
Investigating Magnetohydrodynamic Motions of Oldroyd-B Fluids through a Circular Cylinder Filled with Porous Medium

Abstract
:1. Introduction
2. Basic Equations
- -
- The applied magnetic field is perpendicular to the velocity field;
- -
- Permeability is constant throughout the fluid;
- -
- The excess charge density and imposed electric field are equal to zero;
- -
- The induced magnetic field is negligible in comparison with the applied magnetic field .
3. Problem Presentation
4. Analytic Solutions
4.1. The Cylinder Oscillates along Its Axis with the Velocity or
4.2. The Cylinder Moves along Its Axis with a Constant Velocity V
5. Application (MHD Motions of ECIOBFs with Shear Stress on the Boundary)
5.1. Case When the Cylinder Applies Oscillatory Shear Stresses to the Fluid
5.2. Case When the Cylinder Applies a Constant Shear Stress S to the Fluid
6. Some Numerical Results and Conclusions
- -
- The motion problem of ECIOBFs through an infinite circular cylinder that moves along its axis is completely solved, with magnetic and porous effects taken into account.
- -
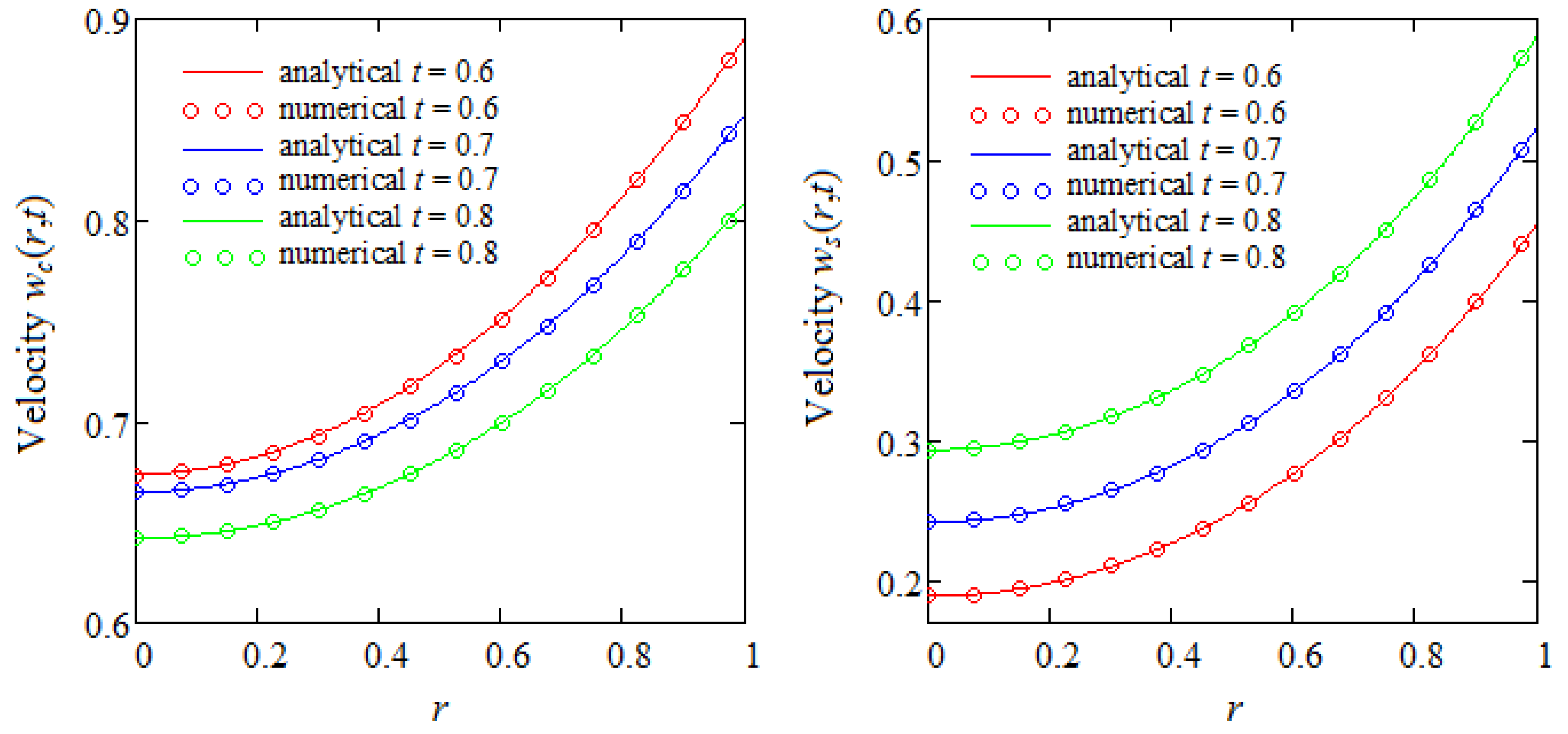
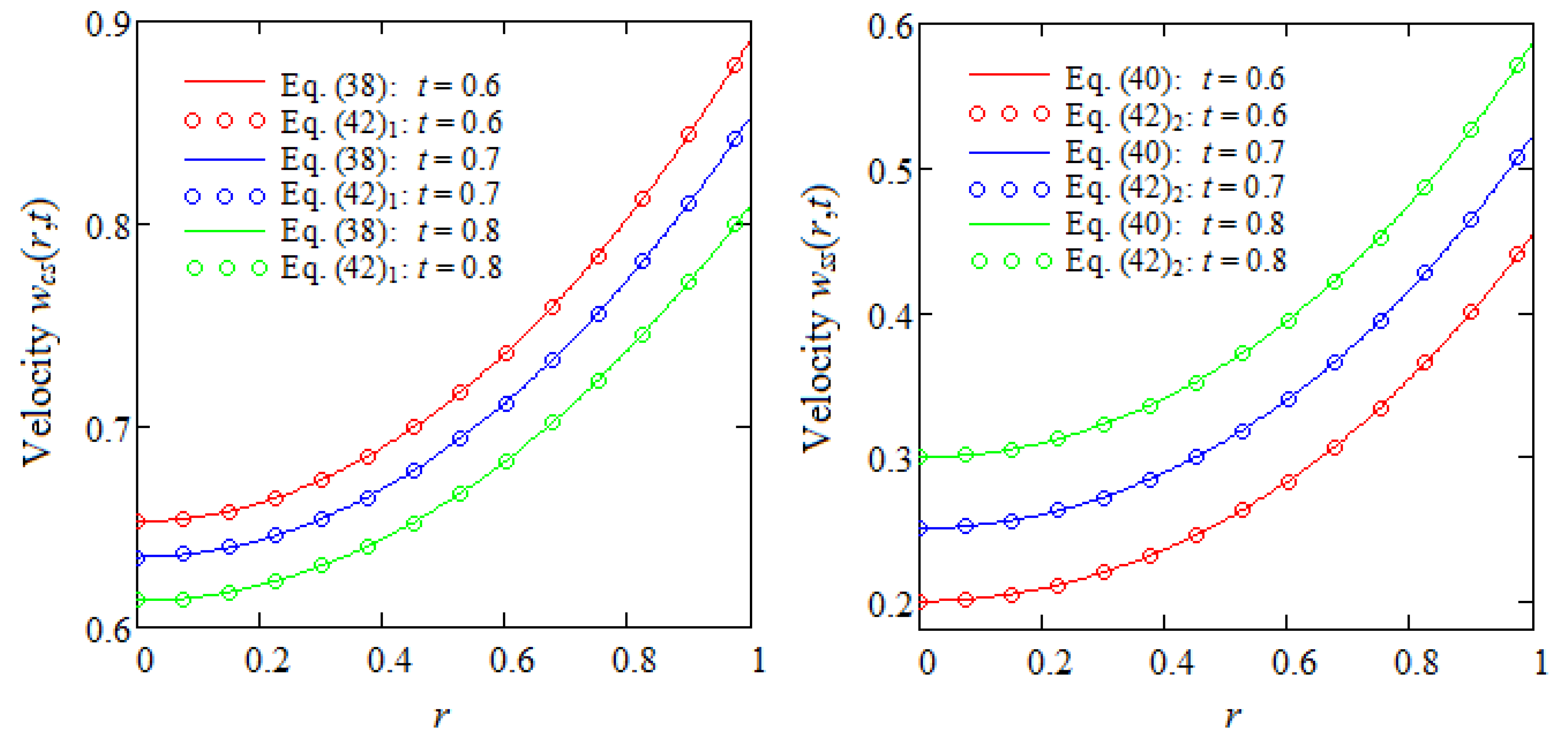
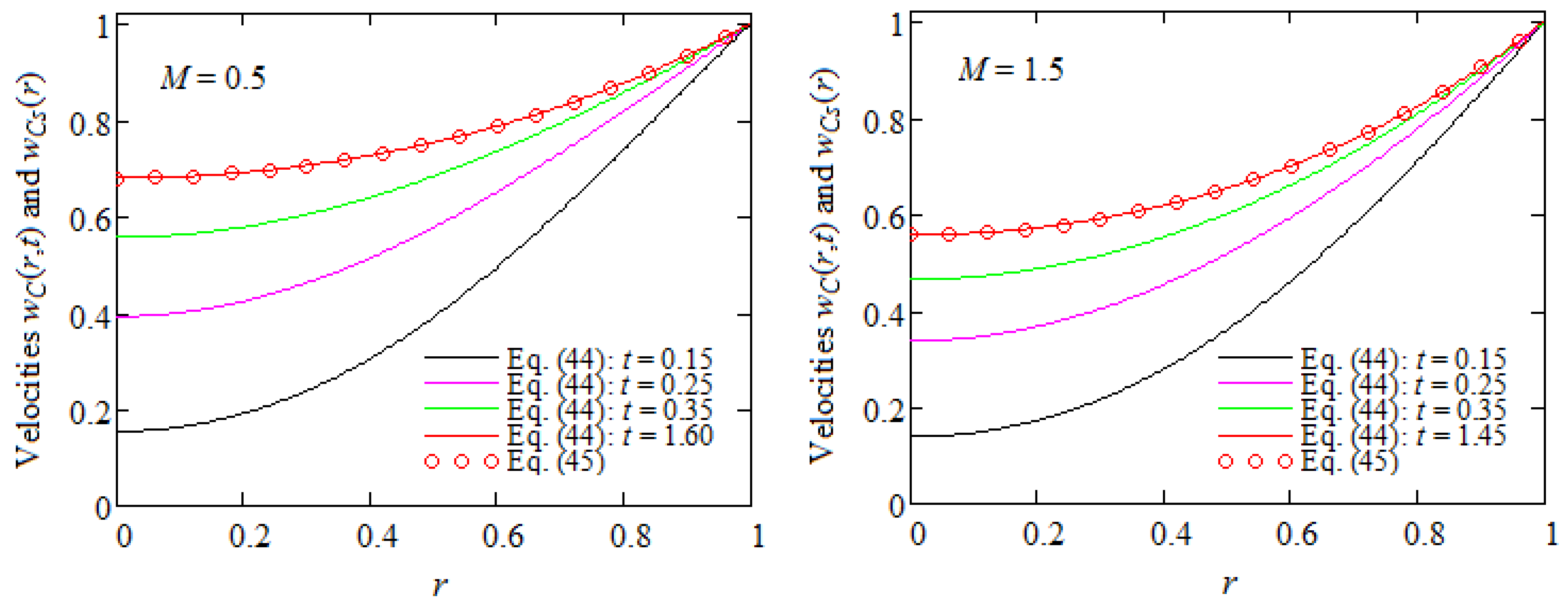
- A general expression has been determined for velocity field, and certain special cases are considered for illustration. The results are validated and graphically proved using comparisons.
