
Finite-Time Prescribed Performance Tracking Control for Unmanned Helicopter System Using Neural Network

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- A novel prescribed performance method is introduced to handle the tracking-error constraint for the UH system with unknown initial errors. Compared with the existing methods, the present work does not need complex logic judgments to deal with different initial errors. In addition, the decreasing rate and steady-state boundary can be further adjusted based on the newly designed scaled parameters. Thus, the design of the performance constraint boundary is more flexible, allowing for more accurate and faster tracking performance.
- (2)
- A novel FTNNDO with adaptive laws is designed to estimate the lump disturbances in finite time. The continuous adaptive law can estimate the upper bound of the NN approximation error and compensate for the disturbance observer without chattering and gain overestimation, thus improving the system robustness. Besides, the differential value of virtual control does not need to be accurately solved in each step, which is regarded as an unknown perturbation processed by the FTNNDO, thus avoiding additional filter compensation design in the backstepping procedure and improving the simplicity of the control system.
- (3)
- Based on FTNNDO and BLF, an improved tracking control scheme is developed, which can achieve finite-time tracking dynamics with prescribed performance for the UH system with unknown model uncertainties and external disturbances.
2. Problem Formulation and Preliminaries
2.1. Helicopter Dynamic Model
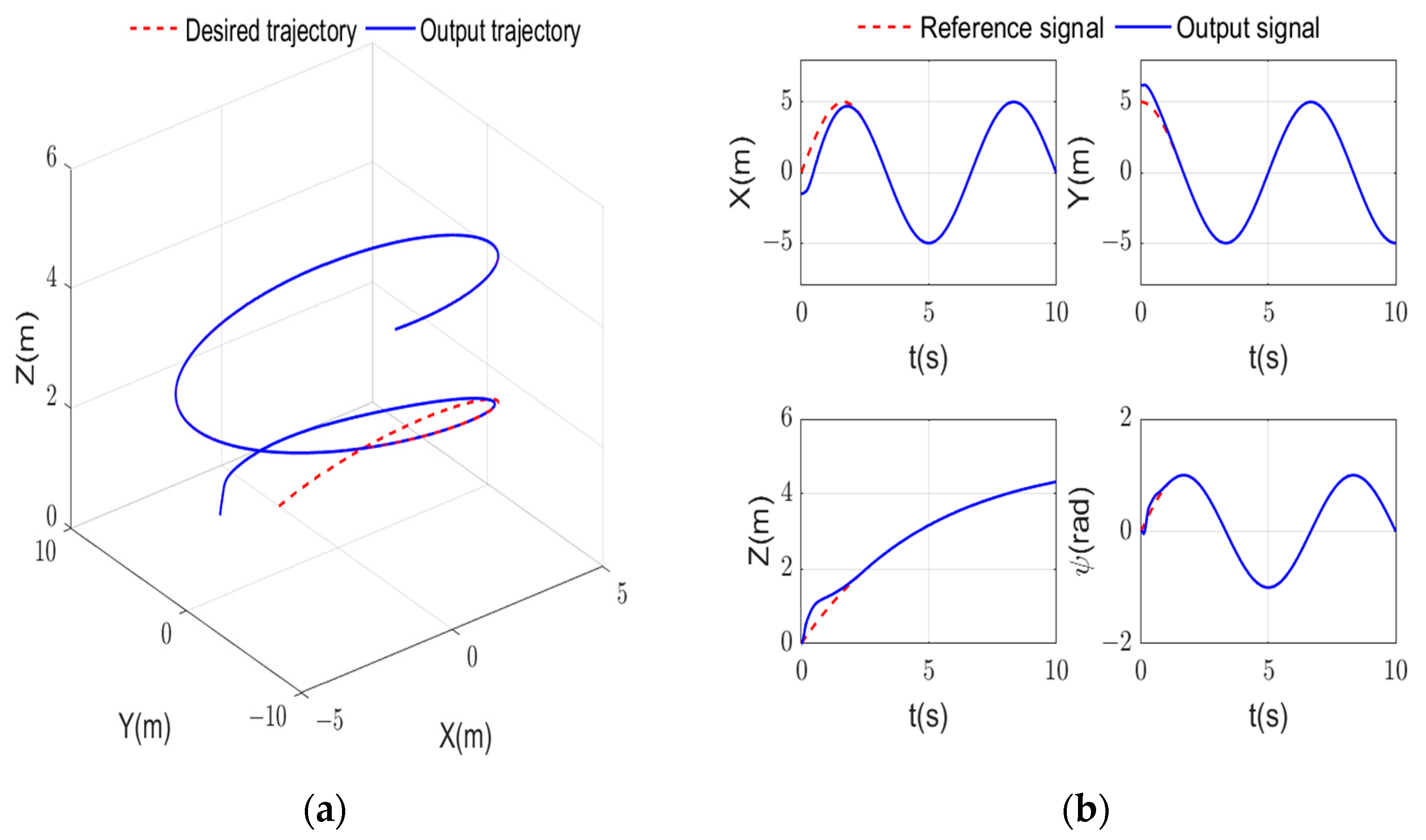
- The system outputs (, ) can track the desired trajectory (, ) in finite time, and all the closed-loop system signals are stable and bounded in finite time.
