
Two-Stage Robust Optimization of Integrated Energy Systems Considering Uncertainty in Carbon Source Load

 ,
,
Abstract
:1. Introduction
2. Indirect Carbon Emissions from Electricity and Their Uncertainty
3. Integrated Energy System Modeling
- (1)
- IES supply and demand balance constraint of electrical load:
- (2)
- IES supply–demand balance constraint of heat load:
- (3)
- IES supply–demand balance constraint of cooling load:
- (4)
- IES indicated device running constraints:
- (5)
- Interaction constraints between IES and electricity and gas networks:where , , , , , , indicate the upper power limit of the corresponding energy device, kW; , , , , indicate the upper limit of power climbing for the corresponding energy equipment, kW; and is the upper limit of the system’s interaction with the power network, kW·h.
4. Two-Stage Robust Optimization Model and Transformation
4.1. The Standard Form of a Two-Stage Robust Optimization Model
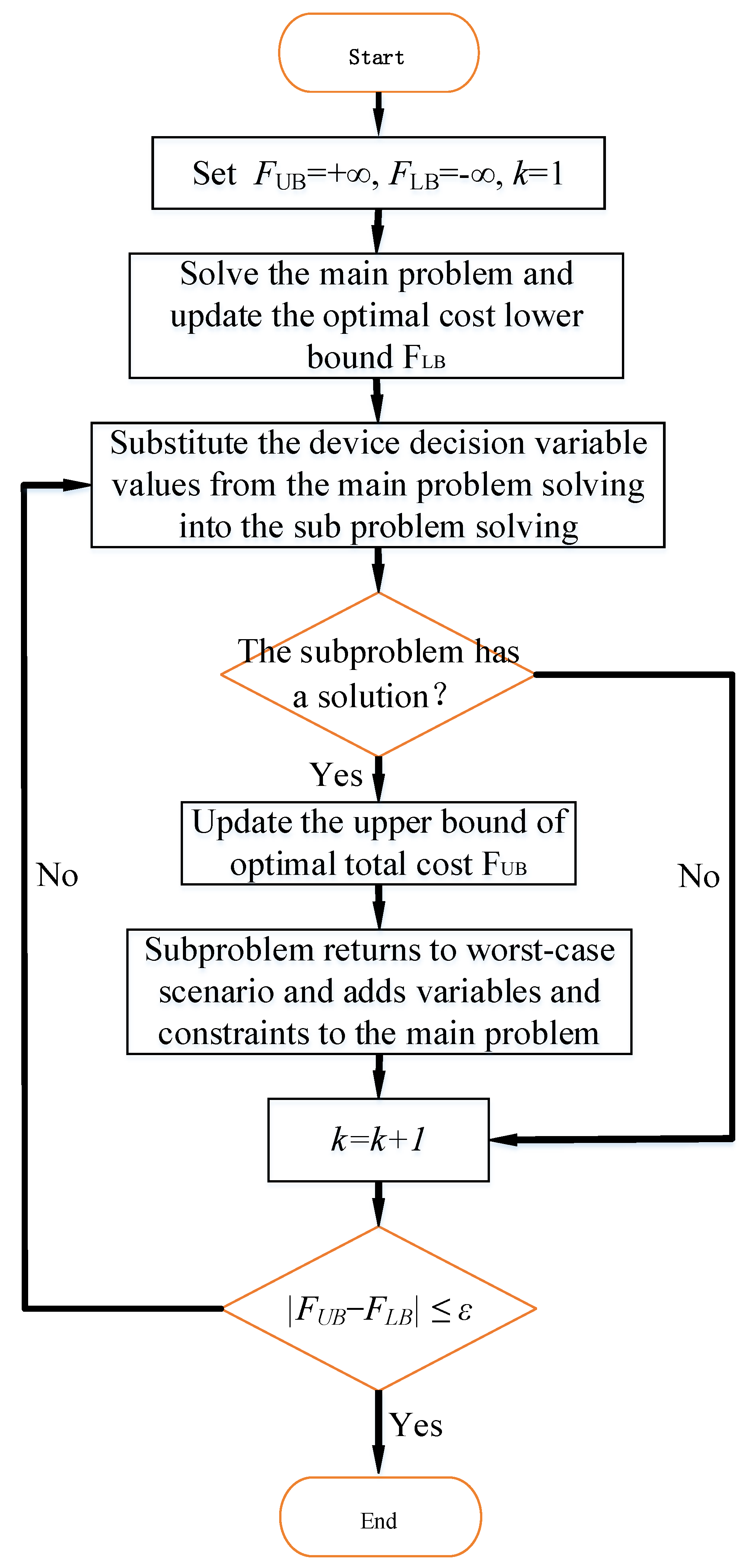
4.2. Column-and-Constraint Generation Algorithm
- Initialization: First, set the initial state, including the initial values of the decision variables and other necessary parameters.
