the hydrogen and air recirculation ratio, supply pressure, and supply flow rate, the PEMFC system’s output performance can be improved. Therefore, reasonable and accurate control of the ADS and the HDS is very important to improve the output performance of PEMFC [6,7].
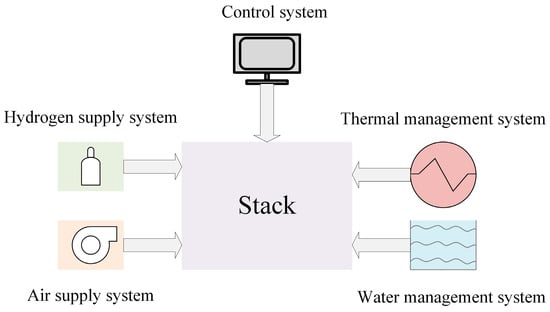
Figure 1.
PEMFC structure diagram.
In recent years, researchers have studied the equipment of the ADS and described the coupling of the air compressor and the PEMFC system. They improve the PEMFC system’s stability and output performance during operation through the matching of the compressor and expander in the ADS [8,9]. However, for a vehicle PEMFC, the use of too many devices increases the volume of the PEMFC system, which is not conducive to practical applications. Therefore, it is significant to adopt excellent control strategies for the ADS and the HDS to effectively improve the overall output performance while reducing the overall volume of the PEMFC system. Fuzzy control strategies based on fuzzy logic, adaptive control strategies that can adjust the control parameters in real-time, and active disturbance rejection control strategies counteract the internal and external disturbances of the system. Those control strategies have been widely used in the ADS and the HDS. They have achieved effective control effects and improved system performance [10,11]. In addition, by incorporating a hybrid control strategy into the ADS and the HDS, the advantages of multiple single control strategies can be combined to enhance the control system’s overall performance. However, the design of complex hybrid control strategies is difficult, and sometimes, it needs to rely on expert experience, which is not conducive to commercial promotion. In recent years, with the rise of intelligent algorithm control strategies, scholars have applied intelligent algorithm control strategies to the PEMFC system. These include collective intelligence exploration distributed multi-delay deep deterministic policy gradient algorithm control strategies to manage gas supply flow [12,13] and deep learning algorithms combined with traditional PID control strategies to manage gas supply flow [14] and temperature [15]. These studies have yielded impressive results. However, the control system’s accuracy and robustness need to be further improved. At present, related research is still in the exploratory stage of a hundred schools of thought. It has not yet formed an excellent control strategy that is generally recognized as having commercial promotion value.
The aim of this paper is to summarize the control strategies and optimization strategies for the PEMFC gas delivery system, as shown in Figure 2, and to provide a comprehensive overview of the extent to which the control strategies and optimization strategies for the delivery gas flow and pressure affect the overall performance of the PEMFC system. It also provides guiding values for subsequent studies on the control strategies of the ADS and HDS. The content and structure of this paper are as follows: Section 2 aims to summarize the oxygen supply flow and supply pressure-related control strategies and oxygen supply optimization strategies of the ADS; Section 3 aims to describe the hydrogen recirculation, hydrogen supply flow, and supply pressure-related control strategies of the HDS; and Section 4 provides an overview of the whole paper as well as the direction of future development for the control strategies of the ADS and the HDS.
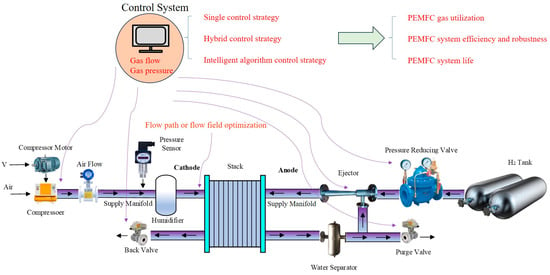
Figure 2.
The overall study program for the PEMFC gas delivery system.
2. ADS
The ADS is an important PEMFC subsystem, and reasonable control of the air supply flow and supply pressure is conducive to improving the PEMFC system’s overall performance. A common structure of an ADS is shown in Figure 3. As the air is purified, it is transported to the gas supply manifold by the compressor. After gas humidification, it is finally supplied to the PEMFC stack for reaction, and the residue after the reaction is discharged through the back pressure valve [16]. The control system in the ADS is to analyze the errors in the signals from the pressure sensor and the flow sensor. Furthermore, the input voltage of the motor is varied by the output of the control algorithm, and the different input voltages of the motor are utilized to control the rotational speed of the air compressor to achieve control of the air supply flow and the air supply pressure to the stack [17]. In recent years, the research of scholars has mainly focused on the oxygen excess rate (OER) control strategy, pressure control strategy, and oxygen transport optimization strategy in the ADS.
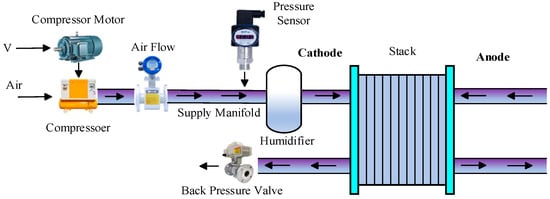
Figure 3.
Structure diagram of PEMFC ADS.
2.1. OER Control of ADS
OER is the ratio of oxygen delivery to reaction consumption [18,19]. Controlling the OER is the realized control effect of controlling the oxygen flow required by the PEMFC system to the desired value by controlling the speed of the air compressor to change the airflow supplied to the stack when there is a change in the load or a disturbance [20]. If the delivered oxygen flow is too much, it increases the energy consumed by the air compressor, which reduces the PEMFC system’s efficiency; if the delivered oxygen flow is not enough, there is damage to the PEMFC system components due to the lack of oxygen, which is detrimental to the PEMFC system’s service life [21,22]. Therefore, effective OER control strategies are conducive to enhancing the PEMFC system’s robustness, output efficiency, and service life. Scholars’ research around OER control strategies mainly contains single control strategies, hybrid control strategies, and intelligent algorithm control strategies.
2.1.1. Single Control Strategy
Since the single control strategies of OER are easy to realize, scholars conduct a large number of related research studies. Chen et al. [23] and Zhao et al. [24] used a feedback linearization controller and a dynamic feedforward controller based on load moment, respectively, which can achieve a good OER tracking control effect, but the control system’s robustness needs to be improved. A robust reset controller based on a field programmable gate array was proposed by Wu et al. [25] to improve the system’s robustness, and OER has a better tracking control effect than fuzzy PID. Hu et al. [26] used a robust nonlinear controller based on a three-step method to track OER and construct feedforward and feedback control for tracking errors. Compared to conventional PID control, this control strategy is more effective, but the performance of this control strategy is poor when disturbances and faults occur. Therefore, Wang et al. [27] adopted a dynamic surface three-step fault-tolerant control strategy to control OER, designed a hierarchical control structure, and constructed a first-order three-step controller in each layer. When the system has disturbances and faults, it can reconstruct the controller design, and the control effect is better.
In addition to the presence of disturbance, the PEMFC system has a complexity that leads to uncertainty in the selection of parameters for modeling the system, which increases the control difficulty. Therefore, Sun et al. [28] and Han et al. [29,30] adopted an ADRC based on data-driven and an MRAC to control OER, respectively, and the research showed that when the system model parameters could not be selected accurately as well as when perturbations were present, ADRC and adaptive control could accurately track and control OER. The above control strategies need to establish an accurate PEMFC system model but cannot avoid modeling errors; therefore, Ziane et al. [31] proposed a model-free controller, which replaces the accurate mathematical model of the system with a hyperlocal model and obtains the controller parameters through state estimation and algorithm iteration. Although there is no accurate model, the model-free controller has better overshoot as well as response times compared to traditional PID controllers as well as fuzzy PID controllers.
Overall, the single control strategy is easy to implement, and the current novel control strategy performance is superior compared to traditional PID and fuzzy PID control strategies. As shown in Table 1, it can be seen from the table that the absolute error of the active disturbance rejection controller and the adaptive controller is small. However, a single control is difficult to balance in terms of control accuracy as well as the system’s ability to resist disturbances, so a hybrid control strategy can be adopted to synthesize the advantages of a single control strategy to enhance the control system’s performance.

Table 1.
Single control strategy controls OER.
2.1.2. Hybrid Control Strategy
The PEMFC system is a complex multi-input and multi-output system, and the hybrid control strategy can integrate multiple single control strategies to obtain better performance while overcoming the shortcomings of a single control strategy to improve the overall control performance. The research shows that the improvement of PID control or the combination of PID and other control strategies can effectively solve the problem that the traditional PID cannot adequately control the nonlinear system and has poor resist disturbance ability. The OER can adjust to the expected value with faster speed and less overshoot when the system power requirements change. Liu et al. [32] adopted a controller to control OER, which is composed of segmented control, feedforward control, state feedback control, and the double-loop decoupling control, and the results show that the control effect is not favorable when there are many disturbances. A study conducted by Sharma et al. [33] employed integer-order PID(IOPID) cascade controllers and fractional-order PID(FOPID) cascade controllers to control OER and introduce fractional differentials in the PEMFC system, which can improve the OER control when there are more disturbances. In addition, the OER was controlled with an unknown input nonlinear observer combined with an FOPID by Zhao et al. [34].
The magnitude of the OER is obtained through a nonlinear observer, and the error of FOPID control is smaller. Compared with the traditional PID control strategy, the above control strategy with improved PID has better performance, but the control system response time and steady-state time need to be improved when the system power requirements change. Wang et al. [35] adopted a parallel coupling controller for model predictive control and PID control. By inputting the deviation value of the model predictive control optimized to the PID controller, faster and more accurate OER control can be achieved, but the control system’s robustness needs to be improved. The Lyapunov-based hybrid model reference adaptive PD controller adopted by Wu et al. [36] can improve the PEMFC system’s robustness and stability while stabilizing the OER control. However, the MRAC relies more on an accurate model, so if the system model differs significantly from the actual system, poor control may result. Xu et al. [37] used a hybrid adaptive second-order sliding mode control strategy and a nonlinear PI feedback control strategy to control the OER. Sliding mode control does not need an accurate model; it only needs to know the variation range of system parameters to achieve accurate OER tracking control. However, the difficulty of the sliding mode control design and debugging is relatively large, while fuzzy control can be realized by simply setting the corresponding fuzzy rules. Using a fuzzy logic controller, a fuzzy self-tuning PID(FSTPID) controller, and a fuzzy selector, Baroud et al. [38] developed a new fuzzy-PID controller. By combining the empirical formulas and the FSTPID controller, the PID proportional coefficients, integral coefficients, and differential coefficients were optimally tuned, enabling more accurate OER control. Furthermore, Yang et al. [39] adopted the combination of Takagi-Sugeno fuzzy control and model predictive control to improve the system’s robustness. In contrast, type II fuzzy control is easier to use, but the modeling ability may be affected, so Zhang et al. [40], through the combination of a type-2 fuzzy logic system and an adaptive robust (T2-FLS) controller, utilized the properties of the adaptive control strategy to approximate the dynamic changes in the model parameters. Finally, Lyapunov’s theory was used to prove that the system tracking error is consistently ultimate and bounded. Figure 4 shows the error tracking curve of the T2-FLS controller controlling OER. The OER tracking error is e, fluctuates little, and stabilizes in a short time.
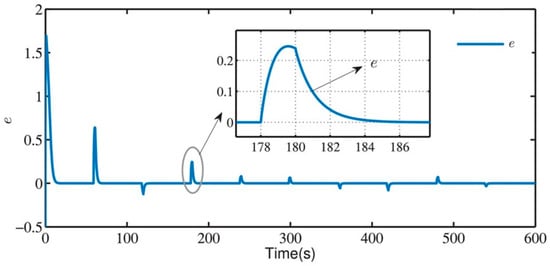
Figure 4.
T2-FLS controller OER error tracking control curve [40].
The internal complexity of the PEMFC system determines that the internal air content and distribution cannot be accurately measured during the operation of the system. Combined with an observer control strategy, fast and accurate OER tracking control can be maintained. Sankar et al. [41] proposed a hybrid reduced-dimensional sliding mode observer (SMO) and a nonlinear control controller to control OER. The research shows that the response speed and overshoot of this control strategy are better than those of traditional PI control, but the adaptability of the control system is not strong, and the control precision is not high. Therefore, Ma et al. [42] adopted a nonlinear, three-step controller combined with an observer; Ma et al. [43] proposed a reduced-dimensional active disturbance rejection controller combined with a reduced-dimensional extended state observer; and Deng et al. [44] used a cascade adaptive sliding mode (NC-ASM)-controller combined with a high-order sliding mode observer. The results of experimental and simulation studies show that the control system’s accuracy and robustness can be effectively improved by adding a nonlinear control strategy, an active disturbance suppression control strategy, and an adaptive sliding mode control strategy to the hybrid control strategy system. However, the design complexity of these controllers is relatively high. For this reason, Hu et al. [45] incorporated adaptive compensation in the fused multi-model predictive controller (FM-MPC), while Li et al. [46] used a data-driven-constrained adaptive predictive controller. Both of these can achieve high control accuracy in the OER and strong robustness in the control system. To reduce the complexity of the control process, Abbaker et al. [47] adopted a cascade adaptive integral terminal sliding mode controller (CASCADED-AITSMCTDE) combined with a time-delay estimation (TDE) algorithm, used TDE technology to approach unknown, uncertain dynamics, and combined the advantages of utilizing adaptive control strategies as well as sliding mode control strategies to realize accurate OER tracking control while reducing computational difficulty. Figure 5 depicts the CASCADED-AITSMCTDE controller’s OER tracking control curves. Compared to the single-loop AITSMC controller, the CASCADED-ITSMC controller, and the CASCADED-ISMC-TDE controller, the proposed controllers can realize the OER tracking error e1 control effect with fast response speed and small overshoot.
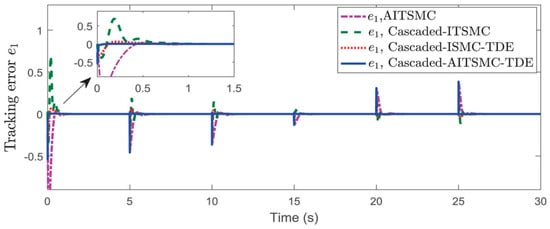
Figure 5.
OER error tracking curve of CASCADED-ITSMC controller and other control strategies [47].
Overall, the hybrid control strategy can integrate multiple single control strategies to obtain better overall control effects and robustness while overcoming the shortcomings of a single control strategy. The improved PID control strategy, or the hybrid control combining PID and other control strategies, is shown in Table 2. From the data in the table, it can be concluded that the fractional-order PID control strategy, the fusion model predictive control strategy, and the PID control strategy are significantly superior compared to the PID control strategy, and the absolute error (IAE) of the controller is small. The added adaptive control strategy and model predictive control strategy to the hybrid control strategy enhances the robustness and control accuracy of the control system. As shown in Table 3, the root mean square error (RMSE) of the control system can be effectively reduced by adding adaptive control and model predictive control. Therefore, to enhance the overall control system performance, priority can be given to the integration of adaptive control strategies and model predictive control strategies into the hybrid control strategy. Meanwhile, the addition of fuzzy control can reduce the complexity of controller design, but sometimes, it depends on expert experience, which is not conducive to implementation. Therefore, the hybrid control strategy cannot take into account control accuracy, robustness, adaptability, and overall system design complexity. In recent years, scholars have integrated intelligent algorithms into the control system. Using the strong adaptability, learning ability, and processing ability of intelligent algorithms can further enhance the control system’s overall performance while reducing the control system’s design complexity.
Table 2.
Hybrid PID control strategy controls for OER.
Table 3.
Hybrid adaptive and model predictive control strategy control for OER.
2.1.3. Intelligent Algorithm Control Strategy
The PEMFC system is more nonlinear, and the use of hybrid control has high complexity and makes it difficult to adjust the parameters. In addition to a single and hybrid control strategy, scholars also adopt intelligent algorithmic control strategies, such as optimization algorithms, neural networks, deep learning, etc. Intelligent algorithm control strategies have strong adaptive ability, learning ability, and processing ability, which is an effective measure to solve the problem of the control system’s high complexity and difficult parameter adjustment [48]. Also, this can effectively enhance the PEMFC system’s efficiency and robustness.
