Abstract
Electric vertical takeoff and landing (eVTOL) aircraft attract attention due to their unique characteristics of reduced noise, moderate pollutant emission, and lowered operating cost. However, the benefits of electric vehicles, including eVTOL aircraft, are critically challenged by the energy density of batteries, which prohibit long-distance tasks and broader applications. Since the takeoff process of eVTOL aircraft demands excessive energy and couples multiple subsystems (such as aerodynamics and propulsion), multidisciplinary analysis and optimization (MDAO) become essential. Conventional MDAO, however, iteratively evaluates high-fidelity simulation models, making the whole process computationally intensive. Surrogates, in lieu of simulation models, empower efficient MDAO with the premise of sufficient accuracy, but naive surrogate modeling could result in an enormous training cost. Thus, this work develops a twin-generator generative adversarial network (twinGAN) model to intelligently parameterize takeoff power and wing angle profiles of an eVTOL aircraft. The twinGAN-enabled surrogate-based takeoff trajectory design framework was demonstrated on the Airbus Vahana aircraft. The twinGAN provisioned two-fold dimensionality reductions. First, twinGAN generated only realistic trajectory profiles of power and wing angle, which implicitly reduced the design space. Second, twinGAN with three variables represented the takeoff trajectory profiles originally parameterized using 40 B-spline control points, which explicitly reduced the design space while maintaining sufficient variability, as verified by fitting optimization. Moreover, surrogate modeling with respect to the three twinGAN variables, total takeoff time, mass, and power efficiency, reached around 99% accuracy for all the quantities of interest (such as vertical displacement). Surrogate-based, derivative-free optimizations obtained over 95% accuracy and reduced the required computational time by around 26 times compared with simulation-based, gradient-based optimization. Thus, the novelty of this work lies in the fact that the twinGAN model intelligently parameterized trajectory designs, which achieved implicit and explicit dimensionality reductions. Additionally, twinGAN-enabled surrogate modeling enabled the efficient takeoff trajectory design with high accuracy and computational cost reduction.
1. Introduction
The 2019 Urban Mobility Report [1] from the Texas Transportation Institute summarized the state of congestion in cities of all sizes between 1982 and 2017. The report showed that the annual hours of delay per auto commuter increased by 30∼40% for small, medium, and large cities and 20∼30% for very large cities over the entire time period. Thus, urban air mobility (UAM) emerges as a different mode of transportation to alleviate traffic congestion in densely populated, urban landscapes. UAM is an aerial transportation system that works in parallel with existing systems to add additional capacity to the transportation network. Straubinger et al. [2] summarized the infrastructure needed to operate UAM, which was composed of vertiports distributed across cities where aircraft could pick up and deliver passengers and cargo. Vascik and Hansman [3] performed sensitivity analyses to determine the effect of the ratio of gates to touchdown and takeoff (TLOF) areas, as well as staging areas and additional TLOF areas, on aircraft throughput. Vascik [4] showed that existing UAM, which relied primarily on helicopters, failed to capture a large share of the commuter market share due to the cost per passenger. Thus, improved technology in UAM adoption is essential to alleviate congestion as well as reduce pollutant emissions, noise, and operating costs of UAM [5].
Duffy et al. [5] showed that electric vertical takeoff and landing (eVTOL) aircraft provided a unique solution of reducing the operating cost by 20∼30% compared to a Robinson R44 helicopter and by 200∼300% compared to turbine helicopters performing similar missions. André and Hajek [6] performed a life cycle analysis and showed that eVTOL aircraft were able to compete with internal combustion as well as electric cars with respect to emissions and outperformed them with a sufficiently clean energy grid. Courtin et al. [7] showed that electric short takeoff and landing aircraft were feasible options for UAM, in addition to the traditionally considered eVTOL aircraft. Their trade study used geometric programming to evaluate takeoff distance and aircraft weight and capacity, which showed that aircraft runways between 100∼300 ft were currently feasible in urban areas.
Despite their promising features, eVTOL aircraft still have bottlenecks, including the noise, vibrations, and thermal management during eVTOL flights, according to Edwards and Price [8]. Graham et al. [9] investigated the potential noise and emission reduction of proposed next-generation aircraft designs, such as the Boeing SUGAR and NASA N+3 concepts. They concluded that NOx emission reductions were the most feasible, followed by and finally noise emissions. Gao et al. [10] proposed an optimization method to efficiently balance demand fulfillment, noise control, and energy savings. They found that their method was able to balance all requirements and propose equitable strategies by considering the social welfare of the citizens exposed to the UAM network. Falck et al. [11] performed trajectory optimization subject to subsystem thermal constraints. Their work showed that the thermal load of the system was driven by the initial takeoff and climb and that adequate component sizing was critical to avoid thermal constraints. They concluded that trajectory optimization could reduce thermal loads and the required motor size.
Moreover, the takeoff process of eVTOL aircraft demands excessive energy. Chauhan and Martins [12] performed multidisciplinary analysis and optimization (MDAO) [13] to determine an optimal takeoff trajectory, which minimized the energy consumed. They showed that stall constraints and wing loading affected the energy consumed negligibly, while acceleration constraints of 0.3 g required 9% more energy than the unconstrained trajectory. The acceleration-constrained trajectory consumed 5% less energy than a conventional takeoff, where the aircraft climbed at the best climbing rate. Panish and Bacic [14] highlighted the significance of active flow control (AFC) in optimizing the transition trajectory for tilt-wing configurations. Their approach achieved minimum energy consumption at zero altitude variation, and the leading-edge AFC effectively prevented wing aerodynamic stall by introducing a constant-altitude constraint during the cruise-to-hover maneuver and improved performance during hover-to-cruise transitions.
MDAO-based trajectory design adopts numerical ordinary differential equation solvers, such as the Euler or Runge–Kutta methods [12,15]. These methods iteratively evaluate physics-based simulation models, which makes the whole process computationally intensive. Surrogates, in lieu of simulation models, enable the possibility of efficient analysis and design optimization. Li et al. [16] summarized the benefits of using machine learning models for surrogate-based optimization, since they provided efficient, continuous response surfaces. Koziel and Leifsson [17] and Thelen et al. [18] performed surrogate-based aerodynamic shape optimization and showed that surrogates could reduce the computational cost of the optimization. Queipo et al. [19] used multiple surrogate models to perform the multi-objective optimization of a rocket injector. The surrogate-based optimization was able to reliably find the optimal locations. Alba et al. [20] performed surrogate-based MDAO to evaluate wing–propeller interactions and found that the surrogate-based optimization required about 50% less function calls than the reference optimization. Swischuk et al. [21] created a physics-based surrogate model for a combustion reaction in an injector and achieved greater than 99% accuracy for each model. Lazzara et al. [22] used long short-term memory (LSTM)-based autoencoders coupled with DNN to predict dynamic landing loads for structural design and achieved greater than 99% accuracy.
To enable efficient takeoff trajectory design and facilitate surrogate modeling, this work leverages generative adversarial networks (GANs) [23] for intelligent parameterization. GAN features two competing neural networks, the generator and the discriminator, which seek to minimize their own independent objectives. In particular, the generator aims to generate similar shapes or data patterns as training data while the discriminator differentiates the generated and existing data. Through this competition, the model improves itself until the generator is able to generate shapes that match the pattern of training data [24], and the discriminator cannot differentiate. Du et al. [25] implemented a Bspline-based GAN model to parameterize airfoil shapes and showed that the GAN model had sufficient variations to perform aerodynamic shape optimization. Jarry et al. [26] used GAN to predict aircraft trajectories based on historical flights to identify atypical trajectories and presented realistic flight trajectories generated by the GAN. GAN has also been introduced to perform inverse eVTOL trajectory optimization while reducing the computational cost by 50% and achieving 99.5% accuracy [27,28].
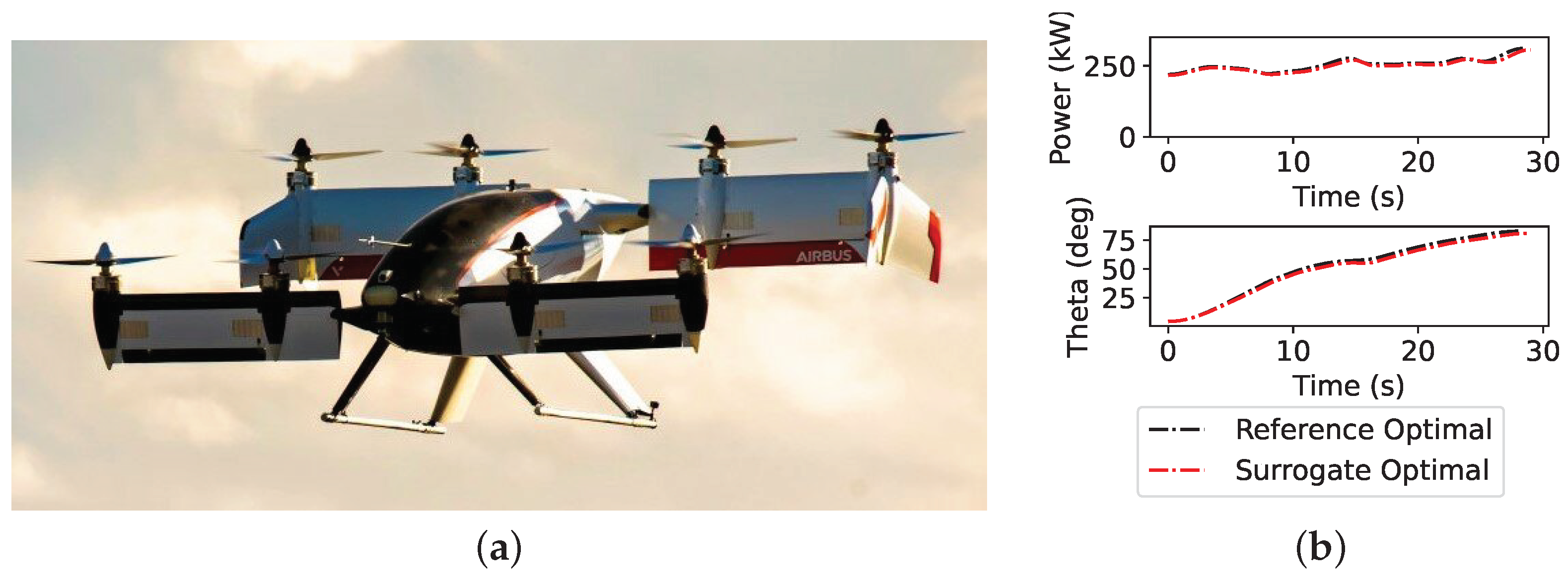
This work uses GAN for the intelligent parameterization of takeoff trajectory profiles and as a dimensionality reduction technique to facilitate DNN and LSTM surrogate modeling. To enable maximum parameterization flexibility, the proposed GAN model has two generators, with one representing power profiles and the other one for wing angle profiles, termed the twin-generator GAN (twinGAN). The performance of the twinGAN model is assessed via fitting optimization to guarantee sufficient variability within the twinGAN–variable space. The surrogate models are trained to capture the MDA mapping between twinGAN variables, as well as flight conditions and quantities of interesting. Surrogate-based efficient takeoff trajectory design is conducted and compared against simulation-based designs on the Airbus Vahana drone (Figure 1a). Thus, the main contribution of this work is summarized as follows. First, the twinGAN model is proposed for intelligent parameterization as well as two-fold dimensionality reductions of takeoff trajectories of eVTOL aircraft. Second, efficient takeoff trajectory design is enabled by effective surrogate modeling at the premise of over 95% accuracy. Third, the literature on the takeoff trajectory design of eVTOL aircraft is enriched for minimal energy demand, which is expected to break through the bottleneck of battery consumption. The twinGAN and surrogate-based design framework has enoguh generality to allow it to be used for other relevant engineering design applications.
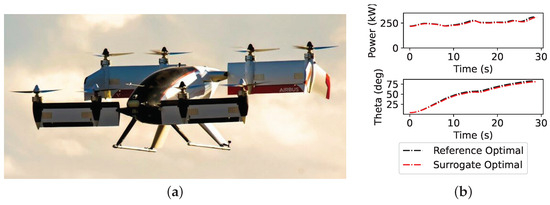
Figure 1.
The Airbus Vahana [29] (a) is used to demonstrate the twinGAN and surrogate-based MDAO in this work. The surrogate-based optimal design is expected to match the simulation-based reference optimal design without visualizable differences as shown in an arbitrary case. (b) Comparison of surrogate-based and reference optimal trajectories.
The rest of this paper is organized as follows. Section 2 describes the eVTOL simulation models used to generate data, as well as details on the GAN, DNN, and LSTM models. Section 3 presents the dimensionality reduction achieved by the GAN model, the accuracy of the DNN and LSTM surrogate models, and the results of the surrogate-based optimization compared against simulation-based reference optimal designs. Section 4 ends this paper with conclusions and future work.