- Generating candidate solutions: Based on the problem’s constraints, generate candidate solutions that satisfy the constraints, typically achieved using the Lagrange multiplier method.
- Column generation: Select the solution from the generated candidate solutions that contributes the most to the objective function, and add it to the main problem.
- Re-solving the main problem: Incorporate the newly added candidate solution into the main problem, and then re-solve to obtain a new optimal solution.
- Checking stop conditions: Check whether the stop conditions are met. If they are met, stop the algorithm and output the final optimal solution. If they are not met, return to step 2 and continue generating candidate solutions.
4.3. Karush–Kuhn–Tucker Condition and Its Transformation
5. The Application of the Algorithm
6. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| The carbon emissions generated per unit mass of the i-th type of fossil energy consumption, t | |
| The carbon flow of the k-th branch towards this node, tCO2/s | |
| The government provides the system with a total carbon emission quota for time period t, tCO2/MW·h | |
| The total actual carbon emissions of the system during time period t, t | |
| Power upper limit of energy equipment, kW | |
| The upper limit of interaction between the system and the power network, kW·h | |
| Indirect carbon emission intensity of electricity | |
| Predictive value of indirect carbon emission intensity from electricity, tCO2/MW·h | |
| The carbon trading cost of the system during time period t, CNY | |
| The total cost during the system operation cycle, CNY | |
| Upper limit of power ramp-up for energy equipment, kW | |
| The energy quality consumed per unit of electricity provided by the i-th type of fossil energy to the node, t | |
| The power flowing from the k-th branch to this node, kW | |
| The electricity provided by the i-th type of fossil energy flowing to this node, kW·h | |
| Actual value of photovoltaic output during period t of the system, kW | |
| Predictive value of photovoltaic output during system t period, kW | |
| Minimum charging power, kW | |
| Uncertainty variable capture equipment, kW | |
| The charging status of the battery | |
| The discharge state of the battery | |
| Daily stage cost, CNY | |
| Current cost, CNY | |
| Robust coefficient for controlling the range of uncertain parameter changes | |
| Battery charging and discharging efficiency | |
| The loss rate of electricity transmission provided by the i-th type of fossil energy | |
| Self-leakage rate |
Appendix A. McCormick Envelope Method
References
