
Numerical Simulation of Fishtail Biomimetic Groove for Dry Gas Seals
Abstract
:1. Introduction
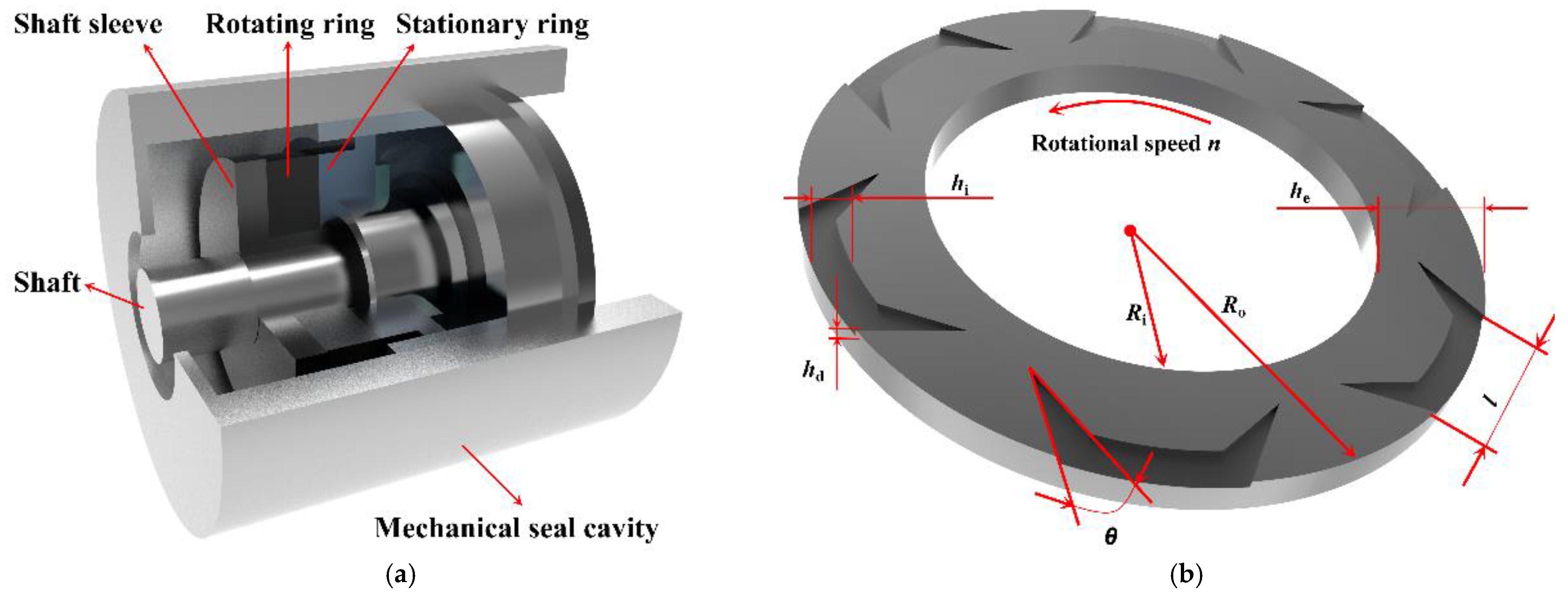
2. Computational Model
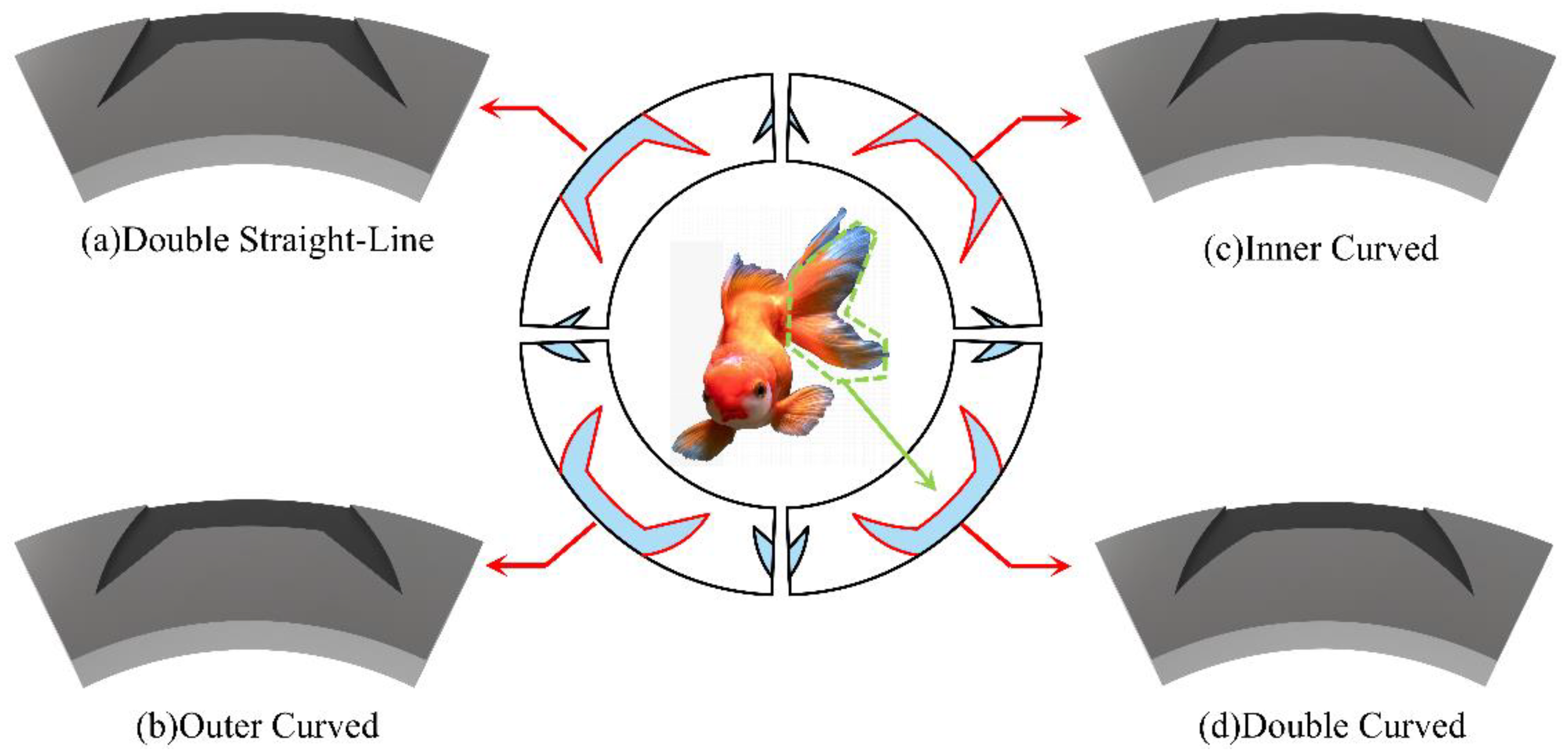
The Morphofunctionality of Fish Tails: A Key Role in Lubrication Flow
3. Governing Equation and Calculation Equations
3.1. Basic Assumptions
- The fluid is a uniform and consistently distributed medium.
- There is no relative movement between the fluid and the sealing surface.
- The influence of fluid volumetric forces and inertial forces is insignificant.
- The sealing end-face is rigid and smooth.
3.2. Governing Equation
3.2.1. Continuity Equation
3.2.2. Momentum Equation
3.3. Sealing Performance Parameters
3.3.1. Opening Force F
3.3.2. Leakage Q
3.3.3. Film Stiffness K
3.3.4. Stiffness-to-Leakage Ratio T
4. Solution Approach and Domain
4.1. Three-Dimensional Model and Mesh Division
4.2. Boundary Condition Settings and Grid Independence Verification
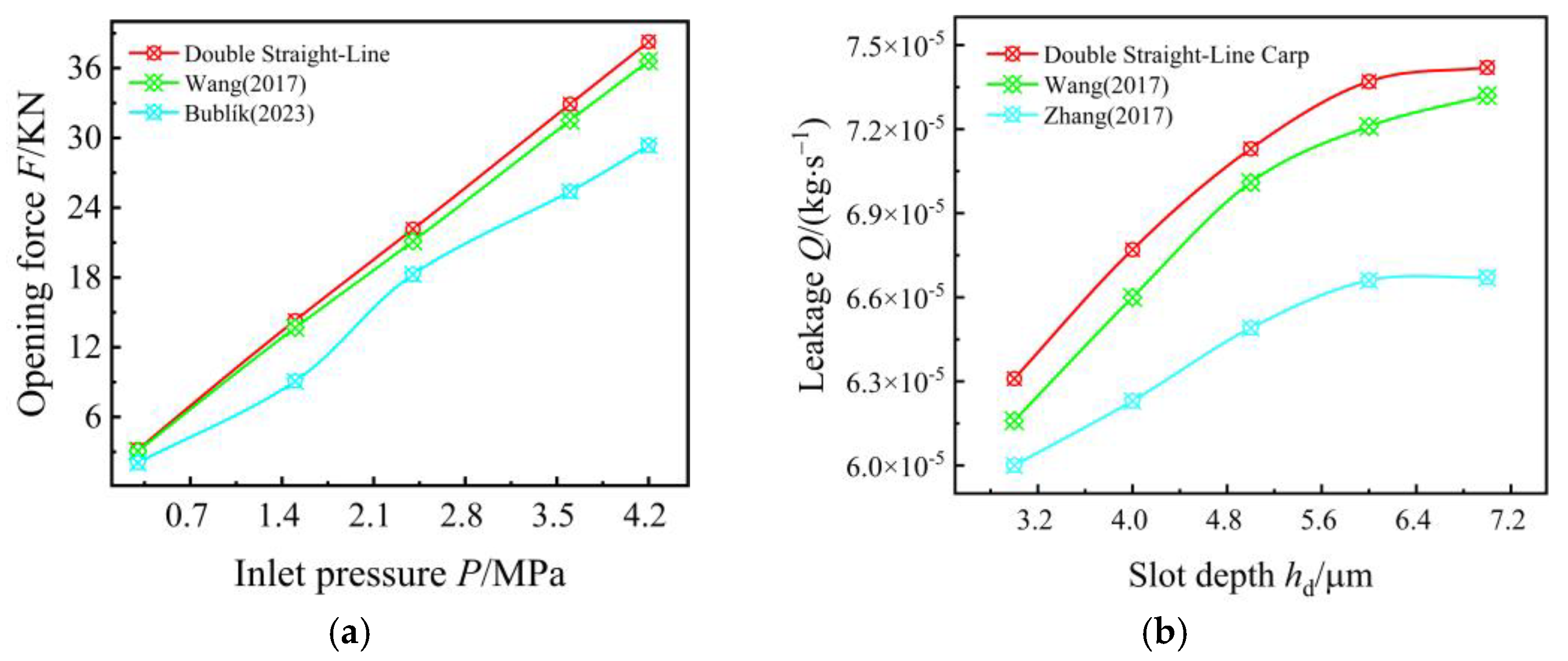
4.3. Verification of Model Correctness
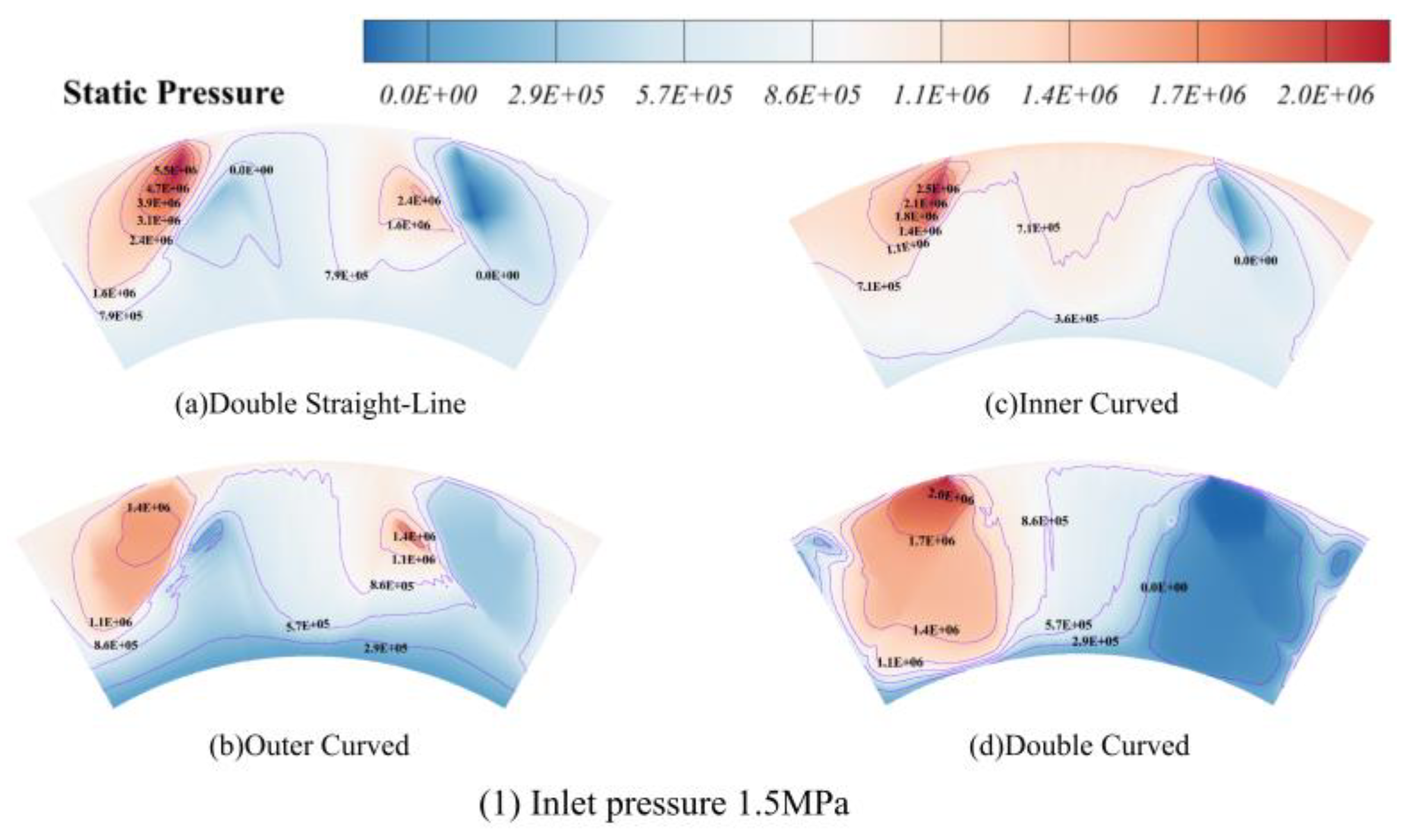
4.4. Presentation of Calculation Results
5. Results and Discussion
5.1. Effect of Operating Conditions on the Sealing Performance of Carp-Tail Grooves
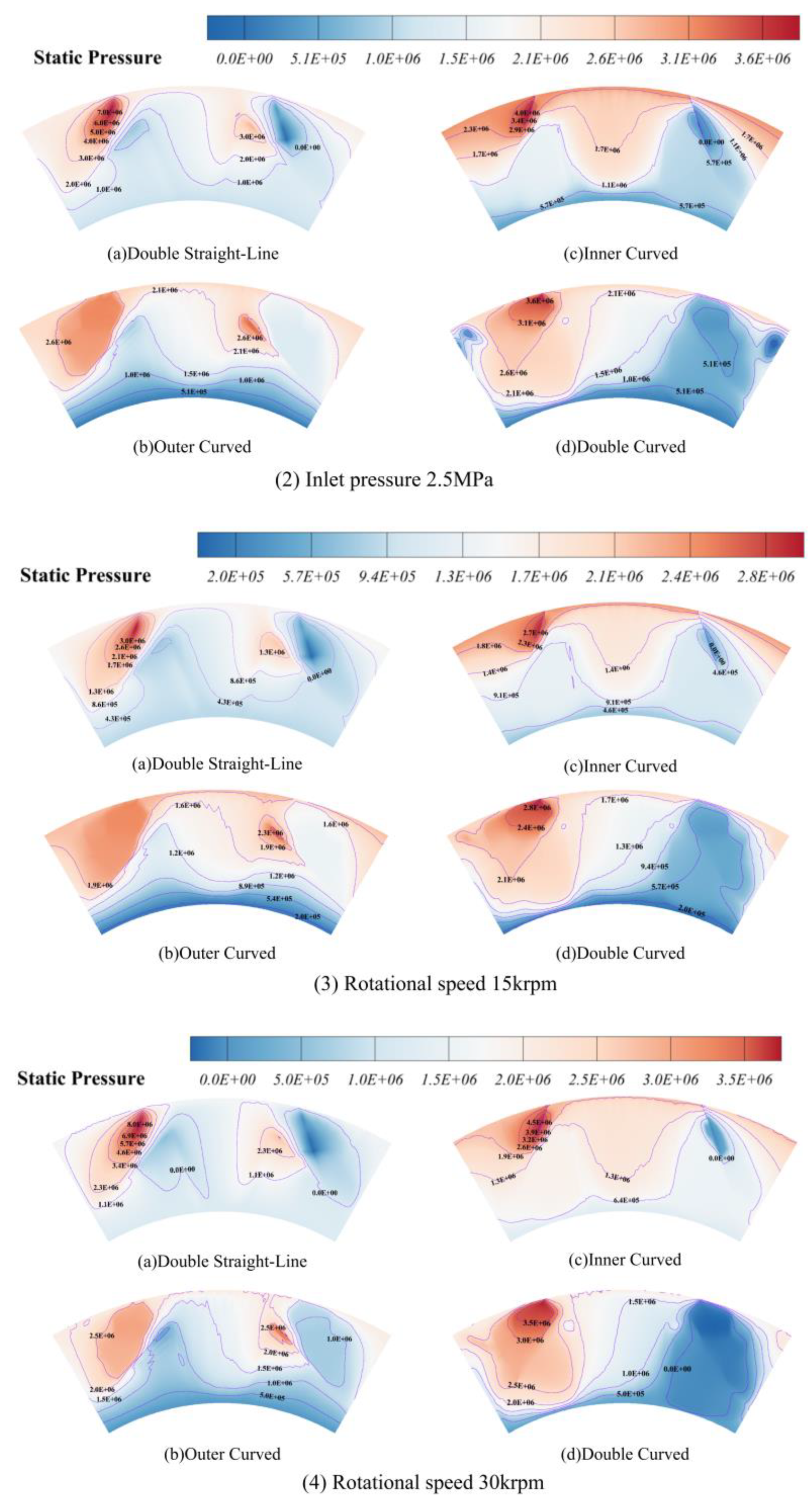