2. Methodology
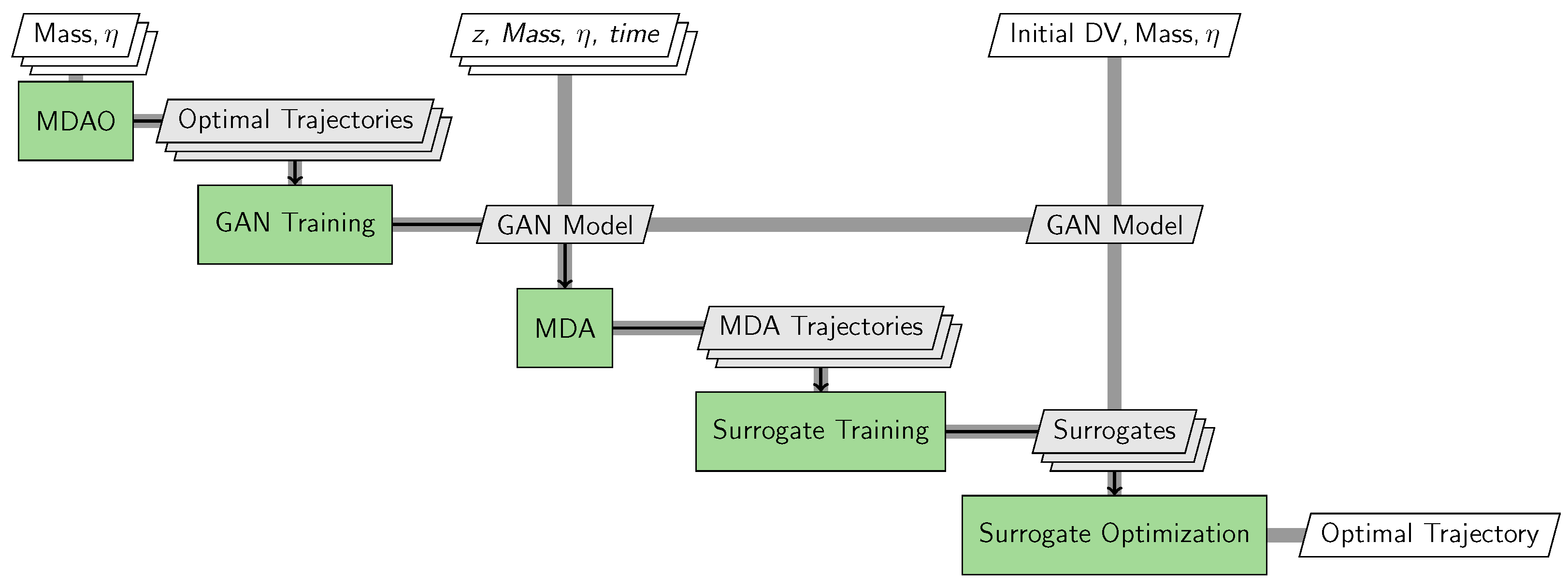
This section introduces the methodology used in this work, which consists of five steps (Figure 2). First, simulation-based MDAO (Section 2.1) is performed for variable flight conditions (i.e., mass and efficiency in this work) to generate a set of optimal takeoff trajectories. The optimal trajectories are used to train the twinGAN model for intelligent parameterization (Section 2.2). Then, the twinGAN variables are sampled together with flight conditions to generate MDA trajectories. The resulting MDA trajectories are used to train the surrogate models (Section 2.3), which predict model response (such as the flight path and flight velocity). Finally, the GAN and surrogates are used to perform surrogate-based optimization to determine an optimal takeoff trajectory for arbitrary flight conditions.
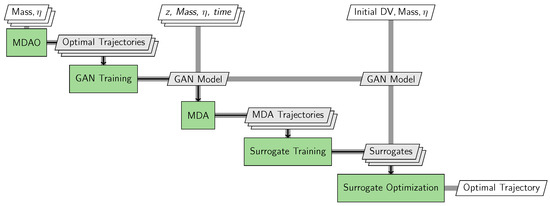
Figure 2.
This process flow diagram represents the flow of information, data, and models throughout this work.
2.1. Drone and Simulation Models
The aircraft considered in this paper is a tandem, tilt-wing, eVTOL aircraft, which is modeled after the Airbus Vahana (Figure 1a). Each wing has a rectangular planform with a span of 6 m, a chord length of 1.5 m, and a cross-sectional shape of the NACA 0012 airfoil. Each wing has four three-bladed propellers with a radius of 0.75 m and a blade chord of 0.1 m. It is assumed the front and back wings share identical shapes, rotate identically, balance the pitch moments, and avoid additional considerations for trim and stability [12]. This reduces the degree of freedom to vertical and horizontal displacements only, which are found with respect to a fixed inertial reference frame. It is also assumed that the propeller thrust line is in line with the wing chord. The body of the aircraft is assumed to have a drag area of 0.35 m2, and the related drag coefficient does not vary with the angle of attack.
2.1.1. Aerodynamics
The pre-stall lift and drag coefficients are provided by finite-wing corrections of lifting-line theory. During the transition from vertical to horizontal flight, it is possible for the wing to stall. The aerodynamic model must be able to predict the lift and drag outside of the standard, linear region. Tangler and Ostowari [30] used experimental data to create a model to predict the post-stall lift coefficient (Equation (1)) and drag coefficient (Equation (5)) of a finite-length rectangular wing.
where
is the wing angle of attack, is the angle of attack at the stall, is the lift coefficient at stall, and is the wing aspect ratio. The post-stall drag coefficient after 27.5 degrees is computed as follows.
where
is the drag coefficient at stall, and is the airfoil thickness-to-chord ratio. Prior to 27.5 degrees, the experimental aerodynamic quantities collected by Tangler and Ostowari [30] are used (Table 1). Tangler and Ostowari [30] and Viterna and Corrigan [31] showed that the airfoil geometry had a minimal effect on the post-stall characteristics, so the geometry is not included in Equations (1) and (5). Tangler and Ostowari [30] also showed that the Reynolds number had little effect on the post-stall characteristics within the range of to . This range is reasonable for the takeoff phase of the aircraft under consideration. In addition, the wings are assumed to be independent when calculating the lift and parasite drag, but the induced drag is affected by the tandem biplane configuration. Due to the wingtip motors, the span efficiency is assumed to be 0.95. The induced drag is determined based on Prandtl [32],
where q is the dynamic pressure and b is the span. For a gap-to-span ratio of 0.25, is approximately 0.4 according to McLaughlin [33]. This can be reduced to the following, where it can be seen that the tandem wings reduce the span efficiency of both wings to 0.68, which is used to calculate the lift and drag for each wing independently.

Table 1.
Drag coefficient data points between 16 and 27.5 degrees from Tangler and Ostowari [30].
Since the lift and drag curves are not smooth where the models change, Kreisselmeier–Steinhauser (KS) functions are used to make them smooth to support gradient-based optimization.
2.1.2. Propulsion
The thrust, as a function of power provided, is calculated using momentum theory as follows.
where is the power supplied to the propeller disk, T is the thrust, is the normal component of the freestream velocity, is the air density, is the area of the propeller disk, is the correction factor to account for nonuniform inflow, tip effects, and simplifications from momentum theory. The thrust must be solved numerically, since the power provided is a design variable. The Newton–Raphson method is applied with an initial guess of 1.2 times the weight of the aircraft.
The profile power can be estimated as
where
is the solidity, is the constant profile drag coefficient, is the parallel component of the freestream velocity, and is the coefficient of profile power. It is assumed that the propellers are variable-pitch and maintain a constant . The solidity is calculated to be 0.13, and is assumed to be 0.012.
The power supplied to the propeller disk can be calculated as follows:
with the supplied electric power as input. A loss factor is used to account for mechanical and electrical losses.
The propellers will produce normal forces when the freestream flow is not aligned with the propeller axes. This force can be approximated using the empirical formula from de Young [34] as follows:
where
is the blade pitch angle at three-quarters of the radius, is the dynamic pressure based on the normal component of the velocity, is the propeller disk area, is the incidence angle, is the effective solidity, B is the number of blades per propeller, is the average blade chord, R is the propeller radius, f is the thrust factor, is the thrust coefficient, and T is the thrust. It is assumed that changes linearly from 0–35° from a flight speed of 0–67 .
2.1.3. Propeller–Wing Interaction
To model the interaction between the induced flow from the propellers to the wings, momentum theory is used. Momentum theory finds a theoretical upper limit () to the amount the flow speed can increase when it passes through a propeller disk. The induced velocity, , can be computed as follows:
Chauhan and Martins [12] calculated the propeller–wing interaction as and tested a range of between 0 and 200%. They showed that the propeller–wing interactions had a negligible effect on the power required for takeoff. Thus, this work assumes .
2.1.4. Dynamics
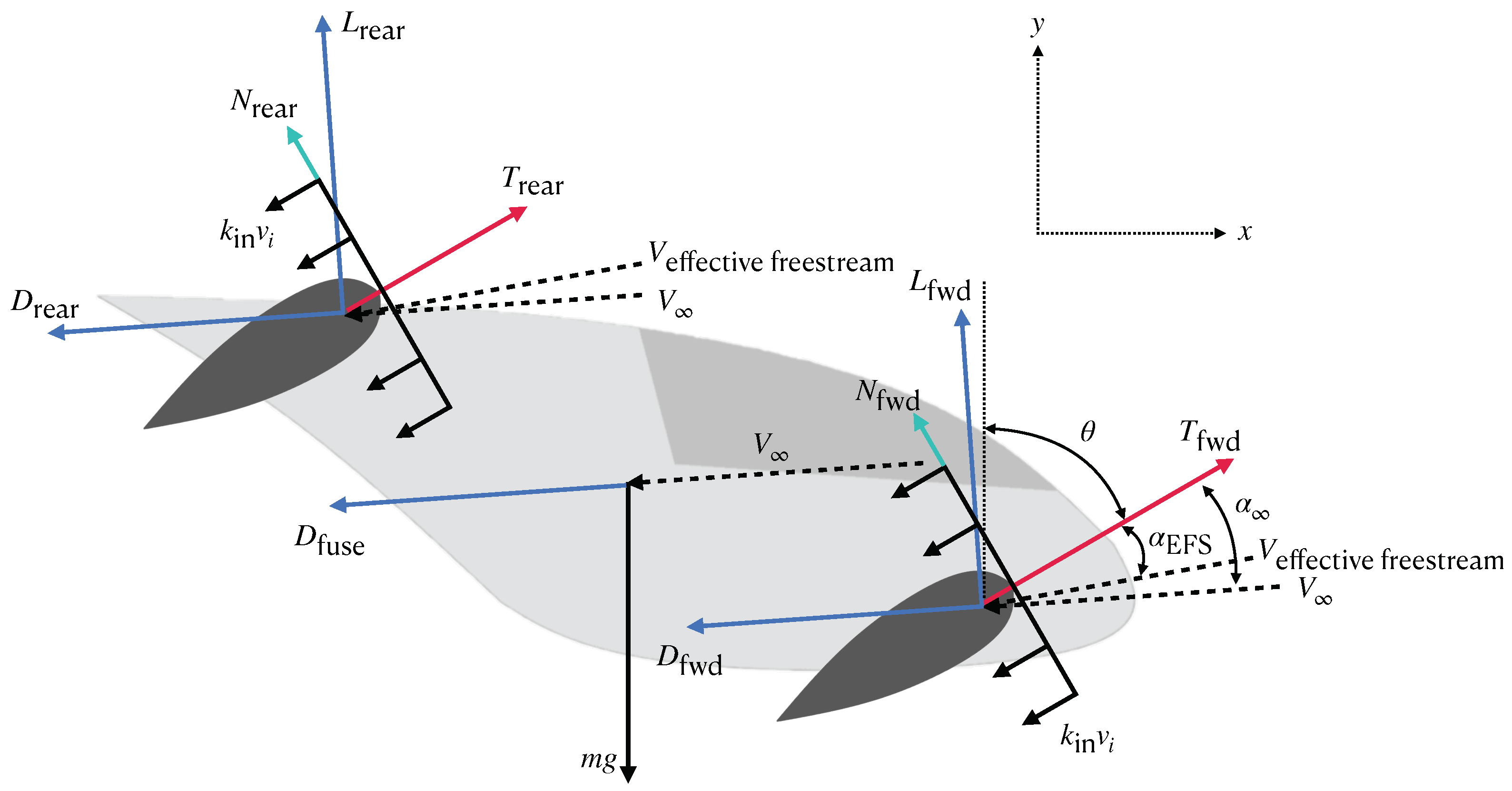
The two-DOF representation of the aircraft dynamics is shown in Figure 3. The x and y components of the velocity at the next step are given by the following equations,
and
where i is the index of the time step, is the length of each time step, is the wing angle relative to vertical, is the freestream angle of attack, is the effective freestream angle of attack due to the propellers, m is the mass of the aircraft, T is the total thrust, is the drag of the fuselage, is the total drag of both wings, is the total lift of both wings, and N is the total normal force from the propellers. The forward Euler method is used to propagate the aircraft states.
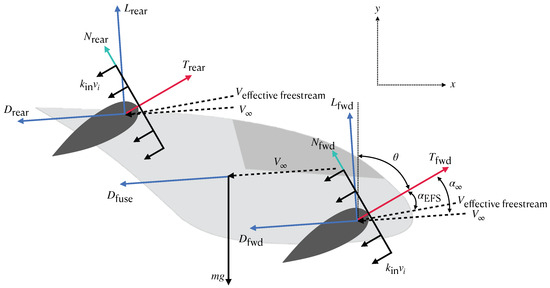
Figure 3.
Dynamics model of aircraft [12].