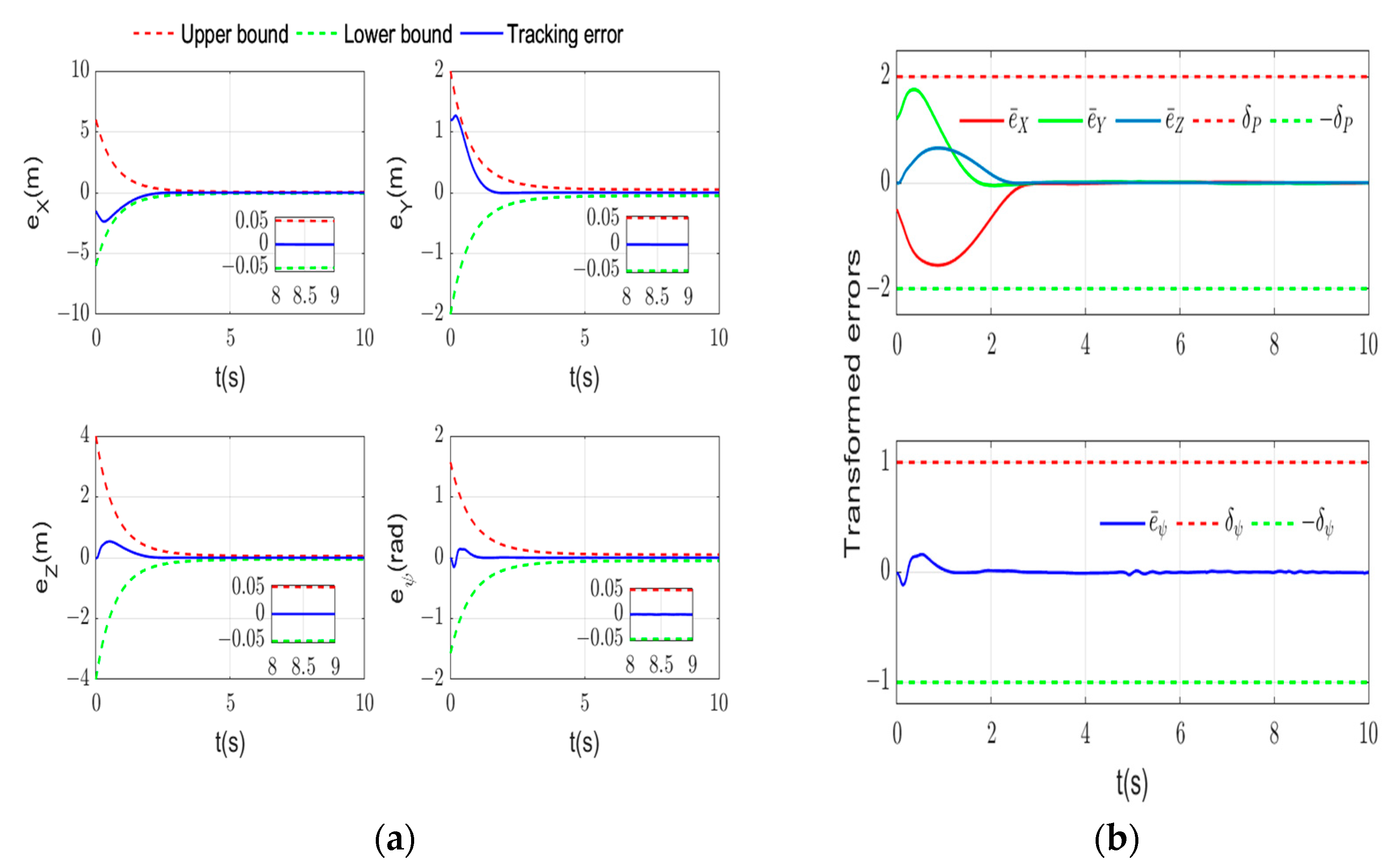
- Achieve settled transient and steady tracking error bounds on the system outputs (, ) to guarantee the prescribed performance.