5.1.1. Effect of Inlet Pressure on the Sealing Performance of Carp-Tail Grooves
5.1.2. Effect of Rotational Speed on Carp-Tail Groove Seal Performance
5.2. Effect of Geometric Parameters on Carp-Tail Groove Seal Performance
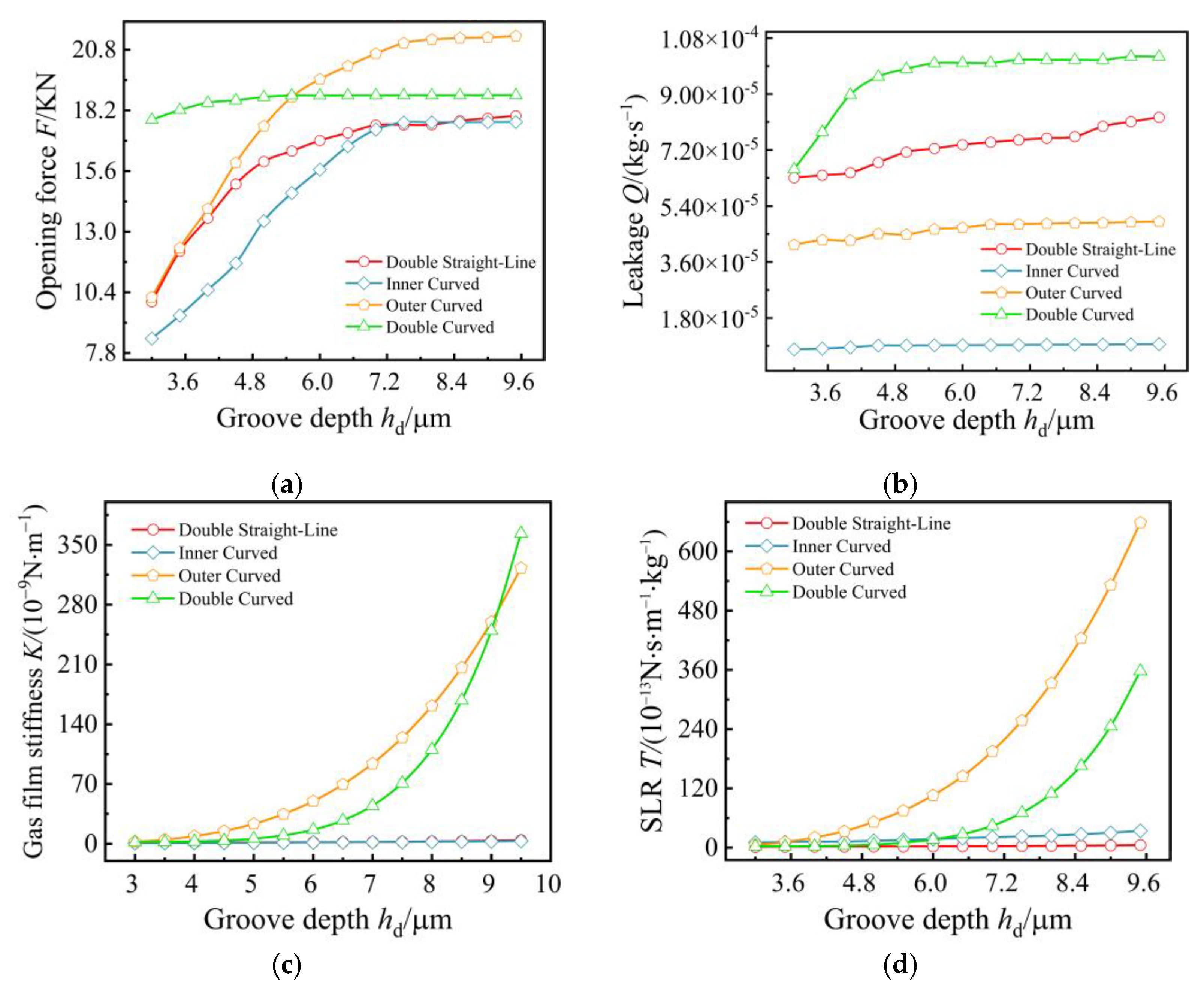
5.2.1. Influence of Groove Depth on Seal Performance
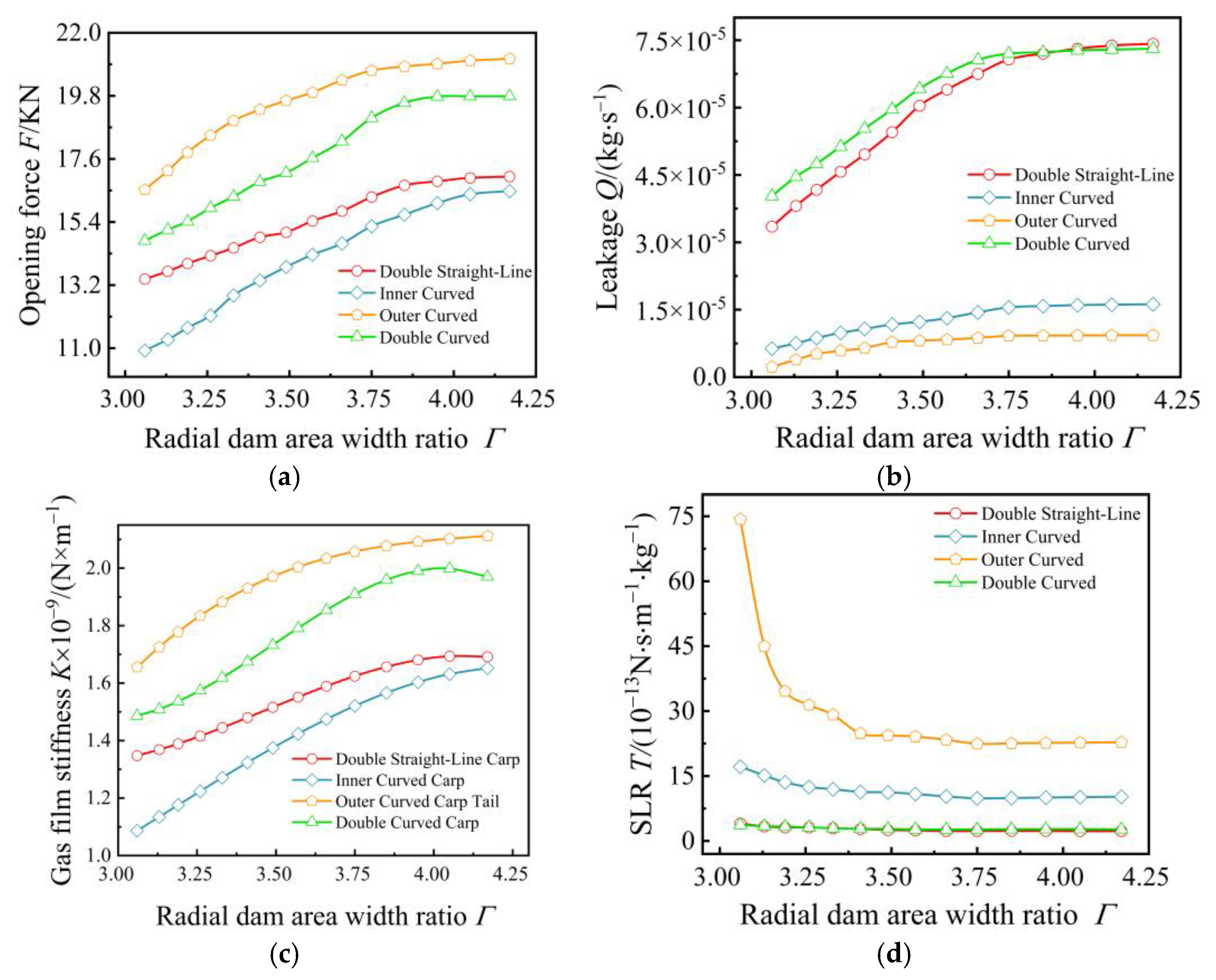
5.2.2. Effect of Radial Dam Area-Width Ratio on Seal Performance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, H.; Yue, Y.; Song, P.; Mao, W.; Deng, Q.; Sun, X. Analysis on the dynamic characteristics of spiral groove dry gas seal based on the gas film adaptive adjustment model. Ind. Lubr. Tribol. 2023, 75, 406–414. [Google Scholar] [CrossRef]
- Peng, X.D.; Zong, B.; Jiang, J.B. Progress in dry gas seal performance evolution of unidirectional spiral groove and its derivative structures. CIESC J. 2017, 68, 1271–1281. [Google Scholar]
- Deng, Q.; Sun, X.; Xu, H.; Mao, W. Thermal characteristics of dry gas seal in startup process considering microscale effects. Lubricants 2023, 11, 503. [Google Scholar] [CrossRef]
- Faria, M.T.C. An Efficient finite element procedure for analysis of high-speed spiral groove gas face seals. J. Tribol. 2001, 123, 165–169. [Google Scholar] [CrossRef]