2.2. Twin-Generator Generative Adversarial Networks
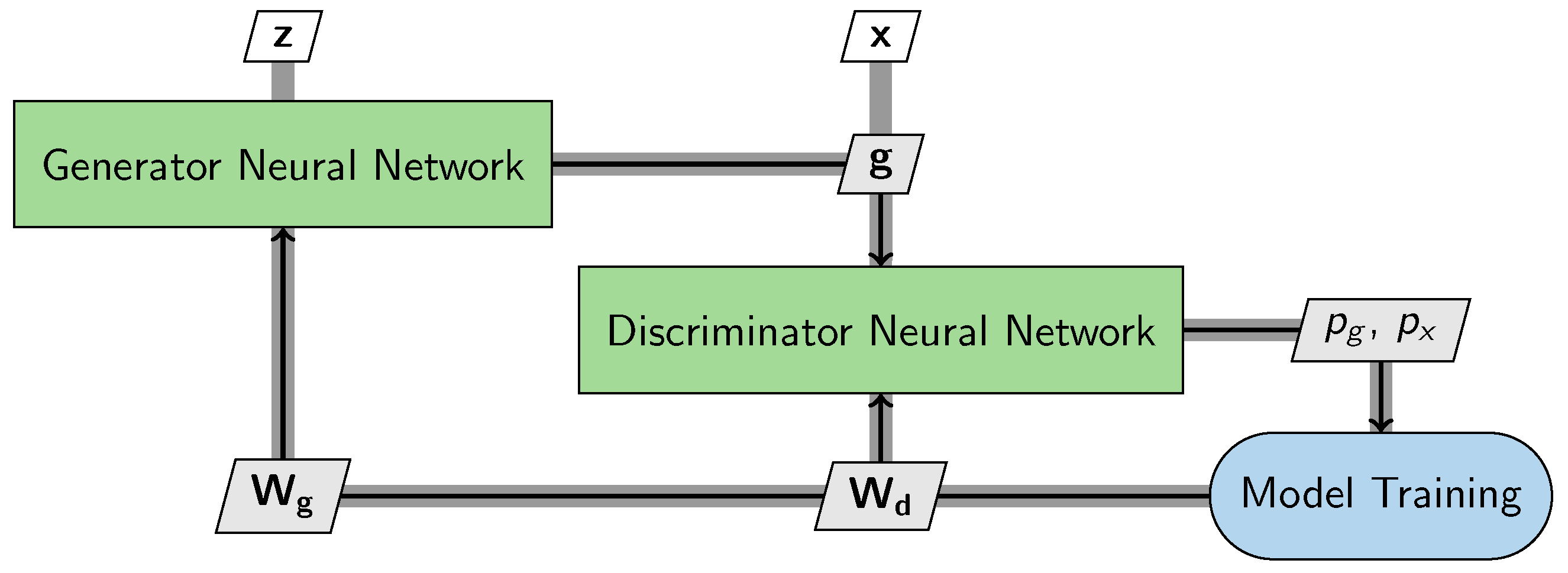
The GAN model was developed as a generative model that attempted to produce data that matched the data pattern of a corresponding training data set [24]. A GAN model is composed of a generator and a discriminator neural network (Figure 4). The generator reads random variables () and outputs data (), and it is desired that these data match the data pattern of the training data (). The discriminator attempts to differentiate and by predicting the probability that a given sample is generated or from training data. The competition between the generator and the discriminator makes a minimax training process as follows:
where V is the loss function, G is the generator, D is the discriminator, is from the training data , and is from the random variable distribution (i.e., Uniform(0, 1) in this work). The discriminator is trained to maximize the probability that the generated and training samples are labeled correctly. The generator is trained to minimize the probability that the generated sample is differentiated by the discriminator. This training process continues until the generator is well trained that the discriminator cannot distinguish between and .
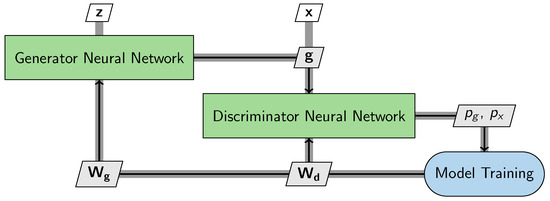
Figure 4.
Architecture of GAN model.
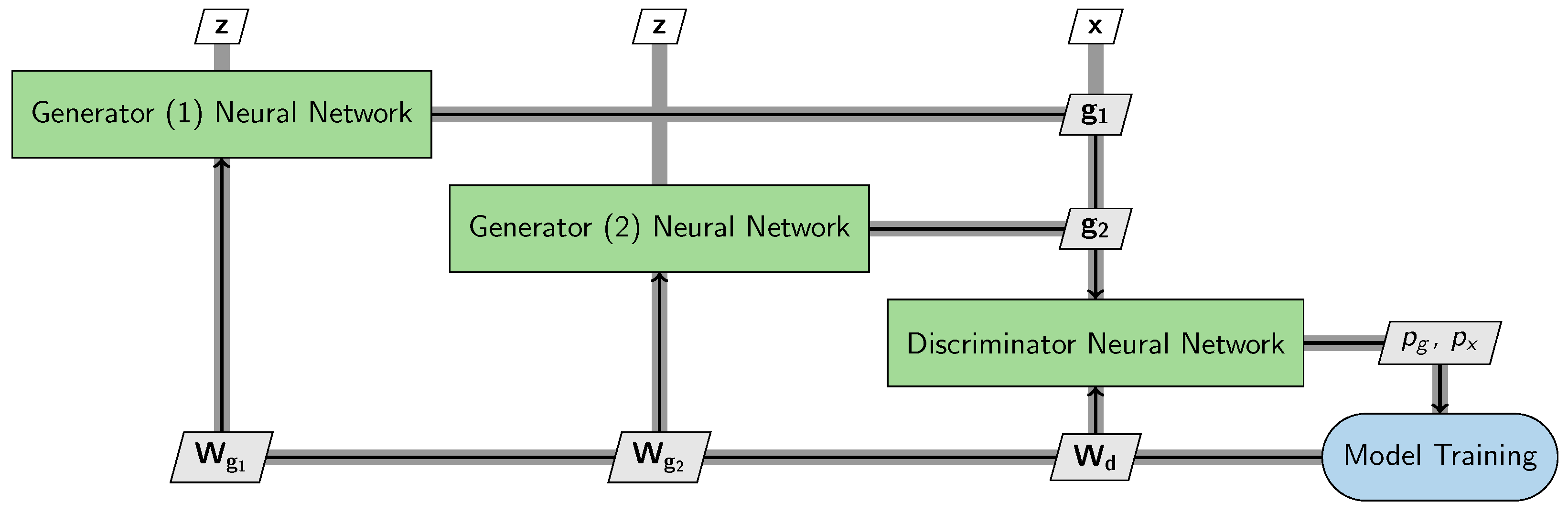
The twinGAN model in this work adds a second generator (Figure 5), which ensures the trajectories of power and wing angle are generated independently and improves the flexibility of the networks. The minimax loss function for training the twinGAN model is shown as follows:
where represents the first generator and represents the second generator.
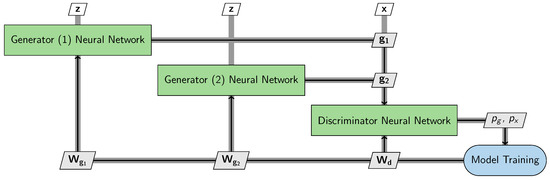
Figure 5.
Architecture of the twinGAN model.
The twinGAN generators each generate 20 B-spline control points, which are used to parameterize the trajectories of the power or wing angle. The generators have three hidden layers with 256, 512, and 1024 nodes respectively. The generators use LeakyReLU activation functions with after each hidden layer, followed by a batch normalization layer with a momentum of 0.8. The output layer of the generator has a sigmoid activation function. The discriminator has an input dimension of 40 and an output dimension of one. The discriminator has two hidden layers of 512 and 256 nodes, respectively. The discriminator uses LeakyReLU activation functions with after each hidden layer. The output layer of the discriminator has a sigmoid activation function. The twinGAN is trained using the Adam [35] optimizer, in TensorFlow [36] with a learning rate of 0.0002 and a value of 0.5.
2.3. Surrogate Modeling
2.3.1. Deep Neural Networks
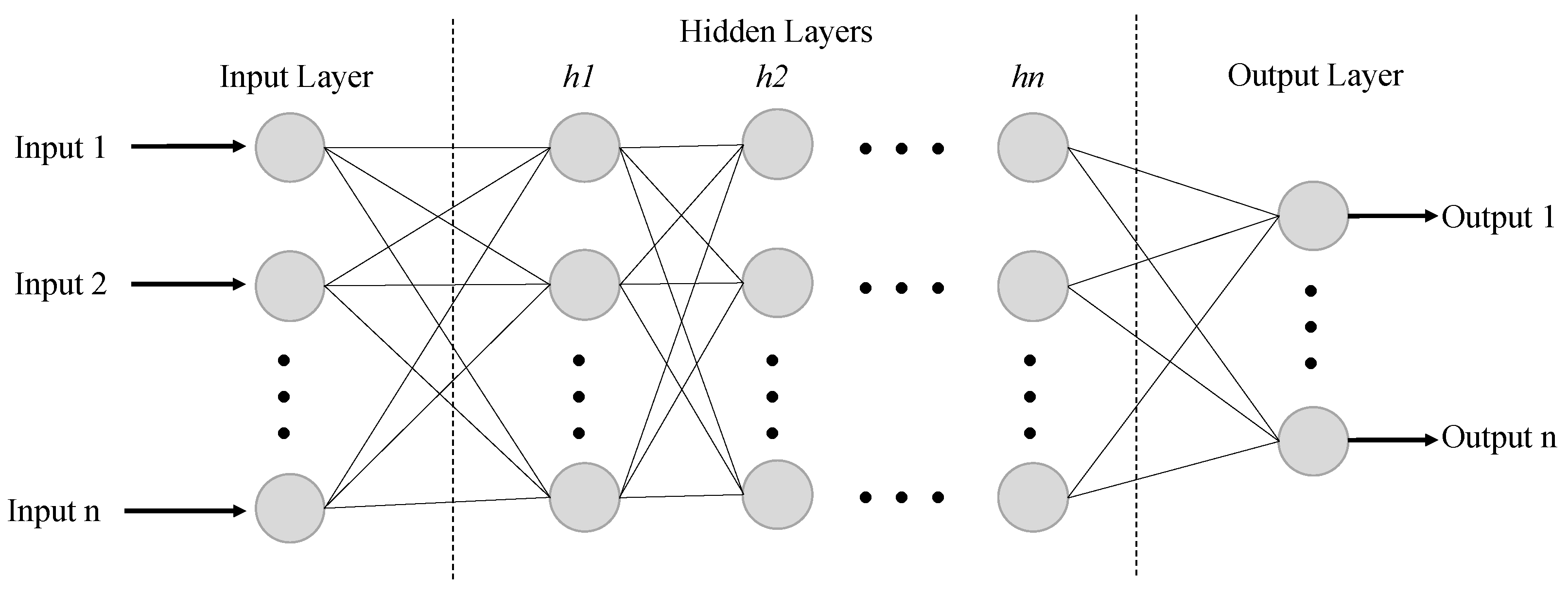
DNN is a data-driven method that maps the relationship between a given input and output. A DNN architecture consists of an input layer, followed by several hidden layers, and ends with an output layer, where each layer has multiple neuron nodes (Figure 6). Each node has a linear operation with nonlinearity added by an activation function,
where
where w values are the weights of the connections, b is a bias applied to the node, and is the activation function applied to the node. The optimal weights and biases are determined by training the model, which entails a process of iteratively updating the parameters of the network. The parameters are updated using the optimizer, which utilizes automatic differentiation to determine the gradients. The training process enables the DNN to learn the mapping from the input to the output.
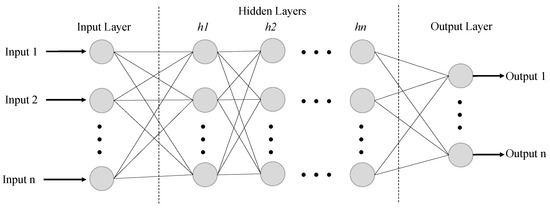
Figure 6.
General deep neural network architecture.
For this work, a DNN is used to predict the energy consumption (i.e., the objective function of the takeoff trajectory design) during the takeoff. The architecture of the DNN and learning rate are optimized using Bayesian optimization through the Keras Tuner [37]. The DNN has five hidden layers of 410, 290, 500, 310, and 500 nodes, respectively. Each hidden layer has a ReLU activation function, while the final layer uses a linear activation function. The model is trained using the Adam optimizer with a Mean Squared Error (MSE) loss in TensorFlow with a learning rate of 0.0036. The model is trained for 500 epochs with a batch size of 100 and a validation split of 20% of the whole data set. The model with the lowest validation loss is selected for the surrogate-based optimization.
2.3.2. Long Short-Term Memory Networks
The DNN surrogate is used to predict the scalar objective function of the trajectory optimization, while the constraints of the takeoff trajectory design rely on time-sequence information. Recurrent neural networks (RNNs) have been used to predict time-series data but suffer when facing long-time sequences due to “vanishing” or “exploding” gradients. LSTM is an adaptation of RNN that uses memory gates to address long-sequence mapping [38].