- -
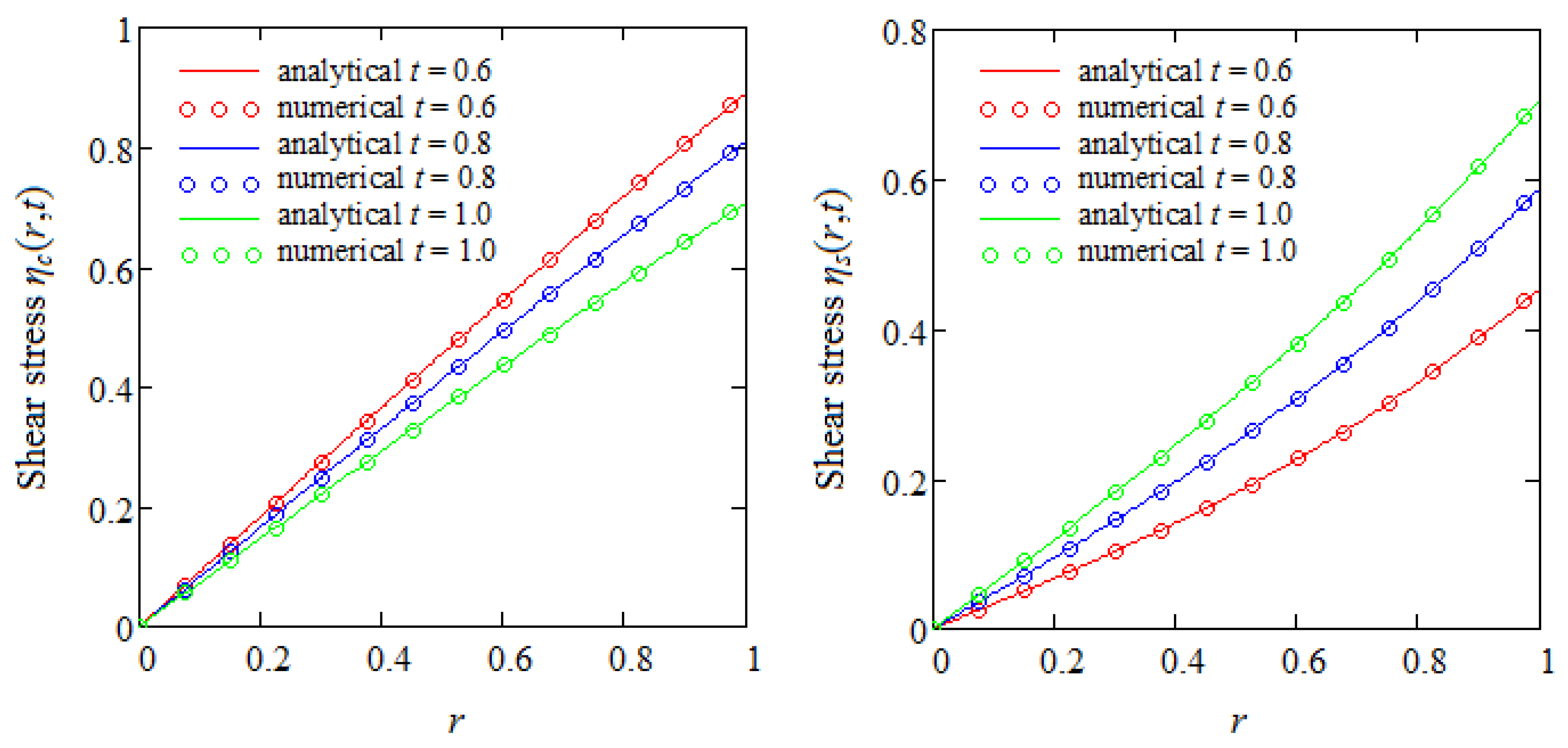
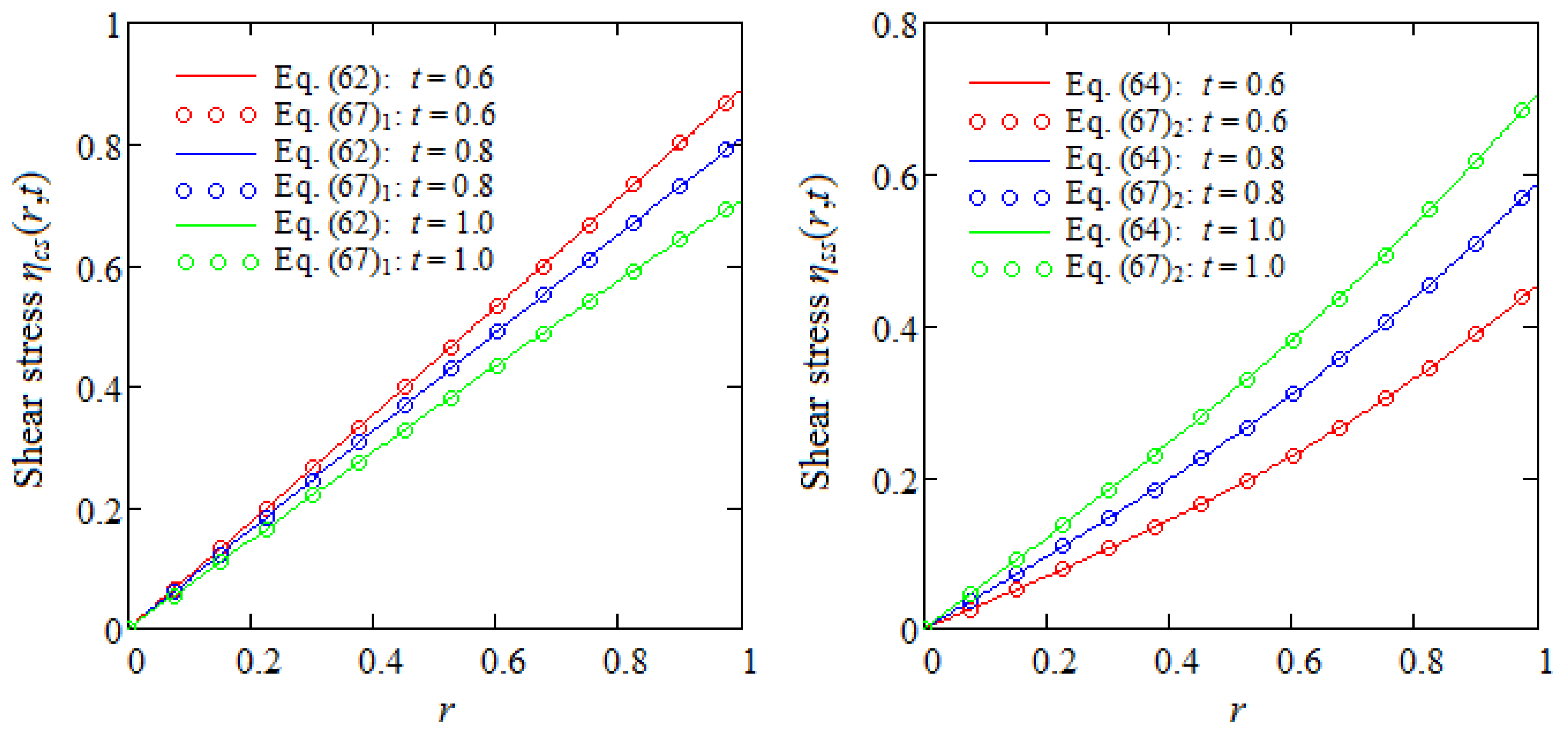
- A governing equation for the non-trivial shear stress corresponding to the MHD unsteady motions of ECIOBFs in cylindrical domains is revealed for the first time.
- -
- This equation and the previous results allow us to easily find a general expression of shear stress for motions induced by a cylinder that applies an arbitrary shear to the fluid. The corresponding velocity can be obtained by solving the linear differential equation.
- -
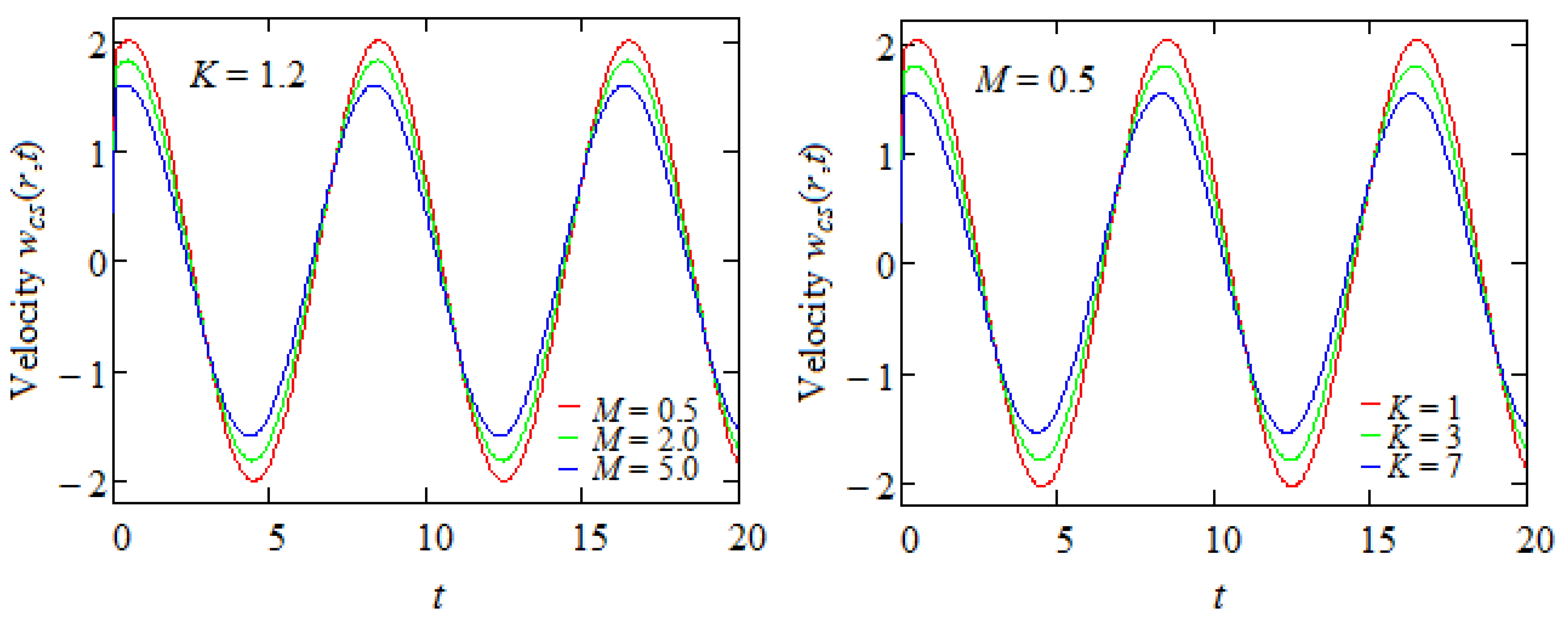
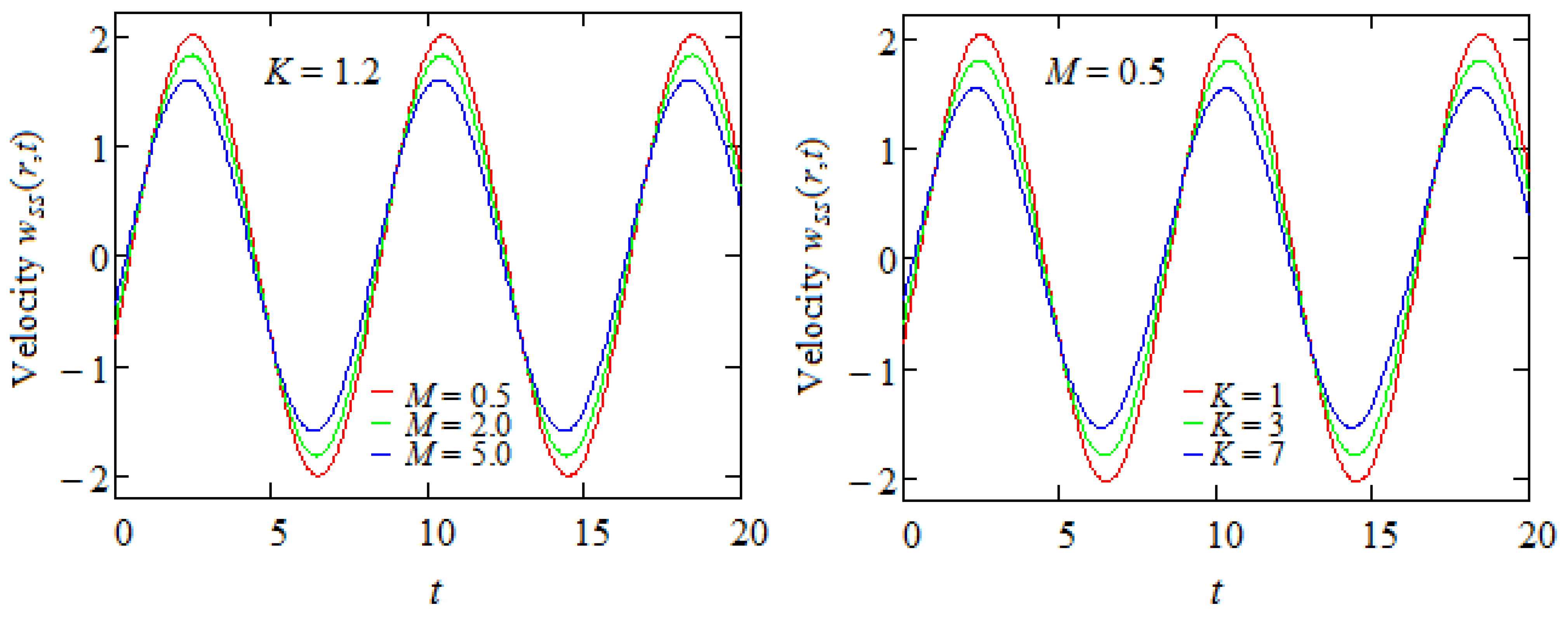
- Graphical representations show that in the presence of a magnetic field or porous medium, as expected, the fluid moves more slowly and the steady state is reached earlier.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Oldroyd, J.G. On the formulation of rheological equations of state. Proc. R. Soc. Lond. Ser. A 1950, 200, 523–541. [Google Scholar] [CrossRef]
- Bohme, G. Stromungsmechanik Nicht-Newtonscher Fluide; Teubner, B.G., Ed.; Springer: Stuttgart/Leipzig/Wiesbaden, Duitsland, 2000. [Google Scholar]
- Waters, N.D.; King, M.J. The unsteady flow of an elastico-viscous liquid in a straight pipe of circular cross section. J. Phys. D Appl. Phys. 1971, 4, 204–211. [Google Scholar] [CrossRef]