- Yuan, T.; Yang, R.; Li, Z.; Li, J.; Yuan, Q.; Song, L. Thermal characteristics and cooling effect for S-CO2 dry gas seal with multiple dynamic groove types. Appl. Therm. Eng. 2024, 236, 121896. [Google Scholar] [CrossRef]
- Shang, H.; Chen, Y.; Li, X.; Li, Y.; Wang, B.; Peng, X. Investigation of performance and parametric optimization of the typical spiral groove dry gas seal under transient disturbance operating condition. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 76. [Google Scholar] [CrossRef]
- Zhang, C.; Jiang, J.; Zhao, W.; Jin, J.; Peng, X. A comprehensive multi-objective, multi-parameter and multi-condition optimization of a spiral groove in dry gas seals. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 206. [Google Scholar] [CrossRef]
- Xu, Q.C.; Jing, J.B.; Chen, Y.; Peng, X.D.; Wang, Y.M. Numerical analysis of steady-state and dynamic characteristics of typical molded line groove dry gas seals. Tribology 2018, 38, 584–594. [Google Scholar]
- Chen, Y.; Jiang, J.; Peng, X. Dynamic characteristics and transient sealing performance analysis of hyperelliptic curve groove dry gas seals. Tribol. Int. 2017, 116, 217–228. [Google Scholar] [CrossRef]