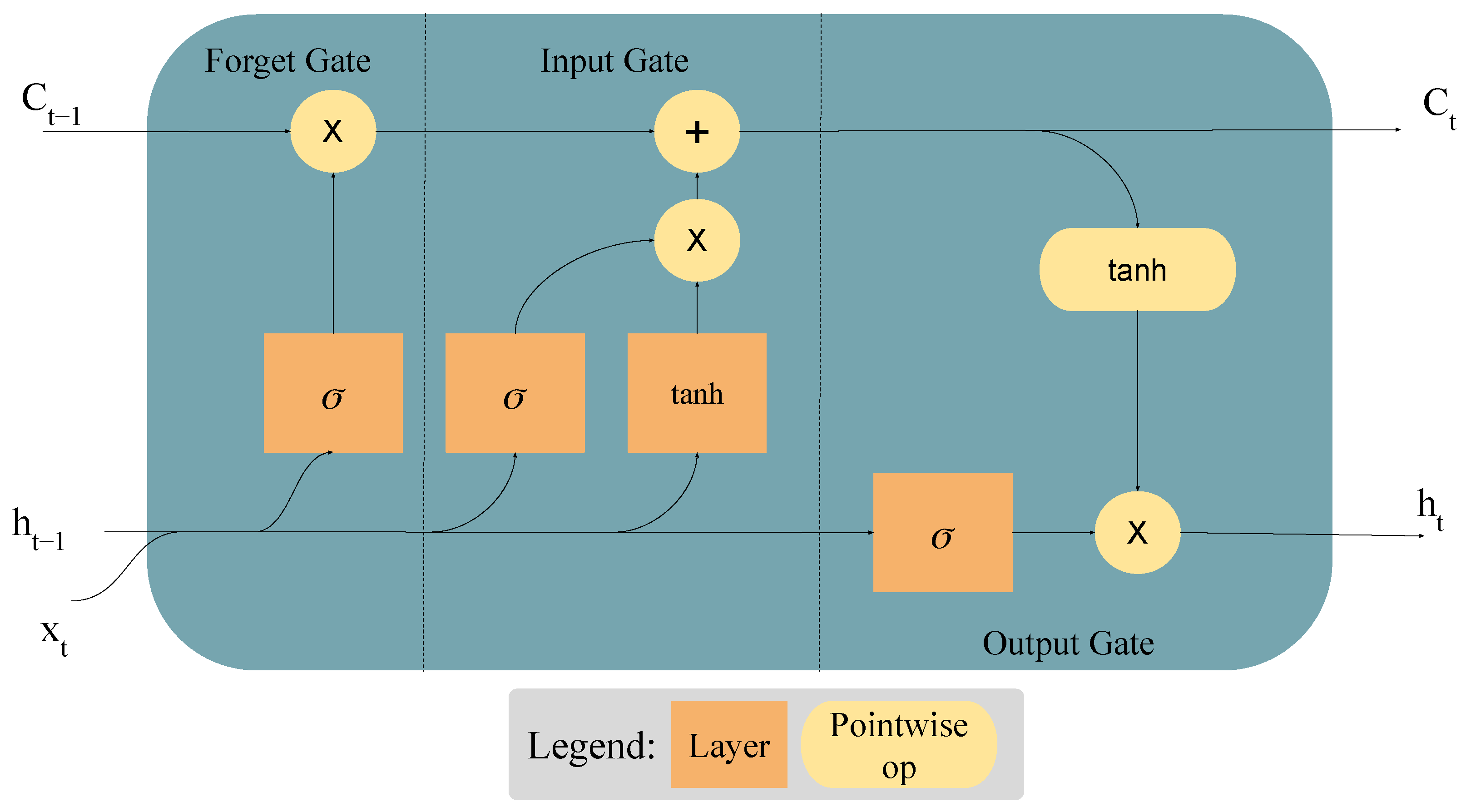
LSTM networks utilize cells (Figure 7), rather than nodes, to excel with time-series data [39]. LSTM networks contain three gates (i.e., the forget, input, and output gates) that operate on the input parameters (,) and an internal memory state. The forget gate combines the input parameters and passes the resulting vector through a sigmoid activation function, which provides a vector of bounded values [0, 1]. The product with the existing internal memory state causes the internal memory state to “forget” the values where the gate outputs zero. The input gate passes the input parameters through a sigmoid and tanh function separately. The tanh function provides a vector of candidate state values, and the product with the output of the sigmoid function proposes new candidates for the internal memory state. The output gate passes the internal memory state through a tanh function to create a proposed output vector, while the input parameters are passed through a sigmoid function. The product of the results produces the cell output. The equations for each gate are shown below,
where is the sigmoid function, represents the weights for the given gate, represents the biases for the given gate, is the cell output for the previous time step, and is the input for the current time step. These equations explain the remainder of the cell operations,
where is the candidate for the cell state, is the current cell state, is the cell output for the current time step, and ⊙ is Hadamard product operation.
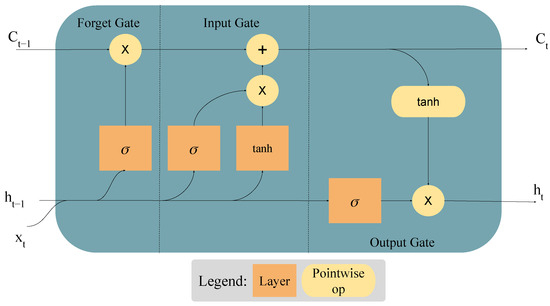
Figure 7.
Long short-term memory cell incorporating additional gates, which modify the internal memory state to enhance the predictive performance on long time-sequence data.
For this work, LSTM networks are used to predict the time-sequence constraints (such as acceleration and angle of attack profiles) of the optimization. The LSTM networks have 500 output dimensions. All LSTM models use a fixed architecture with four hidden layers of 200 nodes and a learning rate of 0.001. Each hidden layer includes a ReLU activation function while the final layer uses a linear activation function. The LSTM models are trained using the Adam optimizer with an MSE loss in TensorFlow. The models are trained with a batch size of 200 and a validation split of 20%. The model with the lowest validation loss is selected for the surrogate-based optimization.
3. Results
This section presents the results achieved by the twinGAN and surrogate models, followed by the surrogate-based optimization design and verification. Table 2 shows the original problem formulation [12], based on which the twinGAN and surrogate models are developed. This setup minimizes the energy consumption during the takeoff process while constraining the displacements (, , and ), cruise velocity (), passenger comfort (), and bounds of the angle of attack ( and ). The constraints on cruise altitude and velocity follow the specifications of Uber Elevate [40]. The final displacement and velocity constraints ensure that the aircraft meets the desired requirements. The stall and acceleration constraints are added to ensure passenger comfort. The design variables are used to parameterize the power () and wing angle to vertical () trajectories, each of which leverages 20 B-spline control points.
Table 2.
Takeoff trajectory design problem formulation.
3.1. Twin-Generator Generative Adversarial Networks
The twinGAN model is trained using simulation-based optimal trajectories, for which the mass of the aircraft and propulsive efficiency () are varied. In particular, the mass is varied by from the baseline value (i.e., 725 kg), while the efficiency is varied by from the baseline value (i.e., 90%). For a given mass and efficiency, the trajectory is determined by propagating the aircraft state using the forward Euler method. The trajectory is optimized using the SNOPT [41] optimizer to determine the power and wing angle control points and the total flight time that results in a minimum-energy trajectory. The twinGAN training data set consists of 1099 optimal trajectories. The flight conditions of mass and efficiency are sampled using a Latin hypercube sampling (LHS) method [42]. The twinGAN generates values in the range of [0, 1], which is then scaled to fit the power range of [170,000, 311,000] kW and the wing-angle range of [0, 0.75] rad. The model is trained for 25,000 epochs, and the last 5000 models are saved and evaluated based on the lowest generator error, discriminator error, and combined error. The twinGAN with the lowest combined error is eventually selected by comparing the generated trajectories (Figure 8) with the training trajectories (Figure 9).
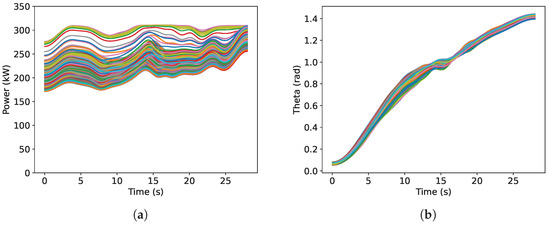
Figure 8.
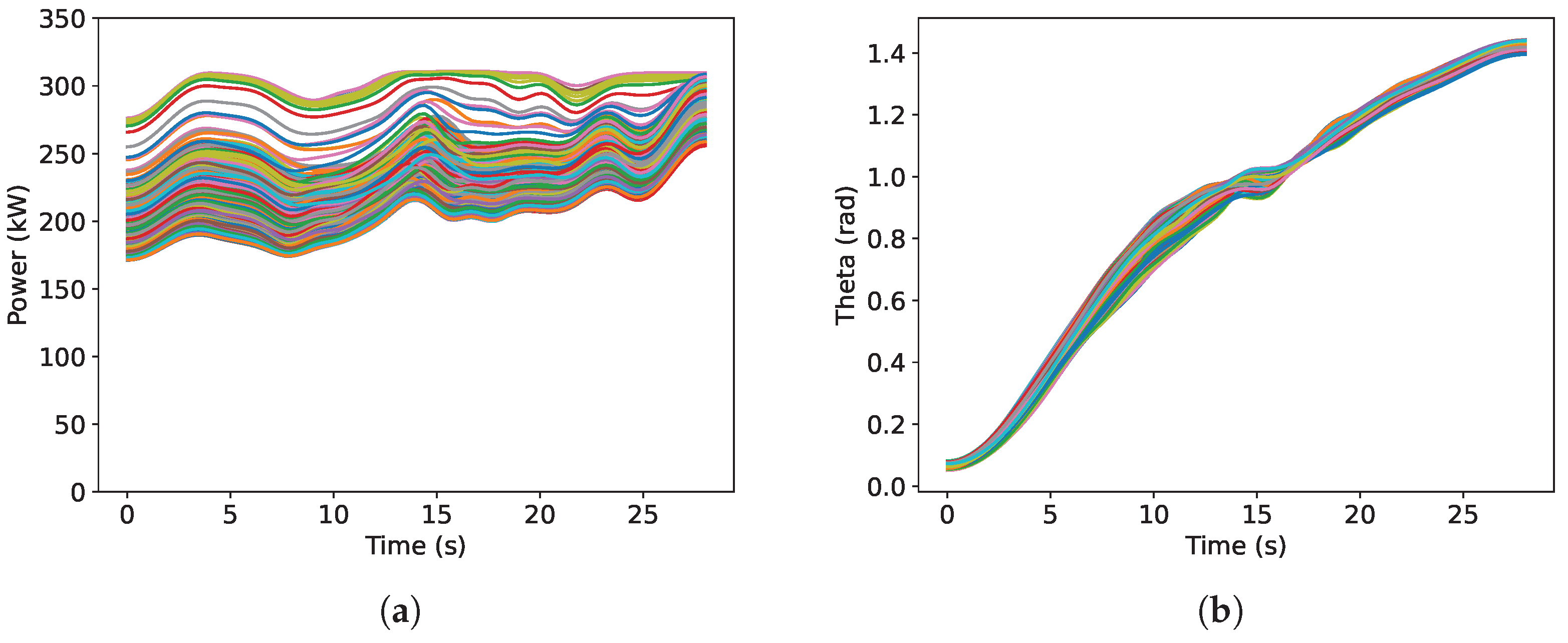
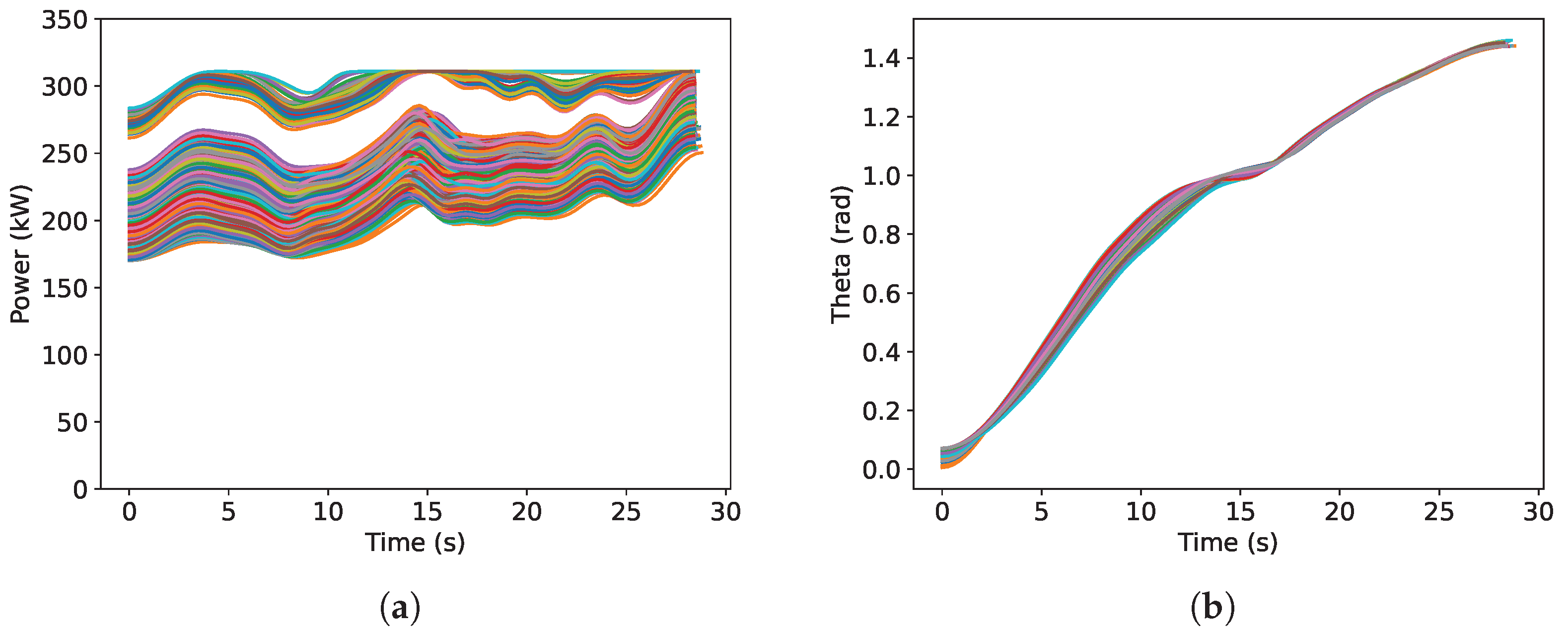
The variability of the twinGAN model is shown. (a) Power trajectories generated by twinGAN. (b) Wing angle trajectories generated by twinGAN.
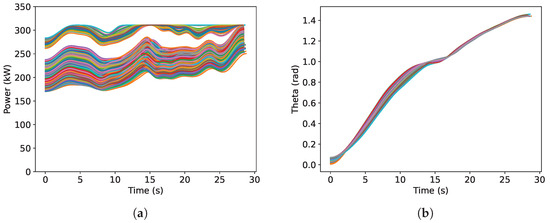
Figure 9.