2.2. Mathematical Preliminaries
- A.
- Neural networks
- B.
- Definitions and lemmas
3. Main Results and Analysis
3.1. Prescribed Performance Tracking Error Transformation
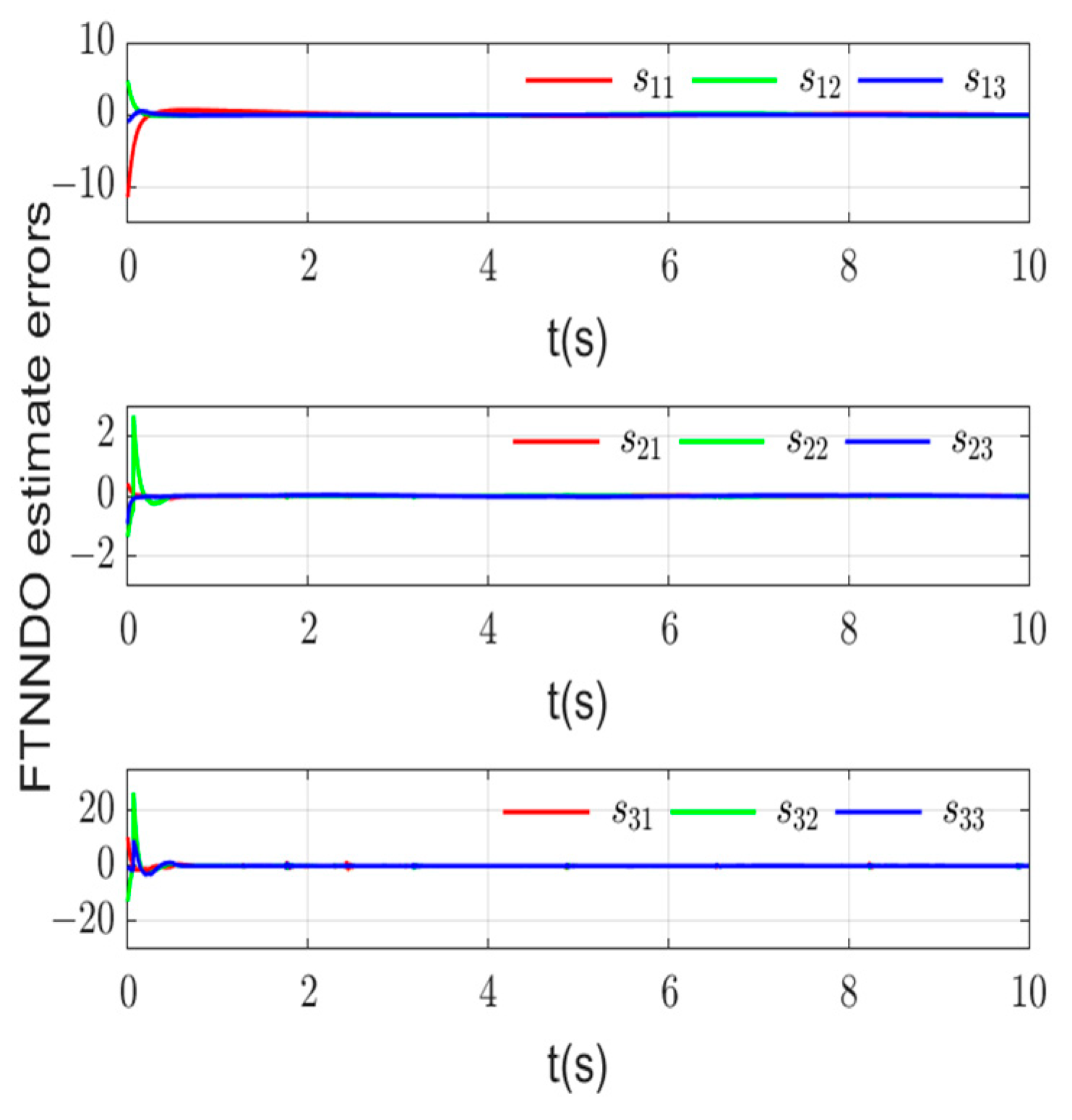
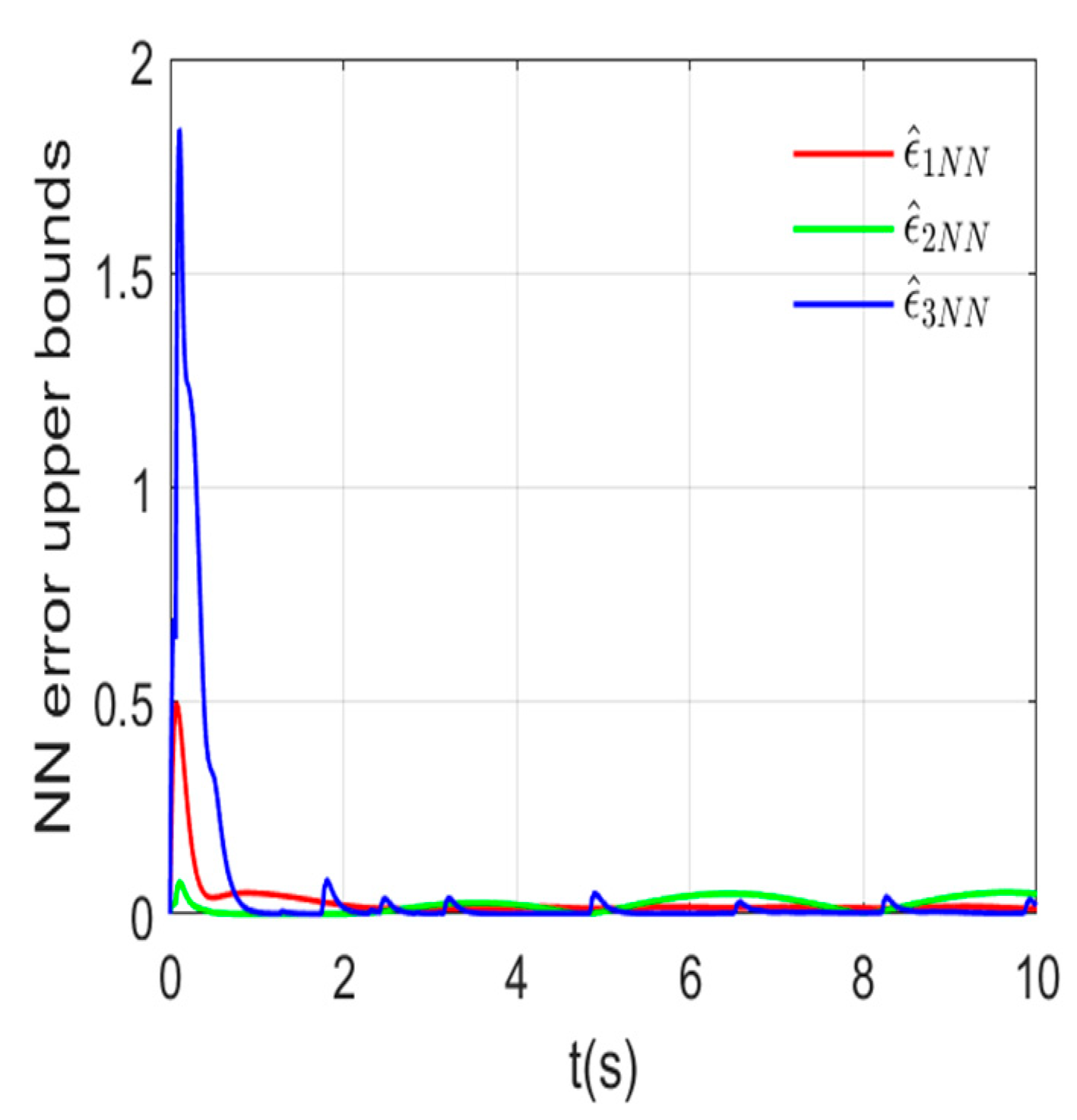
3.2. Finite-Time Neural Network Disturbance Observer Design
3.3. Finite-Time Tracking Controller Design and Stability Analysis
- Step 1: For the position tracking error dynamic in Equation (26), choose the virtual control signal as follows:
- Step 2: For the velocity tracking error dynamic in Equation (28), choose the virtual control signal as follows:
- Step 3: For the attitude error dynamic in Equation (29), choose the virtual control as follows:
- Step 4: For the angular velocity tracking error dynamic in Equation (29), choose the control signal as follows:
4. Simulation Results
| Algorithm 1 Implementation Procedure of the Proposed Control Method |
| Step 1. The UH model (1) is given. |
| Step 2. Define the error transformations (20) and (24). |
| Step 3. Define the FTNNDO (30) to approximate the lump disturbances with adaptive laws (31) and (32). |
| Step 4. Define the virtual control laws (49), (52), (59), the actual control laws (53) and (62). |
| Step 5. Compute and make holds. |
| Step 6. Define desired trajectories and set the initial states, external disturbances and uncertainties of the UH system (1). |
| Step 7. Tune the parameters of the RBFNNs and select the center and width of the Gaussian function reasonably. |
| Step 8. Set design parameters of prescribed performance functions, FTNNDO and the controller. |
| Step 9. Start the simulation and observe the tracking errors. If the tracking errors are bounded and converge to a small neighborhood, then output and , otherwise go to Step 8. |
- Test 1: Comparative simulation of the different prescribed performance methods