- Peng, X.D.; Tan, L.L.; Li, J.Y.; Sheng, S.E.; Bai, S.X. Numerical analysis of dry gas face seals with spiral groove and inner annular groove. In Proceedings of the 2008 Second International Conference on Integration and Commercialization of Micro and Nanosystems, Clear Water Bay, Kowloon, Hong Kong, 3–5 June 2008; Volume 42940, pp. 73–77. [Google Scholar]
- Shahin, I.; Gadala, M.; Alqaradawi, M.; Badr, O. Three dimensional computational study for spiral dry gas seal with constant groove depth and different tapered grooves. Procedia Eng. 2013, 68, 205–212. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, J.J.; Tao, K.; Ma, C.B.; Tu, Q.A. Numerical analysis of T-groove dry gas seal and groove optimization. Tribology 2014, 34, 420–427. [Google Scholar]
- Wang, Y.; Lu, L.; Zhang, H.; Lyu, S. A simulation analysis and experimental research on T groove end face seal under mid-and-low speed. Int. J. Precis. Eng. Manuf. 2017, 18, 537–543. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, J.; Hu, Q.; Wang, D.; Zheng, X. Orientation effect of orderly roughness microstructure on spiral groove dry gas seal. Tribol. Int. 2018, 126, 97–105. [Google Scholar]
- Li, X.; Wang, K.; Du, B. The Structure optimization of t-slots dry gas seal faces. In Proceedings of the 2016 International Conference on Advanced Materials Science and Environmental Engineering, Chiang Mai, Thailand, 26–27 June 2016. [Google Scholar]