- Rajagopal, K.R.; Bhatnagar, R.K. Exact solutions for some simple flows of an Oldroyd-B fluid. Acta Mech. 1995, 113, 233–239. [Google Scholar] [CrossRef]
- Wood, W.P. Transient viscoelastic helical flow in pipes of circular and annular cross-section. J. Non-Newton. Fluid Mech. 2001, 100, 115–126. [Google Scholar] [CrossRef]
- Fetecau, C. Analytical solutions for non-Newtonian fluid flows in pipe-like domains. Int. J. Non-Linear Mech. 2004, 39, 225–231. [Google Scholar] [CrossRef]
- Fetecau, C.; Fetecau, C.; Vieru, D. On some helical flows of Oldroyd-B fluids. Acta Mech. 2007, 189, 53–63. [Google Scholar] [CrossRef]
- McGinty, S.; McKee, S.; McDermott, R. Analytic solutions of Newtonian and non-Newtonian pipe flows subject to a general time-dependent pressure gradient. J. Non-Newton. Fluid Mech. 2009, 162, 54–77. [Google Scholar] [CrossRef]
- Khan, I.; Fakhar, K.; Anwar, M.I. Hydromagnetic rotating flows of an Oldroyd-B fluid in a porous medium. Spec. Top. Rev. Porous Media Int. J. 2012, 3, 89–95. [Google Scholar] [CrossRef]
- Imran, M.; Tahir, M.; Imran, M.A.; Awan, A.U. Taylor-Couette flow of an Oldroyd-B fluid in an annulus subject to a time-dependent rotation. Am. J. Appl. Math. 2015, 3, 25–31. [Google Scholar] [CrossRef]
- Ullah, S.; Tanveer, M.; Bajwa, S. Study of velocity and shear stress for unsteady flow of incompressible Oldroyd-B fluid between two concentric rotating circular cylinders. Hacet. J. Math. Stat. 2019, 48, 372–383. [Google Scholar] [CrossRef]
