
Research on Operation Optimization of Fluid Sampling in Wireline Formation Testing with Finite Volume Method

Abstract
:1. Introduction
2. Materials and Methods
2.1. Introduction of Pumping Probe
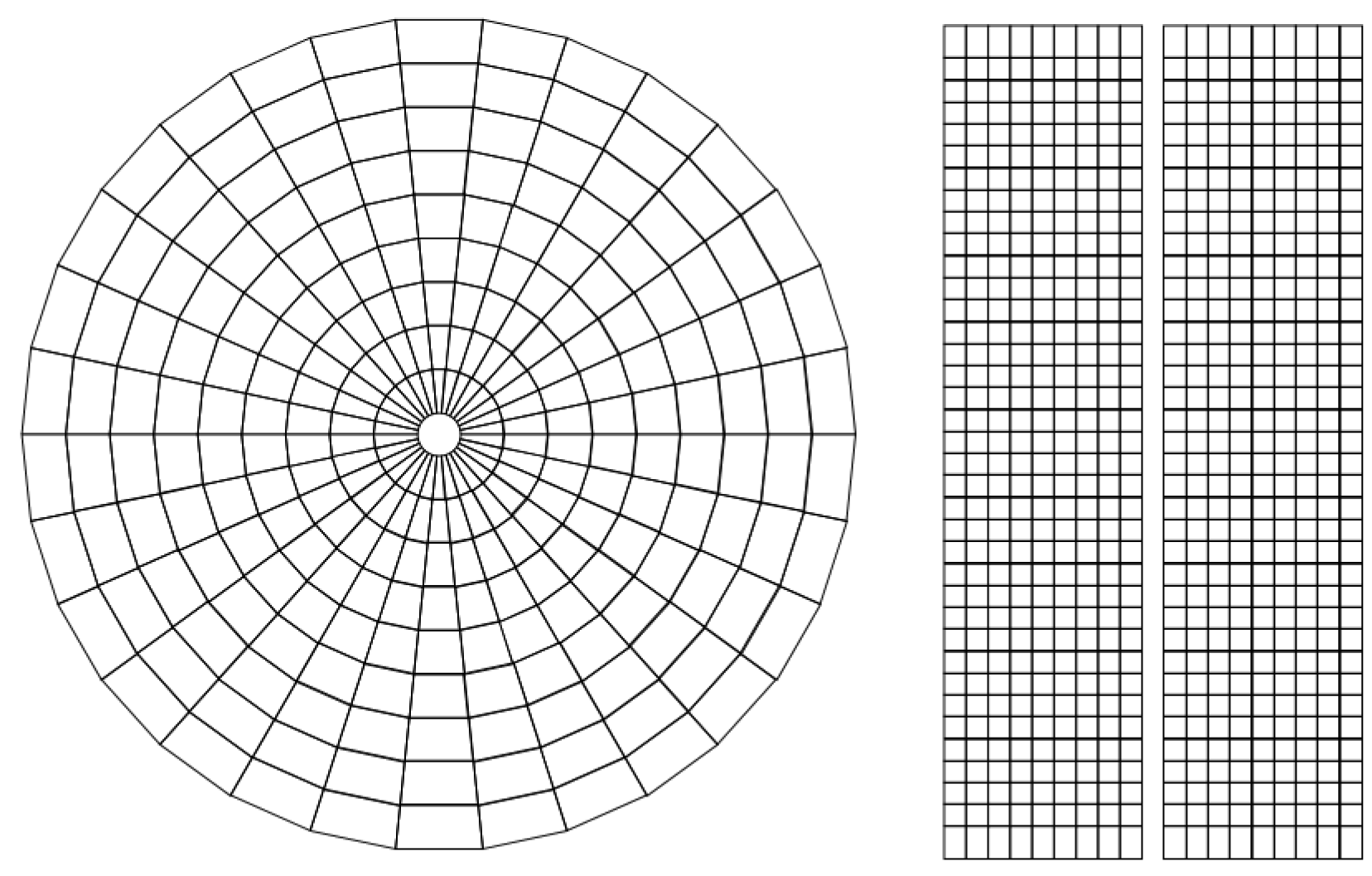
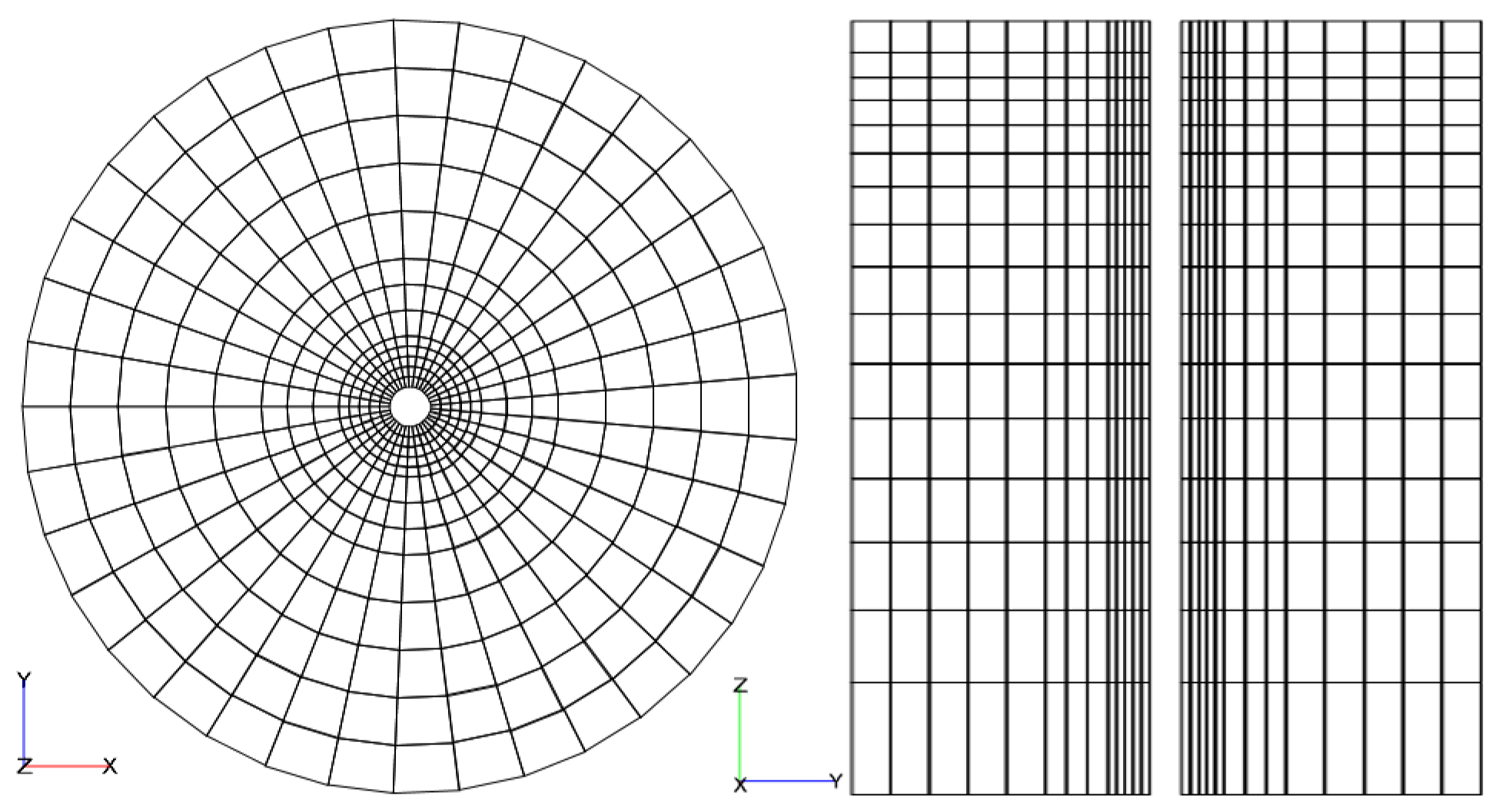
2.2. Meshing Model
2.3. Numerical Simulation Model
- (a)
- Three-Dimensional Two-Phase Black Oil Model: In this model, the invading formation mud and formation water are collectively referred to as the water phase, while the formation oil is the hydrocarbon phase. The two phases are immiscible and do not undergo chemical reactions.