- Sun, J.; Liu, M.; Xu, Z.; Liao, T. Research on operating parameters of T-groove cylindrical gas film seal based on computational fluid dynamics. Adv. Compos. Lett. 2019, 28, 096369351986437. [Google Scholar] [CrossRef]
- Hu, Q.; Zhu, J.M.; Wang, Y.; Tang, X.K.; Xu, W.C.; Zheng, X.Q. Performance analysis of fir tree-groove dry gas seal with radial orderly micro-structure. Adv. Eng. Sci. 2020, 52, 153–160. [Google Scholar]
- Liu, Z.X.; Zhou, Y. Numerical analysis of gas dynamic characteristics in bi-directional dry gas seal. J. Eng. Thermophys. 2013, 34, 1466–1469. [Google Scholar]
- Xu, W.; Tian, Y.; Song, Y.; Xu, Y. Bidirectional trapezoidal versus unidirectional spiral groove performance in dry gas seals. Int. J. Fluid Mach. Syst. 2021, 14, 220–228. [Google Scholar] [CrossRef]
- Gao, L. Steady simulation of T-groove and spiral groove dry gas seals. Int. J. Heat Technol. 2019, 37, 839–845. [Google Scholar] [CrossRef]
- Jiang, J.B.; Peng, X.D.; Bai, S.X.; Li, J.Y.; Chen, Y. Performance analysis and selection of a bionic birdwing multi-array spiral groove dry gas seal. Tribology 2015, 35, 274–281. [Google Scholar]