- Feng, C.; Liao, X. An overview of “Energy + Internet” in China. J. Clean. Prod. 2020, 258, 120630. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ker, P.J.; Mansor, M.; Lipu, M.H.; Al-Shetwi, A.Q.; Alghamdi, S.M.; Begum, R.A.; Tiong, S.K. Recent advancement of energy internet for emerging energy management technologies: Key features, potential applications, methods and open issues. Energy Rep. 2023, 10, 3970–3992. [Google Scholar] [CrossRef]
- Chang, P.; Li, C.; Zhu, Q.; Zhu, T.; Shi, J. Optimal scheduling of electricity and hydrogen integrated energy system considering multiple uncertainties. iScience 2024, 27, 109654. [Google Scholar] [CrossRef] [PubMed]
- Martinez-Mares, A.; Fuerte-Esquivel, C.R. A Robust Optimization Approach for the Interdependency Analysis of Integrated Energy Systems Considering Wind Power Uncertainty. IEEE Trans. Power Syst. 2013, 28, 3964–3976. [Google Scholar] [CrossRef]
- Mei, F.; Zhang, J.; Lu, J.; Lu, J.; Jiang, Y.; Gu, J.; Yu, K.; Gan, L. Stochastic optimal operation model for a distributed integrated energy system based on multiple-scenario simulations. Energy 2021, 219, 119629. [Google Scholar] [CrossRef]
- Lin, S.; Liu, C.; Shen, Y.; Li, F.; Li, D.; Fu, Y. Stochastic Planning of Integrated Energy System via Frank-Copula Function and Scenario Reduction. IEEE Trans. Smart Grid 2022, 13, 202–212. [Google Scholar] [CrossRef]
- Wu, M.; Yan, R.; Zhang, J.; Fan, J.; Wang, J.; Bai, Z.; He, Y.; Cao, G.; Hu, K. An enhanced stochastic optimization for more flexibility on integrated energy system with flexible loads and a high penetration level of renewables. Renew. Energy 2024, 227, 120502. [Google Scholar] [CrossRef]
- Yan, Y.; Huang, C.; Guan, J.; Zhang, Q.; Cai, Y.; Wang, W. Stochastic optimization of solar-based distributed energy system: An error-based scenario with a day-ahead and real-time dynamic scheduling approach. Appl. Energy 2024, 363, 123099. [Google Scholar] [CrossRef]
- Dong, B.; Li, P.; Yu, H.; Ji, H.; Song, G.; Li, J.; Zhao, J.; Wang, C. Chance-constrained optimal dispatch of integrated energy systems based on data-driven sparse polynomial chaos expansion. Sustain. Energy Technol. Assess. 2023, 60, 103546. [Google Scholar] [CrossRef]
- Wang, C.; Ju, P.; Wu, F.; Lei, S.; Pan, X. Long-Term Voltage Stability-Constrained Coordinated Scheduling for Gas and Power Grids with Uncertain Wind Power. IEEE Trans. Sustain. Energy 2022, 13, 363–377. [Google Scholar] [CrossRef]
- Aguilar, J.; Bordons, C.; Arce, A. Chance Constraints and Machine Learning integration for uncertainty management in Virtual Power Plants operating in simultaneous energy markets. Int. J. Electr. Power Energy Syst. 2021, 133, 107304. [Google Scholar] [CrossRef]