Sun et al. [49] adopted the PI controller combined with the Euler iterative algorithm to control OER. The control process is simple. However, the control accuracy is not enough. A fuzzy logic controller combined with a genetic algorithm [50] and a nonlinear predictive controller based on a power coordination algorithm was used [51]. Both of these can improve control accuracy by about 4%. However, it is difficult to change the parameters of the control algorithm because the PEMFC system is so complicated. Chen et al. [52] adopted the super-twist algorithm to control the air compressor to control OER and only needed to determine the super-twist function of OER to achieve the accurate control of OER. The research shows that the control system has a fast response speed. An extended state observer (ESO) combined with a second-order sliding mode (SOSM) algorithm controller was proposed by Liu et al. [53]; an algebraic observer combined with an SOSM algorithm feedback controller was used by Zakaria et al. [54]. The strong adaptability and high control precision of the SOSM algorithm can enhance the overall control of the system’s performance. Furthermore, Yin et al. [55] combined an SM nonlinear controller with an adaptive super-twist (ASTW) algorithm, and Deng et al. [56] used a two-stage sliding mode + fuzzy feedforward (TS_SM_STW + Fuzzy_FF) controller combined with the STW algorithm. The controller can take into account the advantages of the STW algorithm and the SM algorithm, which makes the control system perform well in terms of response speed, adaptability, and control accuracy.
To reduce the control system’s difficulty in designing its computational complexity, Yuan et al. [57] combined the adaptive cubic Kalman filter (ACKF) algorithm with a feedback control strategy, which only needed to quantify the uncertainty of state estimation through the covariance matrix and is combined with the feedback control to achieve small OER overshoot and fast response control, but the disturbance suppression ability of the system needs to be improved. Yue et al. [58] combined the improved active disturbance rejection control (IADRC) strategy with the adaptive unscented Kalman filter (AUKF) and used the unscented transform (UT) method to obtain the system state predictive value, which can avoid linearization caused by approximation error. Combined with ADRC, the control system has stronger adaptability, higher control accuracy, and a better control effect in actual road conditions. The research results are shown in Figure 6 when power requirements change. IADRC can realize the rapid tracking control of OER with almost no overshoot.
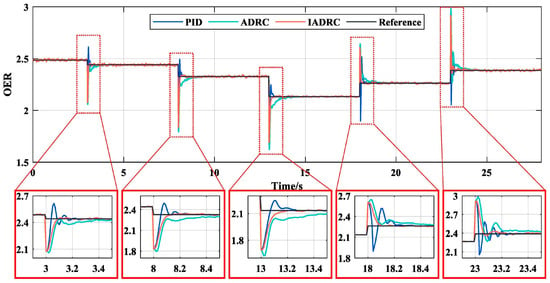
Figure 6.
IADRC and PID control and OER tracking response curve of ADRC when load current changes [58].
PEMFC systems are time-varying, multivariate, and nonlinear, and the use of an optimization algorithm may lead to the problem of a local optimal solution and poor adaptability of the system. Therefore, the adaptability and learning ability of neural networks are used to enhance the control system’s overall performance and robustness. Several methods were used to control OER by Wang et al. These methods include the adaptive neural network control with an observer [59], a robust adaptive control combined with an RBF neural network [60], a combined high-gain observer with a robust compound adaptive neural network control [61], and a neural network and a predetermined performance function-based control [62]. The research results show that with the addition of the observer and adaptive control, the control system root mean square error (RMSE) is small, and its performance is superior, as shown in Table 4. AbouOmar et al. [63] combined a neural network algorithm with the interval type 2 fuzzy (IT2FPID) controller and then adaptively tuned the parameters of the neural network and the fuzzy controller using the results of optimization and a differential evolutionary algorithm so that the control system could better deal with uncertainties and changes in the system and have good robustness, as shown in Figure 7. When power requirements change, compared with NNA-DEOB-PID and NNA-DEOB-T1FPID, the control strategy adopted can achieve fast-tracking control without overshoot in OER.
Table 4.
Intelligent algorithm control strategy control for OER (neural network).
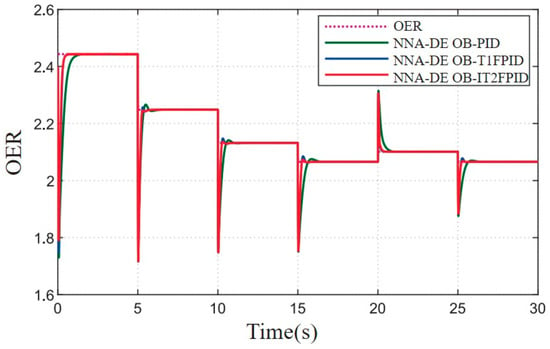
Figure 7.
OER tracking response curve for NNA-DE OB-IT2FPID, NNA-DE OB-PID, and NNA-DE OB-T1FPID when load current changes [63].
PEMFCs have a complex, nonlinear relationship. Compared with neural network control, deep learning intelligent algorithm control can automatically learn the complex nonlinear relationship. It can extract high-order abstract features, effectively reducing feature selection complexity, stabilize the tracking control of OER, and effectively reduce control system design complexity. Li et al., respectively, adopted the integrated imitation learning multi-skill depth deterministic strategy gradient (EILMMA-DDPG) intelligent algorithm [64], multi-agent dual-delay deep deterministic policy gradient (MET-MADDPG) intelligent algorithm based on virtual reality [65], and the evolutionary course simulation of large-scale multi-agent deep reinforcement learning (ECILS-MADDPG) intelligent algorithm [66] to control OER. Through the addition of the deep reinforcement learning algorithm in a multi-agent environment, the control system can carry out the cooperative control of PEMFC subsystems, such as HDS, ADS, and the cooling system, and the fast and stable control of OER can be realized. Among them, the ECILS-MADDPG intelligent algorithm is based on the concept of the virtual world, uses different virtual worlds in the process of pre-learning, and combines imitation learning and course learning so that agents in different combinations can be fully trained in different environments so as to enhance the control system’s robustness. As shown in Table 5, compared to the fuzzy PID algorithm’s control and MET-MADDPG algorithm control, the stabilization time and rise time of the OER control with the ECILS-MADDPG intelligent algorithm are significantly shorter, and the control performance is relatively the best. Furthermore, a traditional control is used to ensure stability in the known part, deep learning is used for adaptive learning in the unknown part, and the intelligent algorithm of deep learning is combined with the traditional control strategy, which can further enhance the OER control speed and accuracy and the PEMFC system’s output performance.
Table 5.
Intelligent algorithm control strategy control of OER (deep reinforcement learning).
The combination of deep reinforcement learning (DDPG) with type-2 fuzzy PI (SIT2FPI) control [67] and model predictive control [68] has an effect on OER control, but the control system’s accuracy, anti-disturbance ability, and robustness need to be enhanced. Therefore, Li et al. combined the deep reinforcement learning algorithm (MADDPG) of a multi-agent environment with adaptive proportional integral (API) control [69], fractional order proportional integral differential (FOPID) control [70], data-driven active fault-tolerant control (DD-AFTC) [71] and active fault-tolerant-coordinated control (AFTCC) [72]. Figure 8 shows the general control flow of the control system, and the traditional controller parameters are optimized by the agent’s deep reinforcement learning algorithm to enhance the control system’s performance. As shown in Table 6, the addition of active fault-tolerant control can effectively enhance the control system’s accuracy and robustness.
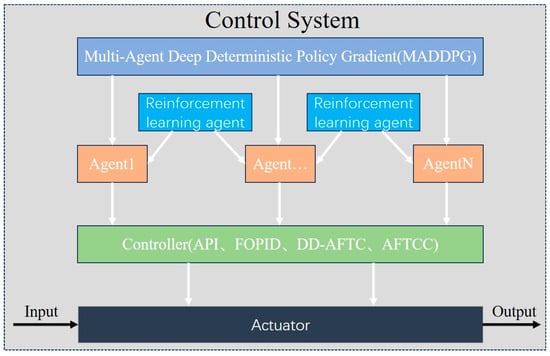
Figure 8.
Control system Block diagram of MADDPG combined with traditional control strategy.
Table 6.
Intelligent algorithm control strategy control for OER (deep reinforcement learning combined with traditional control).
In general, the intelligent algorithm control strategy’s strong adaptive ability, learning ability, and processing ability are superior measures to solve the high complexity of the control system and the difficulty of parameter adjustment, as well as effectively enhancing the PEMFC system’s efficiency and robustness. Compared with single control and hybrid control, the addition of intelligent algorithms reduces the difficulty of the control system design. However, the use of optimization algorithms, neural networks, and deep learning alone may lead to poor system stability. Therefore, the combination of traditional controls can effectively enhance the control system’s stability and robustness. An adaptive control strategy, auto-disturbance rejection control strategy, and active fault-tolerant control strategy have high control precision, strong robustness, and strong disturbance suppression ability. Nonetheless, further research needs to be conducted to fully exploit the potential benefits of deep learning algorithms in PEMFC systems. For example, more research is needed on the effectiveness of deep learning algorithmic control strategies to control multiple parameters in PEMFC control systems. At the same time, the intelligent algorithm control strategy is the focus of future research on how the PEMFC control system can operate reasonably, stably, and efficiently.
2.2. Pressure Control of ADS
In addition to OER, air supply pressure is also a key parameter in the PEMFC ADS. When the load changes or there are disturbances, accurate control of the cathode air supply pressure can control the pressure difference between the anode side and cathode side of the PEMFC stack within a reasonable range, which can effectively ensure the integrity of the proton exchange membrane and improve the PEMFC system’s service life, efficiency, and robustness [73,74].
Li et al. [75] adopted a proportional-integral (PI) controller based on the feedforward channel to control air supply pressure. The design, as well as the realization of the control system, are relatively simple, but the response and adjustment speed are not fast enough for a complex nonlinear PEMFC system. If nonlinear control based on feedback linearization is adopted, and the nonlinear system is linearized by Lie algebra technology [76,77], the fast and stable control of gas supply pressure can be realized, but it is highly dependent on the model accuracy. However, the model adaptive control can adapt to the change in system parameters and update the model parameters according to the control period to realize the accurate control of gas supply pressure [78]. Trinh et al. [79] adopted a super-twisted sliding mode control (STSMC) based on an adaptive neuro-fuzzy inference system (ANFIS). As shown in Figure 9, the error, the integral of the error, and the derivative of the error are the inputs of the ANFIS. The corresponding output is sent to the actuator to realize the ADS’s accurate supply pressure control. In addition to the control strategy, Vu et al. [80] effectively controlled the air supply pressure and alleviated the air compressor surge by installing a multi-function, four-way valve on the oxygen transport pipeline.
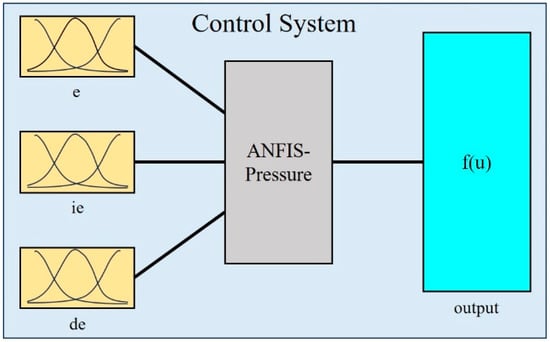
Figure 9.
ANFIS control strategy structure block diagram.
The coupling of OER and pressure in the ADS makes it difficult to achieve accurate, independent OER and pressure control, which can be effectively solved by using the decoupling strategies and realizing the high-precision independent control of OER and pressure [81,82]. In recent years, scholars have explored decoupling control strategies, including feedforward combined with internal model decoupling control strategy [83], dynamic fuzzy logic control (FLC) strategy [84], decoupled double closed-loop fuzzy PID control strategy based on feedforward compensation [85], double closed-loop PID control combined with fuzzy neural network decoupling control strategy [86], and a cascade decoupling control strategy based on sliding mode (SM) controller coupled with fuzzy extended state observer [87]. According to the study, adding fuzzy control strategies, feed-forward control strategies, and sliding mode control strategies to decoupled control systems can effectively reduce the complexity of control system design, enhance accuracy and robustness, and ensure that the OER and pressure stably track control independently when the load changes quickly. Compared with PID control, its control strategy has better overall performance.
Overall, the performance of the air supply pressure and OER pressure decoupling control strategies of the ADS are good. However, the control strategy is mainly based on the traditional control. In recent years, intelligent algorithm control has achieved significant results. Many scholars have proven through research that it is superior in terms of design difficulty and control performance. Therefore, it is important to consider switching to intelligent algorithm control for ADS control. It enhances control performance while reducing design difficulties. Therefore, in the future, the research direction needs to be considered as a decoupled control strategy based on the intelligent algorithm control strategy. It can achieve a more accurate, independent control of OER and pressure. This can bring cost savings and energy efficiency to the system.
2.3. Optimization of ADS
Aside from the accurate OER and pressure control, which is conducive to enhancing the PEMFC system’s output efficiency and extending its service life when air flows through the cathode by adopting optimization strategies that can enhance the PEMFC system’s overall performance, the flow field and flow channel’s design can be improved [88,89,90].
The pressure difference between the anode side and cathode side of the PEMFC stack during the air supply process leads to uneven air distribution on the cathode’s side of the PEMFC stack. The uniformity of velocity distribution in the process of air transport can be improved by optimizing flow fields and flow channels. Recently, scholars have optimized or designed flow fields and flow channels, including three-dimensional (3D) bionic flow fields [91], conical flow fields [92], 3D fine grid flow fields [93], 3D torsional parallel flow fields [94], improved Z-shaped flow fields [95], five-channel serpentine flow fields [96], parallel-serpentine-parallel flow channels [97], planthopper tooth-shaped flow channels (GFCH) [98], traveling wave flow channels [99], and so on. As shown in Table 7, according to the research results, compared with the traditional parallel and serpentine flow fields and channels, these new flow fields and channels have better performance; in contrast, the five-channel serpentine flow field, GFCH, and traveling wave flow channel are superior in improving air transmission speed, distribution uniformity, and water removal.
Table 7.
Optimization strategy of air flow transmission.
In addition, some scholars have adopted a new type of cathode spiral baffle [100], spoiler [101], and an improved gas diffusion layer(GDL) [102,103]. In the gas diffusion layer (GDL) and the microporous layer (MPL), add an appropriate amount of polytetrafluoroethylene [104], designed and prepared a new flow field bipolar plate [105], integrated porous bipolar plate (BP)-GDL [106], and other optimization strategies to improve the uniformity of air distribution on the cathode side. Among them, the spiral baffle also has excellent two-way gas supply capacity, and the integrated BP-GDL uses metal foam instead of carbon paper in GDL, which can reduce mass transfer and electron conduction resistance.
Overall, the use of optimization strategies in the ADS, such as the improvement and design of flow field channels, can be conducive to improving the air transmission speed as well as the distribution uniformity, and the method of an “integrated system” within the cathode has also achieved good results. But the method is still in the simulation stage. Further research is needed to see if the system performs well in real life. Additionally, more testing is needed to determine the efficiency of the system in different operating modes. Finally, the system needs to be tested in the field to verify its actual performance.
3. HDS
The HDS is also an important PEMFC subsystem. The common system structure for the HDS is shown in Figure 10. The storage tanks release hydrogen, which then passes through a pressure-reducing valve into the ejector and finally into the PEMFC stack for reaction. The discharge from the anode outlet is dehydrated through the gas–water separator to provide a secondary flow to the ejector for hydrogen recycling. Finally, excess waste gas is discharged through an exhaust valve [107]. The HDS controls the hydrogen utilization rate, the hydrogen supply flow rate, and the supply pressure. This is performed by adjusting the ejector primary flow rate, the ejector secondary flow rate, as well as the exhaust valve. It is very critical to improve the PEMFC system’s overall performance [108].

Figure 10.
Structure diagram of PEMFCs for HDS.