- Jiang, J.; Peng, X.; Li, J.; Chen, Y. A comparative study on the performance of typical types of bionic groove dry gas seal based on bird wing. J. Bionic Eng. 2016, 13, 324–334. [Google Scholar] [CrossRef]
- Sachs, G.; Moelyadi, M.A. CFD based determination of aerodynamic effects on birds with extremely large dihedral. J. Bionic Eng. 2010, 7, 95–101. [Google Scholar] [CrossRef]
- Quinn, S.; Gaughran, W. Bionics-an inspiration for intelligent manufacturing and engineering. Robot. Comput.-Integr. Manuf. 2010, 26, 616–621. [Google Scholar] [CrossRef]
- Wang, Y.; Ge, Y.; Huang, G.; Hu, Q.; Hu, P. Microscale flow field analysis and flow prediction model exploration of dry gas seal. IEEE Access 2020, 8, 52663–52675. [Google Scholar] [CrossRef]
- Saleh, M.S.M.; Mekroussi, S.; Kherris, S.; Boutera, Y.; Bouzaher, M.T.; Belghar, N.; Chamkha, A.J.; Kolsi, L. Effect of rotating cylinder on nanofluid heat transfer in a bifurcating grooved channel equipped with porous layers. Int. J. Mod. Phys. B 2023, 37, 2350289. [Google Scholar] [CrossRef]
- Li, Z.; Wang, C.; Li, L.; Wu, J.; Yin, Z.; Tan, D. Numerical investigation of mesoscale multiphase mass transport mechanism in fibrous porous media. Eng. Appl. Comput. Fluid Mech. 2024, 18, 2363246. [Google Scholar] [CrossRef]