- Tao, L.N. Magneto hydrodynamic effects on the formation of Couette flow. J. Aerospace Sci. 1960, 27, 334–338. [Google Scholar] [CrossRef]
- Katagiri, M. Flow formation in Couette motion in magneto hydrodynamics. Phys. Soc. Jpn. 1962, 17, 393–396. [Google Scholar] [CrossRef]
- Zahid, M.; Rana, M.A.; Haroom, T.; Siddiqui, A.M. Applications of Sumudu transform to MHD flows of an Oldroyd-B fluid. Appl. Math. Sci. 2013, 7, 7027–7036. [Google Scholar] [CrossRef]
- Ghos, A.K.; Datta, S.K.; Sen, P. On hydromagnetic flow of an Oldroyd-B fluid between two oscillating plates. Int. J. Appl. Comput. Math. 2016, 2, 365–386. [Google Scholar] [CrossRef]
- Hayat, T.; Hutter, K.; Asghar, S.; Siddiqui, A.M. MHD Flows of an Oldroyd-B Fluid. Math. Comput. Model. 2002, 36, 987–995. [Google Scholar] [CrossRef]
- Hayat, T.; Hussain, M.; Khan, M. Hall effect on flows of an Oldroyd-B fluid through porous medium for cylindrical geometries. Comput. Math. Appl. 2006, 52, 269–282. [Google Scholar] [CrossRef]
- Hamza, S.E.E. MHD flow of an Oldroyd-B fluid through porous medium in a circular channel under the effect of time dependent pressure gradient. Am. J. Fluid Dyn. 2017, 7, 1–11. [Google Scholar] [CrossRef]