- (b)
- Consideration of Various Factors: This includes the heterogeneity of the reservoir in both the horizontal and vertical planes, capillary pressure, gravity effects, rock compressibility, and fluid compressibility.
- (c)
- Boundary Conditions: The invading mud around the wellbore is water-based, and the initial invasion is an editable known condition. The outer boundary condition of the reservoir is a constant pressure boundary, while the inner boundary condition of the probe fluid sampling model is a constant liquid operation.
2.4. Target Parameter Calculation Model
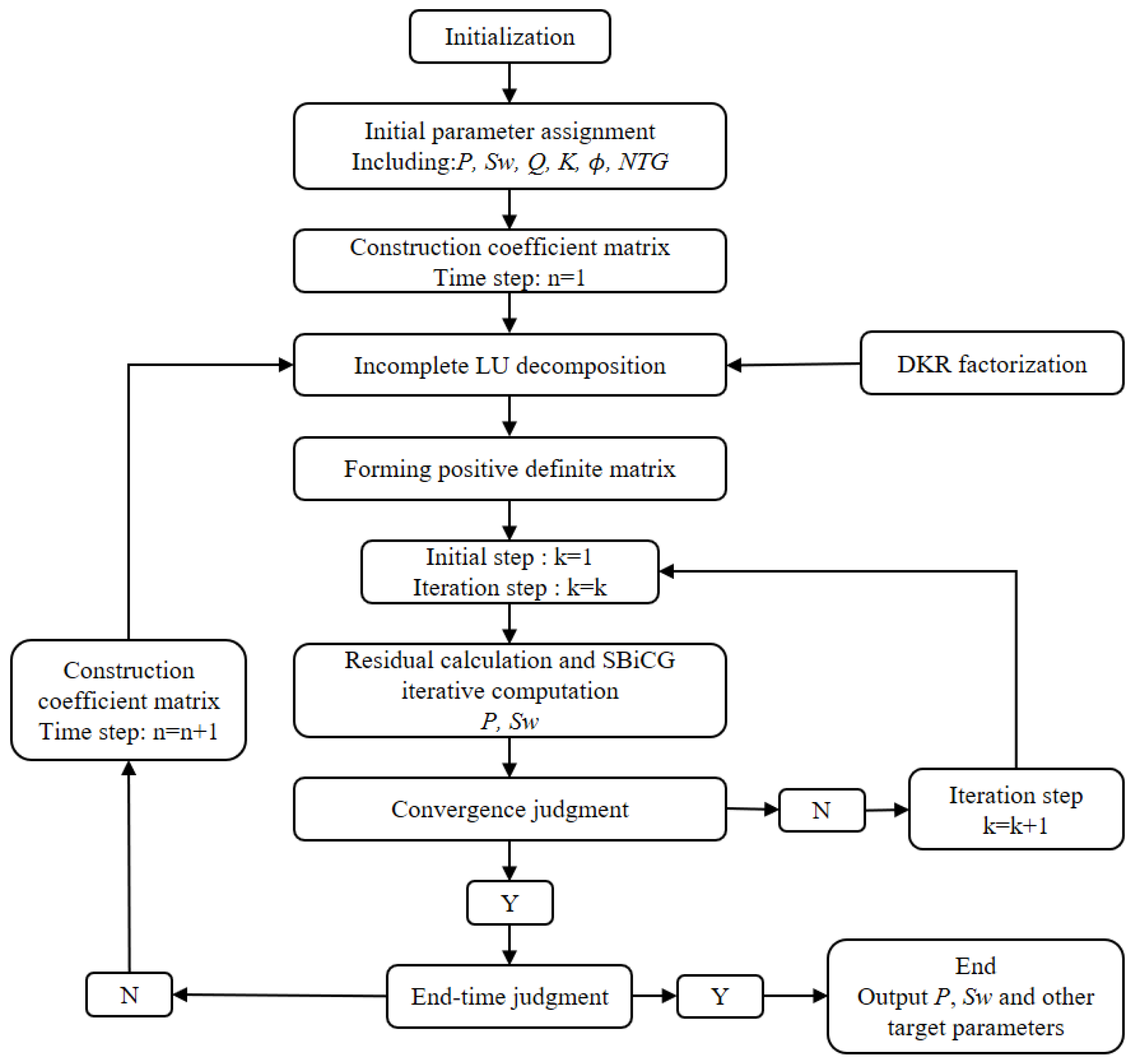
2.5. Solving Matrix Equation
2.6. Model Analysis
3. Results and Discussion
3.1. Parameter Sensitivity Analysis
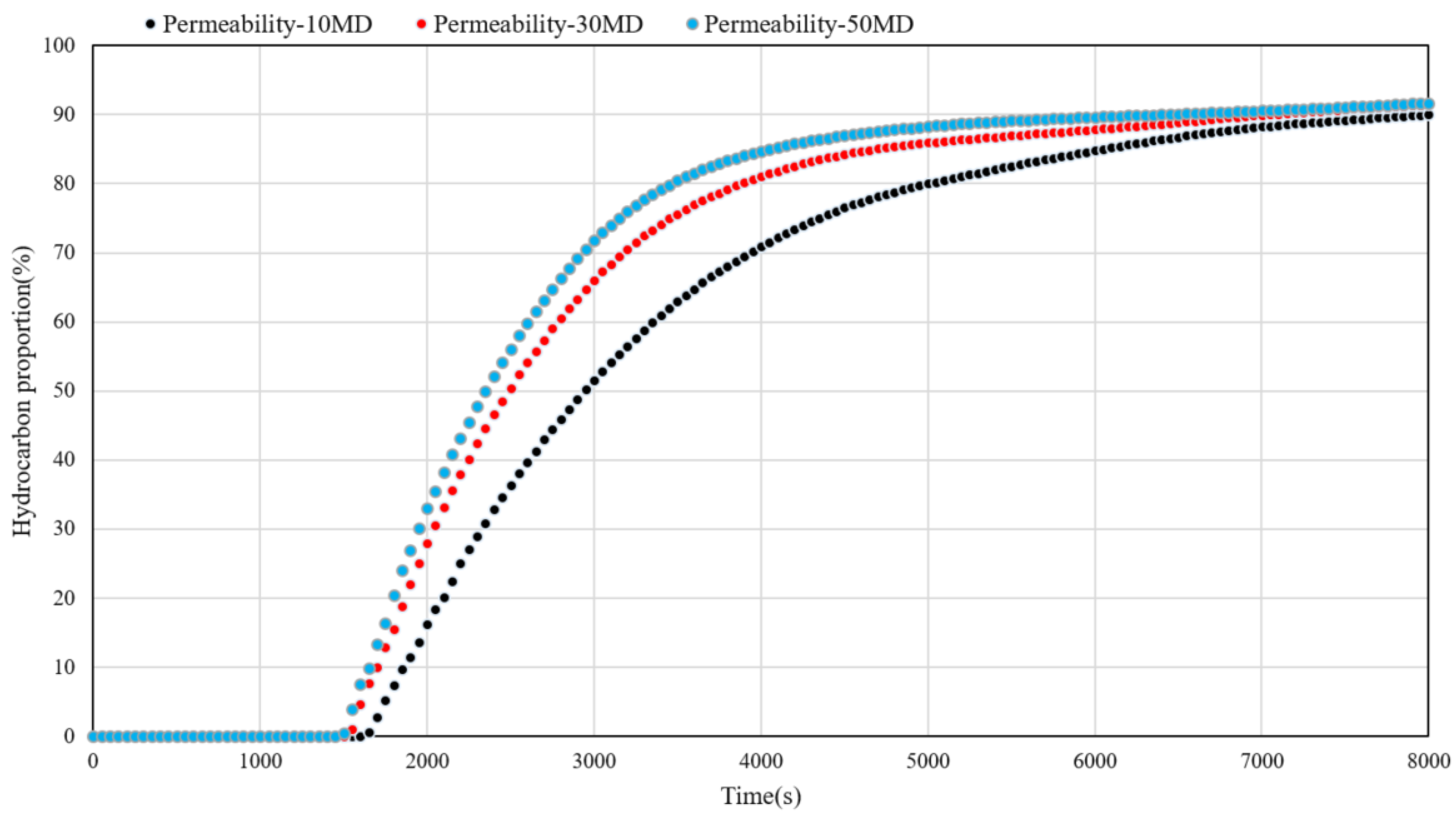
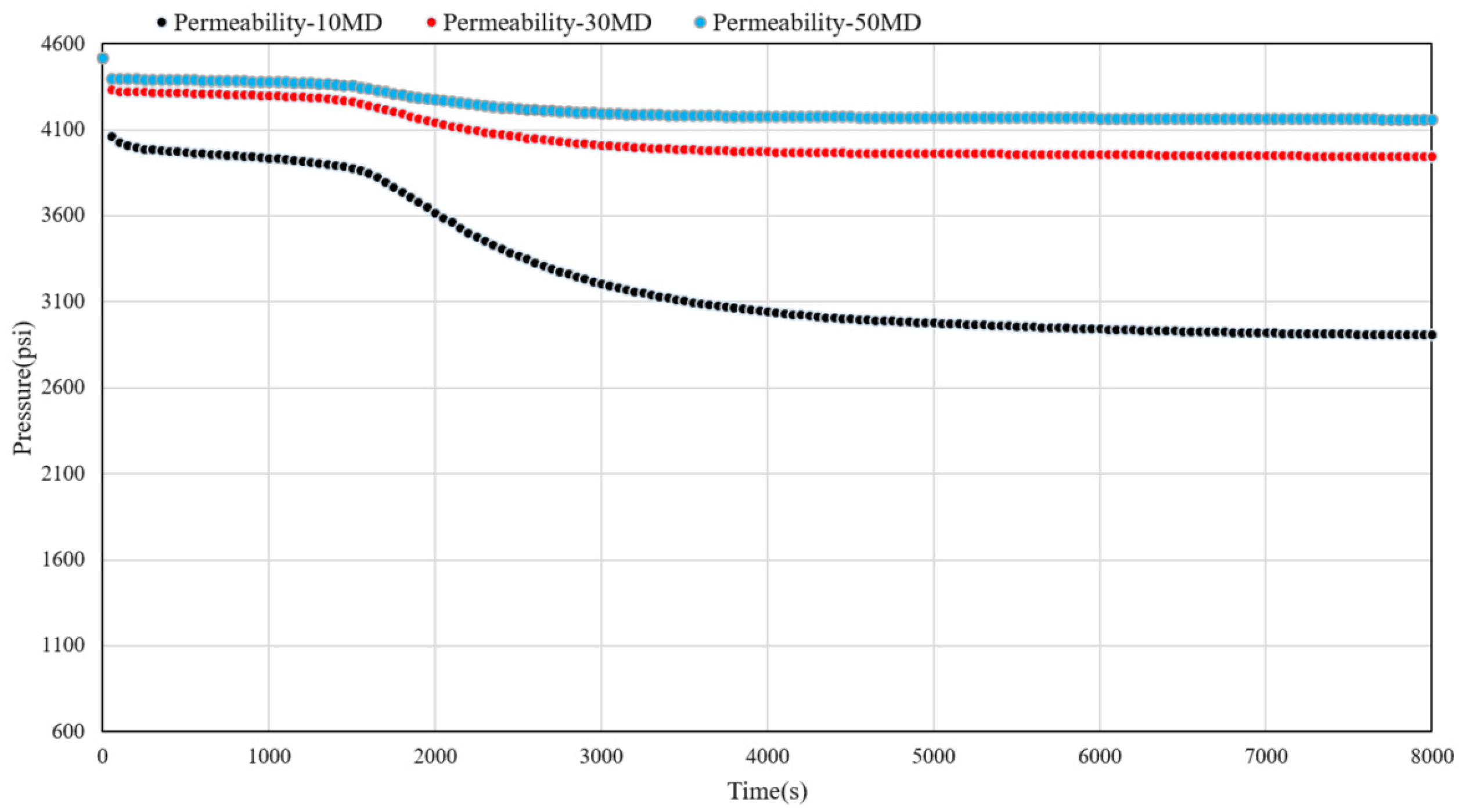
- (a)
- For elliptical probe operation at a sampling speed of 4 cc/s with permeability of 10 MD, 30 MD, and 50 MD.