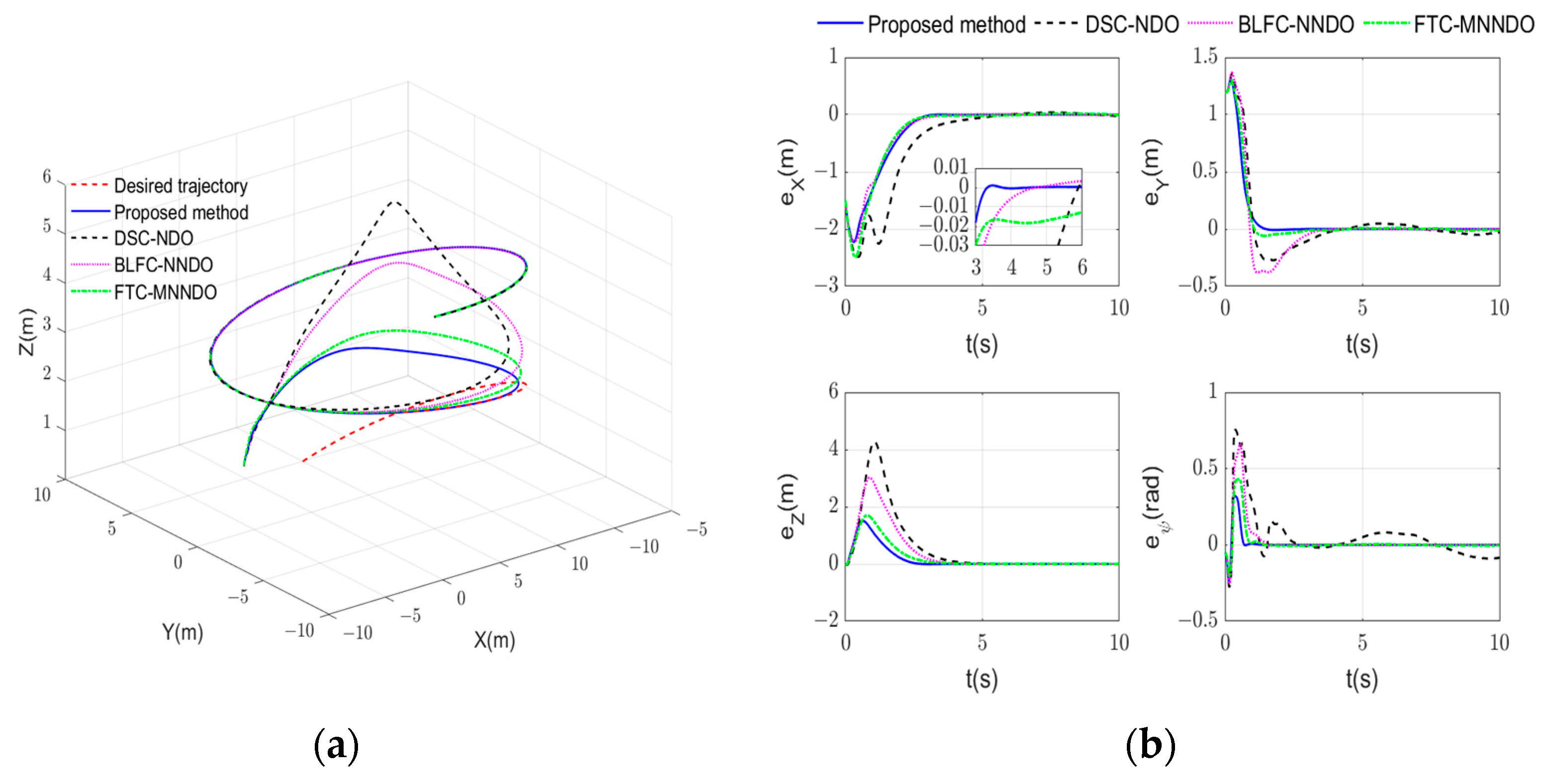
- Test 2: Comparative simulation of the different observer-based controllers
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yan, K.; Chen, M.; Wu, Q.; Zhu, R. Robust adaptive compensation control for unmanned autonomous helicopter with input saturation and actuator faults. Chin. J. Aeronaut. 2019, 32, 2299–2310. [Google Scholar] [CrossRef]
- Zhu, Y.; Xu, N.; Chen, X.; Zheng, W.X. H∞ control for continuous-time Markov jump nonlinear systems with piecewise-affine approximation. Automatica 2022, 141, 110300. [Google Scholar] [CrossRef]
- Shekhar, R.C.; Kearney, M.; Shames, I. Robust model predictive control of unmanned aerial vehicles using waysets. J. Guid. Control Dyn. 2015, 38, 1898–1907. [Google Scholar] [CrossRef]
- Fang, X.; Wu, A.; Shang, Y.; Dong, N. A novel sliding mode controller for small-scale unmanned helicopters with mismatched disturbance. Nonlinear Dyn. 2016, 83, 1053–1068. [Google Scholar] [CrossRef]
- Lai, Y.C.; Le, T.Q. Adaptive learning-based observer with dynamic inversion for the autonomous flight of an unmanned helicopter. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1803–1814. [Google Scholar] [CrossRef]
- Gül, A.; Cakmak, E.; Karakas, A. Drone selection for forest surveillance and fire detection using interval valued neutrosophic edas method. Facta Univ.-Ser. Mech. Eng. 2024. online first. [Google Scholar] [CrossRef]
- Yang, J.H.; Hsu, W.C. Adaptive backstepping control for electrically driven unmanned helicopter. Control Eng. Pract. 2009, 17, 903–913. [Google Scholar] [CrossRef]
- Zhu, B.; Huo, W. Robust nonlinear control for a model-scaled helicopter with parameter uncertainties. Nonlinear Dyn. 2013, 73, 1139–1154. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, Z.; Liang, H.; Ahn, C.K. Neural-network-based predefined-time adaptive consensus in nonlinear multi-agent systems with switching topologies. IEEE Trans. Neural Netw. Learn. Syst. 2023, 35, 9995–10005. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, W.; Li, B.; Yang, Y.; Xiao, B. Finite-time formation tracking control with collision avoidance for quadrotor UAVs. J. Franklin Inst. 2020, 357, 4034–4058. [Google Scholar] [CrossRef]
- Cao, Y.; Ren, W.; Meng, Z. Decentralized finite-time sliding mode estimators and their applications in decentralized finite-time formation tracking. Syst. Control Lett. 2010, 59, 522–529. [Google Scholar] [CrossRef]
- Zhao, L.; Jia, Y. Finite-time attitude tracking control for a rigid spacecraft using time-varying terminal sliding mode techniques. Int. J. Control 2015, 88, 1150–1162. [Google Scholar] [CrossRef]
- Bribiesca-Argomedo, F.; Krstic, M. Backstepping-forwarding control and observation for hyperbolic PDEs with Fredholm integrals. IEEE Trans. Autom. Control 2015, 60, 2145–2160. [Google Scholar] [CrossRef]
- Reddy, P.M.; Shimjith, S.R.; Tiwari, A.P.; Kar, S. Backstepping based model reference adaptive control for nuclear reactor with matched and unmatched uncertainties. Prog. Nucl. Energy 2023, 158, 104585. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Farrell, J.A.; Polycarpou, M.; Sharma, M.; Dong, W. Command filtered backstepping. IEEE Trans. Autom. Control 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Zhao, L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, J.; Fu, J.; Shi, Y.; Chen, C. Rate bumpless transfer control for switched linear systems with stability and its application to aero-engine control design. IEEE Trans. Ind. Electron. 2020, 67, 4900–4910. [Google Scholar] [CrossRef]
- Bu, X. Guaranteeing prescribed output tracking performance for air-breathing hypersonic vehicles via non-affine back-stepping control design. Nonlinear Dyn. 2018, 91, 525–538. [Google Scholar] [CrossRef]