- Mohammed, G.G.; Salih, A.W. Impacts of porous medium on unsteady helical flows of generalized Oldroyd-B fluid with two infinite coaxial circular cylinders. Iraqi J. Sci. 2021, 62, 1686–1694. [Google Scholar] [CrossRef]
- Ahadi, F.; Biglari, M.; Azadi, M.; Bodaghi, M. Computational fluid dynamics of coronary arteries with implanted stents: Effects of newtonian and non-newtonian blood flows. Eng. Rep. 2024, 6, e12779. [Google Scholar] [CrossRef]
- Rossow, V.J. On flow of electrically conducting fluids over a flat plate in the presence of a transverse magnetic field. NACA TN Tech. Rep. 1957, 3971, 489–508. [Google Scholar]
- Sneddon, I.N. Functional Analysis. In Encyclopedia of Physics/Handbuch der Physik; Flügge, S., Ed.; Springer: Berlin/Göttingen/Heidelberg, Germany, 1955; Volume 1/2. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Step Is 0.05 | |||||
|---|---|---|---|---|---|
| Analytical | Numerical | Analytical | Numerical | Analytical | Numerical |
| 0.189 | 0.189 | 0.242 | 0.242 | 0.293 | 0.293 |
| 0.190 | 0.190 | 0.242 | 0.242 | 0.293 | 0.293 |
| 0.191 | 0.191 | 0.244 | 0.244 | 0.296 | 0.296 |
| 0.194 | 0.194 | 0.247 | 0.247 | 0.299 | 0.299 |
| 0.198 | 0.198 | 0.252 | 0.252 | 0.303 | 0.303 |
| 0.203 | 0.204 | 0.257 | 0.257 | 0.309 | 0.309 |
| 0.210 | 0.210 | 0.264 | 0.264 | 0.317 | 0.317 |
| 0.218 | 0.218 | 0.272 | 0.272 | 0.325 | 0.325 |