The variability of the training data is shown. (a) Power trajectories from the training data. (b) Wing angle trajectories from the training data.
The generative performance of the selected twinGAN model is then quantified by fitting optimization towards the training data set using the Powell [43] optimizer in SciPy [44]. The fitting optimization aims to match B-spline control points of the optimal power and wing angle trajectories in the training data set by varying the twinGAN variables. The B-spline control points generated by the optimal twinGAN variables during the fitting optimization are used to reconstruct the optimal power and wing angle trajectories. Each of the 1099 optimal trajectories in the training data is uniformly discretized into 100 points. The relative accuracy between the existing trajectories and corresponding reconstructed ones is calculated as follows.
where is the number of trajectories, is the number of points each trajectory is discretized into, values are the discretized values predicted by the twinGAN, values are the discretized values from the reference trajectories, and is an norm operation.
The fitting optimization reveals that the twinGAN with only three variables can provide around 99% accuracy on both the power and wing angle profiles (Table 3). Evaluating simulation models on the optimal trajectories in the training data and reconstructed trajectories presents a 99.9% accuracy on the energy, using the following equation.
Table 3.
twinGAN design variable parametric study.
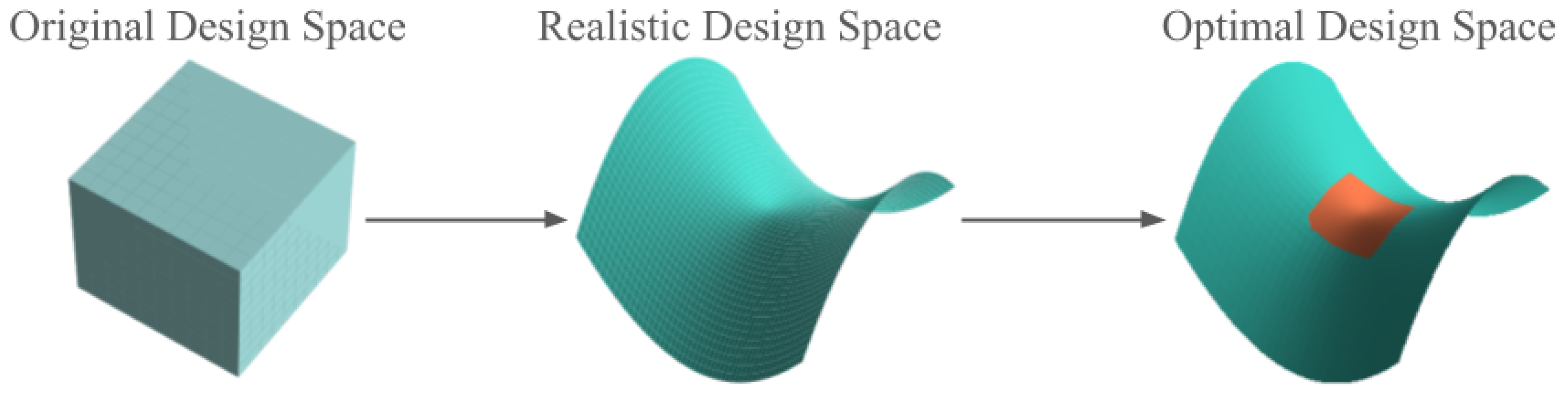
Thus, twinGAN manages to effectively reduce the design-space dimension from 40 B-spline control points to three twinGAN variables. The superior explicit dimensionality reduction results from the fact that the training data set contains only optimal trajectories, which share consistent and similar shapes (Figure 9). This consistency facilitates the training of the twinGAN model utilizing only three noise variables (Figure 10). Moreover, the twinGAN model generates only realistic trajectories, which are considered as implicit dimensionality reduction due to automatically filtering out unrealistic trajectories. Therefore, the twinGAN model exhibits two-fold dimensionality reductions, namely the explicit reduction by reducing the dimension of design space and the implicit reduction by generating only realistic trajectories.
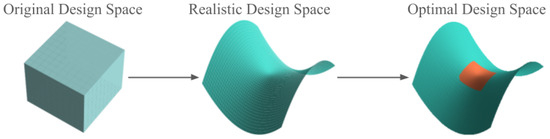
Figure 10.
Representation of the design space reduction achieved by the twinGAN model.
3.2. Surrogate Modeling
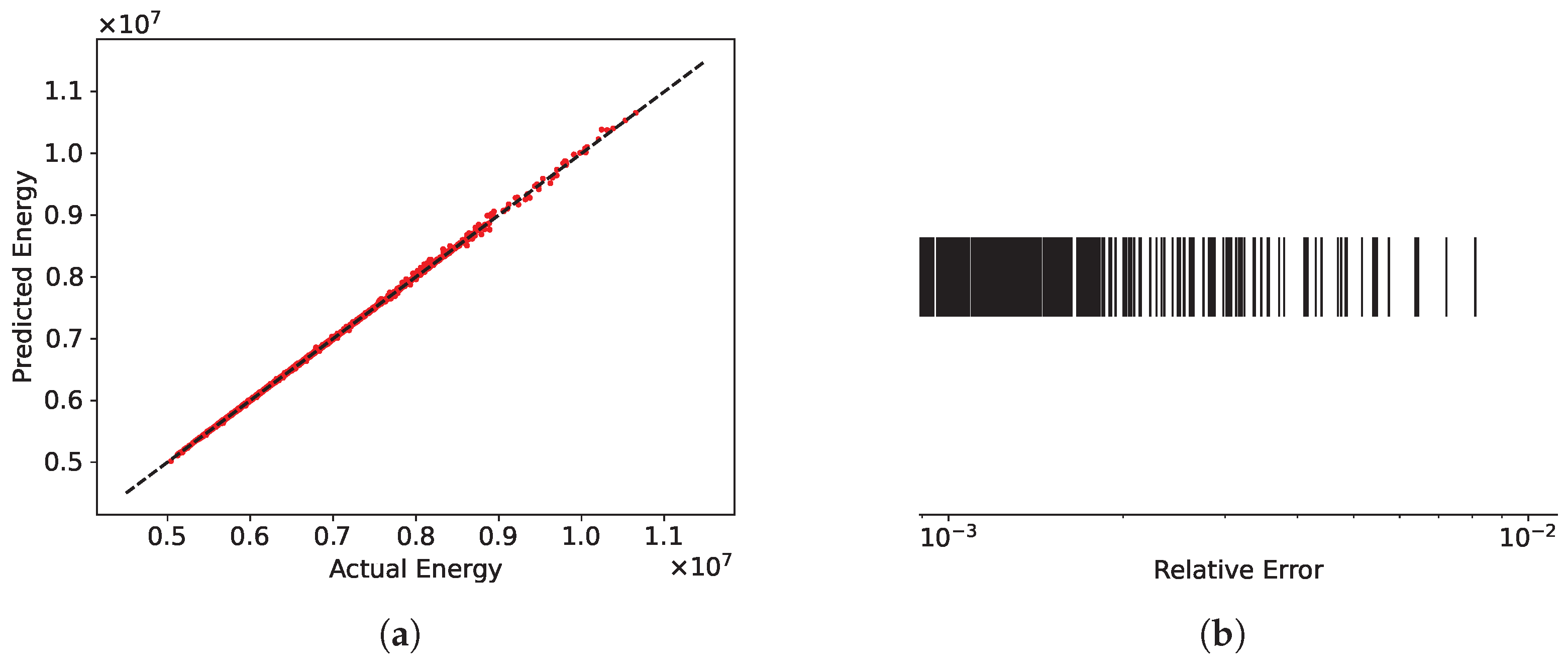
The surrogates used in this work include DNN for the scalar quantity (i.e., the energy consumption) and LSTM models for time-sequence response (e.g., the velocity trajectory). The surrogates read twinGAN variables, mass, efficiency, and total flight time as input. The three twinGAN variables are varied within the range of [0, 1] to generate the corresponding power and wing angle trajectories. The mass and efficiency are varied within the ranges of and based on the baseline values, following the same setup as the twinGAN training data. The total flight time is varied within [25, 35] seconds, which follows the twinGAN training data. The mass, efficiency, and time are all scaled to the same range of [0, 1] to facilitate the surrogate modeling process. All the samples are generated using the LHS method. The generated trajectories, together with LHS sampled mass, efficiency, and total flight time, are used in MDA to compute model response, including trajectories of displacements, velocity, acceleration, and angle of attack. The surrogates are trained, validated, and tested on 5504, 1376, and 2573 samples respectively. After training on MDA data, the surrogates directly predict MDA results and skip MDA iterations during surrogate-based design optimization. DNN-predicted energies achieve 99.9% accuracy compared against testing data (Figure 11), while LSTM-predicted vector responses (Figure 12, Figure 13 and Figure 14) achieve over 99% accuracy for most time-series quantities. Note that Bayesian parameter optimization is not performed on the LSTM models, since they have achieved ∼99% accuracy with generic parameters. Table 4 summarizes the generalization accuracy, as well as the number of training epochs of each surrogate model. The surrogates with the lowest validation errors are selected.
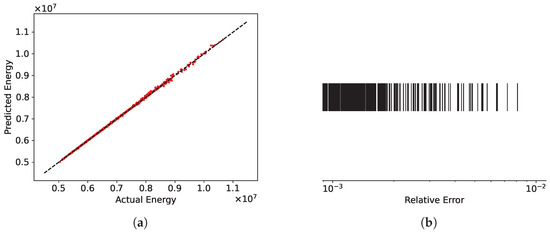
Figure 11.
The surrogate predicted energy is compared to the reference energy and matches well. The relative error (b) compares the surrogate energy predictions to the reference values. The relative error for all energy predictions is less than . (a) Comparison of surrogate prediction and reference energy. (b) Relative error of surrogate energy predictions.
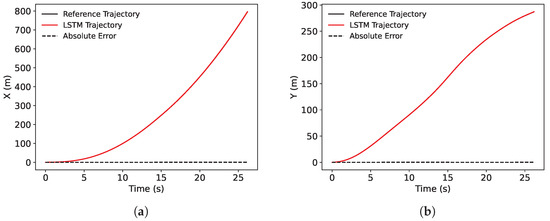
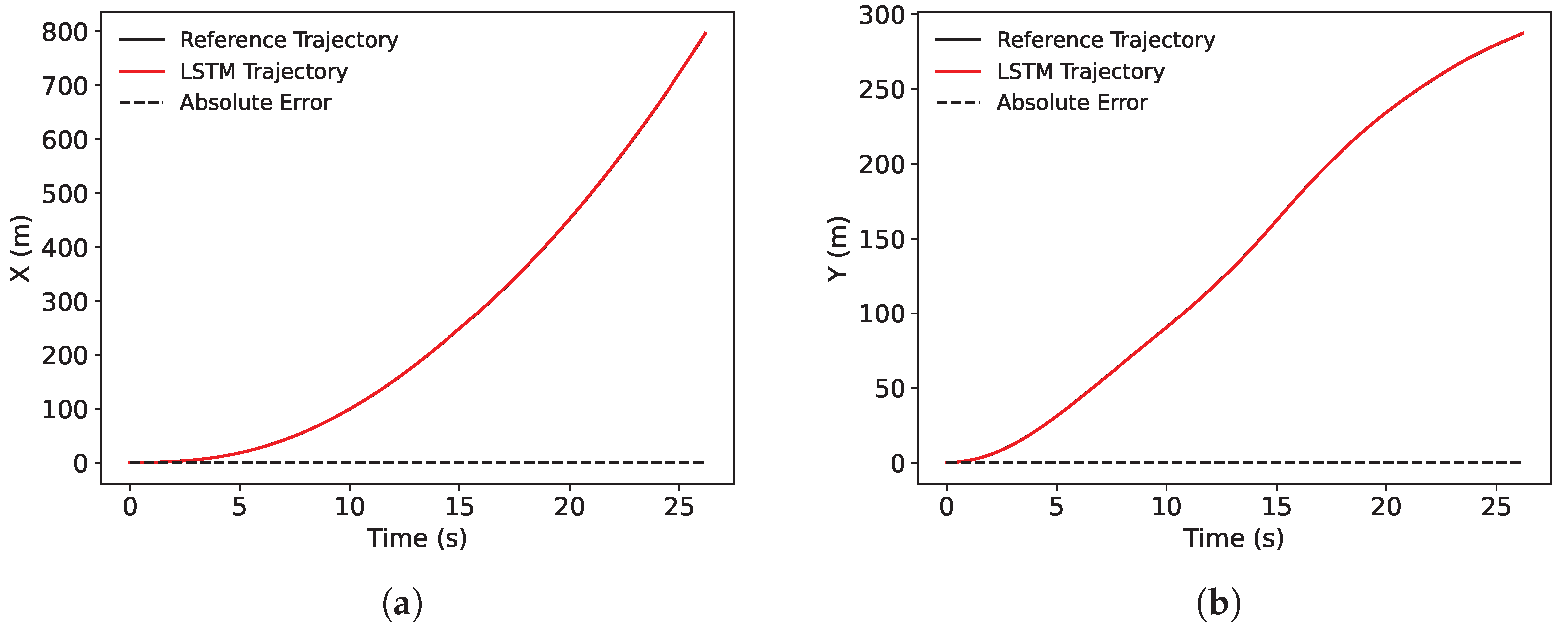
Figure 12.
Arbitrary X and Y position trajectories predicted by surrogates almost perfectly match the corresponding reference trajectories. (a) X position comparison. (b) Y position comparison.