3.1. Hydrogen Recirculation Control of HDS
The air supply is “free” from the environment and is unlimited, so there is no need to consider the utilization rate. However, the hydrogen is supplied through the hydrogen storage tank, so a recirculation device is required to improve the hydrogen utilization rate during the PEMFC system operation [109,110]. The most common recirculation devices are pumps and ejectors. Because the ejector has the advantages of a simple structure, no external energy input, and low maintenance costs, it becomes a better choice that improves the hydrogen utilization rate in the recirculation system [111]. Kuo et al. [112] adopted the passive Venturi ejector to supply hydrogen, which can effectively enhance the hydrogen utilization rate and the PEMFC system’s performance. The ejector structure is shown in Figure 11. By controlling the ejector mixing chamber diameter (Dm) and throat diameter (Dt) [113,114] and the ratio of Dm to Dt [115,116], which can effectively increase the hydrogen circulation ratio, it is generally believed that the PEMFC system can work normally when the hydrogen excess ratio (HER) is controlled within the limits of 1.5–3. However, the experimental studies of Liu et al. [117] showed that PEMFCs can still operate stably when the HER is 1.05, which provides data support for research on the control system of hydrogen supply. In addition to controlling the ejector, Lee et al. [118] could control the gas supply mode by installing two valves in the circulation pipeline, which also improved the hydrogen efficiency. Nikiforow et al. [119] adopted an ejector based on three solenoid valves, which control the on–off of the three solenoid valves, thus controlling the ejector hydrogen flow rate. Yin et al. [120] and Le et al. [121] adopted a double-nozzle ejector, which makes the ejector have high efficiency and a wide adjustment range. Liu et al. [122] proposed a 3D printing technology to develop PEMFCs suitable for 1 KW. Setting the Dt of the ejector makes the PEMFCs better at using hydrogen and running the system efficiently than regular commercial injectors. This makes designing the circulation system much easier.
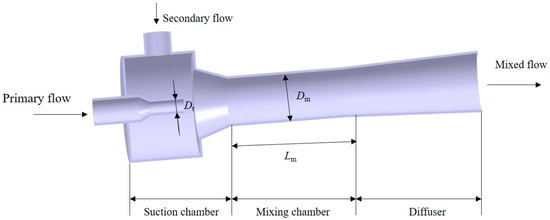
Figure 11.
Ejector structure diagram.
During the operation of the PEMFC system, nitrogen does not participate in the hydroxide chemical reaction but also flows to the anode of the stack due to the concentration difference and accumulates at the anode of the stack. To prevent nitrogen from entering the ejector through the circulation pipeline, it is significant to open the valve to purge nitrogen, but it causes hydrogen loss at the same time, so it is necessary to adopt purge control strategies to enhance the hydrogen utilization rate [123,124]. Some scholars use a fixed cycle to control the on–off of the valve to realize purging [125,126,127], but when PEMFC is at a high load, it is easy to lead to nitrogen and water accumulation; at low load, excessive hydrogen loss takes place with ease. To overcome this problem, Fan et al. [128] and Wang et al. [129] used the output voltage drop of the PEMFC stack as the trigger condition to control the purge time, while Liu et al. [130] used 25% nitrogen concentration as the trigger condition to control the purge time. The study’s findings demonstrate that their control strategies can better adapt to the PEMFC system’s operation and have excellent performance in improving hydrogen efficiency and PEMFC system efficiency.
Overall, ejector control and purge control in a hydrogen delivery system can effectively improve hydrogen utilization. This is especially true since 3D-printed ejectors can achieve “personalized” requirements to improve ejector performance. This also further promotes the development of small UAVs based on PEMFCs. Compared with fixed-cycle control purges, the purge control strategies based on voltage or nitrogen concentration are better.
3.2. Hydrogen Flow Control for HDS
In addition to controlling hydrogen utilization, in recent years, scholars have adopted control strategies in hydrogen delivery systems to control hydrogen supply flow. This has improved the response speed of PEMFC systems. Nikiforow et al. [131] adopted fixed geometry-ejector and discrete controls, which can effectively supply hydrogen flow to meet the power demand when the load changes, but they are prone to delay. The observer-based output feedback control can regulate the hydrogen supply flow in time according to the error [132,133], but the control system’s anti-disturbance ability is not strong. The model predictive control strategy [108,130] can automatically regulate the parameters of the control system by predicting the coming disturbance of the system so as to enhance the control system’s robustness and control accuracy, but this strategy requires the high model accuracy of the system. To achieve fast and stable hydrogen flow control, Kuo et al. [134] used fuzzy PI control, for which expert judgment is required to determine the fuzzy rules. Cheng et al. [135] adopted a fuzzy control based on whale optimization, which, through the system inputs and outputs, optimizes the parameters of fuzzy rules, making the control system simple to implement and superior in performance.
In general, the hydrogen supply flow control strategies in the HDS are superior. However, there is little research on control strategies, and they are mainly traditional controls. In recent years, intelligent algorithm control has achieved significant results. It has been proven to be better than traditional control in terms of control system design difficulty and control performance. Intelligent algorithm control is a promising option for hydrogen delivery systems, as it can reduce the complexity of control systems and improve control performance. Further research into this type of control is needed to better understand its benefits.
3.3. Pressure Control of HDS
Since the pressure response speed of the HDS is faster than that of the ADS, it is necessary to accurately control the gas supply pressure of the HDS to keep the pressure difference between the anode side and cathode side of the PEMFC stack within a reasonable range and to protect the proton exchange membrane to prolong the service life of the PEMFC [136,137]. Simple PI control [138] and fuzzy control [139] can quickly and stably adjust the hydrogen supply pressure, but there is under-adjustment when the stack current increases and overshoot occurs when the stack current decreases.
The use of the hybrid control strategy can combine the advantages of multiple control strategies, overcome the shortcomings of a single control strategy, and improve overall control performance. Combining feedforward control with feedback control [140], proportional integral control [141], and fuzzy PI control [142], the problem of under-adjustment and overshoot can be effectively solved using the compensation effect of feedforward control. The second-order fuzzy auto-disturbance rejection controller (SOFADRC) makes it easier for the control system to handle disturbances [143]. As shown in Figure 12, SOFADRC has better performance in reducing overshoot, oscillation, and pressure response lag. To adapt to the PEMFC system’s anode internal complexity and enhance the control system’s robustness, the model predictive control can be combined with a nonlinear predictive control [144], robust predictive control [145], and feedback linearization control [146], and the control system parameters can be automatically regulated by the disturbance of the model predictive control system to enhance the control system’s control accuracy and control robustness. The hydrogen supply pressure control with high speed and small overshoot can also be realized so that the pressure difference between the anode side and cathode side of the PEMFC stack is always kept within reasonable limits.
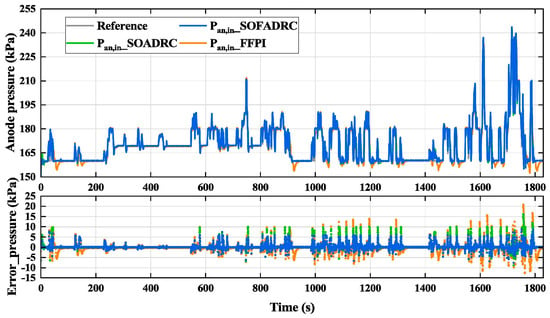
Figure 12.
Simulation results of anode pressure tracking ability of different controllers [143].
Although the hybrid control system performance is superior, the control system design is a bit difficult. To achieve the control system’s superior performance, while reducing design difficulty, scholars used iterative learning control to control the hydrogen supply pressure [147,148]. With iterative learning control, the accuracy of the system model does not need to be very high; only the use of data iteration can achieve parameter optimization. Based on the research results, iterative learning control is capable of regulating the hydrogen supply pressure stably, while being robust and ensuring anti-disturbance. Deng et al. [149] adopted optimal hybrid controllers based on the nonlinear PID (NPID) algorithm and the ASOSM algorithm. Compared with the NPID control strategy and the NMIMO control strategy, under the control of NPID+ASOSM, hydrogen supply pressure can be adjusted quickly and accurately, and the PEMFC stack has a more stable output voltage.
Overall, the performance of hydrogen supply pressure control strategies in the HDS is superior, as shown in Table 8. The fluctuation of hydrogen supply pressure in the active disturbance rejection control, as well as model predictive control, is small, and the control system’s anti-disturbance ability and robustness are favorable. Still, the related research on control strategies is limited and mainly based on traditional control.
Table 8.
Control of gas supply pressure in hydrogen delivery system.
4. Summary and Future Development Trend
4.1. Summary
The ADS and HDS are important components of the PEMFC system, and effective management of the ADS and HDS plays an important role in improving the performance of the PEMFC system. This paper reviews the control strategies and optimization strategies for the hydrogen and oxygen supply flow rate and supply pressure of the PEMFC system in recent years.
ADS: OER and pressure, as the two most critical parameters, are also the two key parameters that affect the performance of the PEMFC system. Single control strategies, such as the adaptive control strategy and active disturbance rejection control strategy, are easy to implement, and their effects are better than those of the control strategies of traditional PID and fuzzy PID, but it is difficult to balance control accuracy and system anti-interference ability. To meet the requirements for well flow and pressure control, the problem of poor performance in a single control system can be overcome using hybrid control such as PID control and other controls, sliding mode control and other controls, and the further adoption of intelligent optimization algorithms, neural networks, deep learning, and other controls. This can improve control system performance and reduce control system design difficulties. The flow field or channel used for oxygen supply is optimized to improve oxygen supply speed and distribution uniformity, improving overall system performance in comparison with conventional parallel or serpentine channels.
HDS: Flow and pressure are two of the most critical parameters in the HDS. Also, to meet the requirements for well flow and pressure control, hydrogen cycle control strategies, purge strategies, and hydrogen flow control strategies are used to greatly improve the hydrogen utilization rate. To realize the accurate control of pressure, fuzzy control, model predictive control, and related hybrid control strategies are applied, which are more accurate and robust than the traditional PID control. Furthermore, the iterative learning control and sliding mode algorithm control can satisfy the control system’s performance while reducing the control system’s design difficulty. However, in general, there is little research on control strategies for flow rate and pressure in the HDS.
4.2. Future Development Trend
The ADS is an important PEMFC subsystem. The future development trends of oxygen delivery flow control, pressure control, and oxygen distribution optimization in the process of conveying oxygen to the cathodic reaction zone are as follows:
- Intelligent algorithms are combined with traditional control strategies, such as the adaptive control strategy, active disturbance rejection control strategy, and active fault-tolerant control strategy. To control OER and pressure so that the control system can adapt to real-time operating conditions and environmental changes, highly precise control of OER and pressure can be achieved.
- During the actual PEMFC operation, there is a need to develop a more adaptable decoupling control strategy for OER and pressure that can realize the independent and precise control of OER and pressure.
- By optimizing the cathode channel structure, oxygen transport, and distribution are improved, and the concentration polarization of oxygen, as well as the oxygen transport pressure drop, are reduced.
- More efficient gas treatment technologies, such as membrane separation and adsorption, are used to improve the purity and quality of oxygen to remove impurities and moisture and avoid damage to PEMFCs.
- Integration of the OER control system, pressure control system, and humidity control system can reduce the control system design difficulty while improving its overall performance.
- Emphasis should be placed on the application of intelligent control algorithm strategies to the vehicle PEMFCs so that even in the face of complex working conditions, the vehicle can achieve stable, accurate, and efficient operation.
The HDS is also an important PEMFC subsystem. In the process of transporting hydrogen to the anode reaction zone, the future development trends in hydrogen flow control and pressure control are as follows:
- Improvement in the ejector structure and control can meet the needs of high-power and large PEMFC systems.
- The use of a “3D print ejector” can meet the “personalized needs” of PEMFCs, which makes the ejector perform adequately in different working ranges of PEMFCs.
- The intelligent algorithm, combined with the traditional control strategy, is applied to hydrogen supply and purging to realize high-precision hydrogen supply control and improve hydrogen utilization rates. This also promotes the further development of the on-board PEMFC industry.
- There is a focus on controlling and solving hydrogen leakage problems and reducing the risk of hydrogen leakage by improving gas-tight design and hydrogen leakage detection techniques.
- The pressure control strategy adopted requires balancing the difference in cathode and anode pressure response speeds, rapid pressure adjustment for load changes, and precise control of the pressure difference between the anode and cathode.
Author Contributions
L.C.: data curation, visualization, writing—original draft; Z.W.: conceptualization, methodology, formal analysis, investigation, writing—original draft; J.M.: data curation, writing—original draft; Y.G.: methodology, writing—original draft; D.W.: software, writing—original draft; P.Z.: methodology, software; J.L.: formal analysis, investigation. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Zhejiang Provincial Natural Science Foundation of China (LY22E050015) and Fundamental Research Funds for the Provincial Universities of Zhejiang (2023YW88).
Data Availability Statement
Data will be made available on request.