- Wu, G.; Li, T.; Xu, W.; Xiang, Y.; Su, Y.; Liu, J.; Liu, F. Chance-constrained energy-reserve co-optimization scheduling of wind-photovoltaic-hydrogen integrated energy systems. Int. J. Hydrogen Energy 2023, 48, 6892–6905. [Google Scholar] [CrossRef]
- Fan, H.; Wang, C.; Liu, L.; Li, X. Review of Uncertainty Modeling for Optimal Operation of Integrated Energy System. Front. Energy Res. 2022, 9, 641337. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Wang, R.; Sun, B.; Xie, W. Two-Stage Robust Optimization Model for Capacity Configuration of Biogas-Solar-Wind Integrated Energy System. IEEE Trans. Ind. Appl. 2023, 59, 662–675. [Google Scholar] [CrossRef]
- Silva-Rodriguez, L.; Sanjab, A.; Fumagalli, E.; Gibescu, M. Light robust co-optimization of energy and reserves in the day-ahead electricity market. Appl. Energy 2024, 353, 121982. [Google Scholar] [CrossRef]
- Gao, J.; Yang, Y.; Gao, F.; Wu, H. Two-Stage Robust Economic Dispatch of Regional Integrated Energy System Considering Source-Load Uncertainty Based on Carbon Neutral Vision. Energies 2022, 15, 1596. [Google Scholar] [CrossRef]
- Jiang, R.; Wang, J.; Guan, Y. Robust Unit Commitment with Wind Power and Pumped Storage Hydro. IEEE Trans. Power Syst. 2012, 27, 800–810. [Google Scholar] [CrossRef]
- Wang, P.; Zheng, L.; Diao, T.; Huang, S.; Bai, X. Robust Bilevel Optimal Dispatch of Park Integrated Energy System Considering Renewable Energy Uncertainty. Energies 2023, 16, 7302. [Google Scholar] [CrossRef]
- Zong, X.; Yuan, Y. Two-stage robust optimization of regional integrated energy systems considering uncertainties of distributed energy stations. Front. Energy Res. 2023, 11, 1135056. [Google Scholar]
- Zhao, Y.; Wei, Y.; Zhang, S.; Guo, Y.; Sun, H. Multi-Objective Robust Optimization of Integrated Energy System with Hydrogen Energy Storage. Energies 2024, 17, 1132. [Google Scholar] [CrossRef]
- Zhou, C.; Jia, H.; Jin, X.; Mu, Y.; Yu, X.; Xu, X.; Li, B.; Sun, W. Two-stage robust optimization for space heating loads of buildings in integrated community energy systems. Appl. Energy 2023, 331, 120451. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, F.; Shu, S.; Le, J.; Zhu, S. Distributionally robust optimization scheduling of electricity and natural gas integrated energy system considering confidence bands for probability density functions. Int. J. Electr. Power Energy Syst. 2020, 123, 106321. [Google Scholar] [CrossRef]
- Wang, M.; Shi, Z.; Luo, W.; Sui, Y.; Wu, D. Distributionally robust optimal scheduling of integrated energy systems including hydrogen fuel cells considering uncertainties. Energy Rep. 2023, 10, 1575–1588. [Google Scholar] [CrossRef]
- Cai, P.; Mi, Y.; Ma, S.; Li, H.; Li, D.; Wang, P. Hierarchical game for integrated energy system and electricity-hydrogen hybrid charging station under distributionally robust optimization. Energy 2023, 283, 128471. [Google Scholar] [CrossRef]