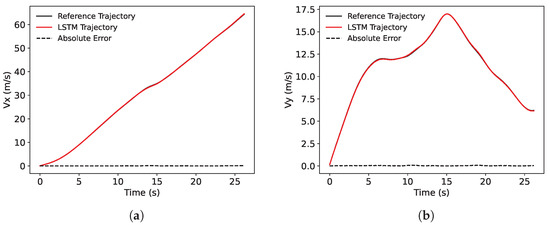
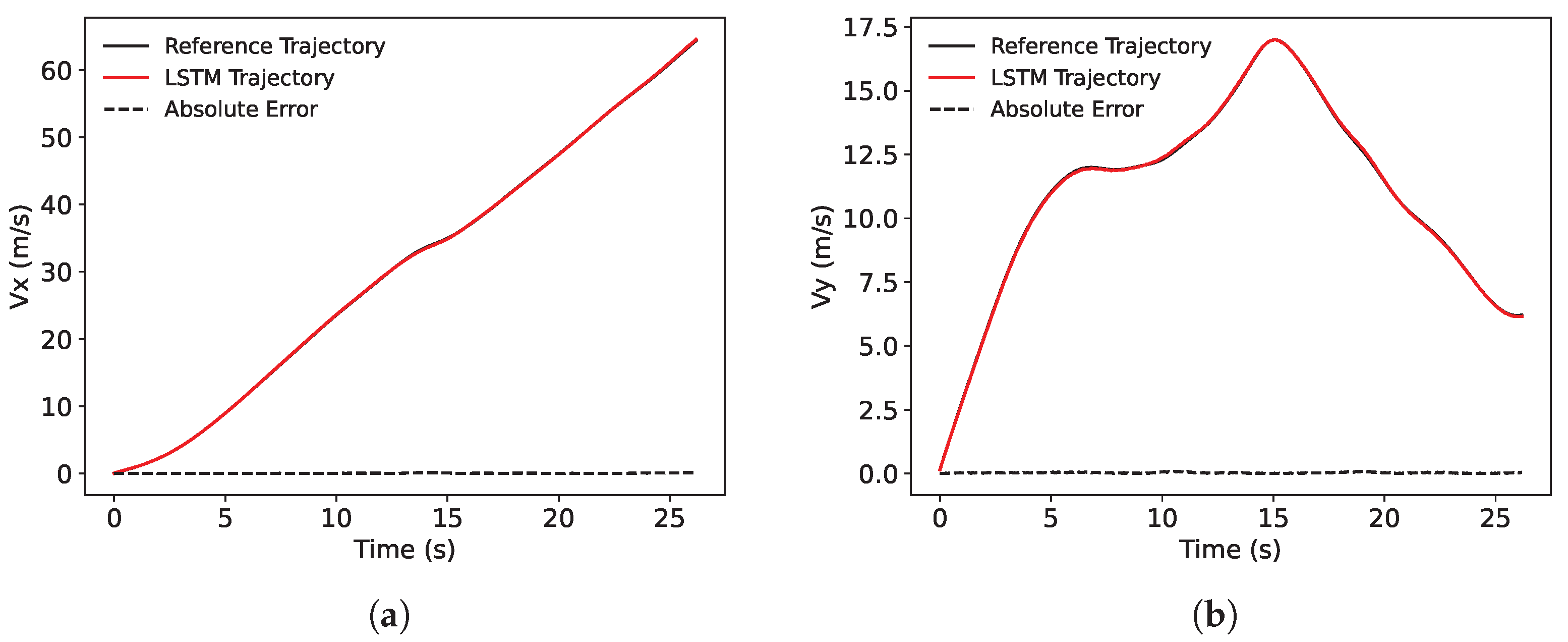
Figure 13.
Arbitrary Vx and Vy velocity trajectories predicted by surrogates almost perfectly match the corresponding reference trajectories. (a) Vx velocity comparison. (b) Vy velocity comparison.
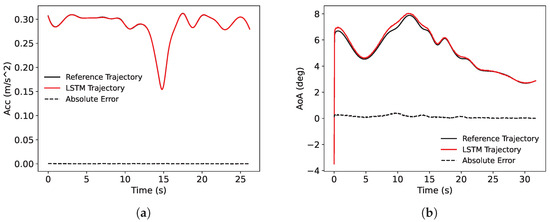
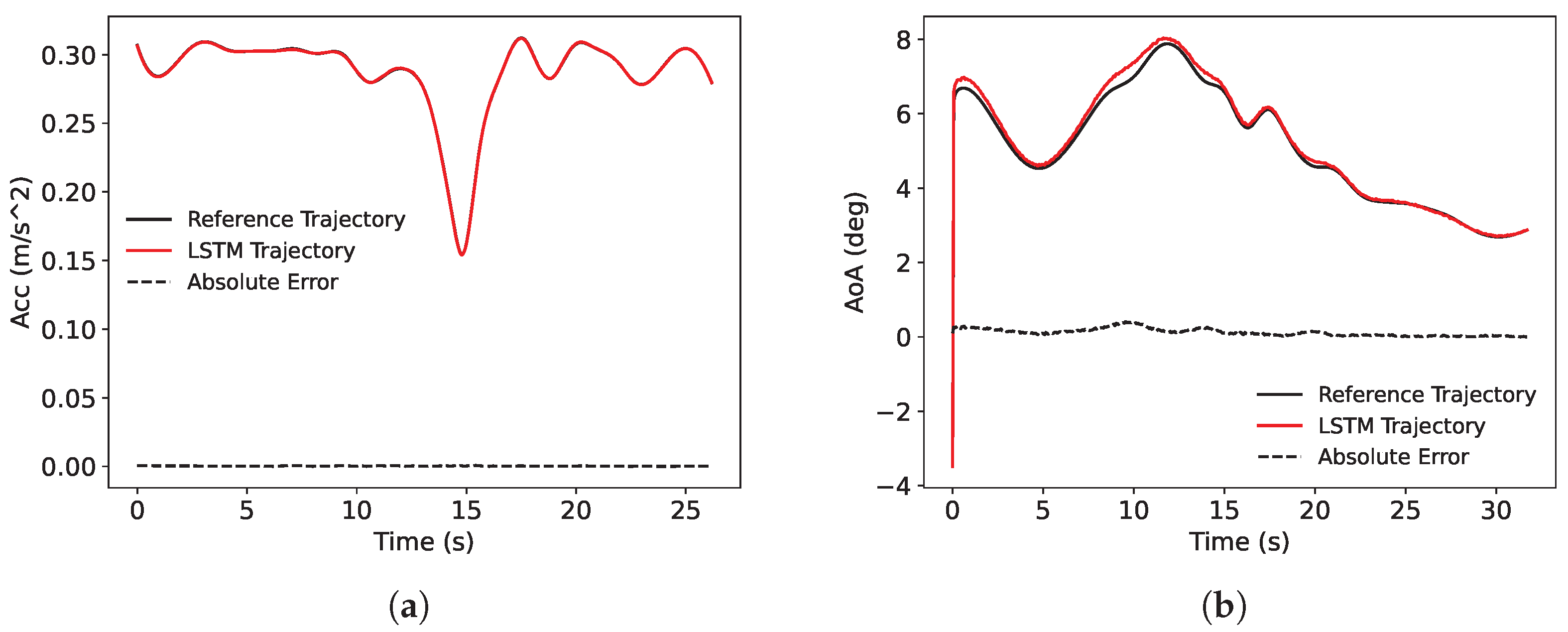
Figure 14.
Arbitrary acceleration and trajectories predicted by surrogates almost perfectly match the corresponding reference trajectories. (a) Acceleration comparison. (b) comparison.
Table 4.
Summary of surrogate accuracy.
3.3. Surrogate-Based Optimization
This section presents the surrogate-based design optimization results. Five represented locations in the design-requirement space were tested (Figure 15). The surrogate-based trajectory optimization was performed using the trust-constraint [45] optimizer within SciPy. The three twinGAN variables were optimized over the range of [0, 1]. The mass and efficiency of the aircraft were fixed for each optimization. An objective function tolerance of was used for the optimization. The objective function (i.e., energy consumption during takeoff) for the optimization was predicted by the DNN. There were five constraints and one penalty imposed on the optimization. The values for these constraints and penalties came from the LSTM networks. The penalized objective function of the surrogate-based trajectory design is
where
where f is the objective function returned to the optimizer, is the energy predicted by the DNN surrogate, and is the acceleration penalty. The penalty facilitates the convergence of surrogate-based design optimization.
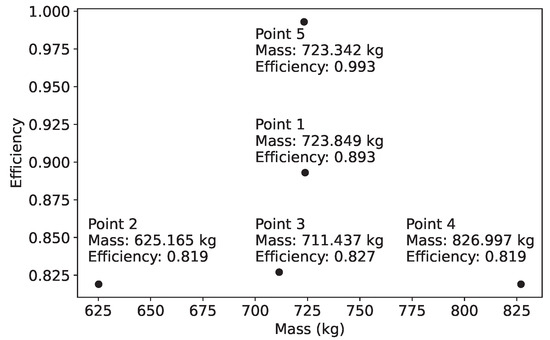
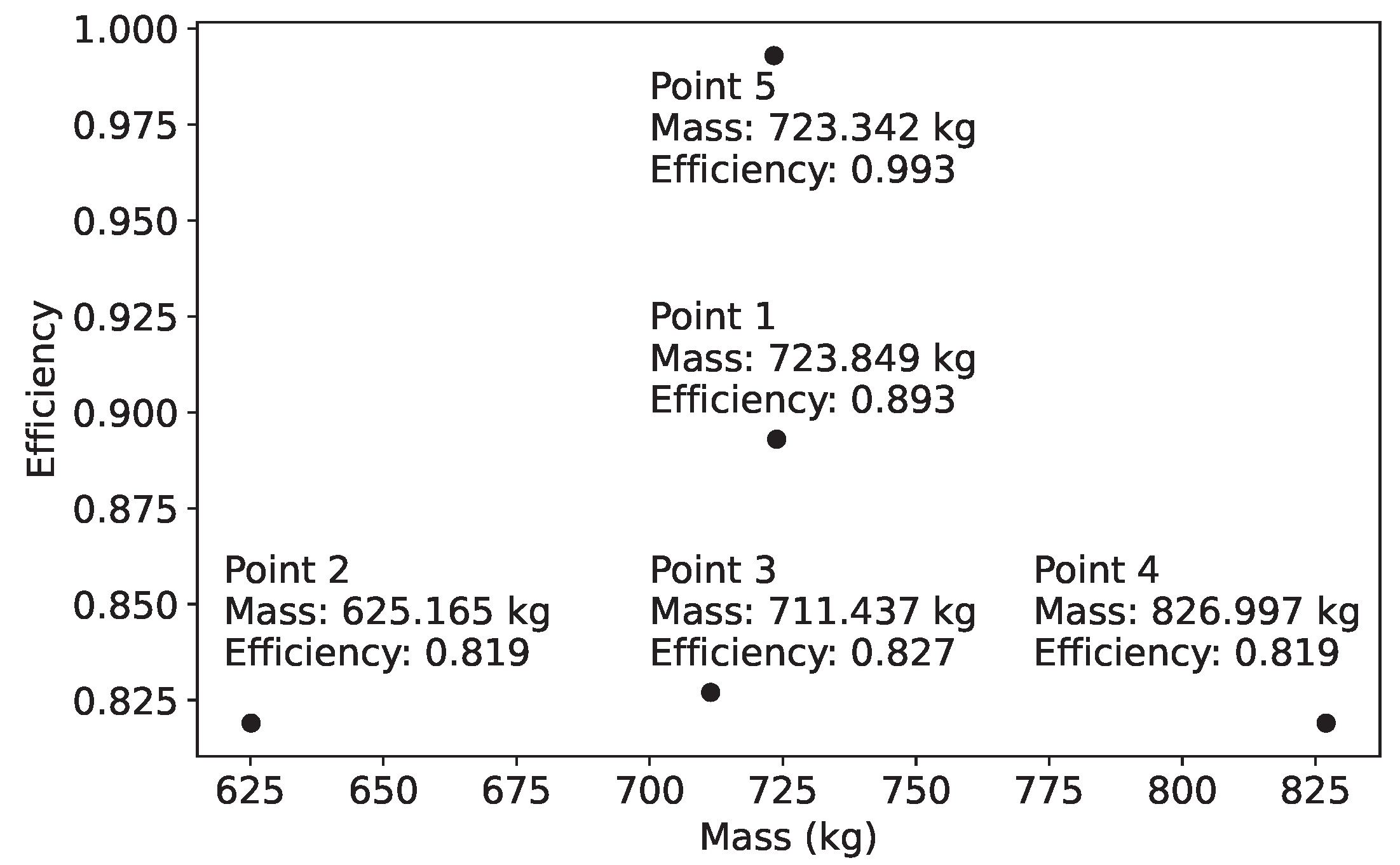
Figure 15.
Design space with test locations.
3.3.1. Center Point Results
First, the center of the design space was evaluated, which corresponds to Point 1 with a mass of 723.849 kg and an efficiency of 0.893. Table 5 shows that the surrogate-based optimal design matches the simulation-based optimal design (reference) with an accuracy of 98.74%. Directly evaluating the simulation model on the surrogate-based optimal design (verification) exhibits a 99.91% predictive accuracy. Figure 16 shows that the surrogate-based optimal design matches well with the simulation-based optimal design and simulation evaluation on the surrogate-based optimization.
Table 5.
Point 1 results (M = 723.849 kg, = 0.893).