Conflicts of Interest
Author Jian Liu was employed by the Zhejiang Hangke Technology Incorporated Company. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest. The Zhejiang Hangke Technology Incorporated Company had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Abbreviations
| ACKF | adaptive cubic Kalman filter |
| ADRC | active disturbance rejection control |
| AFTCC | active fault-tolerant coordinated control |
| ANFIS | adaptive neuro-fuzzy inference system |
| APC | adaptive robust control |
| ADS | air delivery system |
| ASOSM | adaptive second-order sliding mode |
| ASTW | adaptive super-twisting |
| AUKF | adaptive unscented Kalman filter |
| BP | bipolar plate |
| CASCADED-AITSMCTDE | cascade adaptive integral terminal sliding mode controller combined with a time delay estimation |
| DD-AFTC | data-driven active fault tolerant control |
| DDPG | deep deterministic policy gradient |
| ECILS | evolutionary curriculum imitation large-scale |
| EILMMA | ensemble imitation learning multi-trick algorithm |
| ESO | extended state observer |
| FF | feedforward |
| FLC | fuzzy logic control |
| FOPID | fractional order proportional integral differential |
| FM-MPC | fused multi-model predictive controller |
| FSTPID | fuzzy self-tuning proportional integral differential |
| GDL | gas diffusion layer |
| HIL | hardware-in-the-loop |
| HDS | hydrogen delivery system |
| IOPID | integer order proportional integral differential |
| IT2F | interval type-2 fuzzy |
| ITSMC | integral terminal sliding mode controller |
| MADDPG | multi-agent deep deterministic policy gradient |
| MRAC | model reference adaptive control |
| MATD3 | multi-agent twin delayed deep deterministic policy gradient |
| MPC | model predictive control |
| MPL | microporous layer |
| MRA-PD | model reference adaptive proportional differential |
| NMIMO | nonlinear multiple input multiple output |
| NNA-DE | neural network algorithm differential evolution |
| OER | oxygen excess ratio |
| PEMFC | proton exchange membrane fuel cell |
| PID | proportional integral differential |
| PI-FC | proportional integral feedback control |
| RBF | radial basis function |
| SOSMC | second order sliding mode control |
| SMC | sliding mode control |
| STSMC | super-twisted sliding mode control |
| T2-FLS | type-2 fuzzy logic system |
| TDE | time delay estimation |
| TS_SM | two-stage sliding mode |
References
- Cheng, C.; Wang, S.; Wu, Y.; Bello, I.T.; Dai, Y.; Cheng, R.; Zhai, S.; Wang, Y.; Feng, S.-P.; Ni, M. Thermally regenerative CO2-induced pH-gradient cell for waste-to-energy conversion. ACS Energy Lett. 2021, 6, 3221–3227. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, C.; Wan, Z.; Chen, X.; Chan, S.H.; Tu, Z. Progress and perspectives of integrated thermal management systems in PEM fuel cell vehicles: A review. Renew. Sustain. Energy Rev. 2022, 155, 111908. [Google Scholar] [CrossRef]
- Korth, M.; Balducci, A.J.C. Preface to special issue of ChemSusChem on interfacing experiment and theory in the development of energy storage and devices. ChemSusChem 2018, 11, 1890–1891. [Google Scholar] [CrossRef] [PubMed]
- Hao, H.; Mu, Z.; Liu, Z.; Zhao, F.J.F.i.E. Abating transport GHG emissions by hydrogen fuel cell vehicles: Chances for the developing world. Front. Energy 2018, 12, 466–480. [Google Scholar] [CrossRef]
- Wang, Y.; Diaz, D.F.R.; Chen, K.S.; Wang, Z.; Adroher, X.C. Materials, technological status, and fundamentals of PEM fuel cells–a review. Mater. Today 2020, 32, 178–203. [Google Scholar] [CrossRef]
- Mitra, U.; Arya, A.; Gupta, S. A comprehensive and comparative review on parameter estimation methods for modelling proton exchange membrane fuel cell. Fuel 2023, 335, 127080. [Google Scholar] [CrossRef]
- Ozdemir, S.N.; Taymaz, I.; Okumuş, E.; San, F.G.B.; Akgün, F. Experimental investigation on performance evaluation of PEM electrolysis cell by using a Taguchi method. Fuel 2023, 344, 128021. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, Y.; Liu, G.; Yang, Q.; Li, L.; Gao, Z.J.I.J.o.G.E. Air and hydrogen supply systems and equipment for PEM fuel cells: A review. Int. J. Green Energy 2022, 19, 331–348. [Google Scholar] [CrossRef]
- Li, Y.; Pei, P.; Ma, Z.; Ren, P.; Huang, H.J.R.; Reviews, S.E. Analysis of air compression, progress of compressor and control for optimal energy efficiency in proton exchange membrane fuel cell. Renew. Sustain. Energy Rev. 2020, 133, 110304. [Google Scholar] [CrossRef]
- Yang, B.; Li, J.; Li, Y.; Guo, Z.; Zeng, K.; Shu, H.; Cao, P.; Ren, Y. A critical survey of proton exchange membrane fuel cell system control: Summaries, advances, and perspectives. Int. J. Hydrogen Energy 2022, 47, 9986–10020. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Sun, Z.; Chen, Z. A systematic review of system modeling and control strategy of proton exchange membrane fuel cell. Energy Rev. 2023, 3, 100054. [Google Scholar] [CrossRef]
- Li, J.; Yu, T. Intelligent controller based on distributed deep reinforcement learning for PEMFC air supply system. IEEE Access 2021, 9, 7496–7507. [Google Scholar] [CrossRef]
- Li, J.; Yu, T. Sensors integrated control of PEMFC gas supply system based on large-scale deep reinforcement learning. Sensors 2021, 21, 349. [Google Scholar] [CrossRef]
- Li, J.; Yu, T.; Yang, B. Adaptive controller of PEMFC output voltage based on ambient intelligence large-scale deep reinforcement learning. IEEE Access 2021, 9, 6063–6075. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.; Yu, T. Temperature control of proton exchange membrane fuel cell based on machine learning. Front. Energy Res. 2021, 9, 763099. [Google Scholar] [CrossRef]
- Ge, X.; Li, K.; Tian, W.; Wang, R.; Wan, X.; Tang, H. Efficiency improvement strategy of fuel cell system based on oxygen excess ratio and cathode pressure two-dimensional optimization. Int. J. Hydrogen Energy 2024, 57, 136–147. [Google Scholar] [CrossRef]
- Deng, Z.; Chen, Q.; Zhang, L.; Zhou, K.; Zong, Y.; Fu, Z.; Liu, H. Data-driven reconstruction of interpretable model for air supply system of proton exchange membrane fuel cell. Appl. Energy 2021, 299, 117266. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Z.; Ye, X.; Yi, L.; Xu, S.; Zhang, T. Air flow and pressure optimization for air supply in proton exchange membrane fuel cell system. Energy 2022, 238, 121949. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, J.; Chen, H.; Yan, C. Air supply regulation for PEMFC systems based on uncertainty and disturbance estimation. Int. J. Hydrogen Energy 2018, 43, 11559–11567. [Google Scholar] [CrossRef]
- Wang, J.; Han, Y.; Pan, S.; Wang, Z.; Cui, D.; Geng, M. Design and development of an oil-free double-scroll air compressor used in a PEM fuel cell system. Renew. Energy 2022, 199, 840–851. [Google Scholar] [CrossRef]
- Gao, J.; Li, M.; Hu, Y.; Chen, H.; Ma, Y. Challenges and developments of automotive fuel cell hybrid power system and control. Sci. China Inf. Sci. 2019, 62, 1–25. [Google Scholar] [CrossRef]
- Hou, J.; Yang, M.; Ke, C.; Zhang, J. Control logics and strategies for air supply in PEM fuel cell engines. Appl. Energy 2020, 269, 115059. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Z.; Wang, F.; Ouyang, Q.; Su, H. Optimal oxygen excess ratio control for PEM fuel cells. IEEE Trans. Control Syst. Technol. 2017, 26, 1711–1721. [Google Scholar] [CrossRef]