- (b)
- For the same permeability of 30 MD with sampling speeds of 3 cc/s, 4 cc/s, and 5 cc/s.
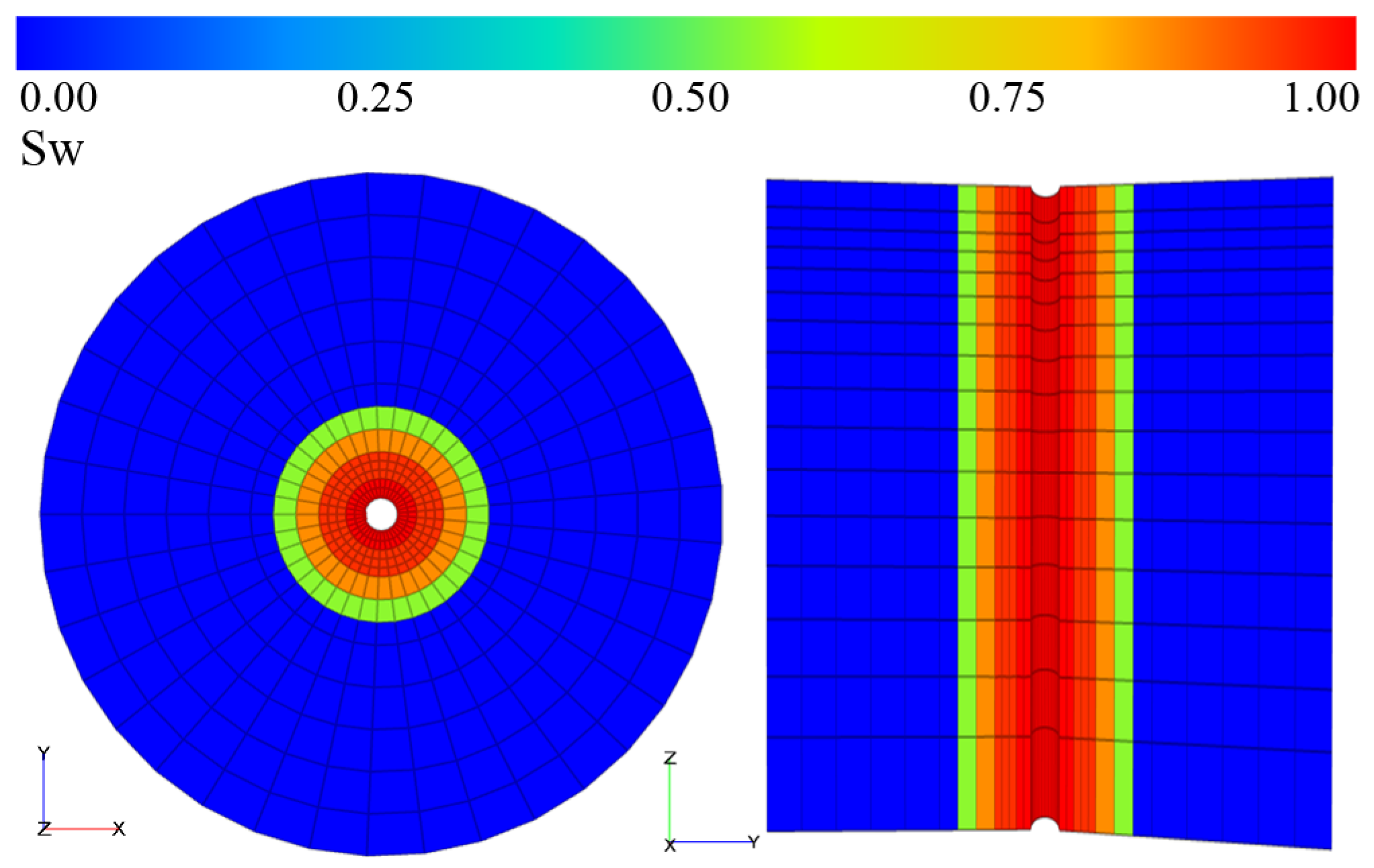
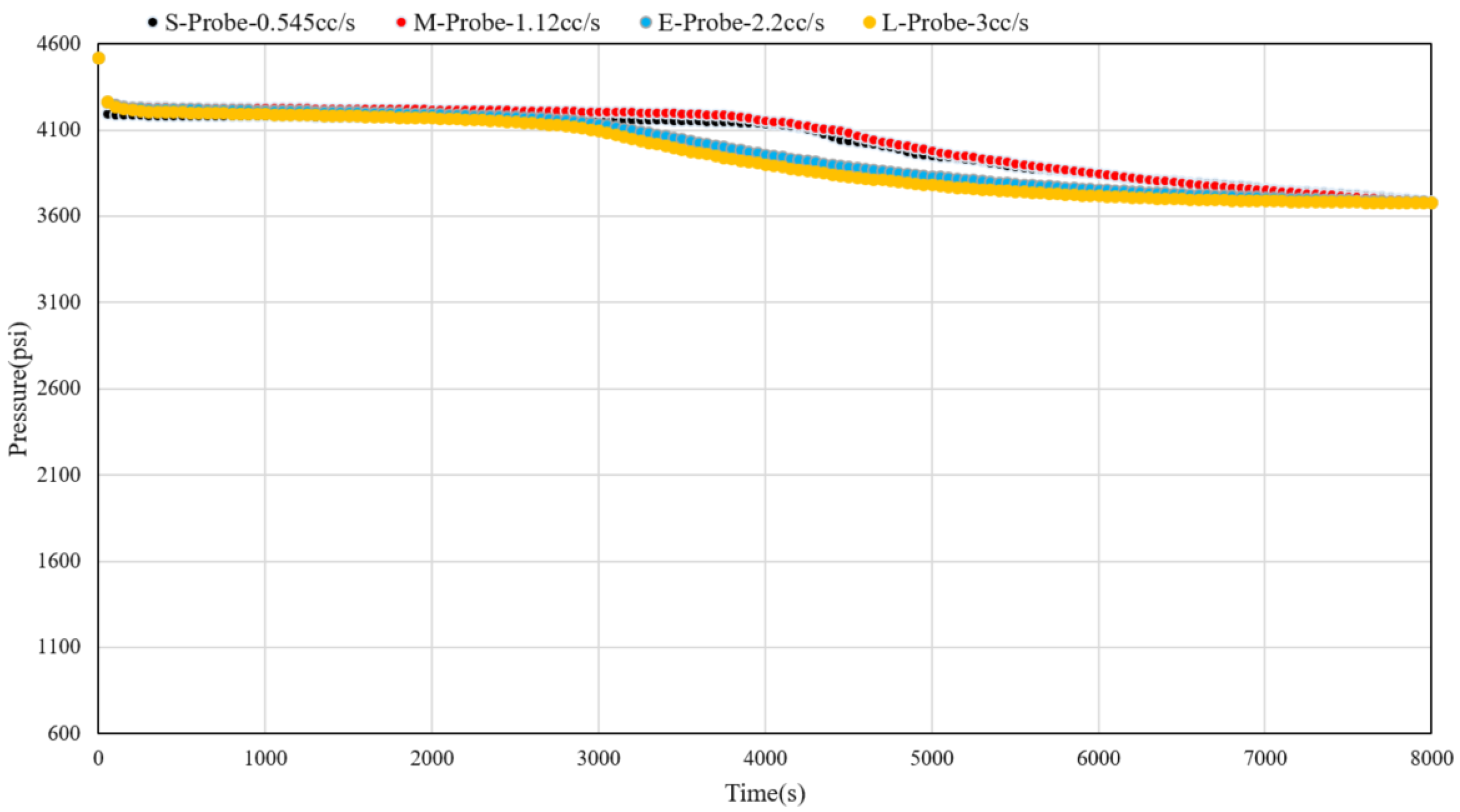
3.2. Probe Operation Analysis
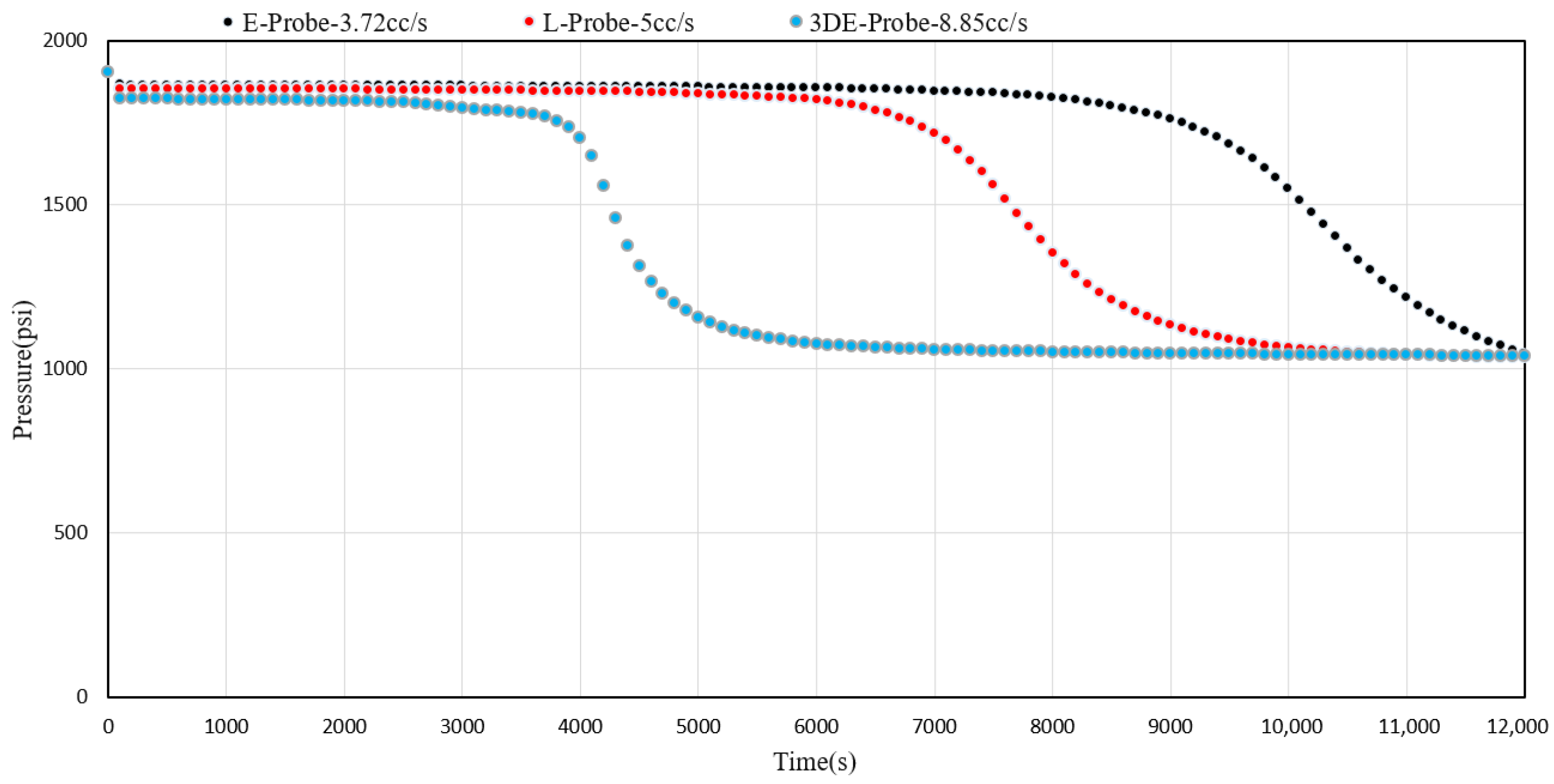
3.3. Sampling Operations in Shallow Heavy Oil Formations
4. Conclusions
- Combining the variable step-size radial grid division technique considering the wellbore radius and the probe suction mouth size, a reasonable representation of the matching between the probe suction mouth and the grid model contact area can be achieved. By adopting a variable step-size grid model, it not only represents the permeation characteristics of the formation fluid into the sampling probe in a reasonable manner, but also reduces the overall number of grid models. This approach has a positive impact on the stability and timeliness of subsequent numerical simulation calculations.