| 0.227 | 0.227 | 0.282 | 0.282 | 0.335 | 0.335 |
| 0.237 | 0.237 | 0.293 | 0.293 | 0.347 | 0.347 |
| 0.249 | 0.249 | 0.305 | 0.305 | 0.360 | 0.360 |
| 0.262 | 0.262 | 0.319 | 0.319 | 0.375 | 0.375 |
| 0.276 | 0.276 | 0.335 | 0.335 | 0.391 | 0.391 |
| 0.292 | 0.292 | 0.352 | 0.352 | 0.409 | 0.409 |
| 0.310 | 0.310 | 0.370 | 0.370 | 0.428 | 0.428 |
| 0.329 | 0.329 | 0.391 | 0.391 | 0.450 | 0.450 |
| 0.350 | 0.351 | 0.413 | 0.413 | 0.473 | 0.473 |
| 0.373 | 0.373 | 0.437 | 0.437 | 0.499 | 0.499 |
| 0.398 | 0.398 | 0.464 | 0.464 | 0.526 | 0.526 |
| 0.425 | 0.425 | 0.492 | 0.492 | 0.556 | 0.556 |
| 0.454 | 0.454 | 0.522 | 0.522 | 0.588 | 0.588 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fetecau, C.; Vieru, D. Investigating Magnetohydrodynamic Motions of Oldroyd-B Fluids through a Circular Cylinder Filled with Porous Medium. Processes 2024, 12, 1354. https://doi.org/10.3390/pr12071354
Fetecau C, Vieru D. Investigating Magnetohydrodynamic Motions of Oldroyd-B Fluids through a Circular Cylinder Filled with Porous Medium. Processes. 2024; 12(7):1354. https://doi.org/10.3390/pr12071354
Chicago/Turabian StyleFetecau, Constantin, and Dumitru Vieru. 2024. "Investigating Magnetohydrodynamic Motions of Oldroyd-B Fluids through a Circular Cylinder Filled with Porous Medium" Processes 12, no. 7: 1354. https://doi.org/10.3390/pr12071354