- Zhao, D.; Xu, L.; Huangfu, Y.; Dou, M.; Liu, J. Semi-physical modeling and control of a centrifugal compressor for the air feeding of a PEM fuel cell. Energy Convers. Manag. 2017, 154, 380–386. [Google Scholar] [CrossRef]
- Linli, W.; Zhangyi, S.; Mousavi, H.; Gu, H. A novel robust reset controller implemented through field programmable gate array for oxygen ratio regulation of proton exchange membrane fuel cell. Comput. Electr. Eng. 2022, 99, 107788. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, H.; Gong, X.; Yu, S.; Gao, J.; Chen, H. Control-oriented modeling and robust nonlinear triple-step controller design for an air-feed system for polymer electrolyte membrane fuel cells. Asian J. Control 2019, 21, 1811–1823. [Google Scholar] [CrossRef]
- Wang, Y.; Li, M.; Gao, J.; Chu, H.; Chen, H. Fault-tolerant control through dynamic surface triple-step approach for proton exchange membrane fuel cell air supply systems. Int. J. Hydrogen Energy 2022, 47, 1804–1819. [Google Scholar] [CrossRef]
- Sun, L.; Shen, J.; Hua, Q.; Lee, K.Y. Data-driven oxygen excess ratio control for proton exchange membrane fuel cell. Appl. Energy 2018, 231, 866–875. [Google Scholar] [CrossRef]
- Han, J.; Yu, S.; Yi, S. Adaptive control for robust air flow management in an automotive fuel cell system. Appl. Energy 2017, 190, 73–83. [Google Scholar] [CrossRef]
- Han, J.; Yu, S.; Yi, S. Oxygen excess ratio control for proton exchange membrane fuel cell using model reference adaptive control. Int. J. Hydrogen Energy 2019, 44, 18425–18437. [Google Scholar] [CrossRef]
- Ziane, M.A.; Pera, M.-C.; Join, C.; Benne, M.; Chabriat, J.-P.; Steiner, N.Y.; Damour, C. On-line implementation of model free controller for oxygen stoichiometry and pressure difference control of polymer electrolyte fuel cell. Int. J. Hydrogen Energy 2022, 47, 38311–38326. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, B.; Xu, S. Research on air mass flow-pressure combined control and dynamic performance of fuel cell system for vehicles application. Appl. Energy 2022, 309, 118446. [Google Scholar] [CrossRef]
- Sharma, S.; Babu, G.U.B. A new control strategy for a higher order proton exchange membrane fuel cell system. Int. J. Hydrogen Energy 2020, 45, 25945–25959. [Google Scholar] [CrossRef]
- Zhao, D.; Li, F.; Ma, R.; Zhao, G.; Huangfu, Y. An unknown input nonlinear observer based fractional order PID control of fuel cell air supply system. IEEE Trans. Ind. Appl. 2020, 56, 5523–5532. [Google Scholar] [CrossRef]
- Wang, Y.; Li, H.; Feng, H.; Han, K.; He, S.; Gao, M. Simulation study on the PEMFC oxygen starvation based on the coupling algorithm of model predictive control and PID. Energy Convers. Manag. 2021, 249, 114851. [Google Scholar] [CrossRef]
- Wu, D.; Li, K.; Gao, Y.; Yin, C.; Tang, H. Adaptive control of oxygen excess ratio in a proton exchange membrane fuel cell system. Energy Rep. 2022, 8, 328–335. [Google Scholar] [CrossRef]
- Xu, L.; Hu, J.; Cheng, S.; Fang, C.; Li, J.; Ouyang, M.; Lehnert, W. Robust control of internal states in a polymer electrolyte membrane fuel cell air-feed system by considering actuator properties. Int. J. Hydrogen Energy 2017, 42, 13171–13191. [Google Scholar] [CrossRef]
- Baroud, Z.; Benmiloud, M.; Benalia, A.; Ocampo-Martinez, C. Novel hybrid fuzzy-PID control scheme for air supply in PEM fuel-cell-based systems. Int. J. Hydrogen Energy 2017, 42, 10435–10447. [Google Scholar] [CrossRef]
- Yang, D.; Pan, R.; Wang, Y.; Chen, Z. Modeling and control of PEMFC air supply system based on TS fuzzy theory and predictive control. Energy 2019, 188, 116078. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Y.; Wang, D.; Wang, Y. Adaptive robust control of oxygen excess ratio for PEMFC system based on type-2 fuzzy logic system. Inf. Sci. 2020, 511, 1–17. [Google Scholar] [CrossRef]
- Sankar, K.; Jana, A.K. Nonlinear multivariable sliding mode control of a reversible PEM fuel cell integrated system. Energy Convers. Manag. 2018, 171, 541–565. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, F.; Gao, J.; Chen, H.; Shen, T. Oxygen excess ratio control of PEM fuel cells using observer-based nonlinear triple-step controller. Int. J. Hydrogen Energy 2020, 45, 29705–29717. [Google Scholar] [CrossRef]
- Ma, L.; Zhao, H.; Qu, Y.; Zhao, S.; Yu, Y.; Wei, W. Reduced-order active disturbance rejection control method for PEMFC air intake system based on the estimation of oxygen excess ratio. IET Renew. Power Gener. 2023, 17, 951–963. [Google Scholar] [CrossRef]
- Deng, H.; Li, Q.; Cui, Y.; Zhu, Y.; Chen, W. Nonlinear controller design based on cascade adaptive sliding mode control for PEM fuel cell air supply systems. Int. J. Hydrogen Energy 2019, 44, 19357–19369. [Google Scholar] [CrossRef]
- Hu, H.; Ou, K.; Yuan, W.-W. Fused multi-model predictive control with adaptive compensation for proton exchange membrane fuel cell air supply system. Energy 2023, 284, 128459. [Google Scholar] [CrossRef]
- Li, Q.; Yin, L.; Yang, H.; Wang, T.; Qiu, Y.; Chen, W. Multiobjective optimization and data-driven constraint adaptive predictive control for efficient and stable operation of PEMFC system. IEEE Trans. Ind. Electron. 2020, 68, 12418–12429. [Google Scholar] [CrossRef]
- Abbaker AM, O.; Wang, H.; Tian, Y. Adaptive integral type-terminal sliding mode control for PEMFC air supply system using time delay estimation algorithm. Asian J. Control 2022, 24, 217–226. [Google Scholar] [CrossRef]
- Liu, B.; Lu, W. Surrogate models in machine learning for computational stochastic multi-scale modelling in composite materials design. Int. J. Hydromechatron. 2022, 5, 336–365. [Google Scholar] [CrossRef]
- Sun, L.; Jin, Y.; Pan, L.; Shen, J.; Lee, K.Y. Efficiency analysis and control of a grid-connected PEM fuel cell in distributed generation. Energy Convers. Manag. 2019, 195, 587–596. [Google Scholar] [CrossRef]
- Polak, A. Simulation of Fuzzy control of oxygen flow in PEM fuel cells. Energies 2020, 13, 2372. [Google Scholar] [CrossRef]
- Ouyang, Q.; Chen, J.; Wang, F.; Su, H. Nonlinear MPC controller design for AIR supply of PEM fuel cell based power systems. Asian J. Control 2017, 19, 929–940. [Google Scholar] [CrossRef]
- Chen, J.; He, H. Improve hydrogen economy for vehicular fuel cell system via investigation and control of optimal operating oxygen excess ratio. Energy Rep. 2022, 8, 5883–5897. [Google Scholar] [CrossRef]
- Liu, J.; Gao, Y.; Su, X.; Wack, M.; Wu, L. Disturbance-observer-based control for air management of PEM fuel cell systems via sliding mode technique. IEEE Trans. Control Syst. Technol. 2018, 27, 1129–1138. [Google Scholar] [CrossRef]
- Zakaria, B.; Noureddine, G.; Atallah, B.; Carlos, O.M. Algebraic observer-based output-feedback controller design for a PEM fuel cell air-supply subsystem. IET Renew. Power Gener. 2018, 12, 1714–1721. [Google Scholar] [CrossRef]
- Yin, X.; Wang, X.; Wang, L.; Qin, B.; Liu, H.; Jia, L.; Cai, W. Cooperative control of air and fuel feeding for PEM fuel cell with ejector-driven recirculation. Appl. Therm. Eng. 2021, 199, 117590. [Google Scholar] [CrossRef]
- Deng, H.; Li, Q.; Chen, W.; Zhang, G. High-order sliding mode observer based OER control for PEM fuel cell air-feed system. IEEE Trans. Energy Convers. 2017, 33, 232–244. [Google Scholar] [CrossRef]
- Yuan, H.; Dai, H.; Wei, X.; Ming, P. A novel model-based internal state observer of a fuel cell system for electric vehicles using improved Kalman filter approach. Appl. Energy 2020, 268, 115009. [Google Scholar] [CrossRef]