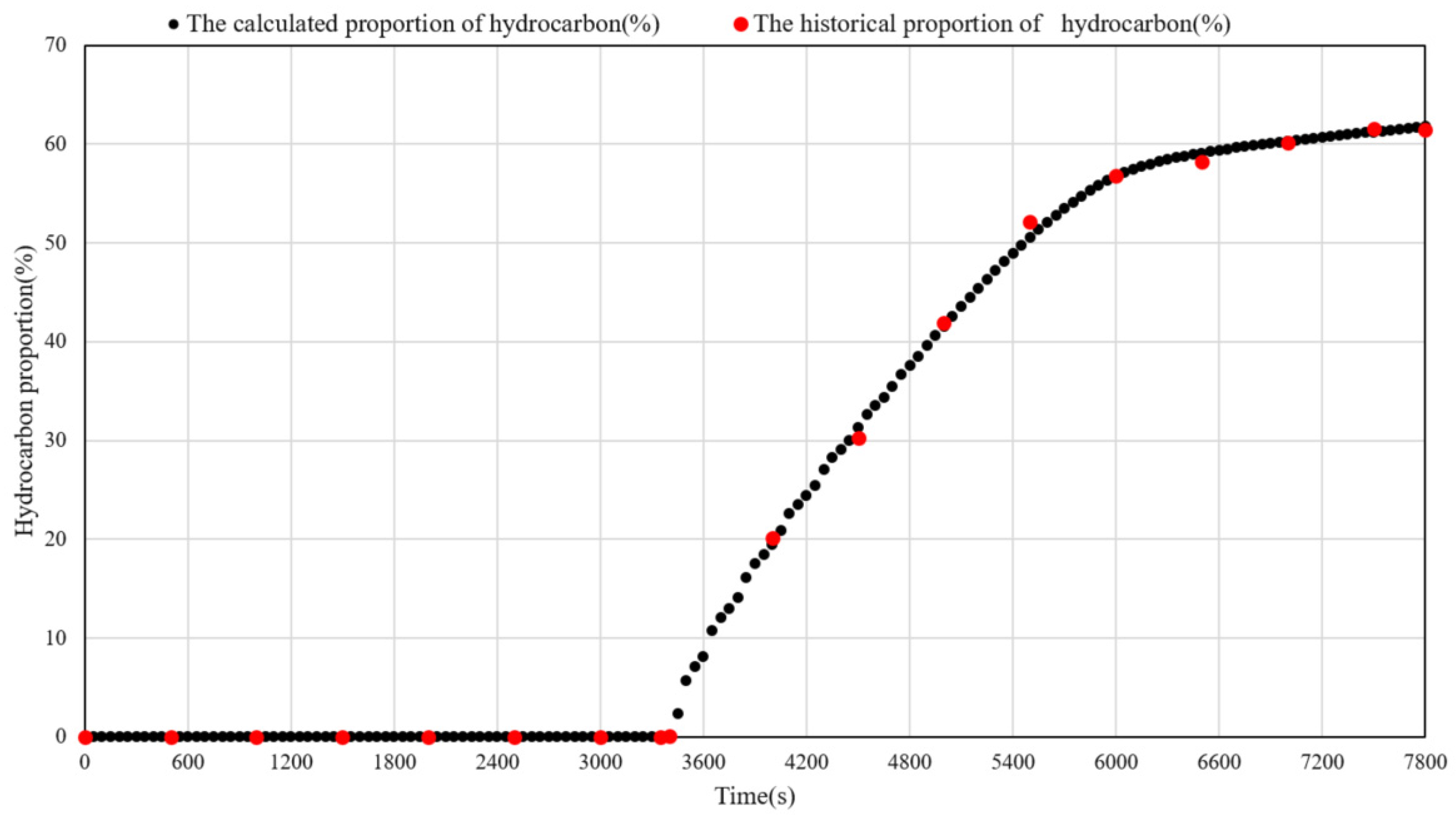
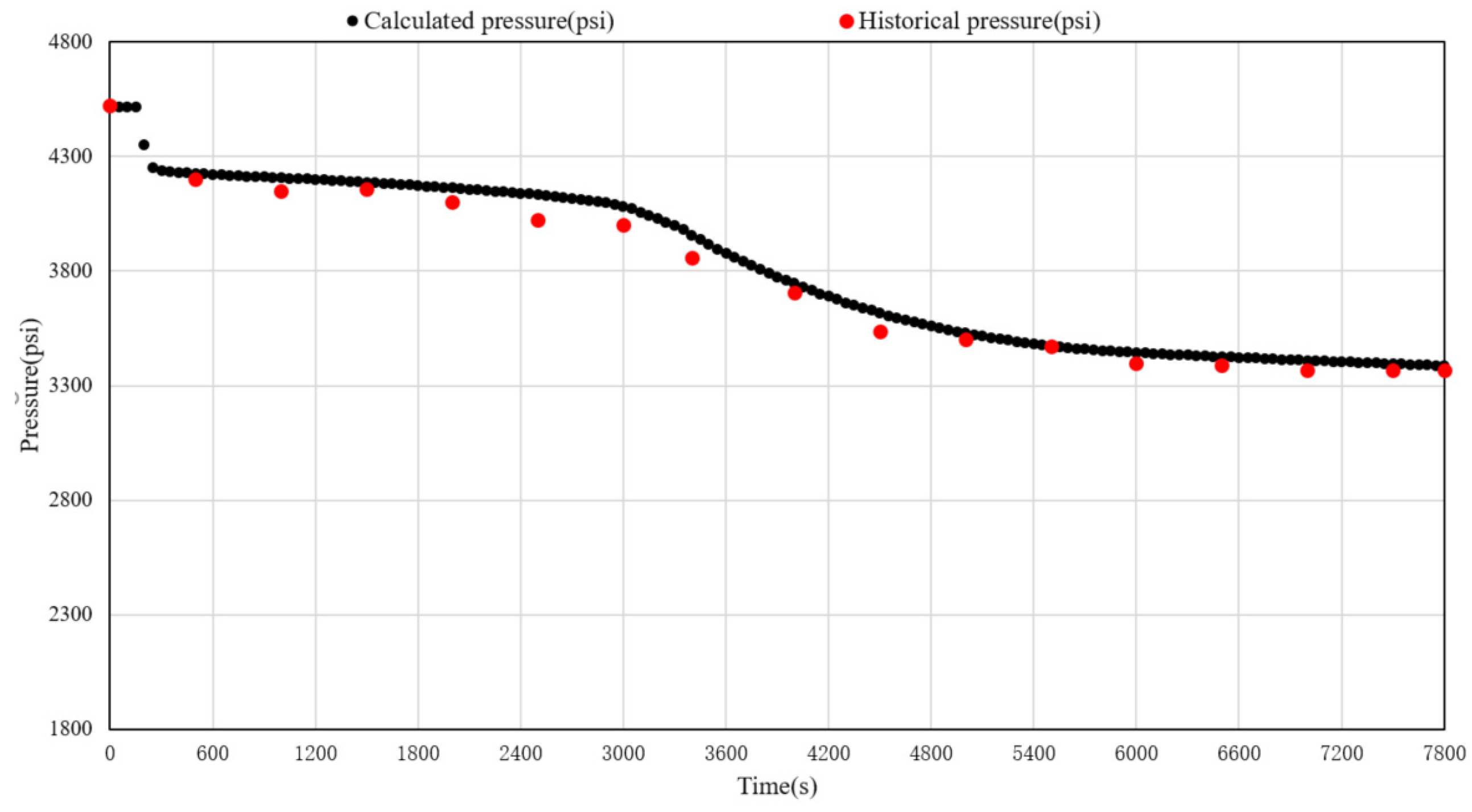
- Based on the principles of the finite volume method and considering the influence of the ratio of the probe suction area to the contact area of the geological formation grid, a numerical simulation model for fluid sampling in WFT was constructed. This model can incorporate conditions such as probe type and mud invasion. Additionally, by using incomplete LU decomposition matrix preprocessing and SBiCG, the rapid solution of model target parameters was achieved. The validation and comparison of simulated calculation results with actual sampling data were completed, providing important support for the optimization design of WFT operations during drilling processes.
- Combining the numerical simulation model, sensitivity analysis of key information such as reservoir permeability, fluid sampling speed, and probe type was conducted. This further verified the response characteristics of calculation result curves such as the hydrocarbon phase ratio and pressure in different operational measures during fluid sampling processes under various permeability, fluid sampling speed, and probe type environments. Hence, reliable bases were provided for analyzing factors affecting the efficiency of WFT fluid sampling, in conjunction with reservoir properties and fluid characteristics.
- Addressing the optimization design requirements for fluid sampling operations in shallow heavy oil sand-bearing formations, the challenges faced in environments characterized by high viscosity, high density, and high colloidal content of heavy oil reservoirs were analyzed. These challenges include difficulties such as oil sample failure to flow out of the sampling bucket, excessive pressure drop during operations, and instrument clogging due to sand production. A comparative analysis was conducted between 3D probes and traditional single-suction probes, demonstrating advantages such as increased flow area and enhanced hydrocarbon phase fluid sampling under low-pressure differential operational requirements. This approach can effectively prevent instrument clogging caused by high-pressure gradients.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbols | Meanings | Units |
| Pressure | psi | |
| Water phase saturation | - | |
| Hydrocarbon phase saturation | - | |
| Wellbore radius | m | |
| The effective fluid supply radius of the wellbore | m | |
| Transmissibility of the grid blocks | - | |
| Contact area of the current grid block | m2 | |
| The distance from the center of the grid block | m | |
| The effective thickness ratio | m/m | |
| Permeability | MD | |
| Probe area ratio coefficient | m2/m2 | |
| Probe inlet area | m2 | |
| Contact area of the grid block | m2 | |
| Relative permeability of the hydrocarbon phase | - | |
| Relative permeability of the water phase | - | |
| Density of the hydrocarbon phase fluid | g/cm3 | |
| Density of the water phase fluid | g/cm3 | |
| Viscosity of the hydrocarbon phase fluid | mPa·s | |
| Viscosity of the water phase fluid | mPa·s | |
| Porosity | - | |
| Grid volume | m3 | |
| The compressibility of the hydrocarbon phase fluid | bar−1 | |
| The compressibility of the water phase fluid | bar−1 | |