- Li, L.; Xu, P.; Xu, W.; Lu, B.; Wang, C.; Tan, D. Multi-field coupling vibration patterns of the multiphase sink vortex and distortion recognition method. Mech. Syst. Signal Process. 2024, 219, 111624. [Google Scholar] [CrossRef]
- Xu, J.; Peng, X.; Bai, S.; Meng, X. CFD simulation of microscale flow field in spiral groove dry gas seal. In Proceedings of the 2012 IEEE/ASME International Conference on Mechatronics & Embedded Systems & Applications, Suzhou, China, 8–10 July 2012. [Google Scholar]
- Zhang, Z.; Ding, X.; Xu, J.; Jiang, H.; Li, N.; Si, J. A study on building and testing fractal model for predicting end face wear of Aeroengine’s floating ring seal. Wear 2023, 532, 205079. [Google Scholar] [CrossRef]
- Bublík, O.; Heidler, V.; Pecka, A.; Vimmr, J. Flow-field prediction in periodic domains using a convolution neural network with hypernetwork parametrization. Int. J. Appl. Mech. 2023, 15, 2350018. [Google Scholar] [CrossRef]
- Soukkary, T.E.; Straatman, A.G. The prediction of spatially periodic flows using a finite-volume model. Int. J. Numer. Methods Fluids 2003, 41, 303–317. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, W.; Wang, Y.; Lu, L.; Lyu, S. Research on meshfree method for analyzing seal behavior of a T-DGS. Int. J. Precis. Eng. Manuf. 2017, 18, 529–536. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometric Parameters | Symbols | Values |