- Yue, H.; He, H.; Han, M.; Gong, S.J.F. Active disturbance rejection control strategy for PEMFC oxygen excess ratio based on adaptive internal state estimation using unscented Kalman filter. Fuel 2024, 356, 129619. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Xu, J.; Chai, T. Observer-based discrete adaptive neural network control for automotive PEMFC air-feed subsystem. IEEE Trans. Veh. Technol. 2021, 70, 3149–3163. [Google Scholar] [CrossRef]
- Wang, Y.-L.; Wang, Y.-F.; Zhang, H.-K. Robust adaptive control of PEMFC air supply system based on radical basis function neural network. J. Dyn. Syst. Meas. Control 2019, 141, 064503. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Chen, G. Robust composite adaptive neural network control for air management system of PEM fuel cell based on high-gain observer. Neural Comput. Appl. 2020, 32, 10229–10243. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y. Pressure and oxygen excess ratio control of PEMFC air management system based on neural network and prescribed performance. Eng. Appl. Artif. Intell. 2023, 121, 105850. [Google Scholar] [CrossRef]
- AbouOmar, M.S.; Su, Y.; Zhang, H.; Shi, B.; Wan, L. Observer-based interval type-2 fuzzy PID controller for PEMFC air feeding system using novel hybrid neural network algorithm-differential evolution optimizer. Alex. Eng. J. 2022, 61, 7353–7375. [Google Scholar] [CrossRef]
- Li, J.; Yu, T.; Yang, B. Coordinated control of gas supply system in PEMFC based on multi-agent deep reinforcement learning. Int. J. Hydrogen Energy 2021, 46, 33899–33914. [Google Scholar] [CrossRef]
- Li, J.; Yang, B.; Yu, T. Distributed deep reinforcement learning-based coordination performance optimization method for proton exchange membrane fuel cell system. Sustain. Energy Technol. Assess. 2022, 50, 101814. [Google Scholar] [CrossRef]
- Li, J.; Yu, T. Large-scale multi-agent deep reinforcement learning-based coordination strategy for energy optimization and control of proton exchange membrane fuel cell. Sustain. Energy Technol. Assess. 2021, 48, 101568. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Boudjadar, J.; Khooban, M.-H. A new adaptive type-II fuzzy-based deep reinforcement learning control: Fuel cell air-feed sensors control. IEEE Sens. J. 2019, 19, 9081–9089. [Google Scholar] [CrossRef]
- Wang, X.; Chen, J.; Quan, S.; Wang, Y.-X.; He, H. Hierarchical model predictive control via deep learning vehicle speed predictions for oxygen stoichiometry regulation of fuel cells. Appl. Energy 2020, 276, 115460. [Google Scholar] [CrossRef]
- Li, J.; Yu, T. A new adaptive controller based on distributed deep reinforcement learning for PEMFC air supply system. Energy Rep. 2021, 7, 1267–1279. [Google Scholar] [CrossRef]
- Li, J.; Geng, J.; Yu, T. Multi-objective optimal control for proton exchange membrane fuel cell via large-scale deep reinforcement learning. Energy Rep. 2021, 7, 6422–6437. [Google Scholar] [CrossRef]
- Li, J.; Cheng, Y.; Yu, H.; Du, H.; Cui, H. Multi-agent deep meta-reinforcement learning-based active fault tolerant gas supply management system for proton exchange membrane fuel cells. eTransportation 2023, 18, 100282. [Google Scholar] [CrossRef]
- Li, J.; Zhou, T. Active fault-tolerant coordination energy management for a proton exchange membrane fuel cell using curriculum-based multiagent deep meta-reinforcement learning. Renew. Sustain. Energy Rev. 2023, 185, 113581. [Google Scholar] [CrossRef]
- Chen, B.; Cai, Y.; Shen, J.; Tu, Z.; Chan, S.H. Performance degradation of a proton exchange membrane fuel cell with dead-ended cathode and anode. Appl. Therm. Eng. 2018, 132, 80–86. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, N. Cuckoo search algorithm with explosion operator for modeling proton exchange membrane fuel cells. Int. J. Hydrogen Energy 2019, 44, 3075–3087. [Google Scholar] [CrossRef]
- Li, C.; Zhao, H.; Liu, H.; Jiang, W.; Ding, T.; Gao, B.; Gao, J.J.M. Gas supply control and experimental validation for polymer electrolyte membrane fuel cells. Mechatronics 2023, 91, 102958. [Google Scholar] [CrossRef]
- Na, W.; Gou, B.; Kim, J.; Mojica, F.; Chuang, P.-Y.A. Complementary cooperation dynamic characteristics analysis and modeling based on multiple-input multiple-output methodology combined with nonlinear control strategy for a polymer electrolyte membrane fuel cell. Renew. Energy 2020, 149, 273–286. [Google Scholar] [CrossRef]
- Li, M.; Yin, H.; Ding, T.; Zhao, J.; Gao, J.; Chen, H. Air flow rate and pressure control approach for the air supply subsystems in PEMFCs. ISA Trans. 2022, 128, 624–634. [Google Scholar] [CrossRef] [PubMed]
- Cruz Rojas, A.; Lopez Lopez, G.; Gomez-Aguilar, J.; Alvarado, V.M.; Sandoval Torres, C.L. Control of the air supply subsystem in a PEMFC with balance of plant simulation. Sustainability 2017, 9, 73. [Google Scholar] [CrossRef]
- Trinh, H.-A.; Ahn, K.K. Design and evaluation of adaptive neural fuzzy-based pressure control for PEM fuel cell system. Energy Rep. 2022, 8, 12026–12037. [Google Scholar]
- Vu, H.N.; Le Tri, D.T.; Nguyen, H.L.; Kim, Y.; Yu, S. Multifunctional bypass valve for water management and surge protection in a proton-exchange membrane fuel cell supply-air system. Energy 2023, 278, 127696. [Google Scholar] [CrossRef]
- Yang, Q.; Zhang, N.; Chen, S.; Xiao, G. Non-uniform design of proton exchange membrane fuel cell and its matching with operations. J. Clean. Prod. 2023, 428, 139382. [Google Scholar] [CrossRef]
- Bai, X.; Jian, Q. Decoupling strategy for react-air supply and cooling of open-cathode proton exchange membrane fuel cell stack considering real-time membrane resistance estimation. J. Clean. Prod. 2023, 410, 137288. [Google Scholar] [CrossRef]
- Sun, T.; Zhang, X.; Chen, B.; Liu, X. Coordination control strategy for the air management of heavy vehicle fuel cell engine. Int. J. Hydrogen Energy 2020, 45, 20360–20368. [Google Scholar] [CrossRef]
- Zhao, D.; Xia, L.; Dang, H.; Wu, Z.; Li, H. Design and control of air supply system for PEMFC UAV based on dynamic decoupling strategy. Energy Convers. Manag. 2022, 253, 115159. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, H.; Peng, L.; Ye, X.; Xu, S.; Zhang, T. Feedforward-decoupled closed-loop fuzzy proportion-integral-derivative control of air supply system of proton exchange membrane fuel cell. Energy 2022, 240, 122490. [Google Scholar] [CrossRef]
- Jia, Y.; Zhang, R.; Zhang, T.; Fan, Z. Coordinated Control of the Fuel Cell Air Supply System Based on Fuzzy Neural Network Decoupling. ACS Omega 2021, 6, 34438–34446. [Google Scholar] [CrossRef] [PubMed]
- Yuan, H.; Dai, H.; Ming, P.; Zhan, J.; Wang, X.; Wei, X. A fuzzy extend state observer-based cascade decoupling controller of air supply for vehicular fuel cell system. Energy Convers. Manag. 2021, 236, 114080. [Google Scholar] [CrossRef]
- Wan, Z.; Yan, H.; Sun, Y.; Yang, C.; Chen, X.; Kong, X.; Chen, Y.; Tu, Z.; Wang, X. Thermal management improvement of air-cooled proton exchange membrane fuel cell by using metal foam flow field. Appl. Energy 2023, 333, 120642. [Google Scholar] [CrossRef]
- Liu, M.; Huang, H.; Li, X.; Guo, X.; Wang, T.; Lei, H. Geometry optimization and performance analysis of a new tapered slope cathode flow field for PEMFC. Int. J. Hydrogen Energy 2021, 46, 37379–37392. [Google Scholar] [CrossRef]