| The comprehensive compressibility | bar−1 | |
| The depth difference between grid blocks | m | |
| Iterative time step size | s | |
| Gravitational acceleration | m/s2 | |
| Total sampling fluid rate at the probe | cc/s | |
| Water phase fluid content ratio | - | |
| Hydrocarbon phase fluid content ratio | - | |
| The flow rate of the water phase fluid | cc/s | |
| The flow rate of the hydrocarbon phase fluid | cc/s | |
| Flowing pressure at the probe inlet | psi |
References
- John, A.; Agarwal, A.; Gaur, M.; Kothari, V. Challenges and opportunities of wireline formation testing in tight reservoirs: A case study from Barmer Basin, India. J. Pet. Explor. Prod. Technol. 2017, 7, 33–42. [Google Scholar] [CrossRef]
- Liu, H.; Wu, L.; Wang, M.; Zhang, H.; Qin, X. Calculation of depth of mud filtrate invasion based on formation sampling. J. Southwest Pet. Univ. (Sci. Technol. Ed.) 2023, 45, 97–106. [Google Scholar]
- Liu, M.; Song, Y.; Jiang, Y.; Jiao, L. Application of wireline formation tester in moderate and low permeability depleted zones. Well Logging Technol. 2023, 47, 764–771. [Google Scholar]
- Wang, X.; Zhou, C.; Wang, C.; Cao, W. Review on application of the wireline formation tester. Prog. Geophys. 2008, 23, 1579–1585. [Google Scholar]
- Zhou, B.; Mo, X.; Tao, G. the numerical simulation of wireline formation tester with finite element method. J. Jilin Univ. Earth Sci. Ed. 2007, 37, 629–632. [Google Scholar]
- Wang, C.; Cao, W.; Wang, X. Pressure gradient computation and application of the wireline formation tester. Pet. Explor. Dev. 2008, 35, 476–481. [Google Scholar] [CrossRef]
- Alpak, F.O.; Torres-Verdín, C.; Habashy, T.M. Estimation of in-situ petrophysical properties from wireline formation tester and induction logging measurements: A joint inversion approach. J. Pet. Sci. Eng. 2008, 63, 1–17. [Google Scholar] [CrossRef]
- Noirot, M.; Massonnat, G.; Jourde, H. On the use of Wireline Formation Testing (WFT) data: 2. Consequences of permeability anisotropy and heterogeneity on the WFT responses inferred flow modeling. J. Pet. Sci. Eng. 2015, 133, 776–784. [Google Scholar] [CrossRef]
- Zhao, Y.; Ge, S.; Han, C.; Bie, K.; Shuai, S. Oil-gas sampling purity prediction based on numerical simulation for modular dynamic formation tester. Well Logging Technol. 2020, 44, 534–538, 552. [Google Scholar]
- Zhou, Q.; Wu, L.; Qin, X. Applicable conditions of wireline formation testing instrument. Pet. Geol. Eng. 2022, 36, 115–118. [Google Scholar]
- Xu, J.; Lv, H.; Cui, Y. An application analysis of wireline formation test in Bohai region. China Offshore Oil Gas 2008, 20, 106–110. [Google Scholar]
- Ma, J. Application of EFDT in sand producing formation sampling. China Pet. Chem. Stand. Qual. 2019, 39, 53–54. [Google Scholar]
- Zhao, C. Sampling probe optimization technology of the double hanging instrument for Wireline Formation Testing. Offshore Oil 2022, 42, 59–64. [Google Scholar]
- Wu, L.; Liu, H.; Wang, M. Research on EFDT working system optimization and applicability. Petrochem. Technol. 2019, 26, 342–343. [Google Scholar]
- Anderson, J.T.; Williams, D.M.; Corrigan, A. Surface and hypersurface meshing techniques for space–time finite element method. Comput.-Aided Des. 2023, 163, 103574. [Google Scholar] [CrossRef]