- Zhou, D.; Zhu, Z. Urban integrated energy system stochastic robust optimization scheduling under multiple uncertainties. Energy Rep. 2023, 9, 1357–1366. [Google Scholar] [CrossRef]
- Zhang, G.; Wen, J.; Xie, T.; Zhang, K.; Jia, R. Bi-layer economic scheduling for integrated energy system based on source-load coordinated carbon reduction. Energy 2023, 280, 128236. [Google Scholar]
- Li, F.; Wang, D.; Guo, H.; Zhang, J. Distributionally Robust Optimization for integrated energy system accounting for refinement utilization of hydrogen and ladder-type carbon trading mechanism. Appl. Energy 2024, 367, 123391. [Google Scholar] [CrossRef]
- Yang, B.; Ge, S.; Liu, H.; Zhang, X.; Xu, Z.; Wang, S.; Huang, X. Regional integrated energy system reliability and low carbon joint planning considering multiple uncertainties. Sustain. Energy Grids Netw. 2023, 35, 101123. [Google Scholar]
- Shi, Z.; Yang, Y.; Xu, Q.; Wu, C.; Hua, K. A low-carbon economic dispatch for integrated energy systems with CCUS considering multi-time-scale allocation of carbon allowance. Appl. Energy 2023, 351, 121841. [Google Scholar] [CrossRef]
- Wu, Q.; Li, C. Economy-environment-energy benefit analysis for green hydrogen based integrated energy system operation under carbon trading with a robust optimization model. J. Energy Storage 2022, 55, 105560. [Google Scholar]
- Zhou, Y.; Ge, J.; Li, X.; Zang, H.; Chen, S.; Sun, G.; Wei, Z. Bi-level distributionally robust optimization model for low-carbon planning of integrated electricity and heat systems. Energy 2024, 302, 131777. [Google Scholar] [CrossRef]
- Yang, D.; Xu, Y.; Liu, X.; Jiang, C.; Nie, F.; Ran, Z. Economic-emission dispatch problem in integrated electricity and heat system considering multi-energy demand response and carbon capture Technologies. Energy 2022, 253, 124153. [Google Scholar] [CrossRef]
- Yang, W.; Huang, Y.; Zhang, T.; Zhao, D. Mechanism and analytical methods for carbon emission-exergy flow distribution in heat-electricity integrated energy system. Appl. Energy 2023, 352, 121980. [Google Scholar] [CrossRef]
- Ding, N.; Guo, P.; Xi, Y.; Zhang, A.; Lei, X. Low-carbon development in power systems based on carbon emission analysis models: A comprehensive review. Sustain. Energy Technol. Assess. 2024, 65, 103774. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, Z. Low carbon economic scheduling model for a park integrated energy system considering integrated demand response, ladder-type carbon trading and fine utilization of hydrogen. Energy 2024, 290, 130311. [Google Scholar] [CrossRef]