- Son, J.; Um, S.; Kim, Y.-B. Relationship between number of turns of serpentine structure with metal foam flow field and polymer electrolyte membrane fuel cell performance. Renew. Energy 2022, 188, 372–383. [Google Scholar] [CrossRef]
- Xuan, L.; Wang, Y.; Mei, D.; Lan, J.J.E. Design and modelling of 3D bionic cathode flow field for proton exchange membrane fuel cell. Energies 2021, 14, 6044. [Google Scholar] [CrossRef]
- Lim, O. Numerical investigation of tapered flow field configuration to improve mass transport and performance of proton exchange membrane fuel cell. Int. J. Hydrogen Energy 2023, 50, 470–491. [Google Scholar]
- Sun, F.; Su, D.; Li, P.; Dong, X. A novel 3D fine-mesh flow field design and performance analysis for proton exchange membrane fuel cells. J. Power Sources 2023, 584, 233572. [Google Scholar] [CrossRef]
- Qi, W.; Tang, X.; Song, J.; Zhang, Z.; Huang, Z.; Ge, S.; Tuo, J.; Cheng, J.; Guo, S. Enhanced performance in proton exchange membrane fuel cell with the twisted parallel micro-channel for flow field. Int. J. Hydrogen Energy 2023, 48, 36512–36522. [Google Scholar] [CrossRef]
- Ashrafi, M.; Kanani, H.; Shams, M. Numerical and experimental study of two-phase flow uniformity in channels of parallel PEM fuel cells with modified Z-type flow-fields. Energy 2018, 147, 317–328. [Google Scholar] [CrossRef]
- Chen, H.; Liu, B.; Liu, R.; Weng, Q.; Zhang, T.; Pei, P. Optimal interval of air stoichiometry under different operating parameters and electrical load conditions of proton exchange membrane fuel cell. Energy Convers. Manag. 2020, 205, 112398. [Google Scholar] [CrossRef]
- Hu, C.; Zhao, Y.; Zhang, Z.; Zhang, H.; Chen, D. Optimization of flow field structure for proton exchange membrane fuel cell stack by multi-physics coupling simulation. Int. J. Electrochem. Sci. 2023, 18, 100195. [Google Scholar] [CrossRef]
- Ke, Y.; Zhang, B.; Yuan, W.; Bai, Y.; Zhao, Y.; Lin, Z.; Li, X.; Wang, Y.; Tang, Y. Performance enhancement of proton exchange membrane fuel cells with bio-inspired gear-shaped flow channels. Chem. Eng. J. 2023, 474, 145870. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, R.; Su, L.; Wang, X.; Chu, X.; Ma, Y.; Wu, L.; Song, G.; Zhou, W. Synergistic mass transfer and performance stability of a proton exchange membrane fuel cell with traveling wave flow channels. Energy 2023, 285, 129360. [Google Scholar] [CrossRef]
- Liu, Q.; Lan, F.; Chen, J.; Wang, J.; Zeng, C. Flow field structure design modification with helical baffle for proton exchange membrane fuel cell. Energy Convers. Manag. 2022, 269, 116175. [Google Scholar] [CrossRef]
- Zhao, C.; Xing, S.; Liu, W.; Wang, H. Air and H2 feed systems optimization for open-cathode proton exchange membrane fuel cells. Int. J. Hydrogen Energy 2021, 46, 11940–11951. [Google Scholar] [CrossRef]
- Pamplona Solis, B.; Cruz Argüello, J.C.; Gomez Barba, L.; Gurrola, M.P.; Zarhri, Z.; TrejoArroyo, D.L.J.S. Bibliometric analysis of the mass transport in a gas diffusion layer in PEM fuel cells. Sustainability 2019, 11, 6682. [Google Scholar] [CrossRef]
- Solis, B.B.P.; Argüello, J.C.C.; Canche, I.M.; Barba, L.G.; Gurrola, M.P.J.C.L. CFD Analysis in the Mesh Modified Gas Diffusion Layer of a Proton Exchange Membrane Fuel Cell (PEMFC). CFD Lett. 2024, 16, 55–67. [Google Scholar]
- Zhao, C.; Xing, S.; Liu, W.; Chen, M.; Wang, H. Performance improvement for air-cooled open-cathode proton exchange membrane fuel cell with different design parameters of the gas diffusion layer. Prog. Nat. Sci. Mater. Int. 2020, 30, 825–831. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, K.; Zhang, J.; Ding, H.; Xin, D.; Zhang, F.; Sun, S. Gas-liquid mass transfer characteristics of a novel three-dimensional flow field bipolar plate for laser additive manufacturing of proton exchange membrane fuel cell. Renew. Energy 2023, 212, 308–319. [Google Scholar] [CrossRef]
- Zhang, G.; Qu, Z.; Wang, Y. Proton exchange membrane fuel cell of integrated porous bipolar plate–gas diffusion layer structure: Entire morphology simulation. eTransportation 2023, 17, 100250. [Google Scholar] [CrossRef]
- Bai, X.; Luo, L.; Huang, B.; Jian, Q.; Cheng, Z. Performance improvement of proton exchange membrane fuel cell stack by dual-path hydrogen supply. Energy 2022, 246, 123297. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, H.; He, S.; Wang, W.; Gao, M.; Moiseevna, K.E.; Anatolievna, V.V. Dynamic analysis and control optimization of hydrogen supply for the proton exchange membrane fuel cell and metal hydride coupling system with a hydrogen buffer tank. Energy Convers. Manag. 2023, 291, 117339. [Google Scholar] [CrossRef]
- Chen, H.; Zhao, X.; Zhang, T.; Pei, P. The reactant starvation of the proton exchange membrane fuel cells for vehicular applications: A review. Energy Convers. Manag. 2019, 182, 282–298. [Google Scholar] [CrossRef]
- Hou, J.; Yang, M.; Zhang, J. Active and passive fuel recirculation for solid oxide and proton exchange membrane fuel cells. Renew. Energy 2020, 155, 1355–1371. [Google Scholar] [CrossRef]
- Liu, Y.; Tu, Z.; Chan, S.H. Applications of ejectors in proton exchange membrane fuel cells: A review. Fuel Process. Technol. 2021, 214, 106683. [Google Scholar] [CrossRef]
- Kuo, J.-K.; Jiang, W.-Z.; Li, C.-H.; Hsu, T.-H. Numerical investigation into hydrogen supply stability and IV performance of PEM fuel cell system with passive Venturi ejector. Appl. Therm. Eng. 2020, 169, 114908. [Google Scholar] [CrossRef]
- Le Tri, D.T.; Vu, H.N.; Woo, J.; Kim, Y.; Yu, S. Optimization of the ejector parameters for anodic recirculation systems in high-performance dual-stack proton-exchange membrane fuel cells. Energy Convers. Manag. 2023, 296, 117712. [Google Scholar] [CrossRef]
- Li, F.; Du, J.; Zhang, L.; Li, J.; Li, G.; Zhu, G.; Ouyang, M.; Chai, J.; Li, H. Experimental determination of the water vapor effect on subsonic ejector for proton exchange membrane fuel cell (PEMFC). Int. J. Hydrogen Energy 2017, 42, 29966–29970. [Google Scholar] [CrossRef]
- Kuo, J.-K.; Hsieh, C.-Y. Numerical investigation into effects of ejector geometry and operating conditions on hydrogen recirculation ratio in 80 kW PEM fuel cell system. Energy 2021, 233, 121100. [Google Scholar] [CrossRef]
- Bian, J.; Zhang, Y.; Liu, Y.; Gong, L.; Cao, X. Structural optimization of hydrogen recirculation ejector for proton exchange membrane fuel cells considering the boundary layer separation effect. J. Clean. Prod. 2023, 397, 136535. [Google Scholar] [CrossRef]
- Liu, W.; Berning, T.; Liso, V. Low stoichiometry operation of the anode side of a low-temperature proton exchange membrane fuel cell–A modeling study. Int. J. Hydrogen Energy 2023, 52, 1047–1055. [Google Scholar] [CrossRef]
- Lee, H.-Y.; Su, H.-C.; Chen, Y.-S. A gas management strategy for anode recirculation in a proton exchange membrane fuel cell. Int. J. Hydrogen Energy 2018, 43, 3803–3808. [Google Scholar] [CrossRef]
- Nikiforow, K.; Koski, P.; Ihonen, J. Discrete ejector control solution design, characterization, and verification in a 5 kW PEMFC system. Int. J. Hydrogen Energy 2017, 42, 16760–16772. [Google Scholar] [CrossRef]
- Yin, B.; Li, Z.; Dong, F.; Xu, S.; Ni, H. A novel dual-nozzle ejector for enhancement of hydrogen recirculation applied to proton exchange membrane fuel cell system. J. Power Sources 2023, 580, 233444. [Google Scholar] [CrossRef]