- Li, R.; Chen, M.; Wu, Q. Adaptive neural tracking control for uncertain nonlinear systems with input and output constraints using disturbance observer. Neurocomputing 2017, 235, 27–37. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- He, W.; David, A.O.; Yin, Z.; Sun, C. Neural network control of a robotic manipulator with input deadzone and output constraint. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 759–770. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Prescribed performance adaptive control for multi-input multi-output affine in the control nonlinear systems. IEEE Trans. Autom. Control 2010, 55, 1220–1226. [Google Scholar] [CrossRef]
- Han, S.I.; Lee, J.M. Improved prescribed performance constraint control for a strict feedback non-linear dynamic system. IET Control. Theory Appl. 2013, 7, 1818–1827. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Doulgeri, Z.; Rovithakis, G.A. Neuro-adaptive force/position control with prescribed performance and guaranteed contact maintenance. IEEE Trans. Neural Netw. 2010, 21, 1857–1868. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Shi, P.; Dong, W.; Yu, H. Observer and command-filter-based adaptive fuzzy output feedback control of uncertain nonlinear systems. IEEE Trans. Ind. Electron. 2015, 62, 5962–5970. [Google Scholar] [CrossRef]
- Chen, M.; Tao, G.; Jiang, B. Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2086–2097. [Google Scholar] [CrossRef]
- Xu, B. Disturbance observer-based dynamic surface control of transport aircraft with continuous heavy cargo airdrop. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 161–170. [Google Scholar] [CrossRef]
- Chen, L.; Zhu, Y.; Ahn, C.K. Adaptive neural network-based observer design for switched systems with quantized measurements. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 5897–5910. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods—An overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef]
