The Bilinear Model Predictive Method-Based Motion Control System of an Underactuated Ship with an Uncertain Model in the Disturbance

Abstract
:1. Introduction
2. The Model of the Ship
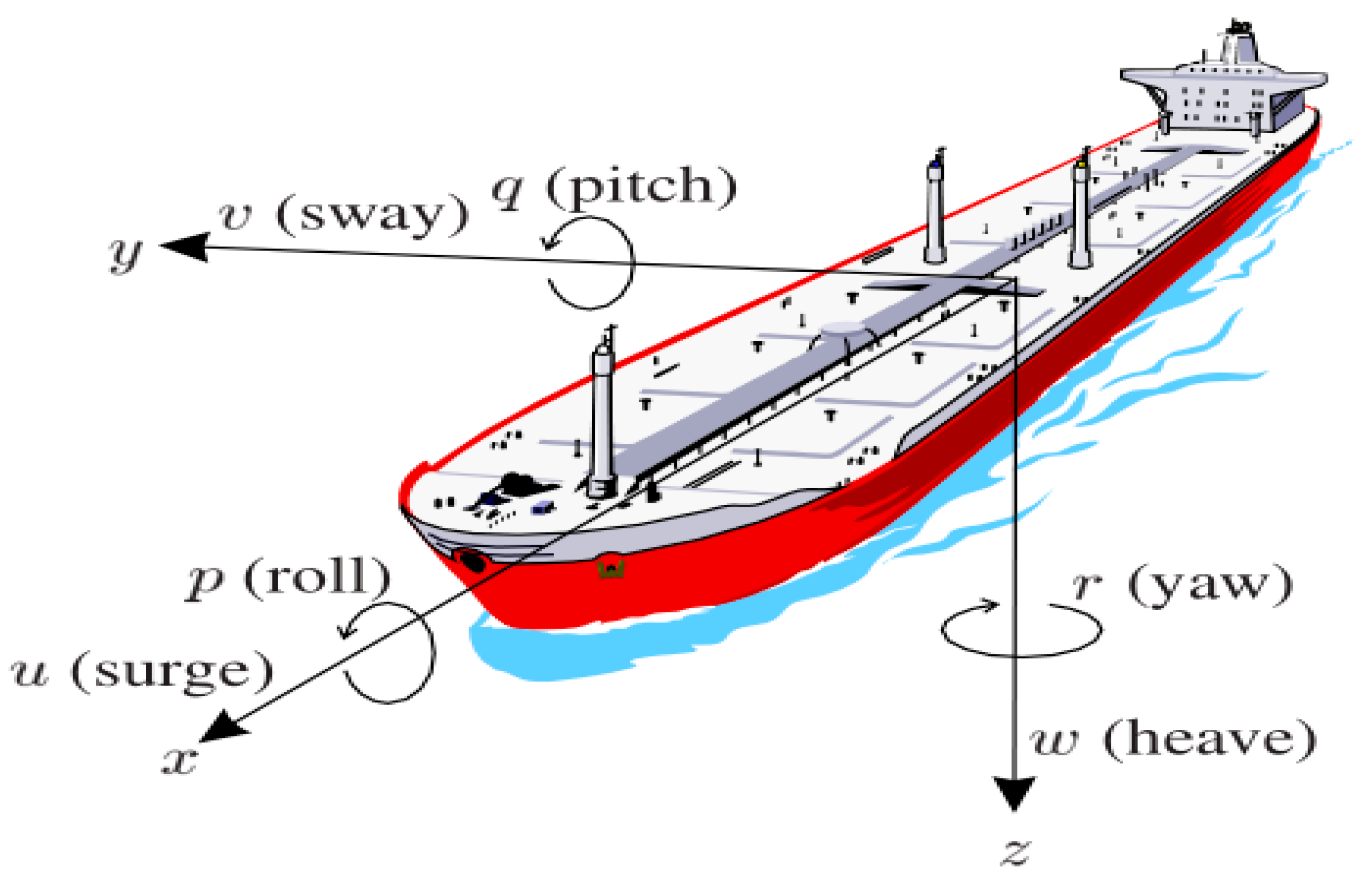
2.1. The Motion of the Ship
2.2. The Equations of Ship Motion
- denotes the inertial matrix;
- denotes the centrifugal and Coriolis forces;
- denotes the hydrodynamic damping matrix;
- denotes the orthogonal matrix;
- g(η) represents the gravity forces;
- is the vector of control torques, including the propeller force and the rudder force;
- represents disturbances from the environment.
- denotes the force distribution matrix, ;
- is the force and torque vector that is synthesized from the uncertainty components of the ship model and disturbance from the external environment.
3. Building the Control System
3.1. The Diagram of the Control System
3.2. The Bilinear Model of the Underactuated Ship in the Three-Freedom Space
3.3. Building the Direct State Observer Based on the Continuous Model
3.4. Building the Estimator to Compensate for the Uncertainty Component in the Model
3.5. Building the MPC Controller with Output-Feedback Based on the Separation Principle
- Step 1: Initialing and setting the forecasting window width , the sample period , and the calibration parameter of the set signal . Calculating according to (5), according to (8), and according to (13). Setting , ;
- Step 2: Setting the two positive symmetric matrices ;
- Step 3: Measuring and estimating . Calculating according to (8) and according to (13). Determining according to (17);
- Step 4: Determining according to (12) and according to (15) for the next cycle;
- Step 5: Determining the optimal solution according to (18);
- Step 6: Calculating from according to (12);
- Step 7: Using for controlling the continuous model (3), which is also the object (4) and (6);
- Step 8: Setting . If it needs to update G, go back to the step (2); otherwise, set and go back to step (3).