- Le Tri, D.T.; Vu, H.N.; Nguyen, H.L.; Kim, Y.; Yu, S. A comparative study of single and dual ejector concepts for anodic recirculation system in high-performance vehicular proton exchange membrane fuel cells. Int. J. Hydrogen Energy 2023, 70, 27344–27360. [Google Scholar] [CrossRef]
- Liu, Y.; Tu, Z.; Chan, S.H. Water management and performance enhancement in a proton exchange membrane fuel cell system using optimized gas recirculation devices. Energy 2023, 279, 128029. [Google Scholar] [CrossRef]
- Chiche, A.; Lindbergh, G.; Stenius, I.; Lagergren, C. Design of experiment to predict the time between hydrogen purges for an air-breathing PEM fuel cell in dead-end mode in a closed environment. Int. J. Hydrogen Energy 2021, 46, 13806–13817. [Google Scholar] [CrossRef]
- Liu, S.; Li, X.; Pang, L.; Geng, T.; Guo, Y.; Jiang, L.; Kang, K.; Wang, X.; Liu, Z. Study on the effect of purging time on the performance of PEMFC with dead-ended anode under gravity. Renew. Energy 2022, 200, 1141–1151. [Google Scholar] [CrossRef]
- Lin, Y.-F.; Chen, Y.-S. Experimental study on the optimal purge duration of a proton exchange membrane fuel cell with a dead-ended anode. J. Power Sources 2017, 340, 176–182. [Google Scholar] [CrossRef]
- Shen, K.-Y.; Park, S.; Kim, Y.-B. Hydrogen utilization enhancement of proton exchange membrane fuel cell with anode recirculation system through a purge strategy. Int. J. Hydrogen Energy 2020, 45, 16773–16786. [Google Scholar] [CrossRef]
- Qiu, D.; Zhou, X.; Chen, M.; Xu, Z.; Peng, L. Optimization of control strategy for air-cooled PEMFC based on in-situ observation of internal reaction state. Appl. Energy 2023, 350, 121752. [Google Scholar] [CrossRef]
- Fan, L.; Tu, Z.; Chan, S.H. Prototype design of an extended range electric sightseeing bus with an air-cooled proton exchange membrane fuel cell stack based on a voltage control logic of hydrogen purging. J. Power Sources 2022, 537, 231541. [Google Scholar] [CrossRef]
- Wang, B.; Deng, H.; Jiao, K. Purge strategy optimization of proton exchange membrane fuel cell with anode recirculation. Appl. Energy 2018, 225, 1–13. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, J.; Liu, H.; Yan, C.; Hou, Y.; He, Q.; Zhang, J.; Hissel, D. Anode purge management for hydrogen utilization and stack durability improvement of PEM fuel cell systems. Appl. Energy 2020, 275, 115110. [Google Scholar] [CrossRef]
- Nikiforow, K.; Pennanen, J.; Ihonen, J.; Uski, S.; Koski, P. Power ramp rate capabilities of a 5 kW proton exchange membrane fuel cell system with discrete ejector control. J. Power Sources 2018, 381, 30–37. [Google Scholar] [CrossRef]
- Chen, J.; Wu, Z.; Wu, C.; Yan, C. Observer based fuel delivery control for PEM fuel cells with a segmented anode model. Asian J. Control 2019, 21, 1781–1795. [Google Scholar] [CrossRef]
- Hong, L.; Chen, J.; Liu, Z.; Huang, L.; Wu, Z. A nonlinear control strategy for fuel delivery in PEM fuel cells considering nitrogen permeation. Int. J. Hydrogen Energy 2017, 42, 1565–1576. [Google Scholar] [CrossRef]
- Kuo, J.-K.; Thamma, U.; Wongcharoen, A.; Chang, Y.-K. Optimized fuzzy proportional integral controller for improving output power stability of active hydrogen recovery 10-kW PEM fuel cell system. Int. J. Hydrogen Energy 2023, 50, 1080–1093. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhang, Y.; Chen, Q. Energy management strategy of fuel-cell Backup power supply systems based on Whale optimization Fuzzy control. Electronics 2022, 11, 2325. [Google Scholar] [CrossRef]
- Wang, B.; Wu, K.; Yang, Z.; Jiao, K. A quasi-2D transient model of proton exchange membrane fuel cell with anode recirculation. Energy Convers. Manag. 2018, 171, 1463–1475. [Google Scholar] [CrossRef]
- Sankar, K.; Jana, A.K. Dynamics and estimator-based nonlinear control of a PEM fuel cell. IEEE Trans. Control Syst. Technol. 2017, 26, 1124–1131. [Google Scholar] [CrossRef]
- Wang, X.; Lu, Y.; Zhang, B.; Liu, J.; Xu, S. Experimental analysis of an ejector for anode recirculation in a 10 kW polymer electrolyte membrane fuel cell system. Int. J. Hydrogen Energy 2022, 47, 1925–1939. [Google Scholar] [CrossRef]
- Ye, X.; Zhang, T.; Chen, H.; Cao, J.; Chen, J. Fuzzy control of hydrogen pressure in fuel cell system. Int. J. Hydrogen Energy 2019, 44, 8460–8466. [Google Scholar] [CrossRef]
- Zhang, Q.; Tong, Z.; Tong, S.; Cheng, Z. Modeling and dynamic performance research on proton exchange membrane fuel cell system with hydrogen cycle and dead-ended anode. Energy 2021, 218, 119476. [Google Scholar] [CrossRef]
- Li, X.; Wei, H.; Du, C.; Shi, C.; Zhang, J. Control strategy for the anode gas supply system in a proton exchange membrane fuel cell system. Energy Rep. 2023, 10, 4342–4358. [Google Scholar] [CrossRef]
- Yuan, H.; Dai, H.; Wu, W.; Xie, J.; Shen, J.; Wei, X. A fuzzy logic PI control with feedforward compensation for hydrogen pressure in vehicular fuel cell system. Int. J. Hydrogen Energy 2021, 46, 5714–5728. [Google Scholar] [CrossRef]
- Wei, H.; Du, C.; Li, X.; Shi, C.; Zhang, J. Research on anode pressure control and dynamic performance of proton-exchange membrane fuel cell system for vehicular application. Fuel 2024, 358, 130219. [Google Scholar] [CrossRef]
- Zhu, Y.; Zou, J.; Li, S.; Peng, C.; Xie, Y. Nonlinear model predictive control of PEMFC anode hydrogen circulation system based on dynamic coupling analysis. Int. J. Hydrogen Energy 2023, 48, 2385–2400. [Google Scholar] [CrossRef]
- Chatrattanawet, N.; Hakhen, T.; Kheawhom, S.; Arpornwichanop, A. Control structure design and robust model predictive control for controlling a proton exchange membrane fuel cell. J. Clean. Prod. 2017, 148, 934–947. [Google Scholar] [CrossRef]
- Quan, S.; Wang, Y.-X.; Xiao, X.; He, H.; Sun, F. Feedback linearization-based MIMO model predictive control with defined pseudo-reference for hydrogen regulation of automotive fuel cells. Appl. Energy 2021, 293, 116919. [Google Scholar] [CrossRef]
- Zeng, T.; Zhang, C.; Zhou, A.; Wu, Q.; Deng, C.; Chan, S.H.; Chen, J.; Foley, A.M. Enhancing reactant mass transfer inside fuel cells to improve dynamic performance via intelligent hydrogen pressure control. Energy 2021, 230, 120620. [Google Scholar] [CrossRef]
- Pan, T.; Shen, J.; Sun, L.; Lee, K.Y. Thermodynamic modelling and intelligent control of fuel cell anode purge. Appl. Therm. Eng. 2019, 154, 196–207. [Google Scholar] [CrossRef]
- Deng, H.; Chen, W.; Cao, D.; Chen, J.; Hu, W. Uncertainty analysis and robust control of fuel delivery systems considering nitrogen crossover phenomenon. Int. J. Hydrogen Energy 2020, 45, 32367–32387. [Google Scholar] [CrossRef]
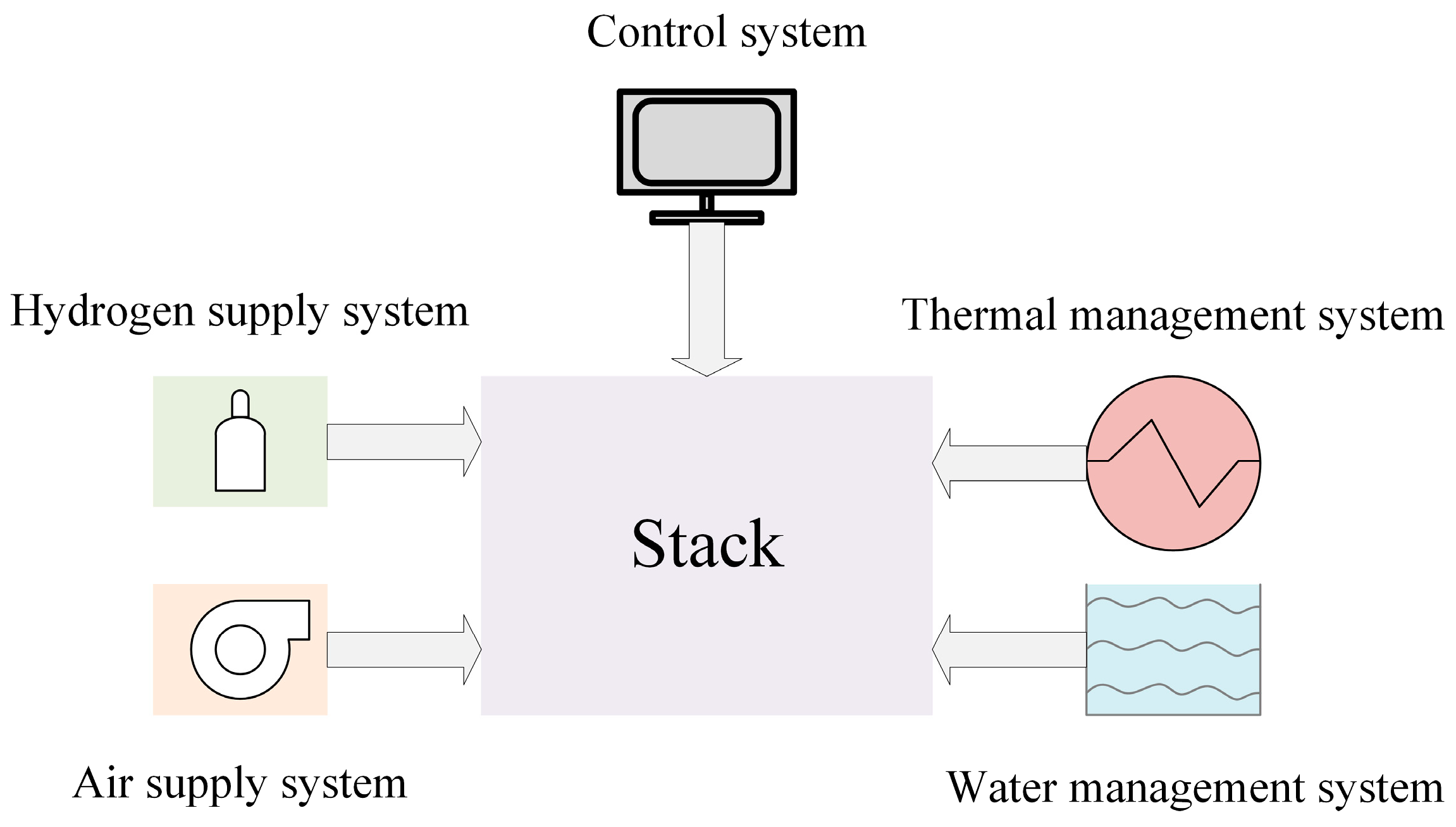
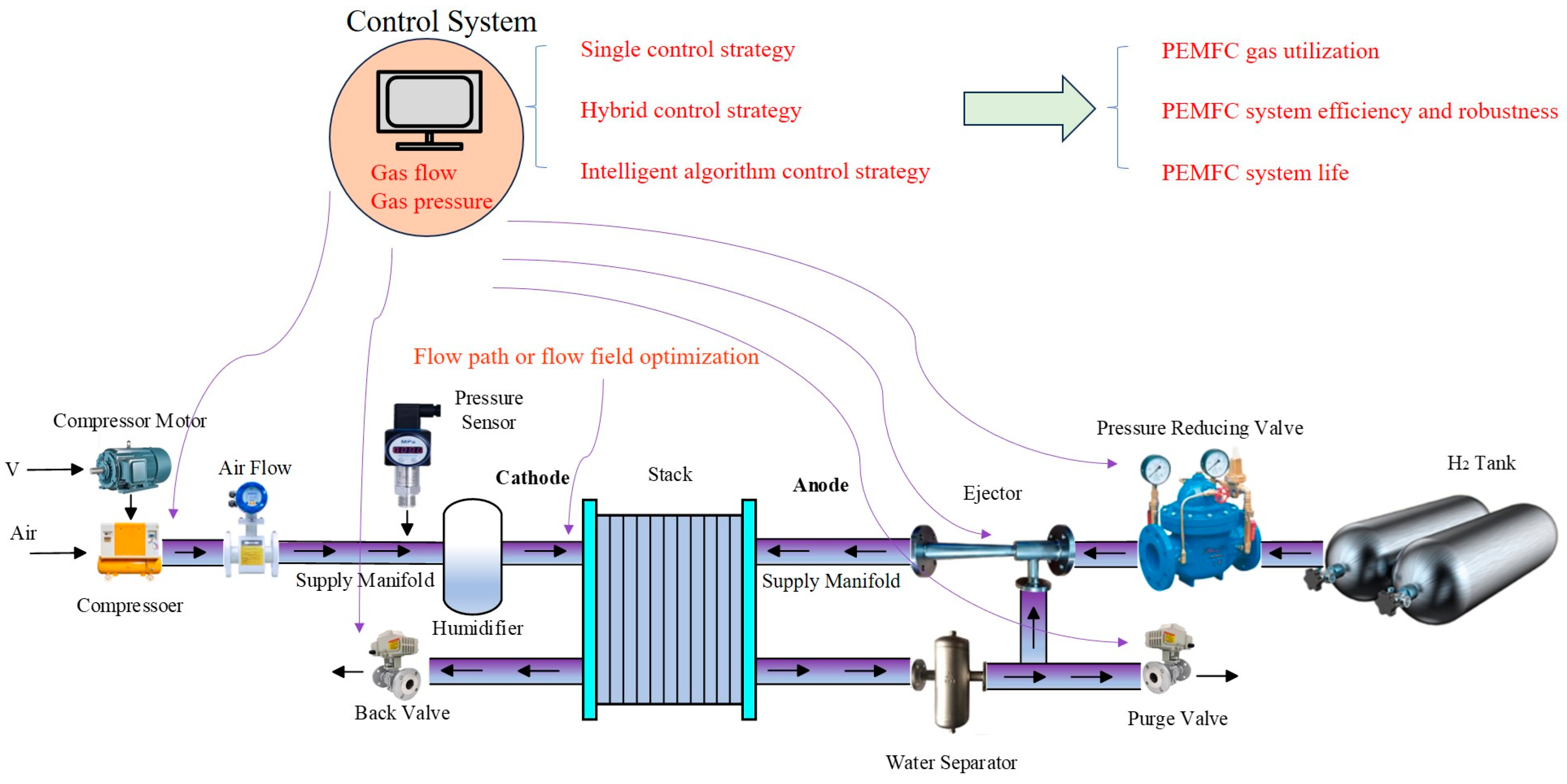
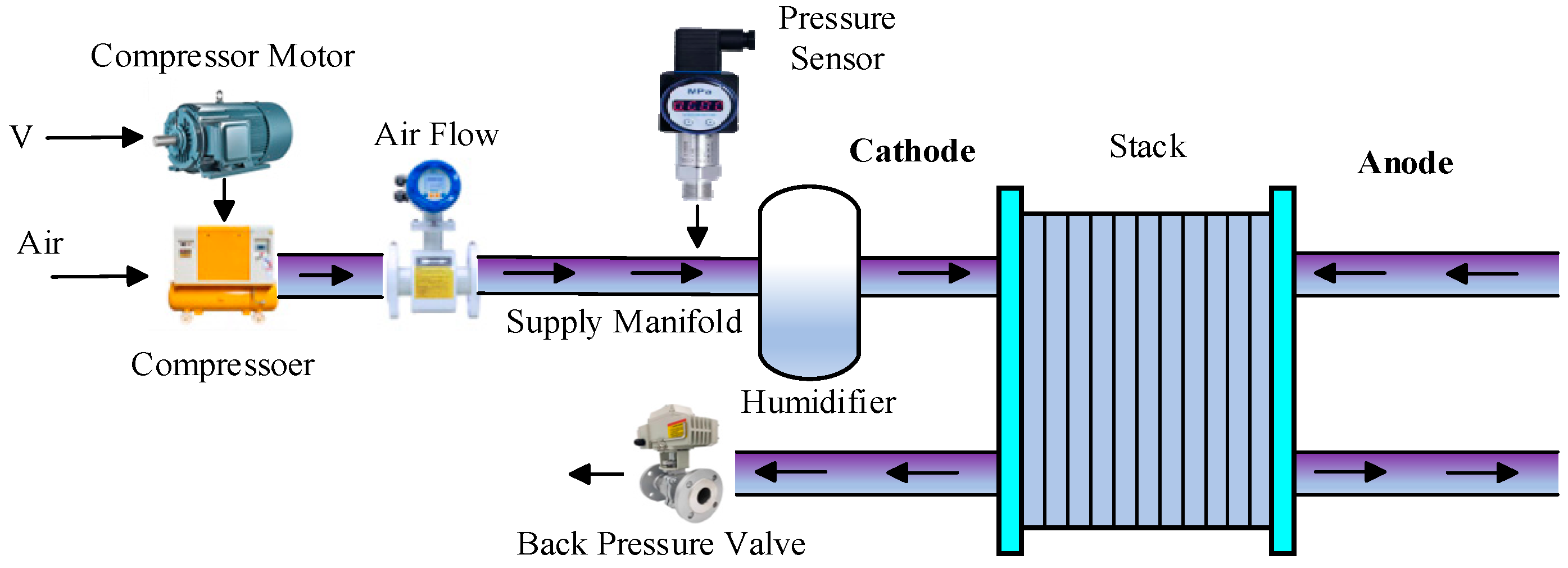
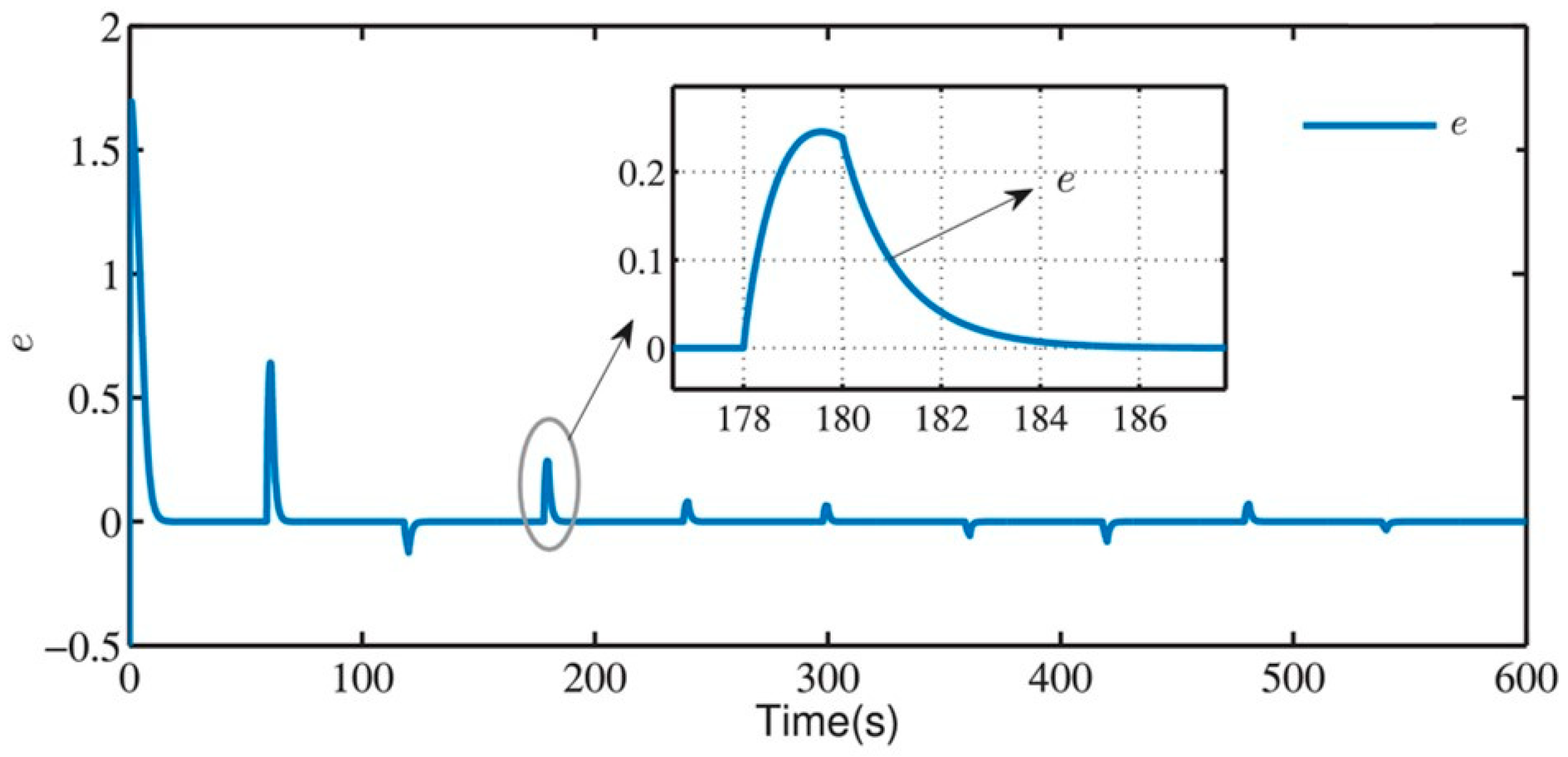
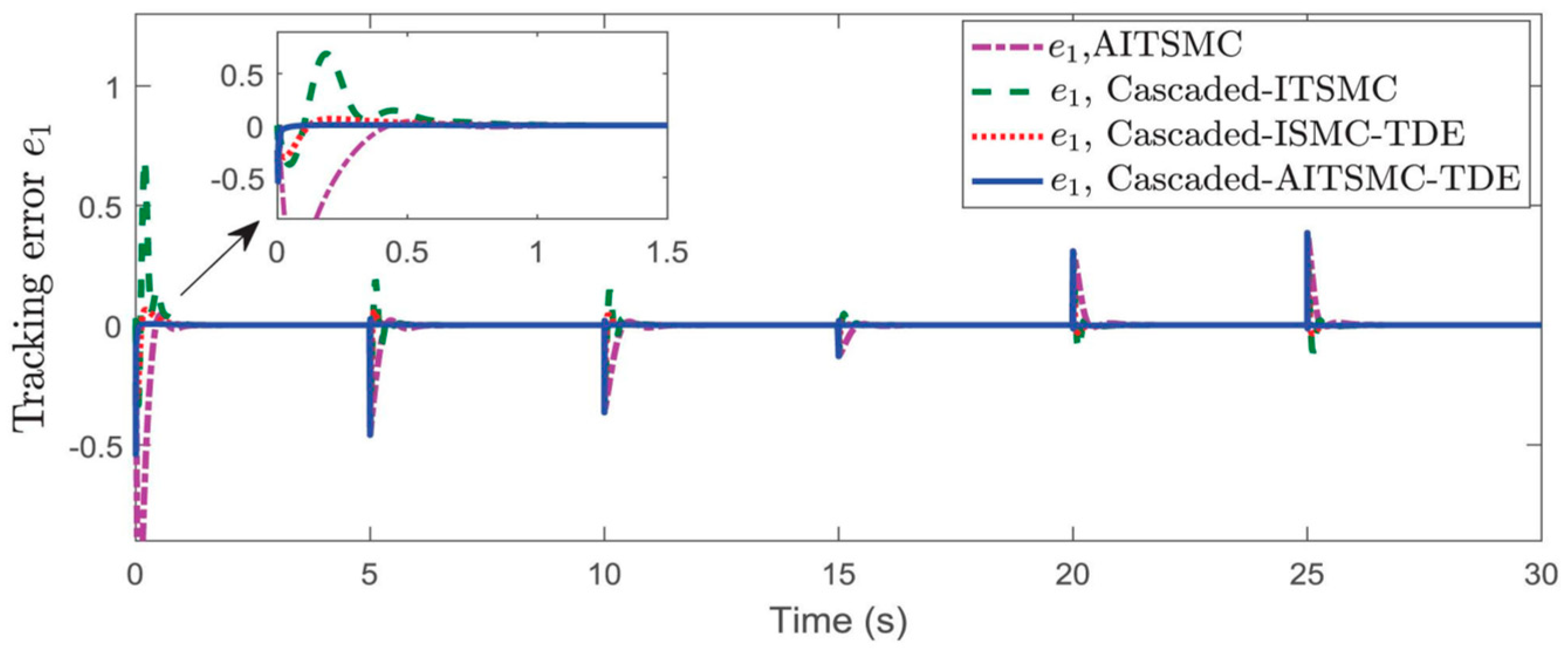
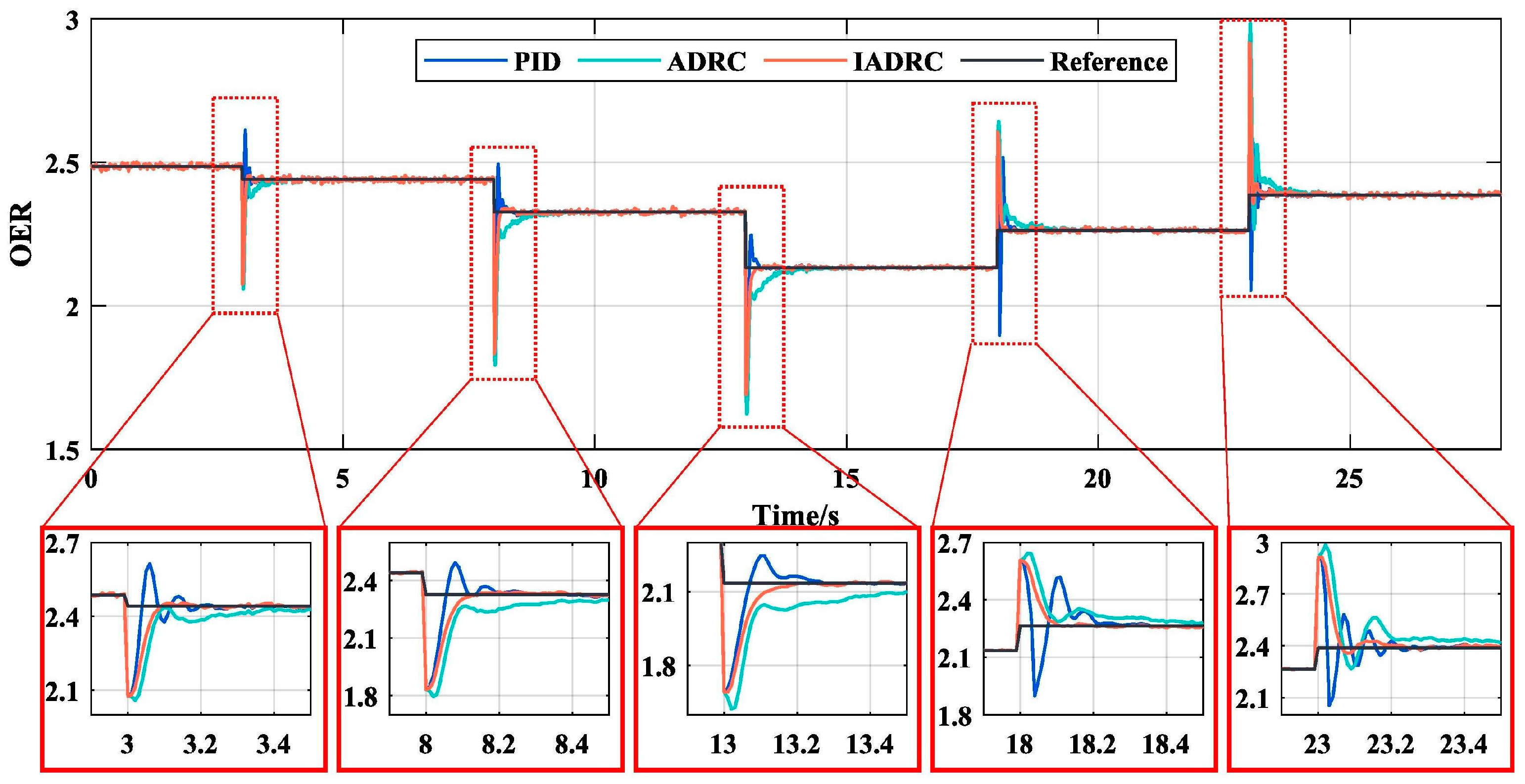
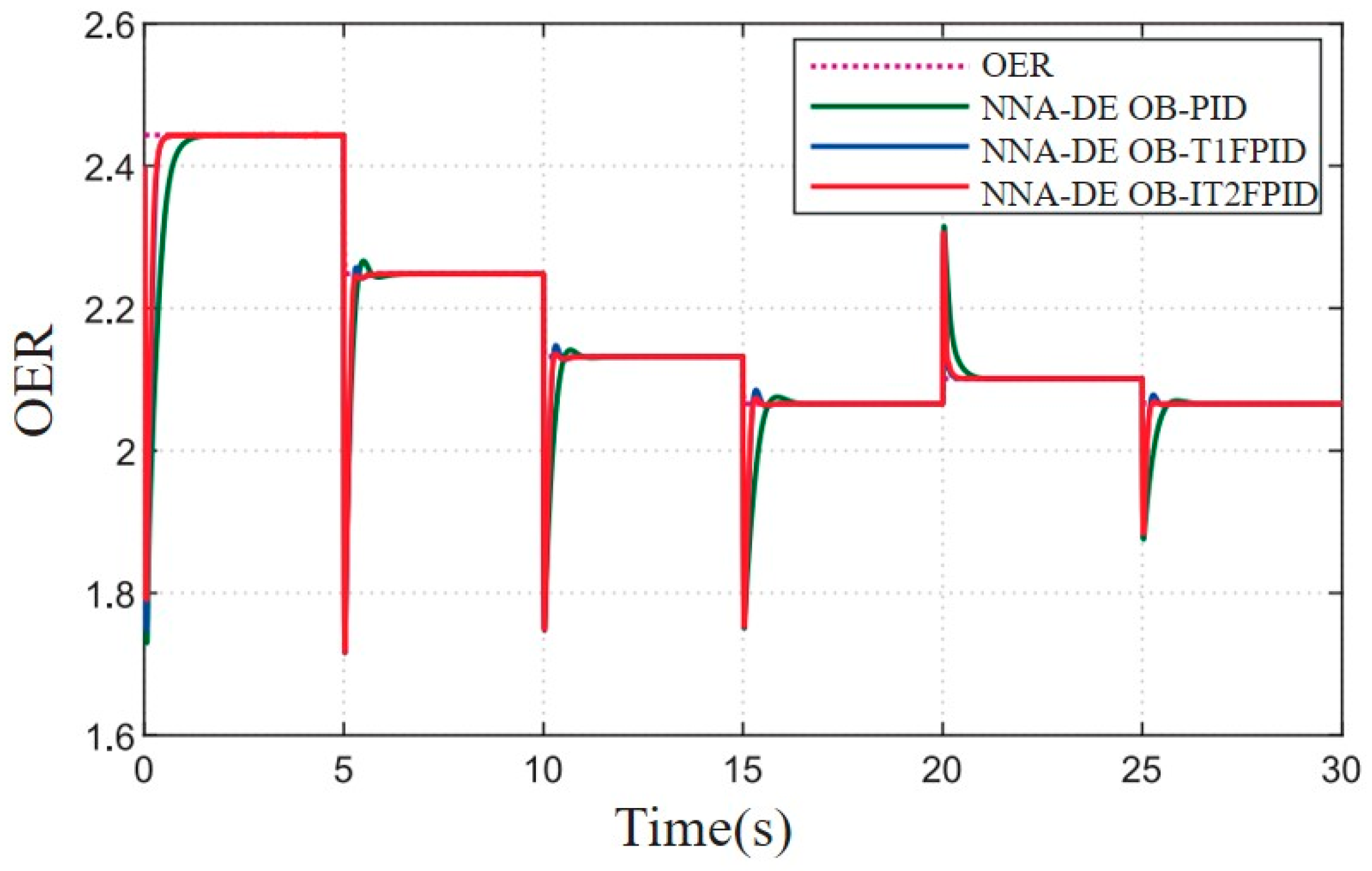
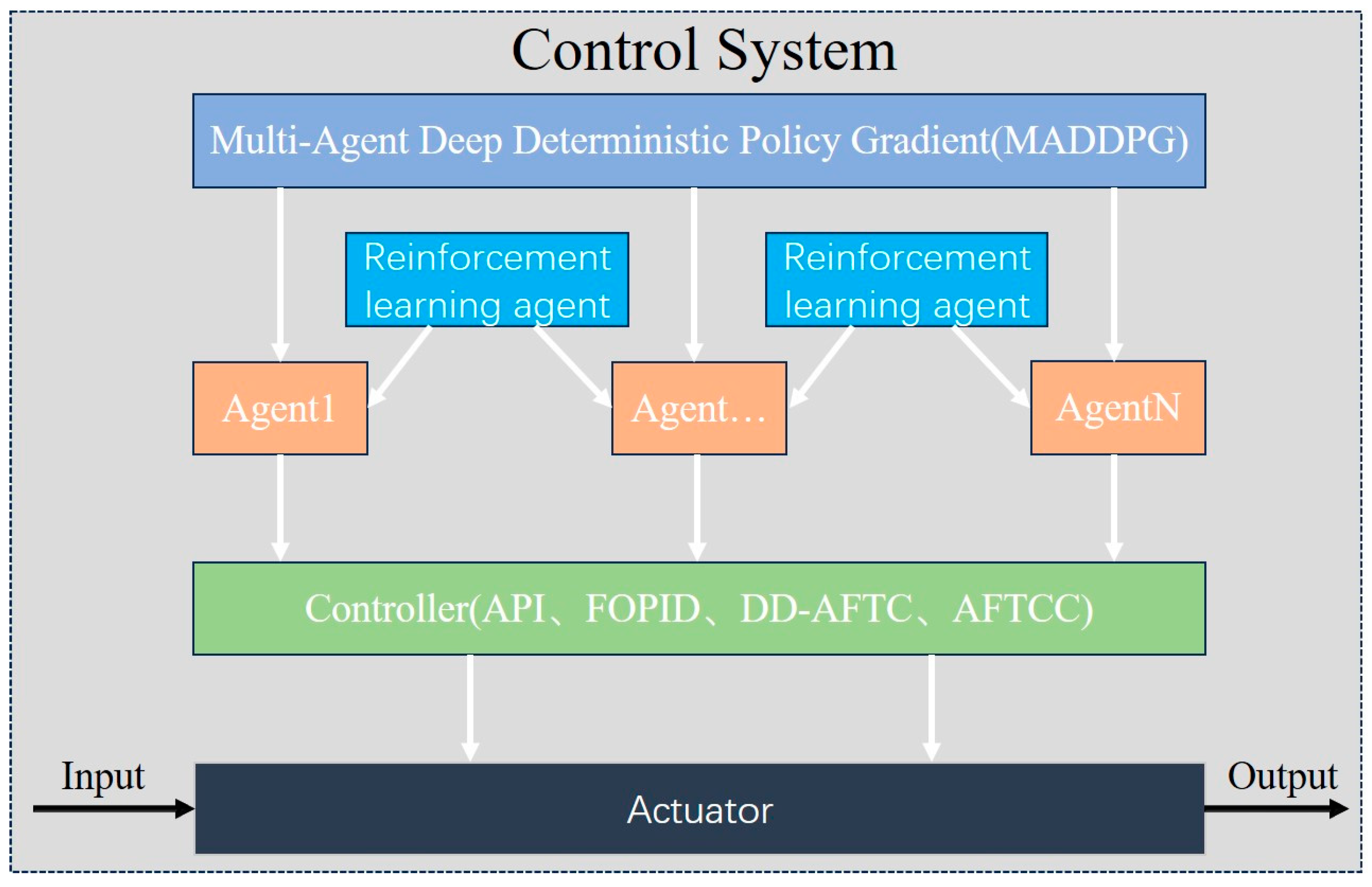
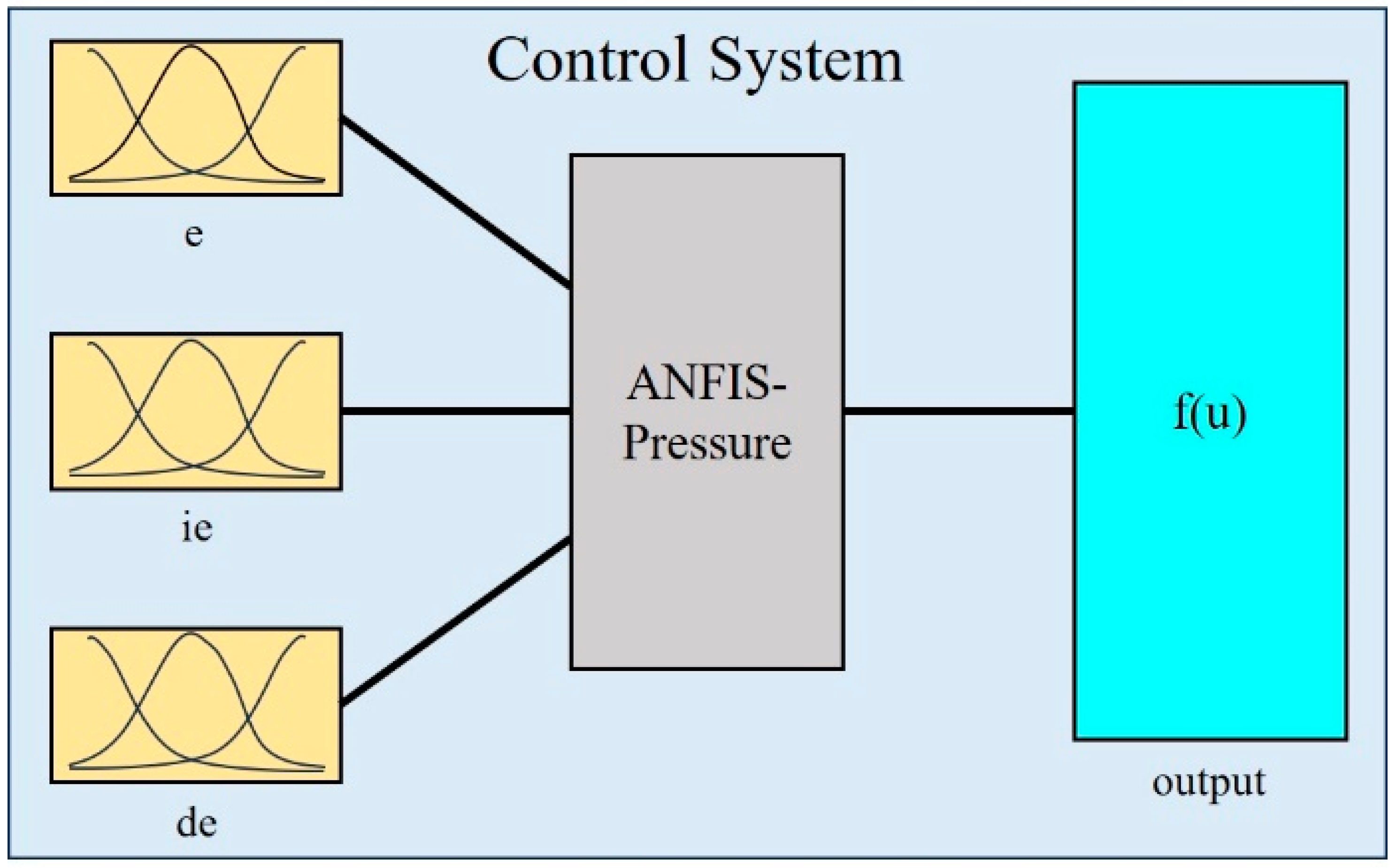
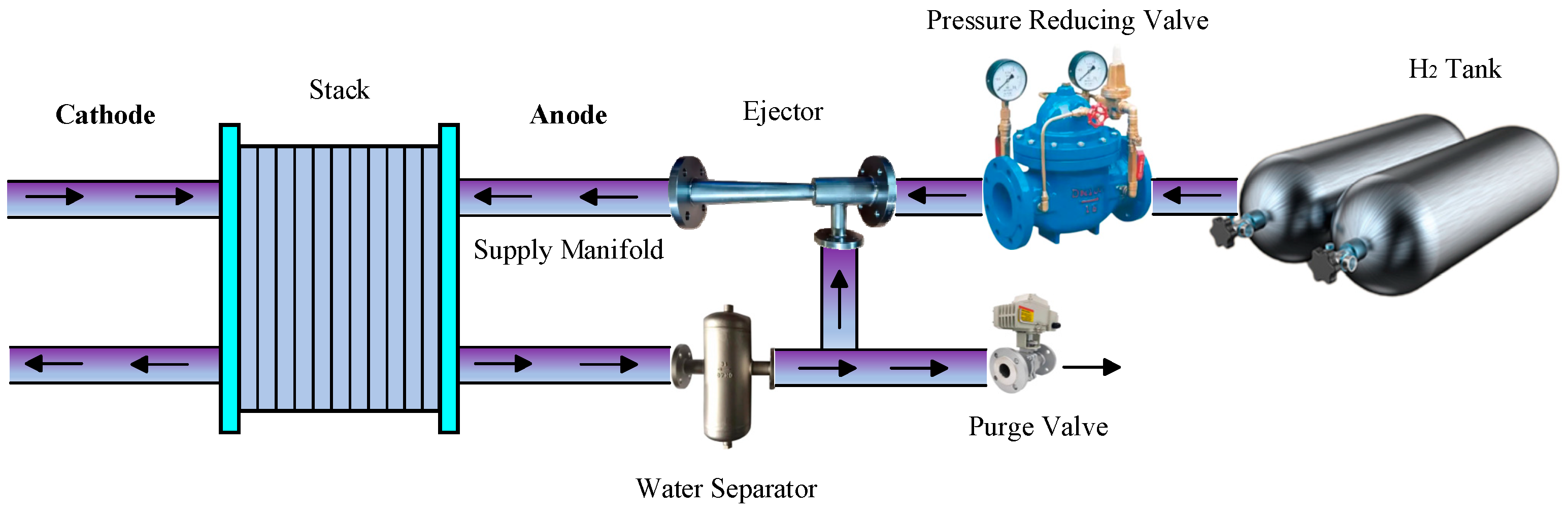
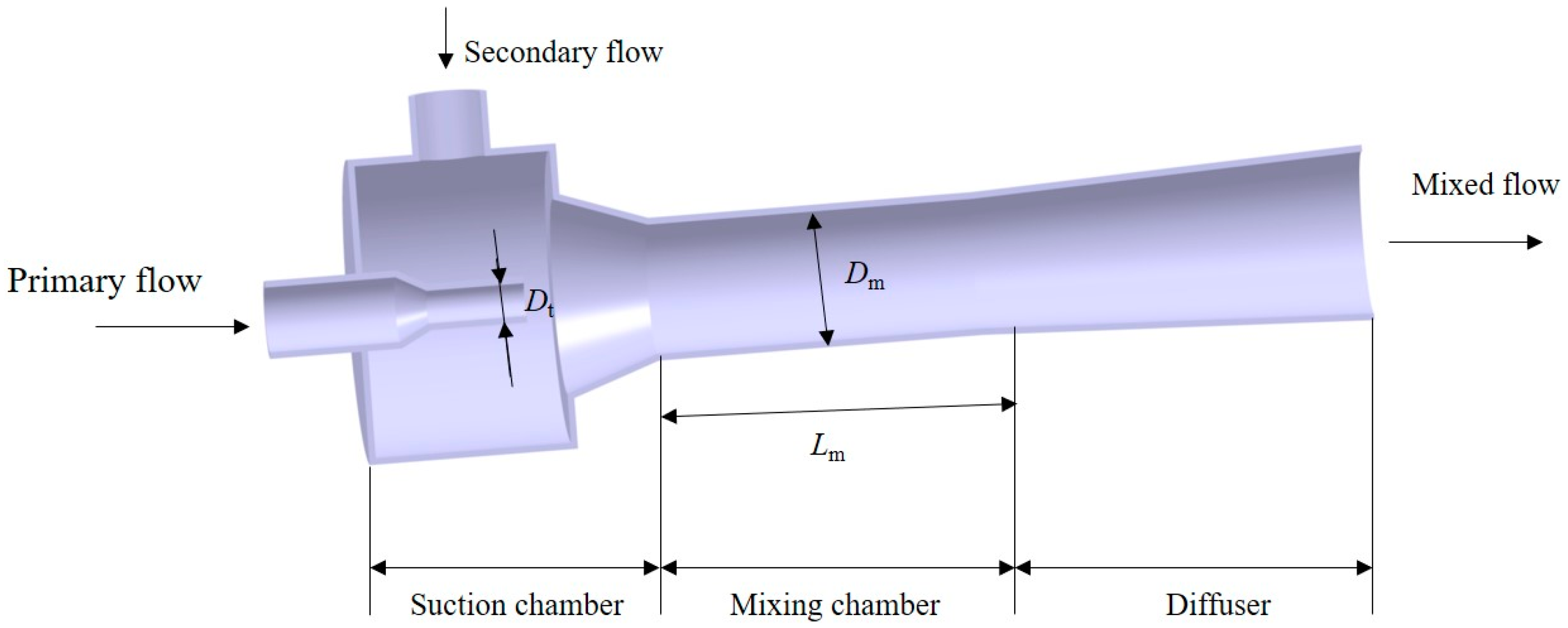
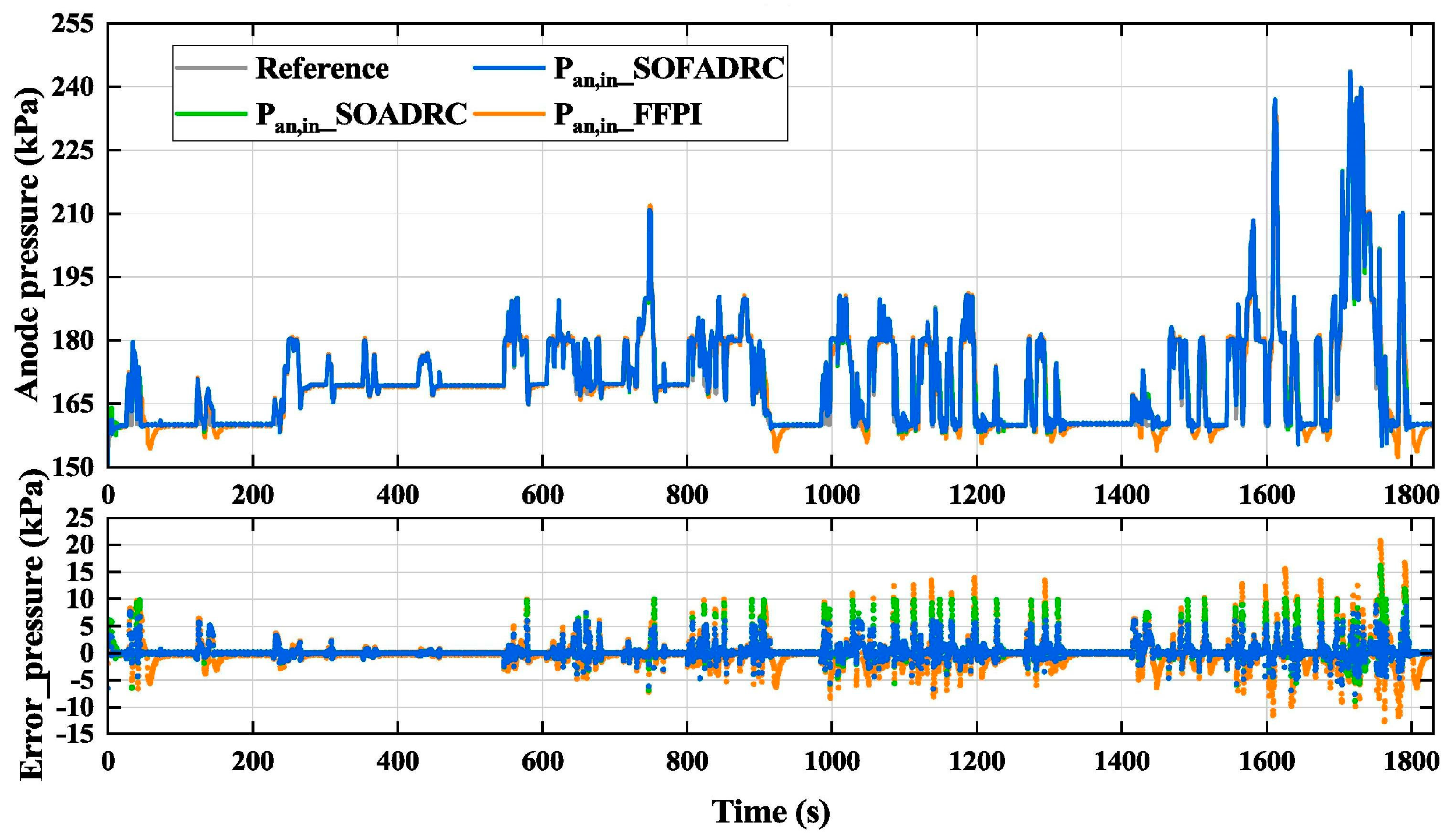
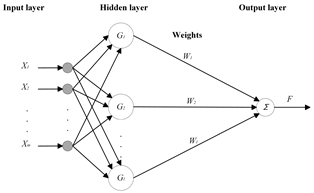
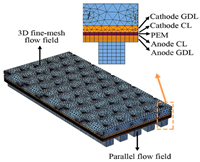
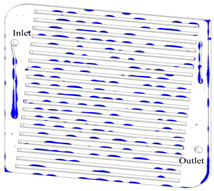
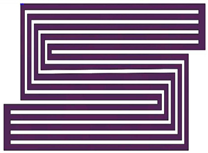
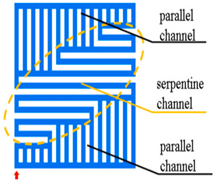
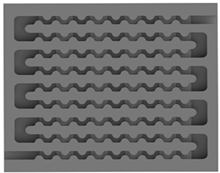
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).