- Shen, H.; Zhang, H.; Xu, Y.; Chen, H.; Zhang, Z.; Li, W.; Su, X.; Xu, Y.; Zhu, Y. Two stage robust economic dispatching of microgrid considering uncertainty of wind, solar and electricity load along with carbon emission predicted by neural network model. Energy 2024, 300, 131571. [Google Scholar] [CrossRef]
- Zhou, X.; Cai, C.; Li, Y.; Wu, J.; Zhan, Y.; Sun, Y. A robust optimization model for demand response management with source-grid-load collaboration to consume wind-power. Glob. Energy Interconnect. 2023, 6, 738–750. [Google Scholar] [CrossRef]
- Zhang, B.; Xia, Y.; Peng, X. Robust optimal dispatch strategy of integrated energy system considering CHP-P2G-CCS. Glob. Energy Interconnect. 2024, 7, 14–24. [Google Scholar] [CrossRef]
- Hebei Development and Reform Commission. 6 December 2022. Available online: https://hbdrc.hebei.gov.cn/zcfg_1238/szcfg/202309/t20230906_86169.html (accessed on 6 December 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Time | Purchasing Price (CNY/(kW·h) |
|---|---|---|
| Peak hour | 11:00–15:00, 19:00–21:00 | 1 |
| Normal period | 8:00–10:00, 16:00–18:00, 22:00–24:00 | 0.55 |
| Valley period | 1:00–7:00 | 0.2 |
| Equipment | SELF-Attrition Rate | Charge/Discharge Efficiency | Minimum | Maximum | Original State | Maximum Charge and Discharge Rate | Maintenance Cost/(CNY·kW−1) |
|---|---|---|---|---|---|---|---|
| accumulator | 0.01 | 0.95 | 0.2 | 0.8 | 0.3 | 0.2 | 0.0018 |
| Equipment | Rated Efficiency | Capacity | Maintenance Cost/(CNY·kW−1) |
|---|---|---|---|
| GT | 0.32/0.54 | 400 | 0.025 |
| GB | 0.9 | 600 | 0.04 |
| EB | 0.94 | 200 | 0.01 |
| AC | 1.3 | 100 | 0.012 |
| EC | 3 | 120 | 0.012 |
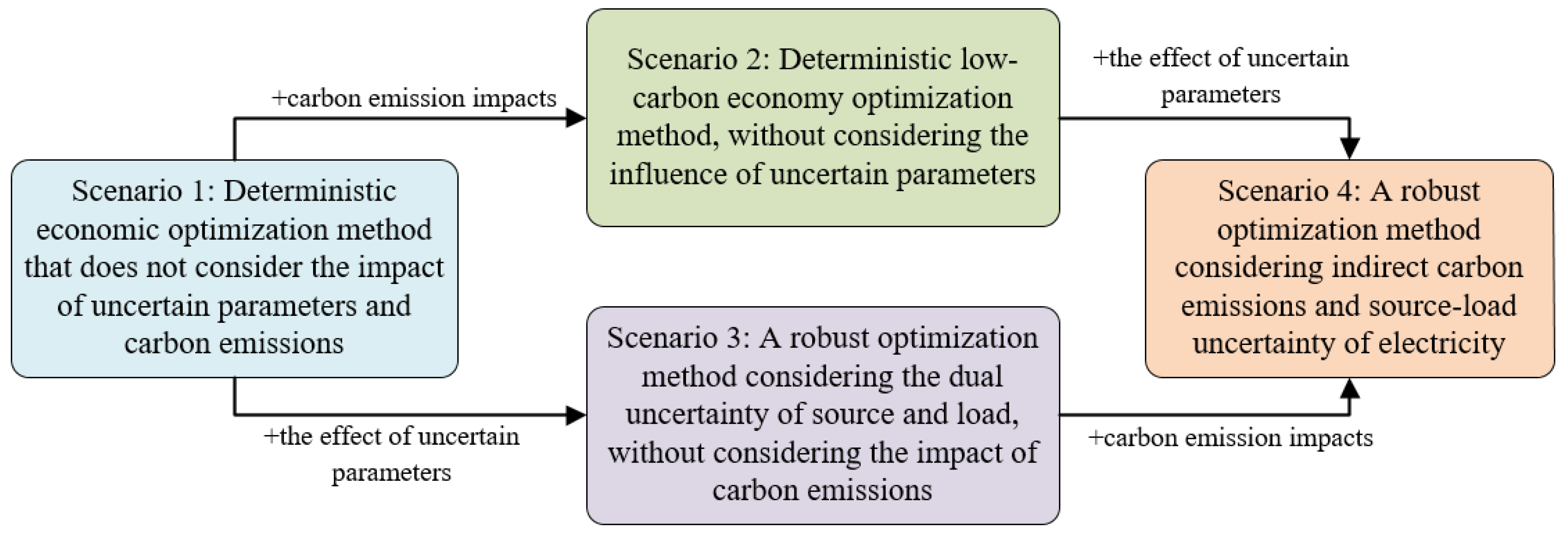
| Scenario | Total Cost/CNY | Running Cost/CNY | Carbon Emission Cost/CNY | Carbon Emission/kg |
|---|---|---|---|---|
| 1 | 7556.66 | 7556.66 | 0 | 12,884.99 |
| 2 | 8438.96 | 7563.86 | 875.10 | 12,553.23 |
| 3 | 12,205.60 | 12,205.60 | 0 | 16,872.14 |
| 4 | 11,590.98 | 12,148.19 | −557.21 | 16,661.94 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Zheng, B.; Wang, G.; Liu, W.; Guo, D.; Zou, L.; Pan, C. Two-Stage Robust Optimization of Integrated Energy Systems Considering Uncertainty in Carbon Source Load. Processes 2024, 12, 1921. https://doi.org/10.3390/pr12091921
Li N, Zheng B, Wang G, Liu W, Guo D, Zou L, Pan C. Two-Stage Robust Optimization of Integrated Energy Systems Considering Uncertainty in Carbon Source Load. Processes. 2024; 12(9):1921. https://doi.org/10.3390/pr12091921
Chicago/Turabian StyleLi, Na, Boyuan Zheng, Guanxiong Wang, Wenjie Liu, Dongxu Guo, Linna Zou, and Chongchao Pan. 2024. "Two-Stage Robust Optimization of Integrated Energy Systems Considering Uncertainty in Carbon Source Load" Processes 12, no. 9: 1921. https://doi.org/10.3390/pr12091921