4. The Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fossen, T.I. Marine Control System-Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002. [Google Scholar]
- Do, K.D.; Pan, J. Control of Ships and Underwater Vehicles: Design for Underactuated and Nonlinear Marine Systems; Springer: London, UK, 2009. [Google Scholar]
- Ashrafiuon, H.; Kenneth, R.M.; Lucas, C.M.; Reza, A.S. Sliding-mode tracking control of surface vessels. IEEE Trans. Ind. Electron. 2008, 55, 4004–4012. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J.; Jiang, Z.P. Robust Adaptive Control of Underactuated Ships on a Linear Course with Comfort. Ocean Eng. 2003, 30, 2201–2225. [Google Scholar] [CrossRef]
- Chwa, D. Global Tracking Control of Underactuated Ships with Input and Velocity Constraints Using Dynamic Surface Control Method. IEEE Trans. Control Syst. Technol. 2010, 19, 1357–1370. [Google Scholar]
- Do, K.D.; Jiang, Z.P.; Pan, J. Robust adaptive path following of underactuated ships. Automatica 2004, 40, 929–944. [Google Scholar] [CrossRef]
- Liu, Y.; Bu, R.; Gao, X. Ship Trajectory Tracking Control System Design Based on Sliding Mode Control Algorithm. Polish Marit. Res. 2018, 25, 26–34. [Google Scholar] [CrossRef] [Green Version]
- Do, K.D.; Jiang, Z.P.; Pan, J. Underactuated Ship Global Tracking Under Relaxed Conditions. IEEE Trans. Autom. Control 2002, 47, 1529–1536. [Google Scholar] [CrossRef]
- Godhavn, J.M. Nonlinear tracking of underactuated surface vessels. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 13 December 1996; pp. 975–980. [Google Scholar]
- Serrano, M.E.; Gustavo, J.E.; Vicente, M.; Oscar, A.O.; Mario, J. Tracking trajectory of underactuated surface vessels: a numerical method approach. Control Eng. Appl. Inform. 2013, 15, 15–25. [Google Scholar]
- Dai, S.L.; He, S.; Wang, M.; Yuan, C. Adaptive neural control of underactuated surface vessels with prescribed performance guarantees. IEEE Trans. Neural Netw. Learn. Syst. 2018. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Zou, Z.; Yin, J. Trajectory tracking of underactuated surface vessels based on neural network and hierarchical sliding mode. J. Mar. Sci. Technol. 2015, 20, 322–330. [Google Scholar] [CrossRef]
- Ngongi, W.E.; Du, J. Controller Design for Tracking Control of an Under-Actuated Surface Ship. Int. J. Comput. Theory Eng. 2015, 7, 469. [Google Scholar] [CrossRef]
- Peng, Y.; Han, J.; Song, Q. Tracking control of underactuated surface ships: Using unscented Kalman filter to estimate the uncertain parameters. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 1884–1889. [Google Scholar]
- Wang, N.; Sun, Z.; Yin, G.; Sun, S.F.; Sharma, S. Finite-time observer based guidance and control of underactuated surface vehicles with unknown sideslip angles and disturbances. IEEE Access 2018, 6, 14059–14070. [Google Scholar] [CrossRef]
- Lin, X.; Jiang, H.; Nie, J.; Jiao, Y. Adaptive-sliding-mode trajectory tracking control for underactuated surface vessels based on NDO. In Proceedings of the 2018 International Conference on Mechatronics and Automation, Changchun, China, 5–8 August 2018; pp. 1043–1049. [Google Scholar]
- Liu, Z. Ship adaptive course keeping control with nonlinear disturbance observer. IEEE Access 2017, 5, 17567–17575. [Google Scholar] [CrossRef]
- Abdelaal, M.; Franzle, M.; Hahn, A. Nonlinear model predictive control for tracking of underactuated vessels under input constraints. In Proceedings of the European Modelling Symposium (EMS), Madrid, Spain, 6–8 October 2015; pp. 13–318. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley Sons Inc.: Chichester, UK, 1994. [Google Scholar]
- Phuoc, N.D.; Le, T.T. Constrained output tracking control for time-varying bilinear systems via RHC with infinite prediction horizon. J. Comput. Sci. Cybern. 2015, 31, 97–106. [Google Scholar] [CrossRef]
- Camacho, B. Model Predictive Control; Springer: London, UK, 2004. [Google Scholar]
- Moore, K.L. Iterative Learning Control for Deterministic Systems; Springer: London, UK, 1993. [Google Scholar]
- Liu, J. Intelligent Control Design and MATLAB Simulation; Springer: Singapore, 2018. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | N | N.M | Kg | Kg | Kgm2 | Kgs−1 | Kgs−1 | Kgm2s−1 |
| Value | 5,2.109 | 8,5.108 | 120.103 | 177,9.103 | 636.105 | 215.102 | 177.103 | 802.104 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, H.-Q.; Tran, A.-D.; Nguyen, T.-T. The Bilinear Model Predictive Method-Based Motion Control System of an Underactuated Ship with an Uncertain Model in the Disturbance. Processes 2019, 7, 445. https://doi.org/10.3390/pr7070445
Nguyen H-Q, Tran A-D, Nguyen T-T. The Bilinear Model Predictive Method-Based Motion Control System of an Underactuated Ship with an Uncertain Model in the Disturbance. Processes. 2019; 7(7):445. https://doi.org/10.3390/pr7070445
Chicago/Turabian StyleNguyen, Huu-Quyen, Anh-Dung Tran, and Trong-Thang Nguyen. 2019. "The Bilinear Model Predictive Method-Based Motion Control System of an Underactuated Ship with an Uncertain Model in the Disturbance" Processes 7, no. 7: 445. https://doi.org/10.3390/pr7070445