|---|---|---|
| Seal ring inner diameter | Ri/mm | 60 |
| Seal ring outer diameter | Ro/mm | 90 |
| Number of grooves | N | 6 |
| Film thickness | hc/μm | 10 |
| Groove depth | hd/μm | 3–9.5 |
| Groove sharp angle | θ/° | 20.73 |
| Opening width | l/mm | 40.84 |
| Radial dam area width ratio | Γ | 3.06–4.17 |
| Operating Conditions | Symbols | Values |
|---|---|---|
| Inlet pressure | P/MPa | 0.3–4.2 |
| Outlet pressure | Po/MPa | 0.1 |
| Rotational speed | n/krpm | 5–44 |
| Air density | ρ/(kg/m3) | 1.225 |
| Air dynamic viscosity | μ/(Pa·s) | 1.789 × 10−5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, B.; Ding, X.; Wang, S.; Zhang, L.; Chen, B.; Wu, B.; Wang, B. Numerical Simulation of Fishtail Biomimetic Groove for Dry Gas Seals. Processes 2024, 12, 1494. https://doi.org/10.3390/pr12071494
Cui B, Ding X, Wang S, Zhang L, Chen B, Wu B, Wang B. Numerical Simulation of Fishtail Biomimetic Groove for Dry Gas Seals. Processes. 2024; 12(7):1494. https://doi.org/10.3390/pr12071494
Chicago/Turabian StyleCui, Bowen, Xuexing Ding, Shipeng Wang, Lanxia Zhang, Boyou Chen, Baoyi Wu, and Bo Wang. 2024. "Numerical Simulation of Fishtail Biomimetic Groove for Dry Gas Seals" Processes 12, no. 7: 1494. https://doi.org/10.3390/pr12071494