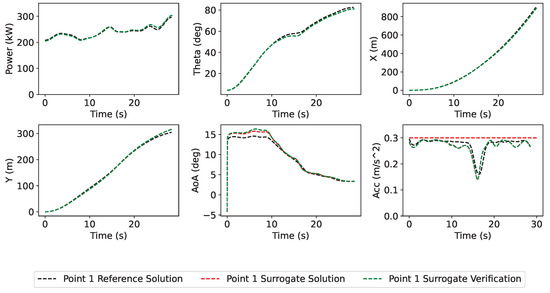
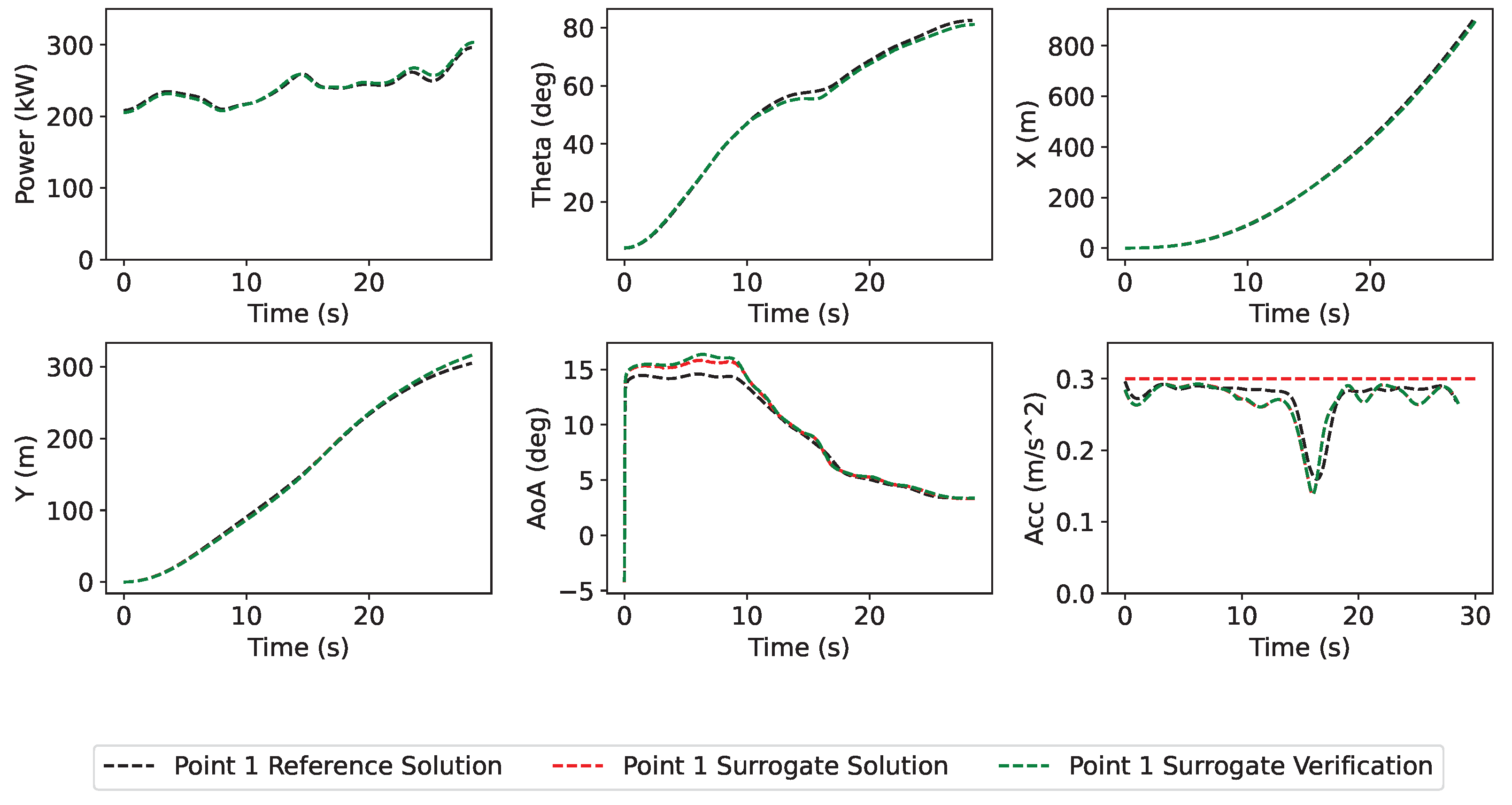
Figure 16.
Central design point trajectories.
The optimizer tends to minimize the time required for takeoff, since the total energy used is the integral of the power with respect to time. To achieve this, the optimizer uses a power setting that keeps the acceleration as close to the limit as possible. This is similar to a minimum time trajectory, which shows that all of the trajectories take approximately the same amount of time. It is noticeable that there is a consistent dip in the acceleration at 15 s, which aligns with a corresponding change in the angle of attack and wing angle. This is when the aircraft is transitioning between climbing and forward flight, which requires less power. The optimizer conserves energy by reducing the acceleration during this transition phase, which shows that the fastest takeoff does not correspond with the most efficient takeoff. After this transition is finished, the aircraft again maximizes the acceleration to accelerate to the desired cruise speed. During the flight, the power steadily increases, as sustaining an increased velocity requires more power.
3.3.2. Results by Varying Mass
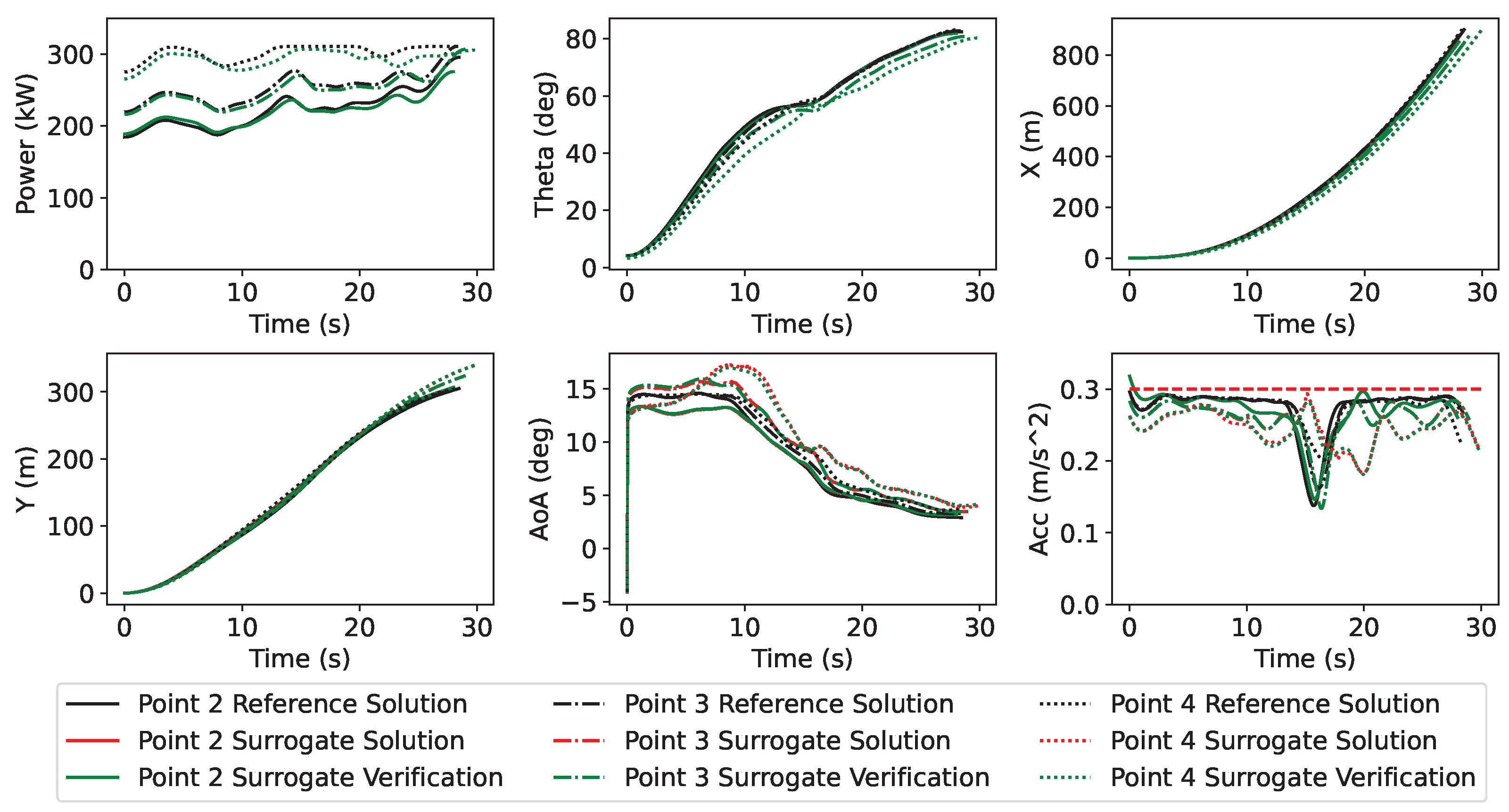
The design points that vary the mass of the aircraft are considered next. Point 2 has a mass of 625.165 kg and an efficiency of 0.819. Table 6 presents that the surrogate-based optimal design matches the reference with an accuracy of 96.43%. The surrogate verification exhibits a 99.83% accuracy. Point 3 has a mass of 711.437 kg and an efficiency of 0.827. Table 7 shows that the surrogate-based optimal design matches the reference with an accuracy of 99.81%. The surrogate verification exhibits 99.73% accuracy. Point 4 has a mass of 826.997 kg and an efficiency of 0.819. Table 8 presents that the surrogate-based optimal design matches the reference with an accuracy of 95.93% with the surrogate verification of 98.63% accuracy. Figure 17 shows the surrogate, reference, and verification trajectories for all of the design points’varying mass. The trajectories’ varying masses behave similarly to the trajectory of Point 1. The results show that increasing the mass proportionally increases the required power as expected. At Point 4, the flat sections of the power profile show that the takeoff is limited by the maximum available amount of power due to the higher mass.
Table 6.
Point 2 results (M = 625.165 kg, = 0.819).
Table 7.
Point 3 results (M = 711.437 kg, = 0.827).
Table 8.
Point 4 results (M = 826.997 kg, = 0.819).
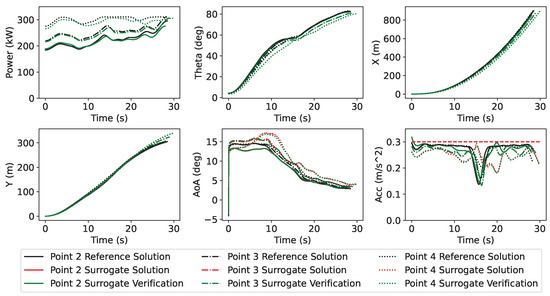
Figure 17.
Comparison of design points’ varying masses.
3.3.3. Results by Varying Efficiency
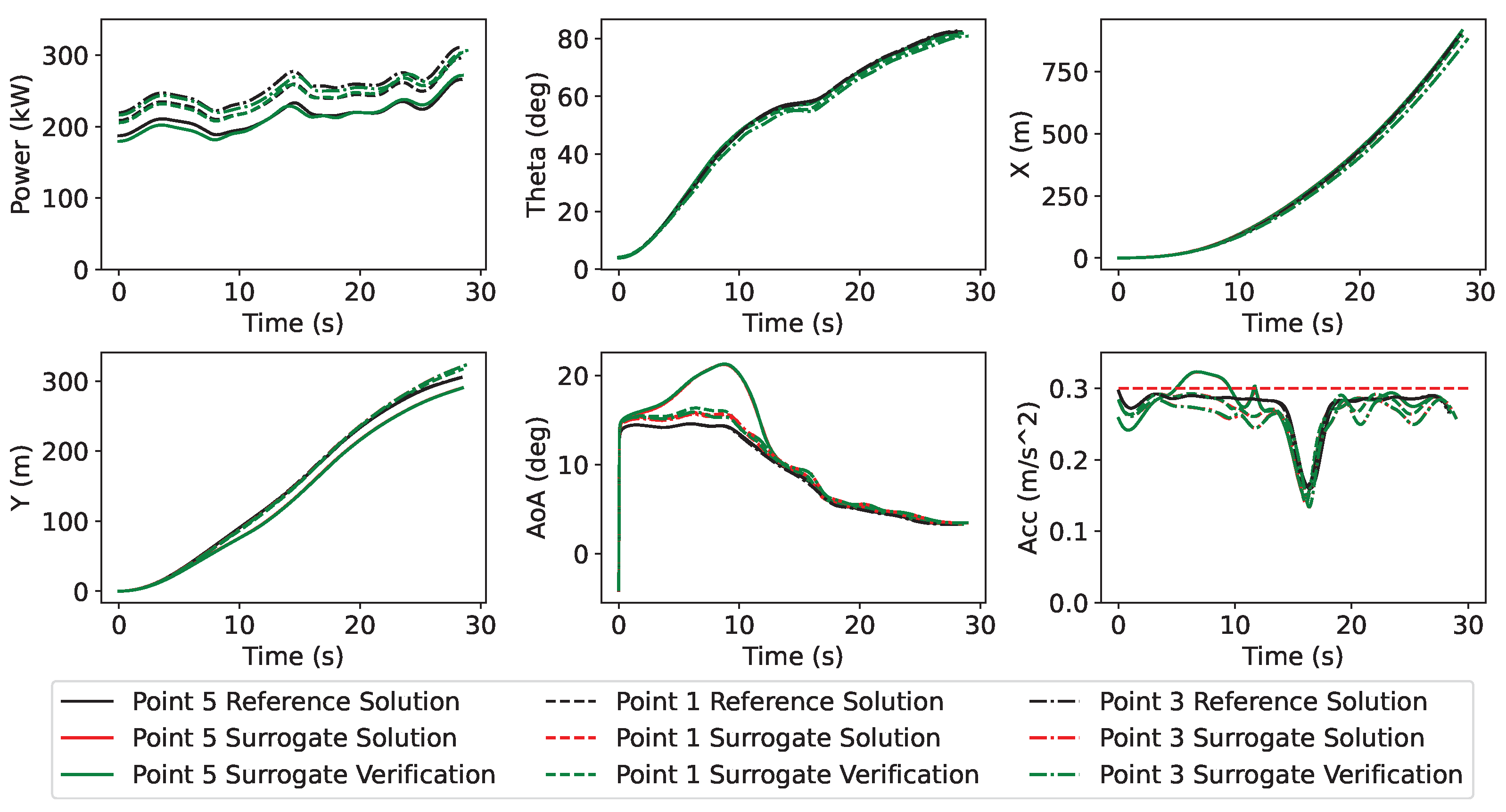
The design points, which vary the efficiency of the aircraft propulsion, are considered in this section. Point 5 has a mass of 723.342 kg and an efficiency of 0.993. Table 9 shows that the surrogate-based optimal design matches the reference with an accuracy of 99.33%. The Point 3 verification exhibits a 99.99% accuracy. This set of results also relies on Point 1 and Point 3, and the results for those points are shown in Table 5 and Table 7, respectively. Figure 18 shows the surrogate, reference, and verification trajectories for all of the design points’ varying efficiencies. The trajectories’ varying efficiencies behave similarly to that of the trajectory of Point 1. Increasing the efficiency proportionally increases the required power but on a smaller scale than the mass does.