- Busto, S.; Dumbser, M.; Río-Martín, L. An Arbitrary-Lagrangian-Eulerian hybrid finite volume/finite element method on moving unstructured meshes for the Navier-Stokes equations. Appl. Math. Comput. 2023, 437, 127539. [Google Scholar] [CrossRef]
- Van der Vegt, J.J.; Van der Ven, H. Space–time discontinuous Galerkin finite element method with dynamic grid motion for inviscid compressible flows. J. Comput. Phys. 2002, 182, 546–585. [Google Scholar] [CrossRef]
- Riemslagh, K.; Vierendeels, J.; Dick, E. Arbitrary Lagrangian-Eulerian finite-volume method for the simulation of rotary displacement pump flow. Appl. Numer. Math. 2000, 32, 419–433. [Google Scholar] [CrossRef]
- Lv, X.; Huang, C.; Zhao, J. Numerical simulation of water flooding development of heterogeneous carbonate reservoir. J. Xi’an Shiyou Univ. (Nat. Sci. Ed.) 2016, 31, 75–81. [Google Scholar]
- Van der Vorst, H.A. Bi-CGSTAB: A fast and smoothly converging variant of Bi-CG for the solution of nonsymmetric linear systems. SIAM J. Sci. Stat. Comput. 1992, 13, 631–644. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Name | Inlet Area (in2) | Standard Ratio |
|---|---|---|---|
| S | Small Type Inlet Probe | 0.21 | 0.27 |
| M | Middle Type Inlet Probe | 0.79 | 1 |
| E | Ellipse Type Inlet Probe | 2.32 | 2.94 |
| L | Large Type Inlet Probe | 6.23 | 7.89 |
| 3D-E | 3D-Ellipse Type Inlet Probe | 2.32 × 3 | 2.94 × 3 |
| Porosity (%) | Permeability (MD) | Hole Diameter (m) | Initial Pressure (psi) | Invasion Depth (m) | Ratio of Effective Thickness (m/m) |
|---|---|---|---|---|---|
| 15.7 | 25 | 0.1556 | 4520.95 | 0.85 | 0.912 |
| Drilling Fluid Viscosity (mPa·s) | Formation Fluid Viscosity (mPa·s) | Drilling Fluid Density (g/cm3) | Formation Fluid Density (g/cm3) |
|---|---|---|---|
| 0.55 | 2.50 | 1.01 | 0.903 |
| Water Saturation (%) | Hydrocarbon Relative Permeability (-) | Water Relative Permeability (-) |
|---|---|---|
| 0 | 1 | 0 |
| 32 | 0.88 | 0 |
| 35 | 0.82 | 0.01 |
| 45 | 0.50 | 0.12 |
| 52 | 0.30 | 0.25 |
| 60 | 0.10 | 0.48 |
| 65 | 0.02 | 0.61 |
| 70 | 0.01 | 0.71 |
| 80 | 0 | 0.88 |
| Sampling Speed (cc/s) | Operating Time Hydrocarbon > 0.4% (s) | Operating Time Hydrocarbon > 80% (s) | |
|---|---|---|---|
| E-Probe | 3.72 | 7800 | 11,900 |
| L-Probe | 5.00 | 6000 | 8800 |
| 3D-E-Probe | 8.85 | 3700 | 4900 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Wang, J.; Liu, H.; Huang, R.; Xie, H.; Li, X.; Li, X.; Liu, J.; Zhao, C. Research on Operation Optimization of Fluid Sampling in Wireline Formation Testing with Finite Volume Method. Processes 2024, 12, 1515. https://doi.org/10.3390/pr12071515
Wu L, Wang J, Liu H, Huang R, Xie H, Li X, Li X, Liu J, Zhao C. Research on Operation Optimization of Fluid Sampling in Wireline Formation Testing with Finite Volume Method. Processes. 2024; 12(7):1515. https://doi.org/10.3390/pr12071515
Chicago/Turabian StyleWu, Lejun, Junhua Wang, Haibo Liu, Rui Huang, Huizhuo Xie, Xiaodong Li, Xuan Li, Jinhuan Liu, and Changjie Zhao. 2024. "Research on Operation Optimization of Fluid Sampling in Wireline Formation Testing with Finite Volume Method" Processes 12, no. 7: 1515. https://doi.org/10.3390/pr12071515