- Sun, H.; Guo, L. Neural network-based DOBC for a class of nonlinear systems with unmatched disturbances. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 482–489. [Google Scholar] [CrossRef]
- Wang, D.; Zong, Q.; Tian, B.; Shao, S.; Zhang, X.; Zhao, X. Neural network disturbance observer-based distributed finite-time formation tracking control for multiple unmanned helicopters. ISA Trans. 2018, 73, 208–226. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wang, Q.; Sun, C. Adaptive tracking control of high-order MIMO nonlinear systems with prescribed performance. Front. Inform. Technol. Electron. 2021, 22, 986–1001. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans. Autom. Control 2001, 46, 1061–1079. [Google Scholar] [CrossRef]
- Tong, S.; Sui, S.; Li, Y. Fuzzy adaptive output feedback control of MIMO nonlinear systems with partial tracking errors constrained. IEEE Trans. Fuzzy Syst. 2015, 23, 729–742. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Yang, T. Finite-Time Prescribed Performance Tracking Control for Unmanned Helicopter System Using Neural Network. Processes 2024, 12, 1559. https://doi.org/10.3390/pr12081559
Li Y, Yang T. Finite-Time Prescribed Performance Tracking Control for Unmanned Helicopter System Using Neural Network. Processes. 2024; 12(8):1559. https://doi.org/10.3390/pr12081559
Chicago/Turabian StyleLi, Yang, and Ting Yang. 2024. "Finite-Time Prescribed Performance Tracking Control for Unmanned Helicopter System Using Neural Network" Processes 12, no. 8: 1559. https://doi.org/10.3390/pr12081559
APA StyleLi, Y., & Yang, T. (2024). Finite-Time Prescribed Performance Tracking Control for Unmanned Helicopter System Using Neural Network. Processes, 12(8), 1559. https://doi.org/10.3390/pr12081559