Table 9.
Point 5 results (M = 723.342 kg, = 0.993).
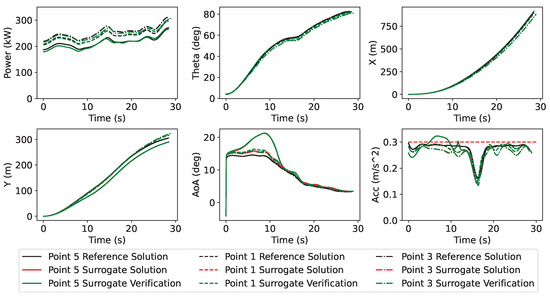
Figure 18.
Comparison of design points’ varying efficiency.
3.3.4. Summary
Increasing the mass or decreasing the efficiency can cause a substantial increase (∼30%) in the required energy. The primary difference when varying the mass or efficiency is a shift in the power trajectory. Importantly, for both the mass and efficiency variations, the power and wing angle profiles are consistently shaped, which allows the twinGAN to explicitly reduce the dimensionality of the problem. The optimal trajectory takes approximately the same amount of total flight time in this work.
Table 10 summarizes the relative accuracy and time that the optimization takes to run for each set of flight conditions. The average time to run a surrogate-based optimization is around 1.5 min, while the simulation-based design takes around 40 min on average. The surrogate-based optimizations performed here are approximately 26 times faster than the reference optimizations in the context of an average 98% accuracy.
Table 10.
Summary of optimization results.
4. Conclusions and Future Work
Urban air mobility (UAM) is seen as a future avenue of transportation in congested urban areas, and it has the potential to reduce pollutant emissions and humans’ travel time. This work constructed surrogate models, i.e., deep neural networks (DNNs) and long short-term memory (LSTM) networks for the fast takeoff trajectory design of electric vertical takeoff and landing (eVTOL) aircraft to minimize energy consumption. To facilitate the surrogate modeling, a twin-generator generative adversarial network (twinGAN) model was developed to parameterize the power and wing angle trajectories.
The twinGAN model exhibited sufficient variability to represent the training data and was able to match optimal takeoff trajectories with 99% accuracy. In addition, the twinGAN enabled implicit and explicit dimensionality reductions. The twinGAN implicitly reduced the dimension of the optimization problem by generating only realistic takeoff trajectories while conventional parameterization typically encounters many unrealistic trajectories. The twinGAN also explicitly reduced the dimension of the required parameterization variables from 40 to 3 design variables, which alleviated the “curse of dimensionality” issue for surrogate modeling. Thus, the DNN and LSTM surrogate predicted quantities of interest (such as the energy consumption and acceleration trajectory), with around 99% generalization accuracy at a reasonable training cost.
The surrogate-based optimization discovered optimal takeoff trajectories for a range of aircraft mass and efficiencies. Optimal trajectories tended to maximize the acceleration to minimize flight time and the total energy used. Additionally, optimal trajectories featured a reduction in wing angle and corresponding acceleration, which allowed the optimizer to save energy as the aircraft transitions from climb to cruise. The surrogate-based optimizations were able to achieve greater than 95% accuracy across the design space. Moreover, the surrogate-based optimization took 1.5 min on average, which was 26 times faster than the simulation-based reference optimizations. The capability of the surrogate-based optimizations to effectively and efficiently identify an optimal takeoff trajectory opens the possibility for in situ UAM trajectory optimization.
There are still challenges to be overcome in future work. For instance, improving the convergence of the simulation-based trajectory design will prepare a large range of training data for the twinGAN model. Moreover, the constraints of the surrogate-based optimal design are not guaranteed to be fully satisfied. Future work will improve the predictive performance of surrogates and investigate the effect of disturbances.
Author Contributions
Conceptualization, X.D.; methodology, S.S. and X.D.; software, S.S.; validation, S.S.; formal analysis, S.S.; investigation, S.S.; resources, X.D.; data curation, S.S.; writing—original draft preparation, S.S.; writing—review and editing, S.S. and X.D.; visualization, S.S.; supervision, X.D.; project administration, X.D.; funding acquisition, X.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data is available upon request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Texas A&M Transportation Institute. Urban Mobility Report; Texas A&M Transportation Institute: College Station, TX, USA, 2019. [Google Scholar]
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.D.; Kaiser, J.; Plötner, K.O. An overview of current research and developments in urban air mobility–Setting the scene for UAM introduction. J. Air Transp. Manag. 2020, 87, 101852. [Google Scholar] [CrossRef]
- Vascik, P.D.; Hansman, R.J. Development of vertiport capacity envelopes and analysis of their sensitivity to topological and operational factors. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 0526. [Google Scholar]
- Vascik, P.D. Systems-Level Analysis of on Demand Mobility for Aviation. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2017. [Google Scholar]
- Duffy, M.J.; Wakayama, S.R.; Hupp, R. A study in reducing the cost of vertical flight with electric propulsion. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; p. 3442. [Google Scholar]
- André, N.; Hajek, M. Robust environmental life cycle assessment of electric VTOL concepts for urban air mobility. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019; p. 3473. [Google Scholar]
- Courtin, C.; Burton, M.J.; Yu, A.; Butler, P.; Vascik, P.D.; Hansman, R.J. Feasibility study of short takeoff and landing urban air mobility vehicles using geometric programming. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 4151. [Google Scholar]
- Edwards, T.; Price, G. eVTOL Passenger Acceptance; Technical report; NASA: Washington, DC, USA, 2020. [Google Scholar]
- Graham, W.R.; Hall, C.A.; Morales, M.V. The potential of future aircraft technology for noise and pollutant emissions reduction. Transp. Policy 2014, 34, 36–51. [Google Scholar] [CrossRef]
- Gao, Z.; Yu, Y.; Wei, Q.; Topcu, U.; Clarke, J.P. Noise-Aware and Equitable Urban Air Traffic Management: An Optimization Approach. arXiv 2024, arXiv:2401.00806. [Google Scholar] [CrossRef]
- Falck, R.D.; Chin, J.; Schnulo, S.L.; Burt, J.M.; Gray, J.S. Trajectory Optimization of Electric Aircraft Subject to Subsystem Thermal Constraints. In Proceedings of the 18th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Chauhan, S.S.; Martins, J.R. Tilt-wing eVTOL takeoff trajectory optimization. J. Aircr. 2020, 57, 93–112. [Google Scholar] [CrossRef]
- Martins, J.R.R.A.; Ning, A. Engineering Design Optimization; Cambridge University Press: Cambridge, UK, 2022. [Google Scholar] [CrossRef]
- Panish, L.; Bacic, M. Transition Trajectory Optimization for a Tiltwing VTOL Aircraft with Leading-Edge Fluid Injection Active Flow Control. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- Malyuta, D.; Yu, Y.; Elango, P.; Açıkmeşe, B. Advances in trajectory optimization for space vehicle control. Annu. Rev. Control 2021, 52, 282–315. [Google Scholar] [CrossRef]
- Li, J.; Du, X.; Martins, J.R. Machine learning in aerodynamic shape optimization. Prog. Aerosp. Sci. 2022, 134, 100849. [Google Scholar] [CrossRef]
- Koziel, S.; Leifsson, L. Surrogate-based aerodynamic shape optimization by variable-resolution models. AIAA J. 2013, 51, 94–106. [Google Scholar] [CrossRef]
- Thelen, A.S.; Bryson, D.E.; Stanford, B.K.; Beran, P.S. Multi-fidelity gradient-based optimization for high-dimensional aeroelastic configurations. Algorithms 2022, 15, 131. [Google Scholar] [CrossRef]
- Queipo, N.V.; Haftka, R.T.; Shyy, W.; Goel, T.; Vaidyanathan, R.; Tucker, P.K. Surrogate-based analysis and optimization. Prog. Aerosp. Sci. 2005, 41, 1–28. [Google Scholar] [CrossRef]
- Alba, C.; Elham, A.; German, B.; Veldhuis, L.L. A surrogate-based multi-disciplinary design optimization framework exploiting wing-propeller interaction. In Proceedings of the 18th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Denver, CO, USA, 5–9 June 2017; p. 4329. [Google Scholar]
- Swischuk, R.; Kramer, B.; Huang, C.; Willcox, K. Learning physics-based reduced-order models for a single-injector combustion process. AIAA J. 2020, 58, 2658–2672. [Google Scholar] [CrossRef]
- Lazzara, M.; Chevalier, M.; Colombo, M.; Garcia, J.G.; Lapeyre, C.; Teste, O. Surrogate modelling for an aircraft dynamic landing loads simulation using an LSTM AutoEncoder-based dimensionality reduction approach. Aerosp. Sci. Technol. 2022, 126, 107629. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. Commun. ACM 2020, 63, 139–144. [Google Scholar] [CrossRef]
- Du, X.; He, P.; Martins, J.R. A B-spline-based generative adversarial network model for fast interactive airfoil aerodynamic optimization. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 2128. [Google Scholar]
- Jarry, G.; Couellan, N.; Delahaye, D. On the use of generative adversarial networks for aircraft trajectory generation and atypical approach detection. In Proceedings of the Air Traffic Management and Systems IV: Selected Papers of the 6th ENRI International Workshop on ATM/CNS (EIWAC2019) 6, Tokyo, Japan, 29–31 October 2019; Springer: Singapore, 2021; pp. 227–243. [Google Scholar]
- Yeh, S.T.; Du, X. Optimal Tilt-Wing eVTOL Takeoff Trajectory Prediction Using Regression Generative Adversarial Networks. Mathematics 2023, 12, 26. [Google Scholar] [CrossRef]
- Yeh, S.T.; Du, X. Transfer-Learning-Enhanced Regression Generative Adversarial Networks for Optimal eVTOL Takeoff Trajectory Prediction. Electronics 2024, 13, 1911. [Google Scholar] [CrossRef]
- Milz, D. Demonstrator of the A 3 Vahana. 2021. Available online: https://www.researchgate.net/figure/Demonstrator-of-the-A-3-Vahana-40_fig18_356207433 (accessed on 13 October 2023).
- Tangler, J.L.; Ostowari, C. Horizontal Axis Wind Turbine Post Stall Airfoil Characteristics Synthesization; Technical report; Solar Energy Research Inst.: Golden, CO, USA, 1991. [Google Scholar]
- Viterna, L.A.; Corrigan, R.D. Fixed pitch rotor performance of large horizontal axis wind turbines. In Proceedings of the Large Horizontal-Axis Wind Turbines (NASA-CP-2230), Cleveland, OH, USA, 28–30 July 1981; NASA Conference Publication: Washington, DC, USA, 1982; pp. 69–86. [Google Scholar]
- Prandtl, L. Induced Drag of Multiplanes; Technical Note NACA-TN-182; NACA: Cleveland, OH, USA, 1924.
- McLaughlin, M.D. Calculations, and Comparison with an Ideal Minimum, of Trimmed Drag for Conventional and Canard Configurations Having Various Levels of Static Stability; Technical Note NASA-TN-D-8391; NASA: Washington, DC, USA, 1977.
- de Young, J. Propeller at high incidence. J. Aircr. 1965, 2, 241–250. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2017, arXiv:1412.6980. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Distributed Systems. arXiv 2016, arXiv:1603.04467. [Google Scholar]
- O’Malley, T.; Bursztein, E.; Long, J.; Chollet, F.; Jin, H.; Invernizzi, L. KerasTuner. 2019. Available online: https://github.com/keras-team/keras-tuner (accessed on 21 April 2023).
- Sherstinsky, A. Fundamentals of Recurrent Neural Network (RNN) and Long Short-Term Memory (LSTM) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Uber Elevate Mission and Vehicle Requirements, 2018. An Online Document by Uber Elevate. Available online: https://s3.amazonaws.com/uber-static/elevate/Summary+Mission+and+Requirements.pdf?uclick_id=94f7ce27-0000-4343-a5f6-1a3e46edd6be (accessed on 14 May 2018).
- Gill, P.E.; Murray, W.; Saunders, M.A. SNOPT: An SQP Algorithm for Large-Scale Constrained Optimization. SIAM Rev. 2005, 47, 99–131. [Google Scholar] [CrossRef]
- McKay, M.D. Latin hypercube sampling as a tool in uncertainty analysis of computer models. In Proceedings of the 24th Conference on Winter Simulation, Arlington, VA, USA, 13–16 December 1992; pp. 557–564. [Google Scholar]
- Powell, M.J. An efficient method for finding the minimum of a function of several variables without calculating derivatives. Comput. J. 1964, 7, 155–162. [Google Scholar] [CrossRef]
- SciPy. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Conn, A.R.; Gould, N.I.; Toint, P.L. Trust Region Methods; SIAM: Philadelphia, PA, USA, 2000. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).